工程测量计算坐标.pdf
- 格式:pdf
- 大小:177.50 KB
- 文档页数:3
知道方位角和距离怎么计算坐标设原点坐标为(x,y),那么计算坐标(x1,y1)为x1=x+s·cosθy1=y+s·sinθ其中θ为方位角,s为距离CAD里计算方位角和距离CAD默认的世界坐标系跟测量上用的坐标系是不同的。
世界坐标系中的X即测量坐标系中的Y,世界坐标系中的Y即测量坐标系中的X。
不知道你是不是要编程的方法或源程序?下面是在CAD下的常用操作方法:用命令id可以查看点的XYZ坐标例如:命令: '_id 指定点: X = 517.0964 Y = 431.1433 Z = 0.0000命令: ID 指定点: X = 879.0322 Y = 267.6949 Z = 0.0000用命令dist(快捷命令di)即可知道两点间的角度和距离例如:命令: '_dist 指定第一点: 指定第二点:距离 = 397.1308,XY 平面中的倾角 = 335d41'46.7",与 XY 平面的夹角 = 0d0'0.0"X 增量 = 361.9358, Y 增量 = -163.4483, Z 增量 = 0.0000其中的“XY 平面中的倾角= 335d41'46.7”是世界坐标系内的平面夹角,用450度减去这个值335d41'46.7"即是坐标方位角114°18′13.3〃。
你可以用计算器验算一下,点1、X = 431.1433,Y = 517.0964;点2、X = 267.6949,Y = 879.0322的坐标方位角和距离值是不是114°18′13.3〃和397.131m。
已知两坐标点求方位角和距离的计算公式如点A(X1,Y1 ) 点B(X2,Y2) A到B的方位角为:Tan(Y2-Y1)/(X2-X1)其中(X2-X1)>0时加360°,(X2-X1)<0时加180° 而距离就是((X2-X1)平方+(Y2-Y1)平方)最后开方得到的值即为A到B距离方位角坐标计算公式设角为x: tanx=a(对边Y1-Y2)/b(邻边X1-X2)=z,因为a,b,z可求出,利用三角函数tan可求出方位角x,谢谢采纳!追问能不能再说的清楚点回答问题是你学过三角函数吗?学了就很容易理解了,在三角形abc中,sinx=对边a/斜边c,cosx=邻边b/斜边c,tanx=对边a/邻边b,其中sinx,cosx,tanx是定值,可以在科学计算器中得到,如果还是不理解的话建议还是先看看这方面的知识吧,希望我的回答对你有所帮助!请问前辈,坐标反算中求方位角的计算公式已知A(X1,Y1)、B(X2,Y2)先求出AB的象限角:θ=arctan((Y2-Y1)/(X2-X1))再根据条件将象限角θ转换为方位角α:当X1-X2>0 , Y1-Y2>0,α=θ;当X1-X2<0 , Y1-Y2>0,α=θ+180°当X1-X2<0 , Y1-Y2<0,α=θ+180°当X1-X2>0 , Y1-Y2<0,α=θ+360°坐标正算编辑坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
工程测量人员使用手册全站仪测量及导线计算常用公式全集二〇一二年三月十五日目录一、方位角的计算公式二、平曲线转角点偏角计算公式三、平曲线直缓、缓直点的坐标计算公式四、平曲线上任意点的坐标计算公式五、竖曲线上点的高程计算公式六、超高计算公式七、地基承载力计算公式八、标准差计算公式九、坐标中线测量与计算十、全站仪的使用方法和坐标测量步骤一、 方位角的计算公式1. 字母所代表的意义:x 1:QD 的X 坐标 y 1:QD 的Y 坐标 x 2:ZD 的X 坐标 y 2:ZD 的Y 坐标 S :QD ~ZD 的距离 α:QD ~ZD 的方位角2. 计算公式:()()212212y y x x S -+-=1)当y 2- y 1>0,x 2- x 1>0时:1212x x y y arctg--=α 2)当y 2- y 1<0,x 2- x 1>0时:1212360x x y y arctg --+︒=α 3)当x 2- x 1<0时:1212180x x y y arctg--+︒=α 二、 平曲线转角点偏角计算公式1. 字母所代表的意义:α1:QD ~JD 的方位角 α2:JD ~ZD 的方位角 β:JD 处的偏角2. 计算公式:β=α2-α1(负值为左偏、正值为右偏)三、 平曲线直缓、缓直点的坐标计算公式1. 字母所代表的意义:U :JD 的X 坐标 V :JD 的Y 坐标 A :方位角(ZH ~JD )T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=D :JD 偏角,左偏为-、右偏为+2. 计算公式:直缓(直圆)点的国家坐标:X ′=U+Tcos(A+180°)Y ′=V+Tsin(A+180°)缓直(圆直)点的国家坐标:X ″=U+Tcos(A+D)Y ″=V+Tsin(A+D)四、 平曲线上任意点的坐标计算公式1. 字母所代表的意义:P :所求点的桩号B :所求边桩~中桩距离,左-、右+M :左偏-1,右偏+1 C :JD 桩号 D :JD 偏角 L s :缓和曲线长 A :方位角(ZH ~JD ) U :JD 的X 坐标 V :JD 的Y 坐标T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=I=C -T :直缓桩号 J=I+L :缓圆桩号s L DRJ H -+=180π:圆缓桩号K=H+L :缓直桩号2. 计算公式: 1)当P<I 时中桩坐标:X m =U+(C -P)cos(A+180°) Y m =V+(C -P)sin(A+180°) 边桩坐标:X b =X m +Bcos(A+90°) Y b =Y m +Bsin(A+90°)2)当I<P<J 时()s230RL I P MA O π-︒+=()()2390R I P I P G ---=中桩坐标:X m =U+Tcos(A+180°)+GcosO Y m =V+Tsin(A+180°)+GsinO()s290RL I P W π-︒=边桩坐标:X b =X m +Bcos(A+MW+90°) Y b =Y m +Bsin(A+MW+90°)3)当J<P<H 时()()R J P L M A R J P R L M A O s s πππ-+︒+=⎪⎭⎫⎝⎛-︒+︒+=909090 ()RJ P R G π-︒=90sin2中桩坐标:()O G R L M A R L L A T U X s ss m cos 30cos 90180cos 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()O G R L M A R L L A T V Y s ss m sin 30sin 90180sin 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()RJ P W π-︒=90边桩坐标:X b =X m +Bcos(O+MW+90°) Y b =Y m +Bsin(O+MW+90°)4)当H<P<K 时()sRL K P MMD A O π230180-︒-︒++= ()2390R P K P K G ---=中桩坐标:X m =U+Tcos(A+MD)+GcosO Y m =V+Tsin(A+MD)+GsinO()s290RL K P W π-︒=边桩坐标:X b =X m +Bcos(A+MD -MW+90°) Y b =Y m +Bsin(A+MD -MW+90°)5)当P>K 时中桩坐标:X m =U+(T+P -K)cos(A+MD) Y m =V+(T+P-K)sin(A+MD) 边桩坐标:X b =X m +Bcos(A+MD+90°) Y b =Y m +Bsin(A+MD+90°)注:计算公式中距离、长度、桩号单位:“米”;角度测量单位:“度”;若要以“弧度”为角度测量单位,请将公式中带°的数字换算为弧度。
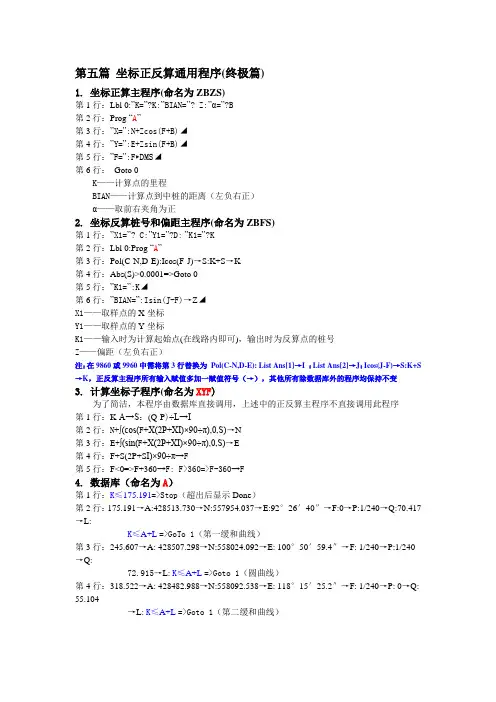
第五篇坐标正反算通用程序(终极篇)1. 坐标正算主程序(命名为ZBZS)第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B第2行:Prog “A”第3行:”X=”:N+Zcos(F+B)◢第4行:”Y=”:E+Zsin(F+B)◢第5行:”F=”:F►DMS◢第6行:Goto 0K——计算点的里程BIAN——计算点到中桩的距离(左负右正)α——取前右夹角为正2. 坐标反算桩号和偏距主程序(命名为ZBFS)第1行:”X1=”? C:”Y1=”?D:”K1=”?K第2行:Lbl 0:Prog “A”第3行:Pol(C-N,D-E):Icos(F-J)→S:K+S→K第4行:Abs(S)>0.0001=>Goto 0第5行:”K1=”:K◢第6行:”BIAN=”:Isin(J-F)→Z◢X1——取样点的X坐标Y1——取样点的Y坐标K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号Z——偏距(左负右正)注:在9860或9960中需将第3行替换为Pol(C-N,D-E): List Ans[1]→I :List Ans[2]→J:Icos(J-F)→S:K+S →K,正反算主程序所有输入赋值多加一赋值符号(→),其他所有除数据库外的程序均保持不变3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-A→S:(Q-P)÷L→I第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E第4行:F+S(2P+S I)×90÷π→F第5行:F<0=>F+360→F: F>360=>F-360→F4. 数据库(命名为A)第1行:K≤175.191=>Stop(超出后显示Done)第2行:175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/240→Q:70.417→L:K≤A+L =>GoTo 1(第一缓和曲线)第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q:72.915→L: K≤A+L =>Goto 1(圆曲线)第4行:318.522→A: 428482.988→N:558092.538→E: 118°15′25.2″→F: 1/240→P: 0→Q: 55.104→L: K≤A+L =>Goto 1(第二缓和曲线)第5行:373.627→A:428453.283→N:558138.912→E:124°50′4.5″→F:0→P:-1/180→Q:67.222→L:K≤A+L=>Goto 1:Stop(下一曲线的第一缓和曲线,示例为S型曲线,超出后显示Done)第6行:Lbl 1:Prog “XYF”A——曲线段起点的里程N——曲线段起点的x坐标E——曲线段起点的y坐标F——曲线段起点的坐标方位角P——曲线段起点的曲率(半径倒数,直线为0,左负右正)Q——曲线段终点的曲率(半径倒数,直线为0,左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)正算主程序可以计算一般边桩的坐标,如要计算类似涵洞端墙的坐标需增加两个变量,具体方法参考本程序集中的第1篇辛普生公式的坐标计算通用程序(2)适用于任意线形:直线(0→P、0→Q)、圆曲线(圆半径倒数→P、圆半径倒数→Q)、缓和曲线(0或圆半径倒数→P、圆半径倒数或0→Q)、卵形曲线(接起点圆的半径倒数→P、接终点圆的半径倒数→Q),曲线左转多加一负号。

《工程施工测量》坐标计算工程施工测量是指在工程建设过程中对各种位置、尺寸、高程等进行测量和计算的工作。
其中,坐标计算是测量工作的重要内容之一、坐标计算旨在确定一些点的平面坐标或者空间坐标,并利用这些坐标进行工程设计、施工和验收等工作。
坐标计算的基本原理是通过测量获取各点的坐标数据,然后利用计算方法进行数学计算得出点的坐标。
常见的坐标计算方法有平差计算法、微分计算法和三角计算法。
平差计算法是通过观测数据的处理求解出未知点的坐标。
其基本思想是根据观测数据建立相关方程组,并通过最小二乘法求解。
平差计算法通常包括三个步骤:建立方程、求解方程组和检查与分析。
建立方程时,需要根据观测数据的类型确定方程的形式,如平面坐标观测通常采用距离方程,而空间坐标观测通常采用坐标方程。
求解方程组时,可以采用高斯消元法、逆平差法等方法进行计算。
检查与分析时,需要对计算结果进行检查,判断计算精度是否符合要求,并对计算误差进行分析。
微分计算法是通过已知点的坐标和测量数据,在测区域内进行坐标计算的方法。
其基本思想是通过观测数据的微分运算,计算出所需的未知点的坐标。
微分计算法通常包括两个步骤:设定原点和计算坐标。
设定原点是确定测区域中的一个已知点作为空间原点,然后在该点建立一套坐标系。
计算坐标时,通过测量数据的微分运算,计算出未知点的坐标。
具体的计算方法有高程分布的微分计算、立体观测的微分计算和等值线的微分计算等。
三角计算法是通过测量三角形的边长和角度来计算点的坐标。
其基本思想是根据三角函数的相关定理和公式,利用测量数据求解未知点的坐标。
三角计算法通常包括两个步骤:测量三角形和计算坐标。
测量三角形时,通过测量三角形的边长和角度,来获取所需的观测数据。
计算坐标时,利用测量数据和三角函数的关系,通过计算公式来求解未知点的坐标。
常用的三角计算法有正弦定理、余弦定理和正切定理等。
坐标计算在工程施工测量中具有重要的作用。
它可以提供工程设计和施工中所需的位置、尺寸和高程等参数,为工程建设提供基础数据。
工程测量坐标计算公式工程测量是工程建设的重要环节,准确的坐标计算是保证工程质量和施工安全的基础。
本文将介绍工程测量中常用的坐标计算公式,帮助读者更好地理解并应用于实践中。
一、坐标计算的基础知识在工程测量中,常用的坐标系统有直角坐标系和大地坐标系。
直角坐标系以某一点为原点,建立笛卡尔坐标系,用x、y、z三个轴线表示空间位置。
大地坐标系则以地球为基准,通过经度、纬度和高程来确定点的相对位置。
二、坐标计算公式1. 直角坐标系的坐标计算公式在直角坐标系中,常用的坐标计算公式有:- 两点间距离计算公式:设A点坐标为(x1, y1, z1),B点坐标为(x2, y2, z2)。
则两点间的距离d计算公式如下:d = √((x2-x1)^2 + (y2-y1)^2 + (z2-z1)^2)- 点到直线距离计算公式:设点A的坐标为(x1, y1, z1),直线方程为Ax + By + Cz + D = 0。
则A点到直线的距离d计算公式如下:d = |Ax1 + By1 + Cz1 + D| / √(A^2 + B^2 + C^2)- 点到平面距离计算公式:设点A的坐标为(x1, y1, z1),平面方程为Ax + By + Cz + D = 0。
则A点到平面的距离d计算公式如下:d = |Ax1 + By1 + Cz1 + D| / √(A^2 + B^2 + C^2)2. 大地坐标系的坐标计算公式在大地坐标系中,常用的坐标计算公式有:- 两点间距离计算公式:根据两点的经纬度计算其球面距离,公式如下:d = R * arccos(sinφ1*sinφ2 + cosφ1*cosφ2*cos(λ2-λ1))其中,R为地球半径,φ为纬度,λ为经度。
- 两点间方位角计算公式:根据两点经纬度计算其中一点相对于另一点的方位角,公式如下:α = arctan((sinΔλ * cosφ2) / (cosφ1*sinφ2 -sinφ1*cosφ2*cosΔλ))其中,φ为纬度,λ为经度,Δλ为两点经度差。
工程测量坐标正反算带公式一、几何平差法几何平差法是一种基于观测数据的平差方法,通过求解误差方程组,确定测量点的坐标。
它的基本公式如下:1.坐标变形方程:在直角坐标系中,测量点的坐标可以表示为:x=X+Δxy=Y+Δy其中,x和y为测量点的坐标,X和Y为控制点的坐标,Δx和Δy 为测量点的改正数。
2.改正数计算公式:改正数可以通过解算误差方程组得到。
误差方程组的基本形式如下:AX+BY+C=0其中,A、B和C为系数,可以通过测量数据和控制点坐标的差异来确定。
3.改正数递推关系:通过改正数递推关系可以计算出最终的改正数。
其基本形式如下:Δx=ΣAX/ΣA²Δy=ΣBY/ΣB²其中,ΣAX和ΣA²是所有测量点坐标与控制点坐标的差别的总和。
二、最小二乘法最小二乘法是一种通过最小化观测数据和控制点坐标之间的差异来确定测量点坐标的方法。
它通过最小化误差平方和,得到测量点坐标的估计值。
最小二乘法的基本公式如下:1.误差方程:误差方程的一般形式如下:δX=AX+BY+C其中,δX为观测数据和估计值之间的差异,A、B和C为系数。
通过最小化误差平方和,可以求解系数的估计值。
2.系数估计方法:通过最小化误差平方和,可以得到系数的估计值。
其基本形式如下:A = (∑ x²y - ∑ xy∑ x) / (n∑ x² - (∑ x)²)B = (n∑ xy - ∑ x∑ y) / (n∑ x² - (∑ x)²)C = (∑ x²∑ y - ∑ xy∑ x²) / (n∑ x² - (∑ x)²)其中,x和y为控制点的坐标,n为测量点的数量。
3.坐标计算:通过求解系数估计值,可以得到测量点的坐标。
其基本形式如下:x=(y-∑By+ΔB)/A其中,y为测量点的坐标,∑By为所有观测数据和估计值之间差异的总和,ΔB为改正数。

1.主程序(TYQX js)"1.SZ => XY":"2.XY => SZ":N:U"X0":V"Y0":O"S0":G"F0":H"LS":P"R0":R"RN":Q:C=1P:D=(P-R)(2HPR):E=180π:N=1=>Goto 1:≠>Go to 2Δ←┘Lbl 1:{SZ}:SZ:W=Abs(S-O):Prog "SUB1":X"XS"=X◢Y"YS"=Y◢Goto 1←┘Lbl 2:{XY}:XY:I=X:J=Y:Prog "SUB2":S"S"=O+W◢Z"Z"=Z◢Goto 22. 正算子程序(SUB1)A=0.1739274226:B=0.3260725774:K=0.0694318442:L=0.3300094782:F=1-L:M=1-K:X=U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW(C+F WD))+Acos(G+QEMW(C+MWD))):Y=V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FW D))+Asin(G+QEMW(C+MWD))):F=G+QEW(C+WD)+90:X=X+ZcosF:Y=Y+ZsinF3. 反算子程序(SUB2)T=G-90:W=Abs((Y-V)cosT-(X-U)sinT):Z=0:Lbl 0:Prog "SUB1":L=T+QEW(C+WD):Z=(J-Y)cosL-(I-X)sinL:AbsZ<1E-6=>Goto1:≠>W=W+Z:Goto 0Δ←┘Lbl 1:Z=0:Prog "SUB1":Z=(J-Y)sinF二、使用说明1、规定(1) 以道路中线的前进方向(即里程增大的方向)区分左右;当线元往左偏时,Q=-1;当线元往右偏时,Q=1;当线元为直线时,Q=0。
工程图纸xy坐标如何计算在工程领域中,准确计算和确定工程图纸上的XY坐标是非常重要的。
这些坐标用于标记建筑物、构件以及其他元素的位置,为工程设计和施工提供准确的依据。
本文将介绍一些常见的工程图纸XY坐标计算方法,帮助读者更好地理解和应用。
1. 工程图纸的坐标系在计算XY坐标之前,我们需要先了解工程图纸的坐标系。
通常,工程图纸使用笛卡尔坐标系,即平面直角坐标系。
该坐标系由两个垂直于彼此的轴组成,分别代表X和Y方向。
X轴通常表示水平方向,而Y轴代表垂直方向。
这个坐标系将图纸的整个区域划分成多个小区域,每个区域都有一个唯一的XY坐标。
2. 单个元素的坐标计算对于工程图纸上的单个元素,如一个建筑物或者一个柱子,我们可以通过以下步骤计算其坐标:1.在图纸上选择两个已知坐标点,分别记为A和B。
这两个点的坐标应该已经通过其他方式测量得出。
2.使用刻度尺或测量工具,测量出A点和B点在图纸上的距离,分别记为dX和dY。
确保使用相同的单位进行测量。
3.观察图纸上元素相对于A点的位置,以确定其横坐标(X坐标)和纵坐标(Y坐标)的关系。
例如,元素在X轴右侧则横坐标为正,左侧则为负;元素在Y轴上方则纵坐标为正,下方则为负。
4.使用下面的公式计算元素的坐标:X = Xa + (dX / scale) Y = Ya + (dY / scale)其中,Xa和Ya分别是已知点A的横坐标和纵坐标,scale代表图纸上的比例尺。
通过这个公式,我们可以根据已知坐标点和距离,推算出元素的坐标。
3. 多个元素的坐标计算有时候,我们需要计算多个元素的坐标,比如在一个建筑群中确定各个建筑物的位置。
这时可以利用已知坐标点、距离和方向来计算其他元素的坐标。
1.选择一个已知坐标点作为基准点,记为O点。
此点的坐标应已经通过其他方式得到。
2.在图纸上选择一个需要计算坐标的元素,记为P点。
3.测量OP两点间的距离,记为dOP,并确定P点相对于O点的方向。
工程测量计算之-----(一)坐标正反算详解一、方位角、坐标方位角测量工作中、常用方位角来表示直线的方向。
方位角是由标准方向的北端起,顺时针方向度量到某直线的夹角,取值范围为0°-360°,如下图所示。
若标准方向为真子午线方向,则其方位角称为真方位角,用A表示真方位角;若标准方向为磁子午线方向,则其方位角称为磁方位角,用Am表示磁方位角。
若标准方向为坐标纵轴,则称其为坐标方位角,用α表示。
(在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针度量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。
)所以,我们测量中常说的方位角其实是坐标方位角,也就是X轴顺时针旋转至所在直线的角度。
二、象限角以基本方向北端或南端起算,顺时针或逆时针方向量至直线的水平角,称为象限角,用R表示。
象限角不但要表示角度大小,而且还要注明该直线所在的象限。
从坐标纵轴的北端或南端顺时针或逆时针起算至直线的锐角称为坐标象限角。
其角值变化从0°~90°,为了表示直线的方向,应分别注明北偏东、北偏西或南偏东、南偏西。
如北东85°,南西47°等。
显然,如果知道了直线的方位角,就可以换算出它的象限角,反之,知道了象限也就可以推算出方位角。
三、坐标正反算公式详解坐标正算根据直线的坐标方位角、边长和一个已知端点的坐标计算直线上另一端点坐标的过程。
或若两点间的平面位置关系由极坐标化为直角坐标,称为坐标正算。
1、坐标计算条件①起算点(定位点)的平面坐标(X0,Y0),②起算点至待求点的坐标方位角α,③起算点至待求点的平面距离D。
2、坐标计算过程坐标反算根据两已知点的平面坐标,计算该直线的方位角及两点间平面距离的过程。
或若两点间的平面位置关系由直角坐标化为极坐标,称为坐标反算。
α=arctan(△y / △x)D=√(△x*△x + △y*△y)其中,用计算器计算出的α称为象限角,之后还要根据△x、△y的正负号转换为坐标方位角。
工程测量坐标正反算公式工程测量坐标正反算公式是工程测量中常用的计算方法,用于将实际测量得到的水平角、垂直角和距离等数据计算为平面坐标系或空间坐标系中的点的坐标。
这些计算方法包括平距法、交会法、改正数法等。
以下将介绍其中的一些常用公式。
1.平距法:平距法适用于平面三角测量,其中已知一个角和两个边长,需要计算第三个边长。
公式如下:AB² = AC² + BC² - 2 * AC * BC * cos(∠CAB)2.交会法:交会法常用于平面控制测量,其中通过观测三个方向上的角度,以及相应的两个边长,计算其中一点相对于测站的坐标。
公式如下:x = 观测距离 * sin(观测方向角1) / cos(观测方向角2) + 坐标X1y = 观测距离 * sin(观测方向角3) / cos(观测方向角2) + 坐标Y13.改正数法:改正数法常用于平面闭合多边形控制测量,其中通过对内角的观测进行闭合多边形的平差计算,求得闭合差改正数。
公式如下:dX = ∑(边长 * cos(内角) / ∑(边长²) * 闭合差)dY = ∑(边长 * sin(内角) / ∑(边长²) * 闭合差)4.高差改正:在空间测量中,经常需要进行高程的改正计算。
其中,正算高差改正应用于已知起点与终点的高差、测点的高差差值以及测点的距离,计算出测点的高程。
公式如下:高程差=(终点高程-起点高程)/测点距离*高差差值5.方位角正算:在实际测量中,有时需要根据起点和终点的坐标计算出方位角。
公式如下:tan(方位角) = (终点纵坐标 - 起点纵坐标) / (终点横坐标 - 起点横坐标)6.反算坐标:反算坐标是指通过已知起点的坐标、观测角度和距离,计算出目标点的坐标。
公式如下:终点纵坐标 = 坐标纵差 * sin(观测方向角) + 起点纵坐标终点横坐标 = 坐标横差 * cos(观测方向角) + 起点横坐标这些公式都是工程测量中常用的基本公式,通过使用它们,我们可以根据测量数据计算出点的坐标。
《建筑工程测量》坐标正、反算导线测量的最终目的是要获得各导线点的平面直角坐标,因此外业工作结束后就要进行内业计算,以求得导线点的坐标。
一、坐标计算的基本公式1.根据已知点的坐标及已知边长和坐标方位角计算未知点的坐标,即坐标的正算。
如图6-1所示,设A 为已知点,B 为未知点,当A 点的坐标(X A , Y A )和边长D AB 、坐标方位角αAB 均为已知时,则可求得B 点的坐标X B 、Y B 。
由图可知:⎭⎬⎫∆+=∆+=AB A B AB A B Y Y Y X X X (6-1) 其中,坐标增量的计算公式为:⎭⎬⎫⋅=∆⋅=∆AB AB AB AB AB AB sin cos ααD Y D X (6-2) 式中∆X AB ,∆Y AB 的正负号应根据cos αAB 、sin αAB 的正负号决定,所以式(6-1)又可写成:⎭⎬⎫⋅+=⋅+=AB AB A B AB AB A B sin cos ααD Y Y D X X (6-3)图6-1 导线坐标计算示意图2.由两个已知点的坐标反算其坐标方位角和边长,即坐标的反算如图6-5所示,若设A 、B 为两已知点,其坐标分别为X A 、Y A 和X B 、Y B 则可得:AB AB AB tan X Y ∆∆=α (6-4)ABAB AB AB AB cos sin ααX Y D ∆=∆= (6-5) 或 D AB =2AB 2AB )()(Y X ∆+∆ (6-6) 上式中,∆X AB = X B = X A ,∆Y AB = Y B - Y A 。
由式(6-4)可求得αAB 。
αAB 求得后,又可由(6-5)式算出两个D AB ,并作相互校核。
如果仅尾数略有差异,就取中数作为最后的结果。
需要指出的是:按(6-4)式计算出来的坐标方位角是有正负号的,因此,还应按坐标增量 ∆X 和 ∆Y 的正负号最后确定AB 边的坐标方位角。
即:若按(6-4)式计算的坐标方位角为:XY ∆∆='arctanα (6-7) 则AB 边的坐标方位角αAB 参见图6-11应为: 在第Ⅰ象限,即当 ∆X >0,∆Y >0时,αα'=AB ,AB α在0︒ ~ 90︒在第Ⅱ象限,即当 ∆X <0,∆Y >0时,αα'-︒=180AB ,αAB 在90︒ ~ 180︒在第Ⅲ象限,即当 ∆X <0,∆Y <0时,αα'+︒=180AB ,αAB 在180︒ ~ 270︒ (6-8)在第Ⅳ象限,即当 ∆ X > 0,∆Y < 0时,αα'-︒=360AB ,αAB 在270︒ ~ 360︒也就是当 ∆X > 0时,应给 α' 加360︒ ;当 ∆X < 0时,应给 α' 加180︒ 才是所求AB 边的坐标方位角。
知道方位角和距离怎么计算坐标
设原点坐标为(x,y),那么计算坐标(x1,y1)为
x1=x+s·cosθ
y1=y+s·sinθ
其中θ为方位角,s为距离
CAD里计算方位角和距离
CAD默认的世界坐标系跟测量上用的坐标系是不同的。
世界坐标系中的X即测量坐标系中的Y,世界坐标系中的Y即测量坐标系中的X。
不知道你是不是要编程的方法或源程序?下面是在CAD下的常用操作方法:
用命令id可以查看点的XYZ坐标
例如:
命令: '_id 指定点: X = 517.0964 Y = 431.1433 Z = 0.0000
命令: ID 指定点: X = 879.0322 Y = 267.6949 Z = 0.0000
用命令dist(快捷命令di)即可知道两点间的角度和距离
例如:
命令: '_dist 指定第一点: 指定第二点:
距离= 397.1308,XY 平面中的倾角= 335d41'46.7",与XY 平面的夹角= 0d0'0.0"
X 增量= 361.9358,Y 增量= -163.4483,Z 增量= 0.0000
其中的“XY 平面中的倾角= 335d41'46.7”是世界坐标系内的平面夹角,用450度减去这个值335d41'46.7"即是坐标方位角114°18′13.3〃。
你可以用计算器验算一下,点1、X = 431.1433,Y = 517.0964;点2、X = 267.6949,Y = 879.0322的坐标方位角和距离值是不是114°18′13.3〃和397.131m。
已知两坐标点求方位角和距离的计算公式
如点A(X1,Y1 ) 点B(X2,Y2) A到B的方位角为:Tan(Y2-Y1)/(X2-X1)其中(X2-X1)>0时加360°,(X2-X1)<0时加180°
而距离就是((X2-X1)平方+(Y2-Y1)平方)最后开方得到的值即为A到B距离
方位角坐标计算公式
设角为x:tanx=a(对边Y1-Y2)/b(邻边X1-X2)=z,因为a,b,z可求出,利用三角函数tan可求出方位角x,谢谢采纳!
追问
能不能再说的清楚点
回答
问题是你学过三角函数吗?学了就很容易理解了,在三角形abc中,sin x=对边a/斜边c,cosx=邻边b/斜边c,tanx=对边a/邻边b, 其中sinx,c osx,tanx是定值,可以在科学计算器中得到,如果还是不理解的话建议还是先看看这方面的知识吧,希望我的回答对你有所帮助!
请问前辈,坐标反算中求方位角的计算公式
已知A(X1,Y1)、B(X2,Y2)
先求出AB的象限角:
θ=arctan((Y2-Y1)/(X2-X1))
再根据条件将象限角θ转换为方位角α:
当X1-X2>0 , Y1-Y2>0,α=θ;
当X1-X2<0 , Y1-Y2>0,α=θ+180°
当X1-X2<0 , Y1-Y2<0,α=θ+180°
当X1-X2>0 , Y1-Y2<0,α=θ+360°
坐标正算
编辑坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
计算实例:
实例1,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:
XB=XA+ΔXAB (5.1)
YB=YA+ΔYAB (5.2)
式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
由图5.3中,根据三角函数,可写出坐标增量的计算公式为:
ΔXAB=DAB·cosαAB (5.3)
ΔYAB=DAB·sinαAB (5.4)
式中ΔX、ΔY的符号取决于方位角α所在的象限。
实例2. 已知直线B1的边长为125.36m,坐标方位角为211°07′53〃,其中一个端点B的坐标为(1536.86 ,837.54),求直线另一个端点1的坐标X1,Y1。
解: 先代入公式(5.3)、(5.4),求出直线B1的坐标增量:
ΔXB1=DB1·CosαB1=125.36×cos211°07′53〃=-107.31m
ΔYB1=DB1·sinαB1=125.36×sin211°07′53〃〃=-64.81m
然后代入公式(5.1)、(5.2),求出直线另一端点1的坐标:
X1=XB+ΔXB1=1536.86-107.31=1429.55m
Y1=YB+ΔYB1=837.54-64.81=772.73m
坐标增量计算也常使用小型计算器计算,而且非常简单。
如使用fx140等类型的计算器,可使用功能转换键INV和极坐标与直角坐标换算键P→R以及x←→y键。
按键顺序为:
D INV P→R α = 显示ΔX X←→y 显示ΔY。
如上例,按125.36 INV P→R 211°07′53〃= 显示-107.31(ΔXB1);
按x←→y 显示-64.81(ΔYB1)
坐标正算和坐标反算
根据直线的起点和终点的坐标,计算直线的水平距离和坐标方位角的过程叫坐标反算根据直线的起点坐标、直线的水平距离以及坐标方位角来计算终点的坐标的过程叫坐标正算。