双眼视觉Binocular Vision.ppt
- 格式:ppt
- 大小:2.43 MB
- 文档页数:44


第十章双眼视觉检测(binocular vision)综合验光仪尚可对被测眼的双眼影象不等、双眼同时视、双眼融合和双眼立体视等双眼视觉功能进行定性或定量检测,并利用双眼视觉检测的结果为屈光检查服务。
通常用于检测被测眼双眼视觉功能的基础情况,预测屈光检查中可能遇到的问题;也可以在被测眼投放适当的球柱镜联合试片组合后进行双眼视觉功能检测,分析屈光检查结果是否支持被测双眼视觉功能。
一、双眼视觉的生理1.影象不等(1)概述同一固视目标在双眼的视网膜上形成大小不等或形状不同的目标象称为影象不等。
正常情况下,双眼在看远时,由于观察目标的角度不同普遍存在大约0.25%的影象视差。
随着目标的移近,由于集合的作用,影象视差会逐步增大,甚至达到1%或更大,但这种影象上的差异不会对双眼视觉功能产生任何干扰,故称为生理性影象不等,生理性影象不等是立体视(深度觉)的基础。
事实上,影象不等超过1%,通过视──知觉的可塑性补偿,仍能维持较好的双眼视觉功能,双眼对影象不等的耐受限度约为5%,这一水平的影象不等称为代偿性影象不等,代偿性影象不等可诱发程度不同的临床症状。
当双眼影象视差超过5%时,则发生双眼视觉功能障碍,称为病理性影象不等。
在儿童期由于双眼视觉功能尚未发育成熟,为避免复视的干扰,中枢可对视觉较差的眼进行抑制,即在双眼同时注视时,视觉较差的眼不参与工作,久之可发生弱视及斜视。
成年人双眼视觉功能已发育成熟,发生双眼影象不等,则可能酿成双眼复视。
(2)病因光学原因的影象不等最为常见,如双眼屈光参差达到2.50D以上,戴矫正眼镜后,即可产生5%以上的影象不等,此外见于双眼的眼镜透镜的形状不同、厚度不同、放置的位置不同或双眼柱镜的轴位不对称以及白内障摘除后的无晶体状态等。
解剖上的原因也不容忽视,如双眼轴长差异,双眼结点至视网膜的距离差异,双眼视细胞的密度差异,双眼视细胞对光信号的感知差异等因素均足以导致双眼的影象不等。
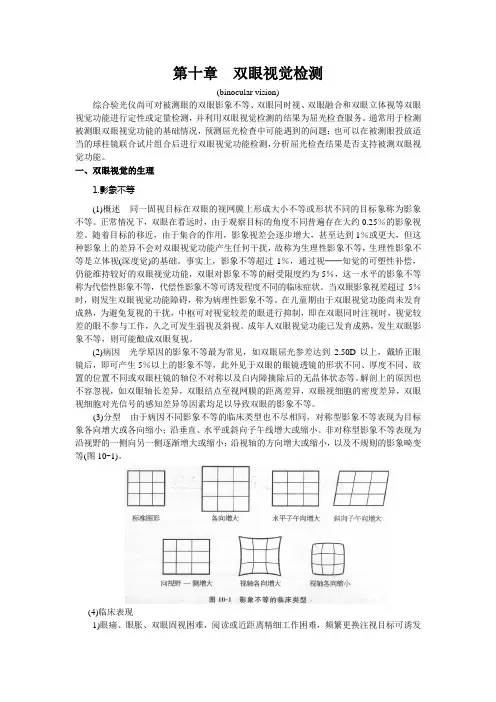
(3)分型由于病因不同影象不等的临床类型也不尽相同,对称型影象不等表现为目标象各向增大或各向缩小;沿垂直、水平或斜向子午线增大或缩小。