MAX706 利用μP复位电路控制Vcc电源
- 格式:pdf
- 大小:121.17 KB
- 文档页数:1
功能监控器MAX705/706/813中文资料。
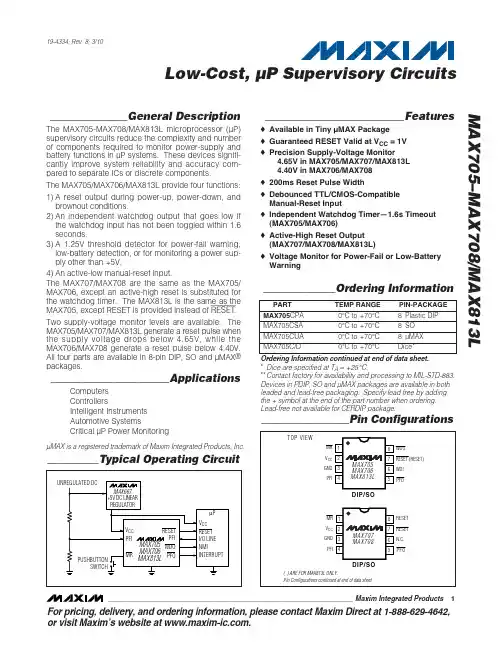
概述MAX705/706/813L是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器(MPU或mP)或微控制器(MCU或mC)的工作状态。
将常用的多项功能集成到一片8脚封装的小芯片内,与采用分立元件或单一功能芯片组合的电路相比,大大减小了系统电路的复杂性和元器件的数量,显著提高了系统可靠性和精确度。
该系列产品采用3种不同的8脚封装形式:DIP、SO和mMAX。
主要应用于:微处理器和微控制器系统;嵌入式控制器系统;电池供电系统;智能仪器仪表;通信系统;寻呼机;蜂窝移动电话机;手持设备;个人数字助理(PDA);电脑电话机和无绳电话机等等。
功能说明RESET/RESET操作复位信号用于启动或者重新启动MPU/MCU,令其进入或者返回到预知的循环程序并顺序执行。
一旦MPU/MCU处于未知状态,比如程序“跑飞”或进入死循环,就需要将系统复位。
对于MAX705和MAX706而言,在上电期间只要Vcc大于1.0V,就能保证输出电压不高于0.4V的低电平。
在Vcc上升期间RESET维持低电平直到电源电压升至复位门限(4.65V或4.40V)以上。
在超过此门限后,内部定时器大约再维持200ms后释放RESET,使其返回高电平。
无论何时只要电源电压降低到复位门限以下(即电源跌落),RESET引脚就会变低。
如果在已经开始的复位脉冲期间出现电源跌落,复位脉冲至少再维持140ms。
在掉电期间,一旦电源电压Vcc降到复位门限以下,只要Vcc不比1.0V还低,就能使RESET维持电压不高于0.4V的低电平。
MAX705和MAX706提供的复位信号为低电平RESET,而MAX813L提供的复位信号为高电平RESET,三者其它功能完全相同。
有些单片机,如INTEL的80C51系列,需要高电平有效的复位信号。
看门狗定时器MAX705/706/813L片内看门狗定时器用于监控MPU/MCU的活动。
max706tesa+工作原理MAX706TESA+是一种用于电子设备中的可编程电源管理集成电路(PMIC),它能够管理各种类型的电源,提供稳定的电压输出和高效的电能转换。
MAX706TESA+的工作原理是基于对电源管理的需求和电子设备的特性进行分析和处理,通过内部的控制逻辑和外部的反馈机制实现对电源的有效管理。
本文将详细介绍MAX706TESA+的工作原理,包括其基本的工作方式、内部结构和关键技术等内容。
1. MAX706TESA+的基本工作方式MAX706TESA+是一种集成了多种功能的可编程电源管理集成电路,它主要包括电压控制器、功率开关、电流传感器、温度传感器和接口电路等部分。
MAX706TESA+的基本工作方式是通过对输入电压进行采样和分析,并根据设定的电压输出值调节功率开关的工作状态和占空比,从而实现对输出电压的精确控制。
同时,MAX706TESA+还可以通过内部的控制逻辑和外部的反馈机制来调节输出电流和保护电路的工作状态,以确保电源的稳定和安全。
2. MAX706TESA+的内部结构MAX706TESA+的内部结构主要包括电源管理单元(PMU)、功率转换单元(PCU)和接口单元(IFU)等部分。
其中,PMU主要负责对输入电压和输出电压进行采样和分析,并根据设定的参数进行控制;PCU主要负责实现电能转换和功率开关的控制;IFU主要负责实现与外部设备的通信和控制。
通过这些部分的协同工作,MAX706TESA+可以实现对电源的全面管理和控制。
3. MAX706TESA+的关键技术MAX706TESA+采用了多种关键技术来实现对电源的高效管理,包括高性能开关电源器件、精密传感器和先进的控制算法等。
其中,高性能开关电源器件可以实现高效的电能转换和稳定的电压输出;精密传感器可以实现对电压、电流和温度等参数的精确采样和测量;先进的控制算法可以实现对电源的智能控制和保护。
这些关键技术的应用使得MAX706TESA+能够满足各种电子设备的电源管理需求,提供稳定的电源输出和高效的能源转换。

MAX706S在DSP系统中的应用
MAX706S在DSP系统中的应用
MAX706S在DSP系统中的应用
陈晓明
【期刊名称】《国外电子元器件》
【年(卷),期】2007(000)007
【摘要】微处理器监控电路MAX706S具有看门狗、上电自动复位、人工复位功能及低电压报警功能,并且价格低廉,使用方便可靠,将之应用于DSP系统中能有效提高系统的可靠性和抗干扰能力.文中介绍了MAX706S的主要特性及其在DSP系统中的应用原理,并给出了实用的电路设计方案.
【总页数】3页(P65-67)
【作者】陈晓明
【作者单位】武汉高压研究院,湖北,武汉,430074
【正文语种】中文
【中图分类】TP368.1
【相关文献】
1.ADSP TS201S Link口在多DSP系统中的应用 [J], 赵俊杰;孙大光
2.MAX706在微处理器系统中的应用 [J], 邹于丰
3.DS1B820在TMS320VC5402DSP系统中的应用研究[J], 戴育良;杨善晓
4.MATLAB7.0在TI C2000 DSP系统设计中的应用 [J], 梅亮;林辉;薛丽英
5.嵌入式uIP TCP/IP协议栈在基于DSP系统中的应用 [J], 谢文娣
因版权原因,仅展示原文概要,查看原文内容请购买。
摘要新一代汽车研究与开发将集中表现在信息技术、微电子技术、计算机技术、智能自动化技术、人工智能技术、网络技术、通信技术在汽车上的应用。
智能汽车是是现代汽车发展的方向。
大学生智能车比赛是智能汽车设计的一个实践平台,光电传感器的自动循迹智能车系统,采用光电传感器作为道路信息的采集传感器,单片机为控制系统的核心来处理信号和控制小车行驶。
MC9S12系列单片机在汽车电子控制领域得到广泛应用。
本课题就是利用Freescale的MC9S12XS128微控制器对智能车系统进行设计。
智能车系统设计包括硬件电路和控制软件系统的设计。
硬件系统使用专门软件Altium Designer设计。
硬件电路系统主要包括freescale单片机最小系统、电源管理系统、路径识别与检测系统、电机驱动系统。
而控制系统软件的设计主要包括单片机的初始化、PID控制算法、路径识别算法、舵机控制算法、速度控制算法。
软件设计是用Freescale公司的Codewarrior软件作为软件开发和仿真下载的平台。
最后完成了整个自动循迹智能车系统设计。
关键字:智能车;光电传感器;自动循迹;控制算法;PID;I基于光电传感器的自动循迹智能车系统设计ABSTRACTThe design of autoguiding smartcar system based onphotoelectric sensorN ew generation automobile development and researched focus on information technology, microelectronic technology, computer technology, intelligent automation technology, artificial intelligence technology, networking technology, communication technology and so on. The intelligent automobile is the direction in which the modern automobile developed.The university students intelligence vehicle competition is a practice platform in which intelligence automobile designed , we use the photoelectric sensor as gathering sensor to take path information , The microcontroller is used as the control system core ,and process the signal, and controls car to run . signal-chip microcomputer MC9S12 series be widespread utilized in the automobile electronic control domain. I use the Freescale microcontroller MC9S12XS128 to design the intelligent vehicle system. The design of intelligent vehicle system including hardware circuit and control software system. I adopt the software of electronics design Altium Designer to complete designing the hardware . Hardware circuit system mainly includes the freescale ’s Single-chip Microcomputer smallest system, the power source management system , the way recognition and the detecting system, the motor-driven system. But the control software system mainly includes Single-chip Microcomputer 's initialization, the PID control algorithm, the way recognition algorithm, the steering engine control algorithm, the speed control algorithm . It uses Freescale Corporation's Codewarrior as the software development ,the simulation and downloading…s platform in the software designing . Finally The design of auto track smartcar system based on photoelectric sensor is completed.Key words: Intelligent vehicle; photoelectric Sensor; auto track; Control algorithm ;PID;II摘要 (I)ABSTRACT ........................................................................................................................ I I 插图清单 (I)第1章绪论................................................................................................................. - 1 -1.1 毕业设计(论文)内容及研究意义(价值)............................................. - 1 -1.2 毕业设计(论文)研究现状和发展趋势..................................................... - 2 -第2章控制系统整体方案设计................................................................................... - 3 -2.1 整体设计方案概述........................................................................................... - 3 -2.2 控制系统整体方案设计................................................................................. - 4 -2.2.1 模型车硬件整体方案设计...................................................................... - 4 -2.2.2 系统软件模块分析 ................................................................................. - 7 -2.2.3 控制算法设计方案 ................................................................................. - 8 -第3章单片机最小系统模块....................................................................................... - 9 -3.1 单片机以及最小系统简介............................................................................... - 9 -3.2 MC9S12XS128最小系统设计 ...................................................................... - 9 - 第4章电源管理模块................................................................................................. - 11 -第5章路径识别模块和测速检测模块..................................................................... - 13 -5.1 路径识别模块................................................................................................. - 13 -5.1.1 光电传感器 ........................................................................................... - 13 -5.1.2 光电传感器发射与接收电路设计 ....................................................... - 13 -5.1.3 路径识别传感器布局设计 ................................................................... - 14 -5.2 测速检测模块 .......................................................................................... - 16 -第6章电机驱动模块................................................................................................. - 19 -6.1 直流电机驱动模块......................................................................................... - 19 -6.1.1 电机的工作原理 ................................................................................... - 19 -6.1.2 MC33886介绍....................................................................................... - 21 -6.1.3 PWM信号控制电机的转速.................................................................. - 22 -6.2 舵机驱动模块............................................................................................... - 23 -第7章智能车软件的设计......................................................................................... - 29 -7.1 单片机初始化................................................................................................. - 30 -7.2 PID控制算法 ............................................................................................... - 32 -7.3 路径识别算法............................................................................................... - 34 -7.4 舵机控制算法............................................................................................... - 34 -7.5 速度控制算法............................................................................................... - 36 -I基于光电传感器的自动循迹智能车系统设计第8章开发制作与调试............................................................................................. - 38 -8.1 CodewarriorV4.7软件及其应用.................................................................. - 38 -8.2 BDM for S12的使用.................................................................................... - 43 -结论和展望................................................................................................................... - 44 - 致谢........................................................................................................................... - 45 - 参考文献....................................................................................................................... - 46 - 主要参考文献摘要....................................................................................................... - 48 - 附录A ........................................................................................................................... - 50 -II插图清单图2-1 系统信息的控制流程图....................................... - 4 - 图2-2 智能车控制系统整体结构图................................... - 5 - 图2-3 系统硬件结构图............................................. - 6 - 图2-4 系统软件结构............................................... - 7 - 图3-1 最小系统原理图和PCB图.................................... - 10 - 图4-1 电源系统结构框图.......................................... - 11 - 图4-2 LM7805电路图.............................................. - 12 - 图4-3 LM7806电路图.............................................. - 12 - 图5-1 光电传感器的基本组成...................................... - 13 - 图5-2 单对红外传感器电路图...................................... - 14 - 图5-3 红外探测布局的PCB图...................................... - 16 - 图5-4 霍尔原理.................................................. - 17 - 图5-5 霍尔测速电路图............................................ - 18 - 图6-1 H桥式电机驱动电路......................................... - 20 - 图6-2 H桥电路驱动电机顺时针转动................................. - 20 - 图6-3 H桥电路驱动电机逆时针转动................................. - 21 - 图6-4 MC33886电机驱动原理图..................................... - 22 - 图6-5 舵机工作原理示意图........................................ - 24 - 图6-6 舵机输出转角与控制信号脉宽之间关系........................ - 25 - 图6-7 不同占空比的PWM波形控制的转向伺服电机状态图.............. - 26 - 图6-8 转向伺服电机控制方法图.................................... - 27 - 图6-9 舵机转角控制模块程序流程图................................ - 28 - 图7-1 光电传感器方案主程序流程图................................ - 29 - 图7-2 典型PID控制结构.......................................... - 33 - 图7-3 舵机控制流程图............................................ - 35 - 图7-4 速度控制流程图............................................ - 37 - 图8-1 CodearrierV4.7 创建新的工程窗口........................... - 40 - 图8-2 CodearrierV4.7的工程的初始设置窗口........................ - 41 - 图8-3 CodearrierV4.7的编译窗口.................................. - 42 -图8-4 BDM的PCB原理图........................................... - 43 -I第1章绪论自动循迹智能车是一个集环境感知、规划决策、自动驾驶等多种功能于一体的综合系统。
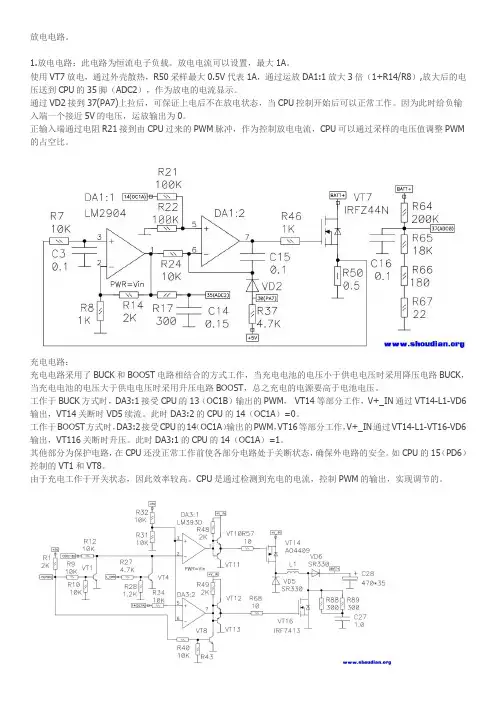
放电电路。
1.放电电路:此电路为恒流电子负载。
放电电流可以设置,最大1A。
使用VT7放电,通过外壳散热,R50采样最大0.5V代表1A,通过运放DA1:1放大3倍(1+R14/R8),放大后的电压送到CPU的35脚(ADC2),作为放电的电流显示。
通过VD2接到37(PA7)上拉后,可保证上电后不在放电状态,当CPU控制开始后可以正常工作。
因为此时给负输入端一个接近5V的电压,运放输出为0。
正输入端通过电阻R21接到由CPU过来的PWM脉冲,作为控制放电电流,CPU可以通过采样的电压值调整PWM 的占空比。
充电电路:充电电路采用了BUCK和BOOST电路相结合的方式工作,当充电电池的电压小于供电电压时采用降压电路BUCK,当充电电池的电压大于供电电压时采用升压电路BOOST,总之充电的电源要高于电池电压。
工作于BUCK方式时,DA3:1接受CPU的13(OC1B)输出的PWM,VT14等部分工作,V+_IN通过VT14-L1-VD6输出,VT14关断时VD5续流。
此时DA3:2的CPU的14(OC1A)=0。
工作于BOOST方式时,DA3:2接受CPU的14(OC1A)输出的PWM,VT16等部分工作,V+_IN通过VT14-L1-VT16-VD6输出,VT116关断时升压。
此时DA3:1的CPU的14(OC1A)=1。
其他部分为保护电路,在CPU还没正常工作前使各部分电路处于关断状态,确保外电路的安全。
如CPU的15(PD6)控制的VT1和VT8。
由于充电工作于开关状态,因此效率较高。
CPU是通过检测到充电的电流,控制PWM的输出,实现调节的。
充电电流检测电路:采样电阻0.05欧姆,最大电流6A。
运放DA2:1放大倍数为1+10/1.5=7.7倍,最大输出电压为0.05*6*7.7=2.3V。
CPU的参考电压为2.5V,由TL431产生。
检测的电流变换成电压后接近参考电压,可以提高AD转换的精度。
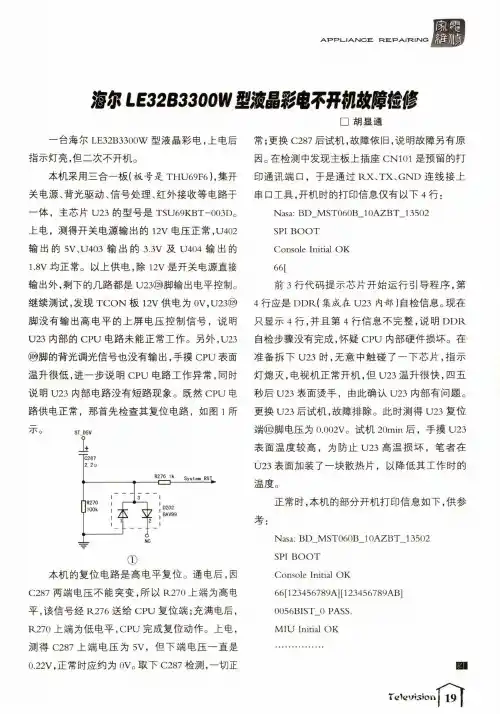
A P P i-I A T S J C E T R E P A IT R IT S IG海尔LE32B3300W型液晶彩电不孖执故障检修□胡显通一台海尔LE32B3300W型液晶彩电,上电后 指示灯亮,但二次不开机。
本机采用三合一板(板号是T H U69F6 ),集开 关电源、背光驱动、信号处理、红外接收等电路于 —体,主芯片U23的型号是TSU69KBT-003D。
上电,测得开关电源输出的12V电压正常,U402常;更换C287后试机,故障依旧,说明故障另有原 因。
在检测中发现主板上插座C N101是预留的打 印通讯端口,于是通过R X、T X、G N D连线接上 串口工具,开机时的打印信息仅有以下4行:N a s a:BD_MST060B_10AZBT_13502S P I BOOT输出的 5V、U403 输出的 3.3V 及 U404 输出的 C o n s o l e I n i t i a l OK1.8V均正常。
以上供电,除12V是开关电源直接 输出外,剩下的几路都是U23@脚输出电平控制。
继续测试,发现T C O N板12V供电为0V,U23@脚没有输出高电平的上屏电压控制信号,说明 U23内部的C P U电路未能正常工作。
另外,U23 @脚的背光调光信号也没有输出,手摸C P U表面 温升很低,进一步说明C P U电路工作异常,同时 说明U23内部电路没有短路现象。
既然C P U电路供电正常,那首先检查其复位电路,如图1所不。
①本机的复位电路是高电平复位。
通电后,因C287两端电压不能突变,所以R270上端为高电 平,该信号经R276送给C P U复位端;充满电后, R270上端为低电平,C P U完成复位动作。
上电,测得C287上端电压为5V,但下端电压一直是0.22V,正常时应约为0V。
取下C287检测,一切正66[前3行代码提示芯片开始运行引导程序,第 4行应是D D R(集成在U23内部)自检信息。
蓝牙模块BTM-01
DATASHEET
北京博讯科技有限公司
2008.07
型号:BTM-01贴片式蓝牙模块
1、产品概述
BTM-01蓝牙模块,设计采用了CSR公司的AUDIO–FLASH蓝牙芯片,附加Atmel公司T7024蓝牙专用前端芯片,扩展成标准的1级蓝牙模块(Class1),通讯距离达到100米,外围主要元器件选型采用工业级标准,模块电路板为0.8mm四层板,采
用激光盲孔加工工艺,引脚采用半孔加工工艺,贴片式设计,体积尺寸紧凑,最适合工业数据、语音传输。
是高质量的蓝牙模块。
电路接口:
USB口、RS232串行口(TTL电平)、Audio模拟语音接口(SPK,MIC),SPI编程口,2路AIO模拟量接口,7路数字PIO 接口
主要性能:
频段:2.40GHz—2.48GHz,ISM Band
蓝牙协议:BlueTooth V1.2
功率等级:Class1(+20dBm)
接收灵敏度:-85dBm
操作电压:2.7V~3.3V
工作温度:-40℃至+105℃
参考功耗:待机0~6mA
数据通信约100mA
语音通讯约120mA
典型应用:
串口数据传输,最大波特率1.3Mbps,工业级无线数据采集,一对一自动建链,透明串口;上传数据至PC、笔记本、PDA、智能手机等。
蓝牙语音传输,模块与模块蓝牙对讲,模块与普通蓝牙耳机通讯,模块做为蓝牙耳机使用等。
蓝牙遥控,利用数字PIO实现远程无线遥控。
车载蓝牙、GPS蓝牙、蓝牙语音网关、用户可自行开发各种蓝牙应用。
BTM-01蓝牙模块
硬件框图。
2 基于MAX706的单片UP监控电路随着新器件的出现,电路的简化成为可能,而且性能稳定、功能齐全。
目前,微机控制系统中越来越广泛地应用单片UP监控电路。
如MAXIM公司的MAX706芯片,使用起来就很方便。
MAX706简化了图3的设计,减少了器件个数,所构成的电路性能更可靠。
MAX706提供如下四种功能:(1)上电、掉电以及降压情况下的复位输出。
(2)独立的看门狗输出。
如果在1.6s内看门狗输入端未被触发,看门狗输出将变为低电平。
(3)1.25门限检测器,用于电源故障报警、低电池检测或+5V以外的电源的监控。
(4)低电平有效的人工复位输出。
MAX706在电源电压低于4.40V的情况下产生复位脉冲,此器件有8脚的DIP和SO两种封装形式,管脚如图4。
图5是一种以MAX706为核心的复位电路。
这个复位电路具有上电掉电及降压复位功能和看门狗功能。
上电掉电复位功能由芯片本身提供,而看门狗功能则由该电路保证。
在程序执行中,保证在1.6s内PX.X发出一负脉冲,在正常运行时,RESET信号不会有铲。
如果程序跳飞盲目运行,那么1.6s内没有负脉冲,RESET信号有效。
3 一种高可靠的复位电路以MAX706为核心的复位电路在实现应用中具很高的可靠性,目前得到了广泛的应用。
但在一些特殊场合,如强干扰环境中,此电路不能可靠工作而需要改进,笔者在研制80kV绝缘油耐压测试仪中遇到此问题。
在测试过程中,需要有一个可调的高压电压,该电压加在绝缘油杯两端,电压从零逐步上升,当油在任意时刻击穿时,当前电压值即为油的绝缘值。
该耐压测试仪由图6所示的几个主要部分组成。
系统核心是AT89C51,高压产生电路的工作过程是由CPU控制的步进电机带动自耦变压器产生0~220V交流电压,然后交流电压经1:400变化的高压变化器产生0-88kV的高压。
当绝缘油在任意时刻击穿时,高压切断。
此时,由高压采集电路采集并记录前击穿电压值。
经LCD液晶屏显示结果。
电池备份电源供电自动切换及充电电路
电池在主电源失去时,对单片机的继续运行提供能源,此时的电池能源是非常宝贵的,往往都是以“uA”级进行计算。
而且还有一个不能避免的结果,就是随着保护时间的延长,电池的电量也会用完的。
所以,保护电路有一个最长保护时间的参数,使用中不能超过,否则,保护就会失效。
当电池经过保护时间的使用之后,就需要补充电能,以便下一次保护时能够“酒足饭饱”地投入保护工作。
所以,又有一个如何给电池充电的问题。
归纳一下:就是电池在主电源正常供电时,需要由主电源对其进行充电;当主电源失去一时,又由电池放电以保持单片机系统的运行。
下面就是一个标准的掉电保护电路。
(VCC = 6V
当主电源正常时,单片机由VCC5V电源供电,此时,VCC5V 电源通过D1 和R1 ,对保护用电池进行充电,以保证电池电量的充足。
适当选择R1 的大小,可以保证充电电流和充电时间都比较合理。
例如:需要对3V6 * 60mAH 的电池充电,充电时间选择在8 小时左右,我们就选择充电电流为8 mA,R1 =(6V - 0.6)/ 8(0.6 是串连二极管的导通压降)。
与电池并联的稳压二极管是防止电池过充电用的。
放电路径是:电池通过R1 R2 ,对单片机供电端口进行供电,供电电流通过R1 R2 之后,会有压降,到达单片机的VCC端口时,电压就会比3V6 低,一般会在
2V--2V5左右,不要企图在这个时候提高单片机的供电电压,这样反而会适得其反,令单片机仍然工作于正常供电状态。
对各单片机生产公司的各种单片机,这个低供电电压会有某些差别,调整电阻R2,在保证单片机能够保持运行的情况下,耗用电流越小越好。
adm706工作原理
ADM706是一种具有监控和复位功能的电源监控集成电路。
它通过监测电源电压来实现电源控制和系统保护。
ADM706的工作原理如下:
1. 电源电压监测:ADM706会监测主供电电源的电压水平。
当电源电压低于特定的阈值(通常为3.08V),ADM706会检
测到低电压状态。
2. 复位信号输出:当ADM706检测到主供电电压低于阈值时,它会将复位引脚拉低,向系统发送一个复位信号。
这个复位信号可以用来重置系统中的各个电路和逻辑元件,以确保系统在电源电压恢复到正常水平时重新正确工作。
3. 复位延迟:ADM706还具有一个复位延迟功能。
当电源电
压恢复到正常水平后,复位信号将保持在低电平状态一段时间(通常为200ms到500ms),以确保系统完全重启和稳定。
4. 压力监控:ADM706还具有压力监控功能。
当主供电电源
的电压超过特定的阈值(通常为4.625V),ADM706会检测
到高电压状态,并发送一个压力报警信号。
总的来说,ADM706通过检测电源电压并输出相应的复位信
号来监控电源状态,并保护系统不受异常电压的影响。
这种集成电路广泛应用于各种电子设备中,以提高系统的可靠性和稳定性。
利用µP 复位电路断开Vcc 电源
1 利用µP 复位电路断开Vcc 电源
美信集成产品公司北京办事处 周学庆
微处理器复位电路可提供上电/掉电复位,某些器件还提供“看门狗”计时器,当软件陷入死循环时,触发一复位脉冲重新启动µP 。
图1所示的电路不仅具有上述功能,还能够彻底关断Vcc 电源,使系统由于线扰、静电及其它原因引起数字IC 闭锁时重新恢复。
P 沟道MOSFET (Q 1)和相应的外部元件可使典型的µP 复位电路在电压跌落或软件失
效情况下关闭V CC 。
该电路同时具有上电复位功能(图2)。
上电时,当V CC IN 端超过IC 内部复位门限4.65V 时,WDO 升高并经R3向C2充电,大约经过600ms 恢复闭锁,PFI 端(4脚)电压达到2.5V 时,PFO 为高电平。
Q2开启Q 1,重新置位V CC ,同时MR 拉高,经过内部200ms 的延迟重新启动µP 。
D2和上拉电阻R6用来防止IC 1向V CC 倒灌电流,并非所有应用都需如此。
时序图说明了电压跌落或软件失效(WDI 端发生有效数据丢失)时的电路响应。
上述两种情况下,WDO 变为低电平且C2放电。
然后PFO 输出逻辑低电平,断开V CC 并将MR 拉低。
MR 低电平将WDO 重新复位,使C2重新充电并经过大约500ms 的延迟后恢复V CC 。
再经过大约200ms 后RESET 变高。
如果系统存在持续闭锁,如重载下大电流将V CC 拉至低于IC 的复位门限,该电路将初始化另一个电源/复位时序。
C 1的值必须保证当Q 1导通时,V CC 的输入不低于复位门限太多,可通过增大C2来延长电源的关断时间。
图1。
当电压跌落,软件失效或上电情况,该复位电路中断电源并产生微处理器复位
图2图1 µP 复位电路的时序。