四轴旋翼飞行器结构设计与模态分析_田卫军
- 格式:pdf
- 大小:2.56 MB
- 文档页数:3
四轴飞行器动力学分析与建模四轴飞行器主要由机架、动力系统、控制系统和传感器系统组成。
机架是整个飞行器的骨架,负责承载各个部件。
动力系统由四个电动马达和四个螺旋桨组成,电动马达通过转动螺旋桨产生升力和推力。
控制系统负责控制飞行器的飞行姿态以及飞行方向。
传感器系统用于获取飞行器的姿态和位置信息。
首先是力学分析。
在飞行过程中,四个螺旋桨产生的升力和推力需要平衡飞行器的重力。
根据牛顿第二定律,可以建立四轴飞行器的运动方程。
假设四轴飞行器在三维空间中的位置为(x, y, z),速度为(vx, vy, vz),质量为m。
则四轴飞行器所受到的合力可以表示为:F = mg - Tm是飞行器的质量,g是重力加速度,T是螺旋桨产生的合力。
根据牛顿第二定律,可以得到四轴飞行器的加速度方程为:a = (mg - T) / m其次是电机模型。
电机模型主要描述电动马达的输出特性。
通常情况下,电动马达的输出转矩与输入电流之间存在一定的关系。
可以使用简化的转矩模型来描述电动马达的输出。
假设电动马达的转矩为Tm,电流为I,转矩模型可以表示为:Tm=k1*I其中k1为电动马达的参数。
接下来是姿态稳定。
四轴飞行器的姿态稳定是实现飞行器平稳飞行的重要问题。
姿态稳定的关键在于对飞行器角度的控制。
通过使用陀螺仪、加速度计和磁力计等传感器获取飞行器的姿态信息,并通过控制系统对飞行器的姿态进行控制。
姿态稳定算法可以根据飞行器的姿态误差来计算所需的控制指令,进而控制飞行器的电动马达来实现姿态的调整。
最后是运动控制。
运动控制主要涉及到飞行器的位置和速度控制。
通常情况下,可以使用位置式控制和速度式控制来实现飞行器的运动控制。
在位置式控制中,通过计算飞行器的位置误差来产生相应的控制指令,控制飞行器的电动马达来实现位置的调整。
在速度式控制中,通过计算飞行器的速度误差来产生相应的控制指令,控制飞行器的电动马达来实现速度的调整。
综上所述,四轴飞行器的动力学分析与建模主要涉及到力学分析、电机模型、姿态稳定和运动控制等方面。
四旋翼飞行器结构1. 概述四旋翼飞行器是一种利用四个对称排列的旋翼进行垂直起飞、悬停和操纵的飞行器。
其优势包括垂直起降、悬停能力强、灵活机动、飞行稳定等。
在无人机领域中,四旋翼飞行器已经得到了广泛应用,如航拍摄影、应急救援、农业植保等。
2. 结构组成四旋翼飞行器的结构组成主要包括机身、四个旋翼、电池、控制系统等组件。
2.1 机身四旋翼飞行器的机身是整个飞行器的主体部分,起到支撑和连接其他组件的作用。
通常由轻质材料制成,如碳纤维、玻璃纤维等,以提高飞行器的强度和降低重量。
机身的设计通常考虑空气动力学性能、结构强度和易制造性。
2.2 旋翼四旋翼飞行器通过四个对称排列的旋翼进行飞行。
旋翼包括电动机、螺旋桨和支撑梁等部分。
电动机作为旋翼的动力源,驱动螺旋桨旋转产生升力。
螺旋桨通过变化旋转速度和角度来控制飞行器的悬停、升降、前进、转向等动作。
支撑梁连接旋翼和机身,起到支撑和传递动力的作用。
2.3 电池四旋翼飞行器的电池是提供动力的重要组成部分。
通常使用锂电池作为飞行器的能源来源,具有高能量密度和长飞行时间的优势。
电池的选择应考虑飞行器的重量和飞行时间的需求,并且要遵循安全使用和充电的原则。
2.4 控制系统四旋翼飞行器的控制系统包括飞行控制器和遥控器。
飞行控制器是飞行器的大脑,通过接收遥控器的信号和传感器的数据,计算出飞行器的状态和控制指令,并控制旋翼的转速和角度。
遥控器是操作飞行器的手持装置,通过无线信号与飞行控制器进行通信,传输操纵指令。
3. 工作原理四旋翼飞行器通过控制旋翼的转速和角度来产生升力和推力,从而实现飞行。
通过改变旋翼的转速差异,可以实现飞行器的前进、转向和悬停动作。
飞行控制器根据遥控器输入和传感器反馈的数据,计算出适当的转速和角度,并通过电调调节电动机的输出,控制旋翼的运动。
4. 稳定性控制四旋翼飞行器的稳定性控制是实现飞行器平稳飞行的关键。
通过加速度计、陀螺仪、磁力计等传感器,飞行控制器可以感知飞行器的姿态和运动状态。
长距离四旋翼飞行器动力系统设计模型优化随着社会的发展和科技的进步,飞行器在不同领域的应用也日益广泛。
其中,四旋翼飞行器因其垂直起降、悬停悬停、灵活机动等特点而备受关注。
然而,在设计长距离四旋翼飞行器时,动力系统设计模型优化是一个关键问题。
本文将从动力系统设计模型优化的角度来探讨长距离四旋翼飞行器的设计。
首先,我们需要了解长距离四旋翼飞行器的特点及其对动力系统的要求。
长距离的飞行需要稳定的动力输出和较长的续航时间。
因此,优化设计模型的目标应当是提高动力系统的效率、延长续航时间,并保证系统的可靠性和安全性。
动力系统的设计模型优化包括动力源的选择、传动系统的设计和电池容量的确定。
首先,动力源的选择对长距离四旋翼飞行器的性能影响很大。
一般来说,电力和内燃机是两种常见的选择。
电力系统具有环保、低噪音、低振动等优点,但续航时间相对较短。
内燃机系统则具有续航时间长、飞行距离远等特点,但噪音和尾气排放问题需注意。
在优化设计模型中,我们需要根据实际需求与限制,综合考虑飞行时间、载重能力和动力输出等因素,选择最适合的动力源。
其次,传动系统的设计也是动力系统的重要组成部分。
传动系统的设计不仅需要考虑动力传递的效率,还需要考虑机械结构的可靠性和安全性。
优化设计模型时,我们可以采用轻量化材料、合理的传动比和机械结构优化等方法,提高传动效率,减少能量损耗,并确保系统的可靠性。
最后,电池容量的确定也是动力系统优化设计模型中的关键问题。
电池容量的大小直接影响续航时间和飞行距离。
优化设计模型时,我们需要根据飞行时间和载重能力的要求,综合考虑电池的能量密度、重量和体积等因素,选择合适的电池容量。
除了以上的关键问题,优化设计模型还需要考虑其他的因素。
例如,系统的控制与管理策略、冗余设计以及安全性能的保证等。
在长距离四旋翼飞行器的设计中,这些因素都是不可忽视的。
总结而言,长距离四旋翼飞行器动力系统设计模型的优化需要综合考虑动力源的选择、传动系统的设计和电池容量的确定等因素。


《旋翼飞行器3D避障规划系统设计及高精度定轨飞行研究》篇一一、引言随着科技的不断进步,旋翼飞行器在军事、民用等领域的应用越来越广泛。
然而,其在实际应用中仍面临诸多挑战,如飞行过程中的避障和定轨问题。
为了解决这些问题,本文提出了一种旋翼飞行器3D避障规划系统设计及高精度定轨飞行研究。
该研究旨在提高旋翼飞行器的安全性和飞行效率,同时为未来无人机技术的发展提供新的思路和方向。
二、旋翼飞行器3D避障规划系统设计1. 系统架构设计旋翼飞行器3D避障规划系统主要包括感知模块、规划模块和执行模块。
感知模块通过搭载的传感器实时获取环境信息;规划模块根据环境信息,通过算法计算出最佳的避障路径;执行模块根据规划模块的指令,控制旋翼飞行器的飞行动作。
2. 传感器选择及布置为了实现高精度的避障,需要选择合适的传感器。
常见的传感器包括雷达、激光雷达、红外传感器等。
根据实际需求,本文选择激光雷达作为主要传感器,同时结合其他传感器进行互补。
传感器的布置应考虑到视场范围、分辨率、抗干扰能力等因素,以保证数据的准确性和实时性。
3. 避障算法设计避障算法是3D避障规划系统的核心。
本文采用基于全局路径规划和局部避障相结合的方法。
全局路径规划根据环境信息,预先计算出一条安全的飞行路径;局部避障则根据实时感知的环境信息,对飞行路径进行动态调整,以避免障碍物。
同时,为了确保飞行的稳定性和安全性,还需考虑能耗、飞行速度等因素。
三、高精度定轨飞行研究1. 定轨飞行技术原理高精度定轨飞行技术主要通过组合导航系统实现。
该系统结合了GPS、惯性导航、视觉导航等多种技术,以实现高精度的定位和导航。
通过实时获取旋翼飞行器的位置、速度和姿态等信息,实现对飞行轨迹的精确控制。
2. 定轨飞行算法设计定轨飞行算法是实现高精度定轨飞行的关键。
本文采用基于卡尔曼滤波的组合导航算法。
该算法能够融合多种传感器数据,实现对旋翼飞行器的高精度定位和导航。
同时,为了适应不同的飞行环境和任务需求,还需对算法进行优化和调整。

基于拓扑优化的四旋翼无人机结构设计作者:吉亮丁文杰谷春璐李玉华 SAEED Nouman 陈卓龙凯来源:《计算机辅助工程》2019年第03期摘要:为实现某四旋翼无人机的轻量化结构设计,采用Inspire进行拓扑优化设计,并对获得的拓扑优化结构进行静力分析和动力学分析。
分析结果表明,通过拓扑优化方法获得的无人机结构应力分布合理,结构位移小且频率较高,满足静态和动态结构设计要求。
研究结果可为实现低成本、轻量化的四旋翼无人机结构设计提供一条新的途径。
关键词:无人机; 四旋翼; 拓扑优化; Inspire中图分类号:TH128;TB115.1文献标志码:BStructural design of quadrotor unmanned aerial vehicle based on topology optimizationJI Liang DING Wenjie GU Chunlu LI Yuhua SAEED Nouman CHEN Zhuo LONG Kai (Renewable Energy School North China Electric Power University Beijing 102206 China)Abstract:To implement the lightweight structure design of a quadrotor unmanned aerial vehicle the topology optimization design is performed using Inspire and the static analysis and dynamic analysis of the obtained topology optimization structure are achieved. The analysis results show that stress distribution of the unmanned aerial vehicle structure derived from the topology optimization method isreasonable and the structure displacement is small and the structural frequency is high which meetsthe static and dynamic structure design requirements. The study results can provide an innovative way for the lowcost and light weight structure design of quadrotor unmanned aerial vehicle.Key words:unmanned aerial vehicle; quadrotor; topology optimization; Inspire0;引;言無人机广泛用于航拍、电力巡检、农业和影视拍摄等领域。

四旋翼飞控系统设计文档第一章绪论1.1研究背景任何由人类制造、能飞离地面、在空间飞行并由人来控制的飞行物,称为飞行器。
在大气层内飞行的飞行器称为航空器,如气球、滑翔机、飞艇、飞机、直升机等。
它们靠空气的静浮力或空气相对运动产生的空气动力升空飞行。
飞行器不仅广泛应用于军事,在民用领域的作用也在增加,机载 GPS 和 MEMS(Micro-Electro-Mechanical Systems)惯性传感器的飞行器甚至可以在没有人为控制的室外环境中飞行,也就是大家所熟知的无人机,。
因此国内外研究人员对飞行器进行了大量研究。
对飞行器的研究目前主要包括固定翼、旋翼及扑翼式三种,而我们所研究的四旋翼飞行器在布局形式上属于旋翼的一种,相对于别的旋翼式飞行器来说四旋翼飞行器结构紧凑,能产生更大的升力,而且不需要专门的反扭矩桨保持飞行器扭矩平衡。
四旋翼飞行器能够垂直起降,不需要滑跑就可以起飞和着陆,从而不需要专门的机场和跑道,降低了使用成本,可以分散配置,便于伪装,对敌进行突袭和侦察。
四旋翼飞行器能够自由悬停和垂直起降,结构简单,易于控制,这些优势决定了其具有广泛的应用领域,在民用,医疗,军事等领域都有着无限的潜力。
在民用领域,它可以进行航拍,以得到在地面难以测量和计算的数据;在医疗领域,四旋翼直升机可以进入普通地面机器人难以到达的地区进行搜救等活动,最大程度的避免人员财产损失;在军用方面,四旋翼直升机可以作为侦查使用,它飞行灵活,稳定,同时,若在四旋翼直升机上增加其他机械装置,则可以利用它完成更加复杂和重要的任务。
然而,作为一个 MIMO 非线性系统,四旋翼飞行器输入变量与输出变量之间的耦合作用、时变非线性的动力学特征、系统本身的不确定性及外部的干扰等的引入,使得系统的控制问题变得十分复杂。
如何能够设计出有足够的飞行动力并且具有良好稳定性的控制系统,是四旋翼飞行器如今面临的主要问题,这也使得强大而又易于控制的发动机和控制飞行器协调工作的控制系统成为四旋翼飞行器设计的关键。
小型攻击型四旋翼无人机系统设计分析一、引言无人机技术的飞速发展,使得四旋翼无人机成为了军事领域的重要装备之一、小型攻击型四旋翼无人机以其低成本、高机动性和灵活性得到了广泛的关注和应用。
本文将对小型攻击型四旋翼无人机的系统设计进行分析。
二、系统组成1.机身结构:小型攻击型四旋翼无人机的机身结构应该具备轻巧、坚固和耐用的特点,能够承受高强度的运动和突发力的冲击。
同时,机身应具备良好的气动性能,以提高飞行效率和稳定性。
2.动力系统:动力系统是小型攻击型四旋翼无人机的核心组成部分,通常采用电动驱动的无刷直流电机作为动力源。
电机通过旋转螺旋桨产生升力,控制螺旋桨的转速和旋转方向可以实现飞行、悬停和转弯等动作。
3.控制系统:控制系统是小型攻击型四旋翼无人机的“大脑”,负责控制飞行、导航和任务执行等功能。
通常包括姿态控制、位置控制、导航控制和飞行控制等模块。
姿态控制使用陀螺仪、加速度计和磁力计等传感器来感知机身的姿态变化,然后通过电调控制电机的转速来实现平衡。
位置控制使用GPS、激光雷达和视觉传感器等感知器件来获取位置信息,然后通过PID控制算法控制飞行方向和速度。
4.任务载荷系统:小型攻击型四旋翼无人机通常搭载各种任务载荷,如摄像机、传感器、弹药等。
摄像机可以在任务中提供实时监视和情报收集功能,传感器可以用于目标侦测和测距等功能,弹药可以进行攻击和破坏敌方目标。
5.通信系统:通信系统是小型攻击型四旋翼无人机与地面站或其他系统进行通信的关键环节。
通常使用无线电通信技术,如Wi-Fi、蓝牙和卫星通信等来实现数据传输和控制指令的交互。
同时,通信系统还应该具备一定的抗干扰和保密性能,以防止被敌方干扰和攻击。
三、系统设计优化1.重量优化:小型攻击型四旋翼无人机需要具备较高的机动性和机载载荷能力,但受限于自身重量的限制。
因此,在设计中应该尽量减少机身结构和各组件的重量,采用轻量化的材料和结构设计来提高整体性能。
2.能量效率优化:小型攻击型四旋翼无人机的电池容量有限,为了延长续航时间,应该通过优化动力系统和降低飞行的功耗来提高能量效率。
四翼飞行器动力学分析与建模1.引言四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。
这四轴飞行器(Quadrotor)是一种多旋翼飞行器。
四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。
因为它固有的复杂性,历史上从未有大型的商用四轴飞行器。
近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观。
本章通过分析四旋翼直升机的动力学机制,运用已知的物理定律和方程来建立表征系统动态过程的数学模型。
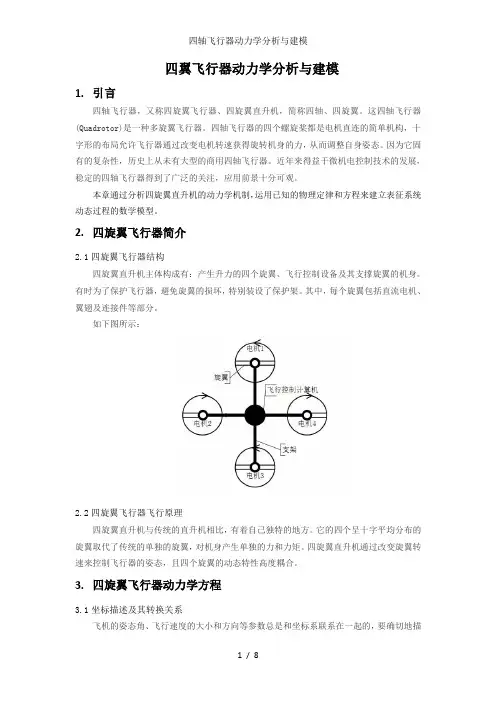
2.四旋翼飞行器简介2.1四旋翼飞行器结构四旋翼直升机主体构成有:产生升力的四个旋翼、飞行控制设备及其支撑旋翼的机身。
有时为了保护飞行器,避免旋翼的损坏,特别装设了保护架。
其中,每个旋翼包括直流电机、翼翅及连接件等部分。
如下图所示:2.2四旋翼飞行器飞行原理四旋翼直升机与传统的直升机相比,有着自己独特的地方。
它的四个呈十字平均分布的旋翼取代了传统的单独的旋翼,对机身产生单独的力和力矩。
四旋翼直升机通过改变旋翼转速来控制飞行器的姿态,且四个旋翼的动态特性高度耦合。
3.四旋翼飞行器动力学方程3.1坐标描述及其转换关系飞机的姿态角、飞行速度的大小和方向等参数总是和坐标系联系在一起的,要确切地描述飞机的运动状态,就要先建立适当的坐标系。
下面定义几种坐标系,并分析各坐标之间的相互转换关系:(1)地面坐标系E (OXYZ )地面坐标系用语研究飞机相对于地面的运动,确定飞机在空间的位置坐标X 、Y 、Z ,从而方便研究飞机的姿态、航向以及飞机相对起飞点的空间位置。
该坐标系原点固定于地面上飞机的起飞点,OX 轴指向飞机制定的飞行方向,OZ 轴垂直水平面向上,OY 轴垂直OXZ 平面。
(2)机体坐标系B (Oxyz )机体坐标系固定在机体上,原点设在飞机重心,纵轴Ox 平行于前后旋翼的连线,指向前方为正方向,竖轴Oz 平行于左右旋翼的连线,指向右方为正方向;轴Oy 与轴Ox 、Oz 所在平面垂直,并与轴Ox 、轴Oz 组成右手坐标系。
四旋翼无人飞行器设计与实验研究的开题报告一、选题背景及意义随着科技的不断发展,无人机已经广泛应用于农业、环境监测、救援、安保等领域。
而四旋翼无人飞行器由于其灵活、稳定、可控等特点,在室内、室外、风力较小的环境中具有广泛的应用前景。
本研究旨在设计和实验一种基于四旋翼的无人飞行器,并探索其在悬停、航行、姿态控制等方面的应用。
二、研究内容及方法1.无人飞行器设计(1)飞行器主要部件的选型和设计;(2)飞行器控制系统的设计,包括姿态控制、飞行控制、安全控制等。
2.无人飞行器实验(1)飞行器性能测试,包括悬停、航行、载荷能力等;(2)姿态控制实验,包括角速度控制、角度控制、PID控制等。
3.研究方法(1)参考文献研究;(2)设计手册、飞行器工程手册等资料查阅;(3)使用仿真软件进行初步测试;(4)进行实验室实验。
三、预期结果设计并成功试飞一架基于四旋翼的无人飞行器,能够实现悬停、航行、载荷能力等基本性能,并实现姿态控制,包括角速度控制、角度控制、PID控制等。
四、可能遇到的问题及解决方法1.设计不合理导致无法飞行问题。
解决方法:书籍、专利等资料查找,咨询相关领域专家。
2.实验前期仿真测试结果不准确问题。
解决方法:改变仿真软件,检查测试环境的合理性,加强对程序的分析。
3.技术难度较大,长时间解决不了问题。
解决方法:与合作单位、专家进行讨论协商,不断完善解决方案。
四、研究计划及进度安排1.文献综述 2周2.设计方案确定 2周3.飞机部件选型和设计 4周4.控制系统设计 4周5.设计报告编写 2周6.编写程序及模拟测试 4周7.实验室实验 8周8.论文写作及答辩准备 8周五、参考文献[1] 李培生. 无人机系统工程[M]. 北京:国防工业出版社,2015.[2] 张天泽,赵岩. 基于四旋翼的无人机姿态控制研究[J].计算机系统应用,2013,22(8):129-132.[3] 赵天维,姜太平. 基于PID控制的四旋翼无人直升机姿态控制算法[J].自动化与仪器仪表,2015,101(9):187-192。
四旋翼飞行器飞行控制系统研究与设计四旋翼飞行器是无人机中常见的一种飞行器类型,在军事、民用等领域有着广泛的应用。
而对于这种飞行器,飞行控制系统的研究与设计是其性能和稳定性的关键。
一、四旋翼飞行器的工作原理四旋翼飞行器是一种通过四个独立的旋翼进行飞行的飞行器。
它的工作原理是通过调节不同旋翼的转速和倾斜角度,控制飞行器的姿态和飞行方向。
通过这种方式,飞行器可以实现上下、前后、左右的飞行运动,并且可以在空中悬停。
二、四旋翼飞行器飞行控制系统基本组成四旋翼飞行器的飞行控制系统主要由传感器、控制算法和执行器三部分组成。
传感器用于获取飞行器的姿态和状态数据,控制算法用于根据传感器数据计算控制指令,执行器则用于执行控制指令,调节旋翼的转速和倾斜角度。
1. 传感器传感器是飞行控制系统的数据获取部分,主要用于获取飞行器的姿态、位置和运动状态等数据。
常见的传感器包括陀螺仪、加速度计、磁力计、气压计等。
陀螺仪用于测量飞行器的角速度,加速度计用于测量飞行器的加速度,磁力计用于测量飞行器的方向,气压计用于测量飞行器的高度。
这些传感器可以提供给控制算法所需的姿态和状态数据,为飞行器的控制提供支持。
2. 控制算法控制算法是飞行控制系统的核心部分,它主要用于根据传感器数据计算控制指令,调节飞行器的姿态和飞行状态。
常见的控制算法包括PID控制、模糊控制、自适应控制等。
PID控制是一种经典的控制算法,它通过比例、积分和微分三部分组成,可以根据误差信号调节执行器输出,实现对飞行器的精确控制。
模糊控制是一种基于模糊逻辑的控制方法,可以处理复杂的非线性系统,对于四旋翼飞行器的控制具有一定的优势。
自适应控制是一种基于自适应参数的控制方法,可以根据飞行器的动态特性实时调节控制参数,适应不同的飞行环境和工况。
3. 执行器执行器是飞行控制系统的执行部分,主要用于控制飞行器的旋翼转速和倾斜角度,调节飞行器的姿态和飞行状态。
常见的执行器包括电动调速器、舵机等。
四翼飞行器动力学分析与建模1.引言四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。
这四轴飞行器(Quadrotor)是一种多旋翼飞行器。
四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。
因为它固有的复杂性,历史上从未有大型的商用四轴飞行器。
近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观。
本章通过分析四旋翼直升机的动力学机制,运用已知的物理定律和方程来建立表征系统动态过程的数学模型。
2.四旋翼飞行器简介2.1四旋翼飞行器结构四旋翼直升机主体构成有:产生升力的四个旋翼、飞行控制设备及其支撑旋翼的机身。
有时为了保护飞行器,避免旋翼的损坏,特别装设了保护架。
其中,每个旋翼包括直流电机、翼翅及连接件等部分。
如下图所示:2.2四旋翼飞行器飞行原理四旋翼直升机与传统的直升机相比,有着自己独特的地方。
它的四个呈十字平均分布的旋翼取代了传统的单独的旋翼,对机身产生单独的力和力矩。
四旋翼直升机通过改变旋翼转速来控制飞行器的姿态,且四个旋翼的动态特性高度耦合。
3.四旋翼飞行器动力学方程3.1坐标描述及其转换关系飞机的姿态角、飞行速度的大小和方向等参数总是和坐标系联系在一起的,要确切地描述飞机的运动状态,就要先建立适当的坐标系。
下面定义几种坐标系,并分析各坐标之间的相互转换关系:(1)地面坐标系E (OXYZ )地面坐标系用语研究飞机相对于地面的运动,确定飞机在空间的位置坐标X 、Y 、Z ,从而方便研究飞机的姿态、航向以及飞机相对起飞点的空间位置。
该坐标系原点固定于地面上飞机的起飞点,OX 轴指向飞机制定的飞行方向,OZ 轴垂直水平面向上,OY 轴垂直OXZ 平面。
(2)机体坐标系B (Oxyz )机体坐标系固定在机体上,原点设在飞机重心,纵轴Ox 平行于前后旋翼的连线,指向前方为正方向,竖轴Oz 平行于左右旋翼的连线,指向右方为正方向;轴Oy 与轴Ox 、Oz 所在平面垂直,并与轴Ox 、轴Oz 组成右手坐标系。
专利名称:一种4轴无人机结构专利类型:实用新型专利
发明人:陈大田,江练卫
申请号:CN201721291909.2申请日:20170930
公开号:CN207843309U
公开日:
20180911
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种4轴无人机结构,包括主机架、起落架和上罩,上罩设置在主机架的上方,起落架设置在主机架的下方,起落架上等间距设有四个电机,电机驱动螺旋翼旋转,主机架内设有电源、PMU电源管理器、LED控制器、飞行控制器和GPS模组,其采用4个螺旋动力翼均布结构,结构紧凑,同时满足多姿态飞行控制要求;同时可以进行其他应用改装。
申请人:珠海华星科技有限公司
地址:519000 广东省珠海市唐家湾镇金鼎科技工业园金恒二路2号仓库三、四层
国籍:CN
代理机构:广州三环专利商标代理有限公司
代理人:温旭
更多信息请下载全文后查看。