城轨车辆障碍物检测装置分析
- 格式:docx
- 大小:29.14 KB
- 文档页数:3
城市轨道交通车辆主动障碍物检测系统技计算公式、检验内容及功能试验方法嘿,咱今儿来聊聊城市轨道交通车辆主动障碍物检测系统这档子事儿哈!你说这系统多重要啊,就像咱开车时的眼睛一样,得时刻帮咱盯着前面有没有啥障碍物。
先来说说这计算公式吧,那可真是有讲究嘞!它就像是一个神奇的魔法公式,通过各种参数的运算,能精确地算出障碍物的情况。
你想想,要是没有这个公式,那检测系统不就成了瞎猫碰死耗子啦?比如说通过传感器获取的距离、速度等数据,经过一番复杂的运算,就能得出障碍物的大致信息啦。
这就好比咱做饭,各种调料按照一定比例放进去,才能做出美味的菜肴嘛!再讲讲这检验内容。
这可不能马虎呀!得仔细检查系统的各个零部件是不是都正常工作,就像咱体检一样,从头到脚都得检查个遍。
传感器灵不灵啦,数据分析准不准啦,这些都得好好把关。
要是有个小毛病没发现,那到时候出问题可就麻烦大咯!就好比一辆车,要是轮胎有问题没发现,在路上跑着跑着爆胎了,那多危险呀!然后就是功能试验方法啦。
这就像是给系统来一场考试,看看它到底能不能通过考验。
可以模拟各种场景,放上不同的障碍物,看看系统能不能准确检测到并及时发出警报。
这就跟咱上学时做练习题一样,多做几遍,熟练了,到真正考试的时候才不会慌嘛。
城市轨道交通车辆主动障碍物检测系统,那可是保障乘客安全的重要防线啊!要是它出了问题,后果不堪设想。
所以呀,对于这个系统的计算公式、检验内容和功能试验方法,那都得重视起来,不能有丝毫的马虎。
咱得清楚,这可不是闹着玩的事儿。
想想每天有那么多人乘坐城市轨道交通,如果检测系统不靠谱,那不是把大家的生命安全当儿戏嘛!所以呀,相关的工作人员可得好好钻研这些东西,把好关,让咱老百姓坐得安心、坐得放心。
总之,城市轨道交通车辆主动障碍物检测系统技计算公式、检验内容及功能试验方法,每一个环节都至关重要,都得认真对待,不能有一丝懈怠呀!这可是关系到大家出行安全的大事儿呢!大家说是不是这个理儿呀!。

浅谈轨道工程列车前视障碍物智能检测系统发展状况摘要:地铁工程列车全自动运行系统是城市轨道交通发展的趋势,它通过整合计算机系统、通信系统、信号分析系统和列车控制系统等技术实现地铁工程列车运行的自动化。
将工程列车升级到全自动运行后,设备和功能要求更高。
因此,必须采取措施降低工程列车运行风险,提高运行可靠性。
障碍物检测系统有助于防止严重事故发生。
障碍物检测系统分为被动和主动的障碍物检测。
被动障碍物检测是通过内置系统进行的,传感器信号被触发并传输到工程列车上,以实现工程列车的紧急制动。
主动检测障碍物时,通过列车前端传感器收集前端数据,当检测系统检测到障碍物时,可以向工程列车控制系统发送警告信号,并进行紧急制动处理。
关键词:轨道交通;障碍物;智能检测引言城市轨道交通全自动运行系统是工程列车运行控制系统发展的方向。
对设备和功能的需求从人控提升为列车的全自动运行。
前端障碍物的检测可减少列车与侵限障碍物发生碰撞的风险,避免重大事故。
障碍物检测系统应检测列车前方任何侵入运行限界的障碍物。
被动列车障碍物检测设备通过机械系统进行障碍物识别,触发传感器信号并传输到电气系统,电气系统控制列车采取紧急制动。
主动列车障碍物检测系统利用列车前端采集系统,通过传感器(激光雷达、超声波、红外和可视雷达)采集列车前端的情况,当检测到影响列车运行安全存在前方障碍物时,系统可以及时发出警告信号,必要时紧急制动。
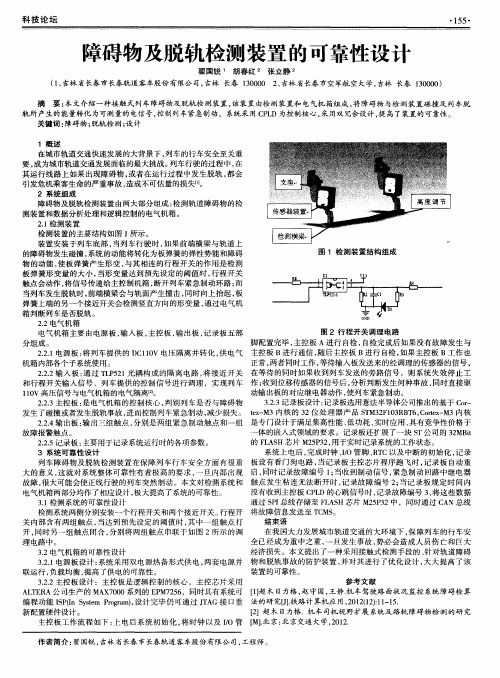
1障碍物识别该系统配置了两个传感器:激光传感器和视觉传感器。
计算机分析系统使目标检测和敏感数据处理成为可能。
可视化数据通过算法处理形成特定的映像数据,利用预制的映像数据库将形成映像的特征与数据库内的数据进行对比,从而得出结果,也可以配置网络数据库进行数据分析和存储,在计算未记录映像时用于更新。
该系统能够识别列车、人、信号灯、侵限物体等。
2国内应用现状目前,国内主动障碍物的检测系统主要依靠外国制造商的技术,产品是通过国内代理人组装的。

轨道公务车的障碍物检测与防撞技术随着城市化的快速推进,城市交通拥堵问题日益突出。
作为解决交通问题的有效手段,轨道交通系统在全球范围内得到了广泛应用和发展。
然而,在轨道交通系统中,公务车是必不可少的一部分,其安全性尤为关键。
为了提高轨道公务车的行驶安全性能,障碍物检测与防撞技术成为不可忽视的重要因素。
一、障碍物检测技术的应用1. 摄像头与图像处理技术在轨道公务车上安装高清摄像头,并配合先进的图像处理技术,能够实时监测周围环境并准确识别障碍物。
通过实时传输图像数据至车辆控制中心,驾驶员可以清晰地看到车辆前方的情况,及时采取必要的驾驶措施以避免碰撞。
2. 距离传感器技术利用超声波、红外线或激光等距离传感器技术,可以测量与车辆周围物体的距离,以及物体的形状和大小。
这些传感器可以有效地检测到车辆前方的障碍物,同时还可以通过声音或视觉提示驾驶员避免碰撞。
二、防撞技术的应用1. 紧急制动系统公务车可以配备紧急制动系统,当检测到障碍物距离过近时,系统会迅速刹车,为驾驶员提供更多的反应时间,并有效减少碰撞风险。
紧急制动系统利用电子控制单元(ECU)与传感器进行实时通信,快速响应障碍物检测结果,保证车辆安全。
2. 声光警示装置为了提高驾驶员对障碍物的警觉性,轨道公务车上可以安装声光警示装置。
当检测到危险情况时,装置会发出警示声音和闪烁的灯光,提醒驾驶员及时采取避让动作,避免发生碰撞事故。
这种装置不仅可以在视觉上提醒驾驶员,还可以通过声音传达信息,提高反应速度。
三、技术发展趋势随着科技的不断进步和创新,轨道公务车的障碍物检测与防撞技术也将得到进一步发展和完善。
1. 人工智能技术未来,轨道公务车的障碍物检测与防撞技术可能借助人工智能技术的发展而得到进一步提升。
通过分析大量的图像和数据,人工智能系统可以更加准确地判断障碍物类型和位置,从而提供更智能的驾驶辅助决策,确保车辆的安全行驶。
2. 雷达和激光技术雷达和激光技术在障碍物检测与防撞领域也有着很大的潜力。

城轨车辆障碍物检测装置分析技术与应用TECHNOLOGY AND APPLICATION城轨车辆障碍物检测装置分析◎ 徐首章随着我国轨道交通事业迅速发展,轨道列车障碍物检测方法近年来也成为研究热点。
尤其是地铁无人驾驶技术的快速发展,更加促进许多新技术在障碍物检测系统上的应用。
本文针对目前主流应用的障碍物检测装置进行介绍,对障碍物检测系统的特征、方式、技术参数等做详细分析。
2011年上海地铁10号线列车运营过程中由于信号系统故障,列车切除ATP通过人工驾驶,采用电话闭塞方式列车限速运行。
期间14:51分列车豫园至老西门下行区间以35Km/h的速度发生追尾,事故造成271人受伤。
不仅如此,国内地铁车辆与车辆段库门碰撞事故、与线路终点止挡碰撞事故及轨道上障碍物的碰撞事故也屡见不鲜。
人工驾驶容易受到工作状态、危险识别能力、个人经验等主观因素的影响,同时弯道、坡道、照明等线路环境也会对人工驾驶造成一定影响,从而引起安全风险。
因此城轨车辆的障碍物检测装置成为当务之急。
在无人驾驶方面,根据自动运行城市轨道交通(AUGT)标准IEC 62267的第8.5.5章节车载障碍物检测装置的规定,障碍物检测装置最迟在列车前方障碍物与该装置接触时进行探测,如发现障碍物,列车应立即施加紧急制动。
同时标准中要求,发现障碍物时,应向OCC (中央控制中心)报告信息,并且只有在危险条件得到解决后才能恢复运行。
目前国内外轨道车辆的障碍物检测装置主要分为接触式和非接触式两大类。
国内现状分析国内首条自主研发的全自动运行地铁线路北京燕房线采用的是接触式障碍物与脱轨检测装置,通过安装于列车转向架位置的检测装置,检测轨道附近障碍物,并将威胁程度不大的障碍物清出轨道,对于威胁程度较大的障碍物,通过碰撞来触发紧急制动信号,从而保障行车安全。
国内某些科技公司自主开发的接触式障碍物与脱轨检测装置,检测装置同样安装于转向架前方,当轨道上的障碍物撞击到检测横梁或列车脱轨钢轨撞击到检测横梁时,会使检测弹簧发生大的变形从而触发行程开关动作,串联到列车紧急制动回路里的行程开关使列车产生紧急制动停车,同时通过不同的行程开关的动作向列车TCMS 上报事件(是障碍物还是脱轨)信息,此种方式将障碍物检测与脱轨检测集成控制,提高车辆的安全性能。

障碍物探测系统原理及在轨道交通行业的应用发布时间:2023-02-24T05:22:50.584Z 来源:《中国科技信息》2022年10月19期作者:夏正宝谢建新[导读] 随着我国城市轨道交通的大发展。
城市轨道交通作为载客量大夏正宝谢建新中车浦镇阿尔斯通运输系统有限公司安徽芜湖 241000摘要:随着我国城市轨道交通的大发展。
城市轨道交通作为载客量大、运营环境相对封闭的公共交通系统,在解决日益严重的城市交通拥堵问题时其运营安全也更加受到重视,轨道障碍物探测系统是保证车辆运行安全的重要措施。
本文介绍了轨道交通行业种主动式与被动式障碍物探测主要的工作原理。
根据实例详细描述了APM、跨座式单轨以及地铁车辆中障碍物探测的设计方案。
并对轨道交通这三种车型的障碍物探测方案优缺点进行分析。
关键词:自动旅客捷运系统(APM)列车控制管理系统(TCMS)Abstract: With the great development of urban rail transit in China. As a public transportation system with large passenger capacity and relatively closed operating environment, the operation safety of urban rail transit is also paid more attention when solving the increasingly serious problem of urban traffic congestion. The track obstacle detection system is an important measure to ensure the safety of vehicle operation. This paper introduces the main working principles of active and passive obstacle detection in rail transit industry. The design schemes of obstacle detection in APM, straddle monorail and subway vehicles are described in detail. The advantages and disadvantages of obstacle detection schemes for these three types of rail transit are analyzed.Key words: Automatic Passenger Rapid Transit System (APM) Train Control Management System (TCMS)1.引言随着我国人口向中心城市聚集的趋势越来越明显,城市对轨道交通的需求也越发迫切。
城市轨道交通障碍物探测系统优化方案城市轨道交通障碍物探测系统优化方案随着城市轨道交通的不断发展,障碍物探测系统的优化变得越来越重要。
这一系统可以帮助轨道交通运营方更好地管理和维护线路,确保乘客的安全。
下面是一份关于城市轨道交通障碍物探测系统优化方案的逐步思路:第一步:需求分析首先,我们需要对城市轨道交通障碍物探测系统的需求进行充分的分析。
这包括了解运营方的要求、系统的功能和性能需求、以及目前系统存在的问题和瓶颈。
通过对需求的准确分析,我们可以为接下来的方案设计提供指导。
第二步:技术研究在明确需求后,我们需要进行技术研究,寻找适用于障碍物探测的先进技术。
这包括对传感器技术、数据处理算法和通信技术等方面的研究。
通过对各种技术的对比和评估,我们可以选择最合适的技术方案。
第三步:系统设计在技术研究的基础上,我们可以开始进行系统设计。
系统设计包括硬件设备的选择和布局,以及软件系统的架构设计。
在设计过程中,我们需要考虑系统的可靠性、实时性和可扩展性等因素,确保系统能够满足运营方的需求。
第四步:系统开发系统设计完成后,我们进入系统开发阶段。
这包括硬件设备的制造和安装,以及软件系统的开发和调试。
在开发过程中,我们需要进行系统的集成测试和性能测试,确保系统能够正常运行并满足预期的性能指标。
第五步:系统部署系统开发完成后,我们需要将系统部署到实际的轨道交通线路中。
这包括系统的安装、调试和培训等工作。
在部署过程中,我们需要与运营方密切合作,确保系统能够顺利地投入使用。
第六步:系统运维系统部署完成后,并不意味着任务的结束。
随着城市轨道交通的不断发展,系统还需要进行定期的维护和升级。
这包括系统的故障排除、性能优化和功能扩展等工作。
通过有效的运维,我们可以确保系统始终保持良好的工作状态。
综上所述,优化城市轨道交通障碍物探测系统是一个复杂而重要的任务,需要逐步思考和系统的方案设计。
通过详细的需求分析、技术研究、系统设计、系统开发、系统部署和系统运维等步骤,我们可以为城市轨道交通运营方提供更安全、高效的服务。
地铁车辆障碍物探测装置防脱结构的应用摘要:随着地铁车辆的技术发展,国内一些城市逐渐使用无人驾驶,提高运行效率,障碍物探测装置逐渐广泛应用于车辆中,用于在车辆正常行驶中排除在轨道上出现的障碍物,并通过传感器执行紧急制动,但这类探测器多数为悬臂结构,一旦脱落可能造成重大事故,因此必要的防脱结构可以有效避免这类问题的发生。
关键词:障碍物探测;防脱结构;有轨车辆1.概述目前国内地铁列车节本都采用有人驾驶的运行方式,由司机操作列车并负责观察列车行进方向确保无障碍物掉落轨道,但随着地铁车辆的技术发展,国内一些城市逐渐使用无人驾驶,提高运行效率,障碍物探测装置逐渐广泛应用于车辆中,用于在车辆正常行驶中排除在轨道上出现的障碍物,并通过传感器执行紧急制动;目前比较可靠的方式是在车头车体转向架构架前端安装一个基于机械触发原理的障碍物检测系统,在列车高速运行中撞到障碍物后触发车头下方安装的机械行程撞针运动,进而触发继电器开关电路,使列车紧急停车。
1.现有技术的技术方案此类障碍物检测系统由连接箱,下部横梁构成,总重量达到44Kg;连接箱固定通过螺栓固定于转向架构架前端,内部为机械撞针,连接板,及传感器,通过撞针运动触发传感器,使车辆紧急停车;箱内连接板固定下部横梁,通过下部横梁撞击联动箱内撞针运动。
如图1所示:1—转向架 2—构架连接件 3—连接箱 4—横梁图1 障碍物探测器安装结构1.现有技术的缺点此结构安为悬臂结构,仅通过螺栓连接固定在转向架构架上,设备重量大,体积大,经过长时间运行振动或有障碍物排障撞击动作后,可能导致螺栓松动,安装结构疲劳,造成整个障碍物探测装置脱落,而装置安装于转向架轮对前端,一旦脱落,掉落在运行方向轮对前端,轻则造成底架设备损坏,重则造成车辆脱轨的重大安全事故。
1.防脱结构在车辆上的安装应用障碍物探测器安装于转向架构架,通过构架连接件固定连接箱,将整个障碍物探测器系统吊挂于转向架。
如图2所示,增加防脱绳安装结构,防脱绳采用直径15mm的圆形编织线,柔韧性强且强度高,防脱绳一端安装于构架连接件,通过M8螺栓固定,并采用自锁螺母防止松脱;另一端固定于连接箱内的连接杆,且防脱绳不能过长,防止脱落后摆动过大。
城市轨道交通车辆主动障碍物检测系统技术要求城市轨道交通车辆主动障碍物检测系统是一种非常重要的安全保障装置,它可以帮助车辆及时发现并避免与障碍物发生碰撞。
为了确保该系统能够高效运行,以下是一些技术要求:一、高精度的障碍物检测城市轨道交通车辆主动障碍物检测系统需要能够准确地检测各种类型的障碍物,包括路面障碍物、行人、其他车辆等。
系统应当能够实时识别这些障碍物并预测它们的移动轨迹,以便进行相应的避让行动。
二、快速的数据处理能力为了确保车辆能够及时采取行动进行避让,城市轨道交通车辆主动障碍物检测系统需要具备快速的数据处理能力。
它应当能够实时接收传感器采集的数据,并快速进行分析和处理,以确定障碍物的位置、速度等信息。
三、多种传感器融合为了提高障碍物检测的准确性和可靠性,城市轨道交通车辆主动障碍物检测系统需要采用多种传感器进行数据的融合。
例如,可以结合使用激光雷达、摄像头、超声波传感器等,以获取更全面和准确的障碍物信息。
四、适应不同天气条件城市轨道交通车辆主动障碍物检测系统需要能够适应不同的天气条件,包括阳光、雨雪、雾霾等。
系统应具备良好的防水和防尘性能,并且能够对各种天气条件下的传感器数据进行有效的处理和分析。
五、实时性和稳定性城市轨道交通车辆主动障碍物检测系统需要具备实时性和稳定性。
它应当能够在瞬息万变的城市道路环境中及时检测障碍物并做出相应的反应,以确保车辆的安全行驶。
六、自学习和更新能力城市轨道交通车辆主动障碍物检测系统应当具备自学习和更新能力。
通过不断收集和分析道路环境数据,系统可以不断学习和优化算法,提高障碍物检测的准确性和稳定性。
七、与车辆控制系统的集成为了实现车辆的主动避让行动,城市轨道交通车辆主动障碍物检测系统需要与车辆控制系统进行有效的集成。
它应当能够向车辆控制系统提供准确的障碍物信息,并与车辆控制系统实现快速而可靠的通信。
八、低功耗和高可靠性城市轨道交通车辆主动障碍物检测系统需要具备低功耗和高可靠性。
基于多技术融合的地铁列车障碍物检测系统设计分析探讨近年来,地铁成为人们出行的主要方式之一,但是地铁列车在行驶中往往会遇到各种障碍物,这些障碍物可能会对列车的安全行驶造成威胁。
因此,设计一套地铁列车障碍物检测系统至关重要。
传统的地铁列车障碍物检测系统主要依靠单一技术,容易受到外界环境的影响,检测准确性有限。
为了提高地铁列车的安全性能,本文基于多技术融合的思路,设计一套高效的地铁列车障碍物检测系统。
首先,本文将采用多种传感器技术进行障碍物检测。
例如,激光雷达可以实时扫描地铁车厢内外的环境,检测出潜在的障碍物;红外传感器可以检测车厢内的温度变化,发现异常情况;摄像头可以捕捉车厢内的图像,识别出潜在的障碍物。
通过多种传感器技术的融合,可以提高系统的检测准确性和全面性。
其次,本文将采用深度学习技术对传感器数据进行处理和分析。
传感器数据量庞大,深度学习技术可以有效地处理这些数据,提取出有用的信息。
通过训练深度学习模型,可以实现对障碍物的实时识别和定位。
同时,深度学习技术可以根据历史数据不断优化模型,提高系统的稳定性和准确性。
最后,本文将设计一个智能控制系统,实现对地铁列车的实时监控和控制。
当系统检测到有障碍物出现时,可以通过智能控制系统及时对列车进行干预,避免发生事故。
智能控制系统还可以通过与车辆通讯系统的集成,实现对列车其他系统的协调控制,进一步提高列车的安全性能。
综上所述,基于多技术融合的地铁列车障碍物检测系统,具有高效、准确和稳定的特点,可以有效提高地铁列车的安全性能,保障乘客的出行安全。
未来,随着物联网、人工智能等新技术的不断发展,地铁列车障碍物检测系统将进一步得到完善和升级,为地铁运输行业的发展注入新的动力。