马尔科夫随机场
- 格式:ppt
- 大小:217.00 KB
- 文档页数:35
马尔可夫随机场能量函数马尔可夫随机场是一种概率图模型,它用于建模空间中的复杂结构,并对这些结构进行分析和预测。
在马尔可夫随机场中,每个节点代表一个变量,它们之间的关系由一组能量函数确定。
本文将重点介绍马尔可夫随机场中的能量函数。
一、能量函数的定义马尔可夫随机场中的能量函数是一种用于描述节点之间关系的函数。
它指定了每个节点的状态之间的相互作用,这些状态可以是二元的(如0和1)或多元的(如红、绿和蓝)。
每个节点的状态取值和它周围节点的状态取值的组合将决定整个系统的能量。
一个马尔可夫随机场的能量函数由如下形式的数学公式来表示:$E(X) = \sum_{C \in cliques}V_C(X_c)$其中,$X$为所有节点的状态向量,$C$是随机场中的一个团,$cliqes$表示所有的团,$X_c$表示团$C$中节点的状态向量,$V_C$则是团$C$的能量函数。
二、团在马尔可夫随机场中,团是指由多个节点组成的子集。
这些节点之间的关系可以是可访问的也可以是无序的。
每个团都有一个本质的最高节点,被称为扩展变量。
一个团可能包含一个或多个变量,但对于任何一个团,它所包含的任意两个变量之间都必须是有边相连的。
能量函数的主要作用是为随机场模型提供一个数学上的描述,以便于我们利用统计学的理论和方法进行建模和分析。
它指示了节点之间的相互作用,使得我们可以根据相应的统计规律进行预测和决策。
在马尔可夫随机场中,能量函数的值越低,它们所描述的状态就越合理。
这是由于能量函数的值衡量了整个系统的不确定性。
一个低能量状态表示系统的状态更加确定;而一个高能量状态,则表示系统更加不确定。
常见的马尔可夫随机场能量函数包括:二元势函数、高斯势函数、指数势函数等。
1. 二元势函数二元势函数是最基本的马尔可夫随机场能量函数之一。
它仅仅关注两个随机变量之间的相互作用,并确定它们之间的相互作用方式,通常形式如下:$V(x_i, x_j)=\begin{cases}1, & x_i=x_j \\0, & \text{otherwise}\end{cases}$高斯势函数是一种在马尔可夫随机场中刻画相邻节点之间相似性的能量函数。
机器学习——马尔可夫随机场(Ma...最近刚好在调研马尔可夫随机场,发现可以参考的资料少之⼜少,中⽂外⽂⽂献资料都相对较少。
按照仅有的知识稍作稍作整理⾃留以免之后⽤到再作查询。
有需要的也可以简单参考,但。
根据已有资料确实不太好理解,有简单明了易理解的还望推荐。
马尔可夫随机场(MRF):是关于⼀组有马尔可夫性质的随机变量X的全联合概率分布模型。
换句话说,若⼀组随机变量是马尔可夫随机场,那么其⼀定满⾜马尔可夫性质。
马尔可夫⽹络或是MRF在依赖性的表⽰上类似于贝叶斯⽹络。
两者的区别在于:贝叶斯⽹络是有向⽆环的,⽽马尔可夫⽹络是⽆向可以有环的。
因此,马尔可夫是可以表⽰某些贝叶斯⽹络⽆法表述的依赖关系,⽐如循环依赖。
另⼀⽅⾯,它也不能表⽰贝叶斯⽹络可以表述的依赖,⽐如诱发依赖。
马尔可夫随机场的底图可以是有限的也可以是⽆限的。
1.定义给定⼀个⽆向图G=(V,E),其中每个顶点v∈V表⽰⼀组随机变量X=(Xv),每条边{u,v}∈E表⽰随机变量u和v之间的⼀种依赖关系。
(1)成对马尔可夫性质:任意两个不相邻的变量相对给定的其他全部变量都是条件独⽴的。
(2)局部马尔可夫性质:所有其他变量的邻居变量都是条件独⽴的。
(3)全局马尔可夫性质:对于给定⼀个分离⼦集,任何两组变量都是条件独⽴的以上三个马尔可夫性质并不等价:全局马尔可夫性质强于局部马尔可夫性质,同样的,局部马尔可夫性质也强于成对马尔可夫性质。
Markov⽹Markov⽹也称 Markov 随机场(Markov random field,简称 MRF),是⼀个变量集合 X=(X1,X2,…,X n)∈χ的联合分布模型.它由⼀个⽆向图 G 和定义于 G 上的⼀组势函数φk组成.其中,⽆向图的每个节点都代表⼀个随机变量,⽽ G 中的每⼀个“团(clique)”都对应着⼀个势函数(为⾮负实函数),表⽰团的⼀个状态.Markov ⽹所代表的变量集的联合分布表⽰为P ( X = x ) =1/ Z ∏kφk(X{k}) (1)其中,X{k}表⽰Markov⽹中第k团的状态,即对应于第k个团中所有变量的取值状态。

19 无向图模型(马尔科夫随机场)19.1 介绍在第十章,我们讨论了图形化模型(DGMs),通常称为贝叶斯网。
然而,对于某些域,需要选择一个方向的边即(DGM), 例如,考虑建模一个图像。
我们可能会假设相邻像素的强度值是相关的。
我们可以创建一个DAG模型的2D拓扑如图19.1所示。
这就是所谓的因果MRF或马尔可夫网。
然而,它的条件独立性通常不好。
另一种方法是使用anundirected图形化模型(UGM),也称为马尔可夫随机场(MRF)或马尔可夫网络。
这些不需要我们指定边缘方向,在处理一些问题,如图像分析和空间统计数据时显得更自然。
例如,一个无向二维点阵显示(如图19.1(b));现在每个节点的马尔科夫Blanket只是最近邻节点,正如我们在19.2节所示的那样。
粗略地讲,在建立在DGMs上的UGMs的主要优点是:(1)它们是对称的,因此对某些领域更“自然”,如空间或关系数据;(2)Discriminativel UGMs(又名条件随机域,或CRFs),它定义了条件概率密度p(y|x),要比Discriminativel UGMs更好,我们在19.6.1节中解释原因。
相比于DGMs,UGMs的主要缺点是:(1)参数是可很难解释及模块化程度较差,我们在19.3节解释原因;(2)参数估计计算代价更高,原因我们在19.5节解释。
19.2 UGMs的条件独立性19.2.1UGMs通过简单的图分离定义CI关系如下:对于节点集的A,B,C,我们说X A ⊥G X B | X C,如果从在图G中把A从B中分离出来。
这意味着,当我们删除所有C 中的节,如果在A上没有任何连接的路径到B,那么CI 属性holds。
这就是所谓的UGMs的全局马尔可夫性质。
例如,在图19.2(b),有{ 1,2 }⊥{ 6、7 } | { 3、4、5 }。
图19.1节点的节点集呈现t有条件地独立于所有其他节点图为t的马尔科夫blanket;我们将表示通过mb(t)。
基于马尔可夫随机场的特征抽取方法研究与应用马尔可夫随机场是一种经典的概率图模型,广泛应用于自然语言处理、计算机视觉等领域。
特征抽取是机器学习和模式识别中的重要环节,它能够从原始数据中提取出有用的特征信息,为后续的模型训练和预测提供支持。
本文将探讨基于马尔可夫随机场的特征抽取方法的研究与应用。
一、马尔可夫随机场简介马尔可夫随机场是一种基于图模型的概率模型,它描述了一组随机变量之间的依赖关系。
在马尔可夫随机场中,每个节点表示一个随机变量,边表示变量之间的依赖关系。
马尔可夫随机场具有局部马尔可夫性质,即给定节点的状态,它的邻居节点的状态与其他节点的状态无关。
二、特征抽取方法特征抽取是将原始数据转化为能够被机器学习算法处理的特征表示的过程。
基于马尔可夫随机场的特征抽取方法主要包括两个步骤:特征定义和特征权重学习。
1. 特征定义在基于马尔可夫随机场的特征抽取中,需要定义一组特征函数。
特征函数是对数据进行特征化的函数,它将数据映射到一个实数值。
特征函数的定义需要根据具体的任务和数据特点进行选择。
例如,在自然语言处理中,可以定义基于词频、词性、句法结构等特征函数。
2. 特征权重学习特征权重学习是基于马尔可夫随机场的特征抽取的关键步骤。
特征权重决定了每个特征对最终预测结果的贡献程度。
特征权重学习可以通过最大似然估计、梯度下降等方法进行。
在学习过程中,需要定义目标函数,并通过迭代更新特征权重,使得目标函数达到最大值或最小值。
三、基于马尔可夫随机场的特征抽取应用基于马尔可夫随机场的特征抽取方法在自然语言处理、计算机视觉等领域有广泛的应用。
1. 自然语言处理在自然语言处理中,基于马尔可夫随机场的特征抽取方法可以用于词性标注、命名实体识别、句法分析等任务。
通过定义适当的特征函数,可以提取出词语的上下文信息、词性等特征,从而提高模型的性能。
2. 计算机视觉在计算机视觉中,基于马尔可夫随机场的特征抽取方法可以用于图像分割、目标识别等任务。
马尔可夫随机场(MRF)模型是一种描述图像结构的概率模型,是一种较好的描述纹理的方法。
它是建立在MRF 模型和 Bayes 估计基础上,按统计决策和估计理论中的最优准则确定问题的解。
其突出特点是通过适当定义的邻域系统引人结构信息,提供了一种一般用来表达空间上相关随机变量之间相互作用的模型,由此所生成的参数可以描述纹理不同方向、不同形式的集聚特征,更符合人的感官认识。
MRF 模型及其应用主要有两个分支:一是采用与局部Markov 性描述完全等价的Gibbs 分布;另一支是假设激励噪声满足高斯(Gauss)分布,从而得到一个由空域像素灰度表示的差分方程,称作高斯--马尔可夫随机场模型。
在实际应用中,由于高斯--马尔可夫随机场(GMRF)的计算量相对较小,获得了较为广泛的应用。
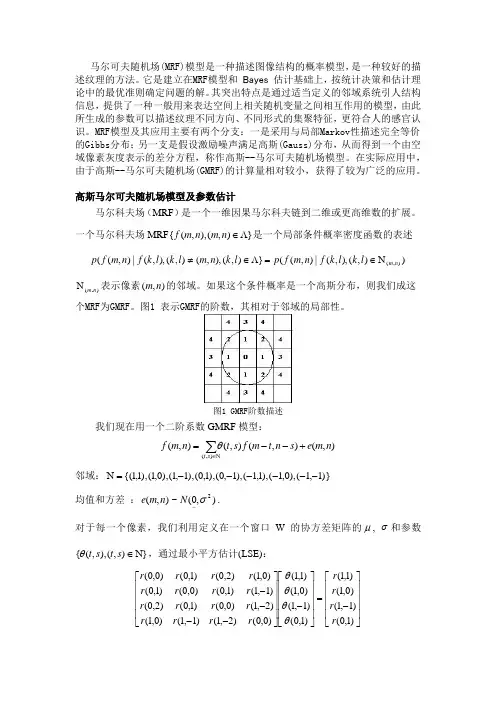
高斯马尔可夫随机场模型及参数估计马尔科夫场(MRF )是一个一维因果马尔科夫链到二维或更高维数的扩展。
一个马尔科夫场MRF }),(),,({Λ∈n m n m f 是一个局部条件概率密度函数的表述)),(),,(|),((}),(),,(),(),,(|),((),(n m l k l k f n m f p l k n m l k l k f n m f p N ∈=Λ∈≠),(n m N 表示像素),(n m 的邻域。
如果这个条件概率是一个高斯分布,则我们成这个MRF 为GMRF 。
图1 表示GMRF 的阶数,其相对于邻域的局部性。
图1 GMRF 阶数描述我们现在用一个二阶系数GMRF 模型:),(),(),(),(),(n m e s n t m f s t n m f s t +--=∑N∈θ邻域:)}1,1(),0,1(),1,1(),1,0(),1,0(),1,1(),0,1(),1,1{(------=N 均值和方差 :),0(~),(2σ-N n m e .对于每一个像素,我们利用定义在一个窗口W 的协方差矩阵的μ, σ和参数}),(),,({N ∈s t s t θ,通过最小平方估计(LSE):⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----)1,0()1,1()0,1()1,1()1,0()1,1()0,1()1,1()0,0()2,1()1,1()0,1()2,1()0,0()1,0()2,0()1,1()1,0()0,0()1,0()0,1()2,0()1,0()0,0(r r r r r r r r r r r r r r r r r r r r θθθθ∑N∈-=),(2),(),()0,0(s t s t r s t r θσ∑∈--=Wn m ws n t m f n m f N s t r ),(),(),(1),(∑∈=Wn m wn m f N ),(),(1μw N 表示窗口W 的像素的个数。
马尔可夫随机场的原理与应用马尔可夫随机场(Markov Random Field,MRF)是一种数学模型,用于描述随机变量之间的关联关系。
它被广泛应用于图像处理、模式识别、计算机视觉等领域,具有很高的实用价值。
本文将介绍马尔可夫随机场的原理以及其在实际应用中的相关技术。
一、马尔可夫随机场的原理马尔可夫随机场是一种无向图模型,用于描述随机变量之间的条件依赖关系。
它基于马尔可夫性质,即给定某个节点的取值,该节点与其相邻节点之间的取值是无关的。
这个性质使得马尔可夫随机场在建模多变量关联问题时十分有用。
马尔可夫随机场由两个要素构成:节点和势函数。
节点表示随机变量,势函数表示节点之间的依赖关系。
通常,这个依赖关系可以通过概率分布来表达。
势函数的定义需要满足一定条件,以保证模型的合理性和可解性。
二、马尔可夫随机场的应用1. 图像分割马尔可夫随机场可以应用于图像分割问题。
图像分割是将图像划分成不同的区域或对象的过程。
通过定义节点和势函数,可以建立马尔可夫随机场模型,利用节点之间的条件依赖关系,实现图像的自动分割。
2. 目标识别在计算机视觉领域,目标识别是一个重要的研究方向。
马尔可夫随机场可以应用于目标识别问题,通过定义节点和势函数,对图像中的目标进行建模和推断。
这可以帮助计算机识别和理解图像中的目标物体,提高自动化处理的准确性和效率。
3. 人脸识别人脸识别是一种重要的生物特征识别技术,广泛应用于安全监控、人脸支付等领域。
马尔可夫随机场可以应用于人脸识别问题,通过建立人脸的马尔可夫随机场模型,对人脸的特征和结构进行建模和分析,实现人脸的自动识别。
4. 文本挖掘在自然语言处理领域,文本挖掘是一项重要的研究任务。
马尔可夫随机场可以应用于文本挖掘问题,通过建立文本的马尔可夫随机场模型,对文本的结构和语义进行建模和分析,实现文本的自动分类、情感分析等任务。
三、总结马尔可夫随机场是一种重要的数学模型,具有广泛的应用价值。
马尔可夫网络在图像识别中的应用一、介绍马尔可夫网络是一种数学模型,用于描述一系列可能的状态以及这些状态之间的转移概率。
它在许多领域都有着广泛的应用,其中之一就是在图像识别中。
通过马尔可夫网络,可以对图像进行分析和识别,从而实现自动化的图像识别和分类。
二、马尔可夫网络在图像分割中的应用图像分割是图像处理领域的一个重要任务,它的目标是将图像分割成具有语义上有意义的区域。
马尔可夫网络可以用于图像分割中,通过对图像中像素的状态进行建模,来实现对图像的自动分割。
马尔可夫随机场是一种常用于图像分割的马尔可夫网络模型。
它通过对图像中相邻像素之间的关系进行建模,来实现对图像的分割。
通过对图像进行分割,可以实现对图像中不同区域的识别和分析。
三、马尔可夫网络在目标识别中的应用除了图像分割,马尔可夫网络还可以用于目标识别。
在目标识别中,我们的目标是识别图像中的特定物体或者场景。
马尔可夫网络可以通过对图像中不同区域的状态进行建模,来实现对目标的识别。
在目标识别中,通常会使用基于特征的方法来描述图像中不同区域的状态。
通过对这些特征之间的关系进行建模,可以使用马尔可夫网络来实现对目标的识别。
通过对图像中不同区域的状态进行建模,可以实现对目标的自动识别和分类。
四、马尔可夫网络在图像生成中的应用除了对图像进行分割和识别,马尔可夫网络还可以用于图像的生成。
通过对图像中像素的状态进行建模,可以使用马尔可夫网络来实现对图像的生成。
在图像生成中,通常会通过对图像中不同区域的像素进行建模,来实现对图像的生成。
通过对图像中不同区域的状态进行建模,可以使用马尔可夫网络来实现对图像的自动生成。
五、总结马尔可夫网络在图像识别中有着广泛的应用。
通过对图像中不同区域的状态进行建模,可以使用马尔可夫网络来实现对图像的分割、识别和生成。
马尔可夫网络的应用为图像识别领域带来了新的可能性,为实现自动化的图像识别和分析提供了新的方法和思路。
希望通过不断的研究和探索,能够进一步发挥马尔可夫网络在图像识别中的作用,为图像识别领域的发展做出更大的贡献。
一种基于马尔可夫随机场的影像纹理分类方法随着数字影像技术的不断发展,影像分类成为了很多领域中的必要技术。
其中,影像纹理分类是一项很有挑战性的任务。
本文将介绍一种基于马尔可夫随机场的影像纹理分类方法,这种方法能够在纹理分类中发挥重要作用。
在影像分类中,纹理是一个很重要的特征。
影像中的不同对象拥有不同的纹理,因此纹理可以用来帮助识别不同的对象。
影像纹理分类将影像划分为不同的区域,每个区域有其不同的纹理。
在纹理分类中,马尔可夫随机场是一种广泛使用的技术。
马尔可夫随机场模型可以用来描述相邻像素之间的关系,从而建立纹理分类模型。
在本文提出的基于马尔可夫随机场的影像纹理分类方法中,首先要建立一个能够捕捉影像像素之间空间关系的图像邻域系统。
其中,邻域大小是一个重要的参数,需要根据实际情况进行选择。
然后,对邻域内的像素进行灰度值差分,并通过灰度值差分矩阵计算不同像素之间的关系。
接下来,将这些关系表示成一个马尔可夫随机场模型。
对于马尔可夫随机场模型,从中选择特征向量可以提取出纹理特征。
一般而言,图像纹理特征可以表示为相邻像素之间的灰度值关系。
通过对这些特征向量进行分类,即可实现影像纹理分类。
为了验证这种基于马尔可夫随机场的影像纹理分类方法的性能,我们将其应用于标准的图像分类数据集。
实验结果表明,这种方法在纹理分类方面表现出色,尤其是在复杂纹理场景中能够比其他方法更好地区分不同的像素。
综上所述,基于马尔可夫随机场的影像纹理分类方法是一种有效的纹理分类技术,它可以在纹理分析上发挥重要作用。
我们相信这种方法可以在实际应用中带来更好的效果,并对各种场景中的影像分类问题提供更好的解决方案。