基于单片机msp430的点光源跟踪系统设计
- 格式:doc
- 大小:54.03 KB
- 文档页数:6
南京工程学院康尼学院TI杯电子设计竞赛点光源跟踪系统指导老师:学生:目录TI杯电子设计竞赛 (1)一.系统方案 (3)1.1设计要求 (3)1.基本要求 (3)2.发挥部分 (3)1.2方案论证与比较 (4)1.运动控制方案的选择与论证 (4)2.跟踪光源模块 (4)3.模/数转化模块 (4)二.理论分析与计算 (4)2.1舵机的控制方法与参数计算 (4)三.电路与程序设计 (5)3.1系统总体硬件框图 (5)3.2寻光模块电路 (6)3.3程序设计流程图 (7)四.测试方案与测试结果 (7)4.1测试方案 (7)五.结论与设计感想 (8)5.1结论 (8)5.2设计感想 (8)六.参考文献 (8)七.附录 (9)点光源跟踪系统摘要:本点光源跟踪系统以MSP超低功耗单片机系列MSP430F147为核心,完成对光源走直线或者走圆的跟踪等功能。
在机械结构上,我们用2个舵机实现它2个自由度的寻找光源。
采用光电三极管来检测光源的位置,并用激光笔来指向光源。
基于可靠的硬件设计和稳定的软件算法,实现题目要求。
我们更附加了硅光电池给它另外供电。
关键词:MSP430F147 舵机光电三极管光源一.系统方案1.1设计要求1.基本要求(1)光源跟踪系统中的指向激光笔可以通过现场设置参数的方法尽快指向点光源;(2)将激光笔光点调偏离点光源中心30cm时,激光笔能够尽快指向点光源;(3)在激光笔基本对准光源时,以A为圆心,将光源支架沿着圆周缓慢(10~15秒内)平稳移动20º(约60cm),激光笔能够连续跟踪指向LED点光源;2.发挥部分(1)在激光笔基本对准光源时,将光源支架沿着直线LM平稳缓慢(15秒内)移动60cm,激光笔能够连续跟踪指向光源。
(2)将光源支架旋转一个角度β(≤20º),激光笔能够迅速指向光源。
(3)光源跟踪系统检测光源具有自适应性,改变点光源的亮度时(LED驱动电流变化±50mA),能够实现发挥部分(1)的内容;(4)其他。
点光源跟踪系统(B题)方案设计报告摘要:本方案使用TI公司生产的MSP430F247为主控芯片,以TPS61062为核心设计了白光LED驱动电路,应用OPA2335作放大器制作了光源检测电路。
本系统利用以激光笔为中心水平和垂直方向上对称分布的四个光敏三极管为探测端接收光源信号,再利用自适应环境算法、电机分段调速等多种算法实现激光束对白光光源的实时跟踪。
本系统成功完成了基础部分和发挥部分的要求,最终定位误差可控制在1.5cm以内。
关键字: 减速步进电机控制LED电流控制自适应算法一、系统方案的选择1.系统测光部件的选择方案一:以四个光敏电阻为探测端分别对称分布于激光笔水平和垂直方向上,中心处即激光束发光点。
利用光敏电阻在不同光强下电阻值的变化与一个定值电阻串联来输出不同分压值进行判断,当光敏电阻正对光源时电压最大,偏离时电压值线性下降。
方案二:使用四个光敏三极管为测光部件采用方案一的布局方式和工作方式制作探测端,但因三极管有β倍的电流放大作用且光源偏离三极管正对方向时电压值下降的波形斜率更大,所以微小位移的幅值变化更明显。
考虑到二者光敏特性曲线的斜率和幅值变化范围等方面因素,故最终选择方案二。
2.光源跟踪系统转动的控制方案选择方案一:光源跟踪系统由双舵机构成“云台”式结构,机械结构简单、稳定,且舵机在两个方向上都可以做到180°自由的转动,转动速度通过PWM波的占空比控制,但舵机本身控制转角的精度可能使连续小角度定位时产生抖动。
方案二:水平方向利用带减速箱的步进电机控制,垂直方向上利用舵机控制转动。
由于减速箱的使用相当于使步进电机的步长角度变得非常小,使在2米外的光源附近的激光束移动时很平滑,可以做到精确步长控制的连续定位,但缺点是减速箱和电机的完全啮合有一定难度,需要较高的机械加工精度。
综上所述,方案一控制方法最为简易,但控制稳定性可能不足;方案二控制精确度高。
由于本次题目应优先考虑稳定性和准确性,故最终选择方案二。
点光源跟踪系统摘要:本设计以MSP430G2553单片机为控制核心,以恒流LED驱动芯片TPS6102作为LED的驱动,利用D882芯片帮助调节LED电流,设计并制作了能够检测并指示点光源位置的光源跟踪系统。
系统的主电路是由4个光敏三极管组成的传感器接收电路,将该传感器接收电路与步进电机固定,通过单片机控制步进电机旋转来调整传感器接收电路的转动角度,从而跟随点光源的移动而转动。
本文对目标识别与跟踪技术进行了分析,详细讨论了光敏三极管在特定目标光源的扫描、追踪中的具体实现方法以及点光源跟踪系统的软硬件设计,最终实现了点光源跟踪的目标。
ˎthis design with MSP430G2553 microcontroller as control core, and the constant flow LED drive chip TPS6102 as LED drive, using D882 chip help to regulate LED current, designed and produced can detect and instructions point light source the light source position tracking system. The main circuit of the system is composed of four light activated triode sensor receiving circuit, will the sensor receiving circuit and step-motor fixed, through the single-chip microcomputer control stepping motor rotation sensors to adjust a receiving circuit of the rotation Angle, and follow the movement of the point light source and turn. In this paper, the target identification and tracking technology to carry on the analysis, and discusses the light activated triode specific objectives in light scanning, tracking of the specific method and point light source tracking system hardware and software design, and finally achieve the goal of a light track.关键字:MSP430G2553 TPS61062 D882 步进电机光敏三极管一.方案论证与比较1.电机选择模块:方案一:舵机。
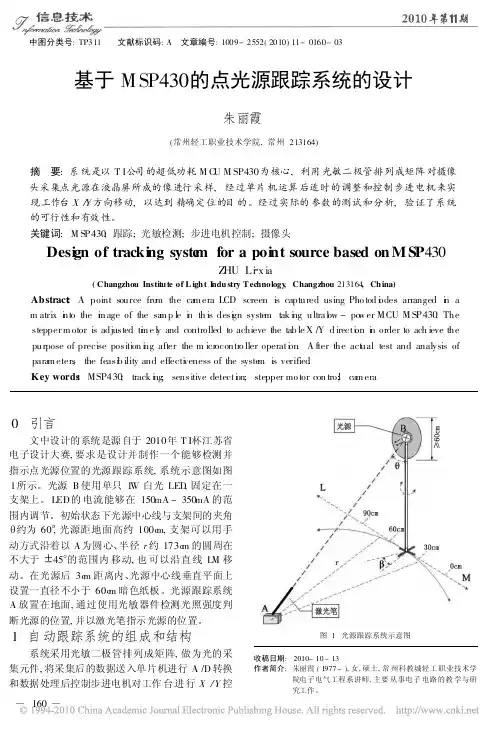
中图分类号:TP311 文献标识码:A 文章编号:1009-2552(2010)11-0160-03基于M SP430的点光源跟踪系统的设计朱丽霞(常州轻工职业技术学院,常州213164)摘 要:系统是以T I公司的超低功耗M C U M SP430为核心,利用光敏二极管排列成矩阵对摄像头采集点光源在液晶屏所成的像进行采样,经过单片机运算后适时的调整和控制步进电机来实现工作台X/Y方向移动,以达到精确定位的目的。
经过实际的参数的测试和分析,验证了系统的可行性和有效性。
关键词:M SP430;跟踪;光敏检测;步进电机控制;摄像头Desi gn of tracki ng syste m for a poi nt source based on M SP430Z HU Li x ia(Changzhou Institu te of L igh t I ndu stry T echnology,Changzhou213164,Ch ina) Abstract:A point source fro m the ca m era LCD screen is captured using Pho tod i o des arranged i n a m atrix i n to the i m age of the sa m p le i n th is desi g n syste m tak i n g ultra l o w-po w er MCU M SP430.The stepper m otor is adjusted ti m e l y and controlled to achieve the tab le X/Y d irecti o n i n order to ach ieve the purpose of precise position i n g after the m icr ocontr o ller operati o n.A fter the act u al test and analysis of para m eters,the feasi b ility and effecti v eness of the syste m is verified.Key words:MSP430;track i n g;sensitive detecti o n;stepper mo tor con tro;l ca m era0 引言文中设计的系统是源自于2010年T I杯江苏省电子设计大赛,要求是设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
基于MSP430的光源追踪系统的设计
张倩
【期刊名称】《《微计算机信息》》
【年(卷),期】2011(027)005
【摘要】本系统以TI公司的超低功耗MSP430处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统.该系统能准确跟踪点光源的位置并用激光笔指示其位置。
硬件系统以MSP430F5438为核心,根据光敏二极管的光电特性检测光源位置,采用步进电机来完成跟踪指示的功能。
软件部分采用基准光照比对的思想编写出源代码来锁定光源位置,实现光源的检测与准确定位。
经过多次测量验证,结果表明所设计的点光源跟踪系统能够自动检测点光源位置并指示。
【总页数】2页(P83-84)
【作者】张倩
【作者单位】西安交通大学西安710018
【正文语种】中文
【中图分类】TP273.5
【相关文献】
1.基于MSP430点光源跟踪系统设计 [J], 杨春杰;亢红波
2.基于MSP430的点光源跟踪系统的设计 [J], 朱丽霞
3.基于MSP430的太阳光源跟踪控制系统设计 [J], 徐艾;廉春原
4.基于MSP430FL49的智能太阳能追踪系统 [J], 胡海燕;翟永前;李春鹏
5.点光源追踪系统设计 [J], 李超;王再明;甘铭;韦稳稳;刘刚
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MSP430的红外光源控制系统及其硬件设计摘要随着集成电路技术、微控制器技术、光谱技术高速发展,基于红外光光谱特性的应用越来越广泛。
红外光源被广泛应用于气体分析、激光测距、机器人定位、遥感、非接触式测温等诸多领域中。
然而由于红外光源通常功率较大,导致制约相关红外光源应用技术的发展。
随着近年来集成电路技术飞跃式的发展,微控制器、大功率场效应管等电子元器件性能得到大幅度提高,使得利用微控制器控制红外光源成为一种主流趋势。
本设计通过利用MSP430单片机以及稳压电压实现红外光源的电压控制以及利用微控制器技术控制场效应管的通断实现红外光源的电子调制。
关键词:红外光源;调制;电压控制;MSP430;MSP430-based infrared light source control system and its hardwaredesignAbstractWith the rapid development of integrated circuit technology, microcontroller technology, and spectroscopy technology, applications based on the spectral characteristics of infrared light are becoming more and more extensive. Infrared light sources are widely used in gas analysis, laser ranging, robot positioning, remote sensing, non-contact temperature measurement and many other fields. However, due to the relatively high power of infrared light sources, the development of related infrared light source application technologies is restricted. With the rapid development of integrated circuit technology in recent years, the performance of electronic components such as microcontrollers and high-power field effect transistors has been greatly improved, making the use of microcontrollers to control infrared light sources a mainstream trend. This design uses the MSP430 MCU and the stabilized voltage to realize the voltage control of the infrared light source and the microcontroller technology to control the on and off of the field effect tube to realize the electronic modulation of the infrared light source.Keywords: Infrared light source; modulation; voltage control; MSP430;目录1前言 (2)1.1本设计的目的及意义 (2)1.2本设计在国内外的发展概况及存在问题 (3)1.3本设计应解决的主要问题 (3)2本设计 (4)2.1系统方案 (4)2.2 硬件设计软件原理 (5)2.3电源电路原理与设计 (6)2.3.1单片机稳压电路设计 (6)2.3.2数控可调电压电路设计 (8)2.3.3数字电位器电路设计 (10)2.4单片机电路原理与设计 (11)2.5 按键电路原理与设计 (13)2.6 串口电路原理与设计 (13)参考文献 (14)谢辞 ...................................................... 错误!未定义书签。
MSP430 单片机的光电跟踪伺服系统研究方案
0 引言
光电跟踪系统是以光电器件(主要是激光器和光电探测器)为基石,将光学
技术、电子/微电子技术和精密机械技术等融为一体,形成具有特定跟踪功能的装置。
目前国内外较先进的光电跟踪系统多以激光测距仪、电视跟踪仪和红外跟
踪仪三位一体为核心构成。
采用机械方法实现跟踪系统控制起来还不太灵
敏。
对于一个光电追踪系统,一般通过目标识别、位置信号检测、位置信号
处理、PID 伺服控制计算、驱动控制、位置反馈、目标不间断跟踪,完成特
定跟踪任务。
而与之配套的目标识别检测处理与PID 伺服控制实现是非常重要的部分,是保证整个系统能否正常工作的关键。
为更好地实现精确的跟踪伺服系统,本方案中使用MSP430 单片机完成对目标定位跟踪的PID 闭环控制,采用S066A 的国产四象限探测对目标进行识别跟踪定位。
MSP430 单片机是美国TI(德州仪器)公司近年推出的16 位高性能混合信号处理器。
由于它具有处理能力强、运算速度快、集成度高、外
部设备丰富、超低功耗等优点,因此在许多领域内都得到了广泛的应用。
S066A 国产四象限探测器光谱响应范围在400~1 100 nm,它的峰值波长为940 nm,它具有较高的灵敏度和精确度,广泛运用于位置检测,光学定位,距离探测等方面。
本研究方案的意义在于一方面对四象限探测器件以及新式低功耗高集成的
微处理器的使用和推广;另一方面探索一种新的机械对准结构设计以及为低成本跟踪系统的研制提供一种可行性方案。
1 总体设计方案。
“点光源跟踪系统”的设计与实现摘要:本点光源跟踪系统由MSP430F5438单片机、bh1750fvi-e光强传感器,LED 灯和云台等组成闭环控制系统,主要模块有LED驱动电路模块、云台控制模块和光能检测模块。
在芯片TPS61062控制的驱动电路作用下产生电流可调的点光源,通过光能检测模块比较各方位光照强度,控制不同继电器的导通从而控制云台向某个方向转动,实现追光功能。
而且,需要校准时也可以用红外进行手动调节。
关键词:MSP430单片机,光能检测,云台控制“The point source Tracking System” 的设计与实现Abstract:The point source tracking system by the MSP430F5438 MCU, bh1750fvi-e light intensity sensors, LED lights and head composed of closed-loop control system, the main module has LED driver circuit module, PTZ control module and the light detection module. TPS61062 chip under the control of drive circuit produces current adjustable light source, light detection module by the parties to place light intensity compared to control conduction of different relays to control head rotation in a certain direction, to achieve functional recovery of light. Moreover, the need for calibration can also be adjusted manually using infrared.Key Words:MSP430 microcontroller, light detection, PTZ control一、方案比较与论证1、LED驱动模块的方案比较与论证方案一:用电源直接在LED的两端加一个电压使LED发光,但这样需要一个可调电压源,通过调节电压来改变LED的电流,从而实现亮度的调节,由于电压的调节很难实现精确的步进,使得这种调节方式线性度很差,给我们监测电流造成了一定的难度,而且这种方案容易损坏LED灯,故未采用此方案。
基于MSP430单片机的室内灯光控制器的设计与制作1.引言室内灯光控制器的设计与制作是一项基于MSP430单片机的项目。
通过该项目,可以实现对室内灯光的控制和调节,提高室内灯光的舒适度和能耗效率。
2.设计概述该室内灯光控制器的设计采用MSP430单片机作为控制核心,通过传感器获取室内环境的亮度和人体活动状态,并根据预设的策略来自动调节灯光的亮度和开关。
同时,用户可以通过设置开关或调节旋钮来手动控制灯光。
3.系统组成该室内灯光控制器系统主要由以下几个部分组成:a)MSP430单片机:作为控制核心,并负责实时监测环境数据和控制灯光。
b)光敏传感器:用于感知室内环境的亮度。
c)人体红外传感器:用于感知人体活动状态,以便根据需要调整灯光亮度。
d)电源:提供系统所需的电能。
e)LED灯:用于室内照明。
f)通信接口:可以与外部设备(如开关、旋钮等)进行通信和交互。
4.系统工作原理系统工作流程如下:a)系统初始化:启动时,进行传感器和通信接口的初始化,并设置初始的灯光亮度。
b)监测环境数据:通过光敏传感器实时监测室内环境的亮度,并将数据传输给MSP430单片机。
c)监测人体活动状态:通过人体红外传感器实时监测人体的活动状态,并将数据传输给MSP430单片机。
d)根据策略调整灯光:MSP430单片机根据传感器数据和预设的策略,自动调整LED灯的亮度。
e)外部控制:用户可以通过设置开关或调节旋钮来手动控制灯光的开关和亮度。
5.制作过程a)硬件搭建:根据设计需求,将MSP430单片机、光敏传感器、人体红外传感器、LED灯和通信接口连接在一起,并进行合适的布局。
b)软件开发:使用MSP430单片机的开发工具进行软件开发,包括初始化、数据处理、策略制定和通信接口的编程。
c)系统调试:完成硬件搭建和软件开发后,进行系统调试,包括传感器数据的准确性验证、应答速度和稳定性的测试等。
d)性能优化:根据实际情况进行性能优化,如灯光控制的精确性、动态响应速度等。
点光源跟踪器【摘要】:本点光源跟踪器主要组成模块有主控制模块、光照检测模块、光驱动模块、继电器控制模块等。
主要芯片是MSP430F4270单片机、白光驱动TPS61062、光敏三极管3DU33、运放TLV2711和云台激光笔等组成的系统。
能够实现跟踪点光源的功能。
在1W的白光LED光照条件下,光能检测模块将光强转换为电压,单片机的SD 对电压采样比较,然后选择输出高电平。
这个高电平会使相应的继电器工作,则云台转动,使光电检测部分指向点电源的正确位置。
一、系统方案方案一:采用目前比较通用的51系列单片机。
此单片机的运算能力强,软件编程灵活,自由度大。
虽然该系统采用单片机为核心,能够实现对外围电路的智能控制部件。
由于光强度的变化是微小的变化,单片机为达到设计精度的要求,外围电路必须加上12位的A/D,这使得整个系统硬件电路变得复杂,而且12位的A/D器件价格较高,使得系统的性价比偏低。
方案二:采用TI的16位MSP430F4270单片机。
此单片机功能较强、兼容性好、性价比高;易扩展、可靠性、功耗小以及具有较高的数据处理和运算能力,系统时钟频率高,运行速度快,而且由于MSP430F5438单片机内部集成了16位的SD模/数转换器,不需外加模/数转换器,就可以很精确地将光强度的变化转换为电压值。
通过采样取样,结合内部A/D,构成闭环反馈调整控制。
此种方案既能实现智能化的特点,简化硬件电路,提高测量精度,同时也能利用软件对测量误差进行补偿,这给调试、维护和功能的扩展,性能的提高,带来了极大的方便。
鉴于上面考虑,我们采用第二个方案。
根据题目要求系统框图如下:图1系统框图系统工作原理:系统是由主控制模块、光照检测模块、光驱动模块、继电器控制模块等组成。
打开电源,操作单片机使白光LED 在300mA 下工作,用两对光敏三极管分别监测左右,上下的光强信号。
光电采集模块将光度强弱信号转换为电压值(三极管感应到的光度越强则采样的电压会越大),然后单片机16位的SD 对其中一对电压采样并比较两值的大小,当这两个电压值之差超过一定的门限,这时单片机输出高低电平,控制继电器的工作,使云台向光度强的方向运动。
题目光源自动跟踪系统组别第三组姓名农世安、黄勇深、廖晓系(院)信息工程系班级 11应用电子(3+2)指导教师龙祖连、倪杰、张存吉二O一二年九月三日光源自动跟踪系统要摘本设计以TI公司提供的16位超低功耗、高性能嵌入式微控制器MSP430为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统。
循迹小车沿半径r =80cm的半圆黑色循迹线(线宽20mm)自C点运动到D点,在D点停留5S后关掉LED灯并自动返回C点,表示一天周期的结束。
放置在地面的光源跟踪系统,通过运用光敏器件的检测、传感器、AT89S52单片机的强大功能及相关外围电路设计产生控制信号传递给步进电机,使步进电机带动激光笔进行左、右等方向进行光源的实时检测及精确的跟踪。
本文着重讨论电机控制与光源检测定位方法。
关键字光源检测及跟踪光敏器件步进电机目录一、引言 (4)任务与要求 (4)二、方案的选择与论证 (5)1、微控制器模块的选择与论证 (6)2、光敏元器件的选择与论证 (7)3、电机的选择与论证 (8)4、电机驱动模块的选择与论证 (9)5、显示模块的选择与论证 (9)6、方案确认 (10)7、方案论证 (10)三、系统总体设置 (11)1、系统硬件流程图 (11)2、系统软件流程图 (12)四、系统单元设计 (14)1、单片机最小系统 (14)2、电源电路 (15)3、黑白线检测模块 (16)4、电机驱动模块 (16)五、系统总体测试 (17)六、总结 (17)一、引言.任务与要求:设计并制作一个能够检测并指示点光源位置的模拟光伏发电太阳光自动跟踪系统,系统示意图如图1所示。
光源B使用单只1W白光LED(不得使用任何聚光装置),固定在一可调速循迹小车上,循迹小车沿半径r =80cm 的半圆黑色循迹线(线宽20mm)自C点运动到D点,在D 点停留5S后关掉LED灯并自动返回C点,表示一天周期的结束。
循迹小车的速度以自C点运动到D点的时间为20~50S 可调节。
点光源跟踪系统【摘要】:本系统设计以MSP430F169微处理器为控制器点光源自动跟踪系统,点光源跟踪系统由光源检测控制和点动光源两大部分组成。
光源检测控制通过单片机控制两个步进电机,实现激光笔左右上下两个方向运动,可实现精准跟踪光源,点动光源用恒流源控制1W LED发光,光敏三极管构成见检测光源位置电路。
系统使用NOKIA3510彩色液晶显示,不仅美观,而且菜单显示使系统可视化。
本系统结构简单,功能强大,系统稳定。
关键词:步进电机MSP430F169 NOKIA3510 光敏三极管一系统整体方案确立与单元模块方案论证及比较本题任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统。
自动跟踪系统要实现检测光源和跟踪光源,通过光敏器件检测光照强度判断光源的位置,辅以微处理器控制电机,电机控制激光笔的左右上下运动来跟踪光源。
有以下两种总的方案可供选择:(1)电机的选择方案论证方案一:实用云台机构。
利用全方位云台内部的两个电机,分别控制激光笔上下、左右转动;这种方案的优点是控制起来较比较方便,机械性能较好,但是市场上云台价格较贵,由于云台通过同步电机实现转动,运动惯性比较大,不易控制。
方案二:控制步进电机。
利用两个步进电机,分别控制激光笔上下、左右向的转动;步进电机控制方便,驱动电路设计容易。
这种方案的优点是经济。
综上所述:考虑到激光笔上下左右运动的角度非常微小,而且步进电机便宜,故选用方案二。
(2)电机驱动模块选择方案一:采用专用芯片L298N作为电机驱动芯片。
L298N是一个具有高电压大电流的全桥驱动芯片,它工作频率高,一片L298N可以控制1个步进电机,而且还带有控制使能端。
用该芯片作为电机驱动,操作方便,稳定性好,性能优良。
方案二:用分立元件构成驱动电路。
由分立元件构成电机驱动电路,结构简单,价格低廉,在实际应用中应用广泛。
但是这种电路工作性能不够稳定。
方案三:用高耐压、大电流达林顿陈列—ULN2003做驱动电路。
基于MSP430单片机的智能照明控制系统的设计摘要:为了解决生活中“长明灯”的浪费现象,设计了低功耗、低成本的智能照明系统。
采用单片机MSP430F149为主控制器,以热释电红外传感器来探测室内是否有人,并根据光照度传感器探测的环境亮度,来实时调节和控制室内LED的照明情况,最终达到智能照明以及节能的效果。
关键词:智能照明;MSP430F149;传感器随着经济的发展和社会的进步,生活中的照明系统也日趋智能化和节能化。
传统的照明只有开、关,无逻辑时序及亮、暗调光控制,因此主要依赖于人们的主动性。
然而智能照明系统主要在很大一定程度上尽可能的满足人们的生活、工作、学习的需求,它主要是通过主电源经过可编程控制后实现,LED照明系统全自动的实现人们预先设定的适合的照明效果,从而使照明更加智能化及人性化。
另外智能照明还有减少不必要的耗电进而达到良好的节约资源的效果,它主要通过充分利用大自然的光作为光源,以人工光作为补偿,结合室内有无人员情况,在室内光不足以满足人们视觉需要时才启用照明灯,经使用证明此种方式节能可达30%上下,可见效果明显。
通过智能可以让室内照明减少过多的长明灯,也避免了很大的资源浪费。
1系统设计系统由红外探测模块、单片机控制模块、照度探测模块、驱动模块等构成(见图1)。
智能照明控制器先利用红外探测模块采集信息传送给主控制器单片机来判断室内是否有人,进而去控制照明驱动电路的开关是否闭合,再根据光照度探测模块采集到的信号送往单片机,单片机根据此信号去控制输出PWM波的占空比,进而调节照明灯的光照强度来达到恒光照照明。
2 硬件部分2.1中心控制模块在单片机控制器的选择上,本文采用TI公司生产的MSP430系列单片机中的MSP430F149。
MSP430系列单片机是美国德州仪器公司(WI)近几年开发的新一代单片机,该单片机在设计上采用了全新的概念,其功能远超过其他系列单片机的功能故称之为混合型单片机。
全国大学生电子设计竞赛2010年TI杯模拟电子系统专题邀请赛设计报告参赛题:点光源跟踪系统(B题)参赛学校:黄冈师范学院参赛成员:马沁、王亮、赵娟点光源跟踪系统(B题)摘要本设计主要以TI公司的超低功耗MCUMSP430处理器为核心,控制步进电机带动激光笔实现白光LED点光源的跟踪,并设计制作了一个点光源跟踪的系统,达到了题目规定的基本和发挥部分的要求,效果较好。
该系统由430单片机最小系统、点光源检测、步进电机驱动等电路组成,利用八个光电二极管实现点光源强度和移动方向的检测,通过信号放大和处理,送单片机内部八路AD采样电路,单片机将采样结果经过两次数字程序滤波后,进行分析和处理,控制步进电机运转的步距和方向,从而达到点光源的精确跟踪。
光源偏离方向检测和光强度检测采用八个廉价的光电传感器,并将它们分为两组,采用对两组传感器采集的数据分别求平均值的算法,实现对环境光线的滤除和光源偏离方向的判断,算法简单,合理高效。
同时增加了电机转动角度的测量和显示功能。
关键字:单片机LED点光源光敏二极管步进电机一、系统设计方案、控制算法选择与论证1.1 系统设计方案设想与论证1.1.1测光和运动方向判断电路的比较与论证为了选择符合设计系统所需的光电传感元件,以及能更好的实现光源跟踪功能,通过对常见半导体光敏元件进行试验和测试比较,结果如下表:感光元件都有共同点,即将光信号转换为电信号。
但在不同的工作环境要求中,各自都存在优缺点,如就检测距离而言,红外接收管探测距离远,但电压变化率相对较大。
而光敏电阻探测距离近,电压变化相对平稳等。
本次设计要求探测距离在100cm 处,且能准确快速探测到光源,根据以上器件比较,光敏二极管具有较宽的检测范围,红外接收管具有较强的方向性和抗干扰能力,为满足设计需要和实现准确定位功能,选择光敏二极管和红外接收管两者优点相结合的方式是最佳选择。
1.1.2 光源跟踪方案选择方案一:直流电机带动激光笔。
点光源跟踪系统目录1.【摘要】 (1)2.系统整体方案确立 (2)3.方案设计论证与比较 (2)3.1方案设计 (2)3.2方案论证与比较 (2)3.2.1控制核心的选择与比较 (2)3.2.2恒流源的选择与比较 (3)3.2.3光敏器件的选择与比较 (3)4.系统的建立 (4)4.1系统构建框图 (4)4.2硬件电路的制作 (4)4.2.1可调恒流源电路 (4)4.2.2光源检测电路 (5)4.2.3 msp430最小系统 (6)4.2.4 JS-8580-V6C驱动步进电机模 (6)4.3程序设计 (7)4.3.1程序系统框图 (7)4.3.2程序代码 (8)5.系统调试 (9)5.1调试仪器 (9)5.2调试结果 (9)5.2.1 恒流源数据测试 (9)5.2.2系统测试 (10)点光源跟踪系统1.【摘要】本系统设计是由MSP430F149单片机为控制核心,由恒流源控制1w的大功率LED做点动光源。
以光敏电阻作为光源检测传感器,用步进电机来自由转动带动激光笔跟踪点光源的自动跟踪系统. 该系统由430单片机最小系统、点光源检测、步进电机驱动等电路组成,利用三个光敏电阻实现点光源强度和移动方向的检测,通过信号放大和处理,送入单片机内部电路,单片机将采样结果进行分析和处理,控制步进电机运转的步距和方向,从而达到点光源的精确跟踪。
关键词:MSP430;恒流源;步进电机;光敏电阻。
点光源跟踪系统2.系统整体方案确立作品以1w白光LED作为光源,固定在一支架上,且LED的电流可调范围为150mA到350mA,在一定的角度,范围内移动支架,确保跟踪系统中的指向激光笔可以尽快的指向光源。
3.方案设计论证与比较3.1方案设计由于要以1w的白光LED作为光源,且电流调节范围有限制,所以需要选择一个好的恒流源达到要求,其次在感光系统中,要做到精准的跟踪和定位光源,因此光电传感器的选择也很重要。
在这两者的设计中,有以下几种方案。
点光源跟踪系统的研究
[摘要] 本系统采用MSP430F2274作为控制核心,通过键盘修改参数,全面实现了题目中的基本要求和发挥部分要求。
建立二维坐标,使用两个舵机分别控制随动系统垂直方向和水平方向,使得激光笔能够更加快速准确的指向光源,尤其是当光源沿直线运动时。
当光源移动30cm时,随动系统能够快速自动找到光源。
[关键词] MSP430 随动系统实时跟踪伺服电机
一、方案比较与论证
本设计要求实现随动系统能够定点找到光源,随动追踪光源,光源沿弧线和直线运动时均能够找到光源等。
根据题目要求,本系统由单片机、LED光源、捕获光强、放大电路、舵机等五个模块构成,各模块经过多个方案的比较与论证,最终提出了使系统最优化的整个系统方案。
系统总体框图如图B-1所示。
1、捕获光强系统模块
捕获光强系统模块主要由光敏三极管、激光笔组成。
方案一:一维随动系统,采用一个光敏三极管和一个激光笔的方式。
如图B-2所示。
G为光敏三极管
J为激光笔
光敏三极管G位于激光笔J的上方,两者在垂直方向处于同一直线上,以光敏三极管为中心可水平转动。
(剩余2633字)
阅读整篇文章。
点光源跟踪系统摘要:本文设计了一个基于低功耗单片机MSP430F2618的光源跟踪系统,系统分为可移动光源、光信号接收及处理、亮斑位置调整三个主模块。
可移动光源利用1W白光LED和驱动芯片TPS61062发出亮度可调的光信号;光信号接收及处理模块利用光敏三极管并经过信号调理电路,完成光信号的接收和处理;亮斑位置调整模块由步进电机及其驱动电路组成,是调整亮斑位置的执行电路,MCU对采集的光信号进行处理,并运用比例积分(PI)控制算法与脉宽调制(PWM)完成对电机的控制,从而实现激光亮斑对可移动光源位置的跟踪。
此外,该系统还包含电源、声光报警、液晶显示、拨码开关等模块,人机交互界面友好,使用方便。
关键字: PI控制算法 PWM控制 LED光源步进电机1一、系统方案1. 整体方案选择根据题目要求,此光源跟踪系统可按功能划分为可移动光源、光信号接收及处理、亮斑位置调整三个主模块。
利用光敏三极管将可移动光源发出的光信号转化为电信号后,由MCU对采集的信号进行计算处理,并控制电机和舵机以调整激光笔的角度,实现激光亮斑对可移动光源的跟踪。
系统整体框图如下图所示:2.主控制器的论证与选择方案一:采用FPGA作为系统的主控制器,对光信号接收及处理系统产生的电信号进行处理,并控制电机运动。
FPGA速度快,但成本偏高,算术运算能力不强。
方案二:采用MSP430F2618单片机作为控制核心。
该单片机拥有包括ADC 在内的丰富外设资源,且算术运算能力较强,软件编程灵活,可以实现各种灵活的运动控制。
考虑到本系统对速度要求不高,最终采用了方案二。
3. 光信号接收及处理模块的论证与选择此模块的主要功能是利用三组光敏三极管,把可移动光源发出的光信号转化为电信号,其中两组位于水平面,一组位于竖直面,且每组的两个光敏三极管关于中心对称。
要实现此模块功能,有以下可选方案:方案一:利用比较器,并设置门槛电压为0V,输入信号为每组的两个光敏三极管的分压。
基于msp430的点光源跟踪系统设计
周小军 何志龙 武小栋
摘要 本设计采用MSP430F149 单片机作为整个系统的控制核心,利用4个光敏三极管来接收点光源发出的光并将检测到的信号放大后传给控制器MSP430F149单片机,经过单片机的运算和处理来确定点光源的位置,并将运算的控制信号传给两台步进电机,使其跟随点光源运动。
当水平方向上的2路光敏三极管测量数值相对接近,同时竖直方向上的2路光敏三极管测量数值也相对接近时,位于传感器中间的激光笔将精确的指向点光源。
关键词: MSP430 点光源 跟踪 传感器
1 方案设计与论证
根据题目的要求,系统的设计可分为控制器(msp430)模块,电机驱动模块,点光源检测模块,液晶显示模块,LED 驱动模块组成。
系统设计总框图如图1:
1.1主控芯片的选择 方案一:采用传统的51单片机,运用比较广泛,上手比较快。
但是本系统的程序量比较大,内部资源要求比较丰富,51单片机难以胜任这些功能。
光敏三极管
键盘
MSP430F149 1602液晶
纵轴电机 横轴电机 图1 系统设计总框图
方案二:采用MSP430F149低功耗单片机,其I/O口资源丰富,有12位AD转换、16位定时器、精密的比较器等,信息处理功能强大,能够很好的实现系统的要求。
故选择此方案。
1.2电动机的选择
本系统电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:
方案一:步进电机。
在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
每给一次脉冲信号,电机能够转过一个步距角。
方案二:直流减速电机。
此电机在正常通电状态下,转速平稳,角度的变化也近乎连续,控制简单方便。
根据设计的要求可知,直流减速电机的速度不容易控制,而步进电机的控制和实现相对简单一些。
因而选用方案一。
1.3电动机驱动方案的选择
本系统中选的是步进电机,步进电机驱动有一下三种方案可选择:
方案一:采用功率三极管作为功率放大器的控制步进电机。
线性型驱动的电路结构和原理简单,加速能力强,但是电路比较复杂。
方案二:采用由达林顿晶体管阵列ULN2003。
用单片机控制达林顿管使之工作在占空比可调的开关状态下,精确调整电动机转速。
单驱动能力比较弱。
方案三:采用恒压桥式驱动芯片L298N。
驱动能力强,电路简单,使用方便。
故选择此方案。
1.4传感器的选择
本系统的传感器主要是检测光照度,可考虑的传感器如下列方案:
方案一:光敏电阻。
从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。
方案二:光敏二极管。
光敏二极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。
方案三:光敏三极管。
光敏三极管灵敏度远高于光电池,但受外界环境影响飘动比较严重,用两个光敏三极管采集点光源两侧的光强差,可以有效消除外界环境光的干扰.光敏三极管接收面不仅小而且是一个有聚光功能的透镜,更容易确定点光源的位置。
用四个光敏三极管组成四象限感光面,上下左右各一个光敏三极管。
经实践测定,光敏二级管与光敏三极管满足要求,但在反映速度,及变化的灵敏、快速性方面,光敏三极管更胜一筹,故传感器选择方案三。
2硬件电路的设计
2.1 1W LED驱动电路
用LM317三端可调式集成稳压器,可以通过简单的电路连接得到恒流源I=1.25/R +I
(I=50υA),可移动过精密电位器调节R2从而改变I,得到相应的电流范围用来驱动
大功率LED灯。
电路如图2所示:
图2 1W LED驱动电路
2.2信号检测电路
3DU33采集到光信号后,使整个电路导通,再通过运算放大器将微弱的电流信号放大,从而使单片机MSP430F149更好的处理信号。
整体电路如图3所示:
图3 信号采集电路
2.3步进电机驱动电路设计
为了达到较好的跟踪电光源的目的,本设计采用两个步进电机来配合跟踪系统工作。
电机驱动电路如图4所示
2.4键盘设计 本系统中键盘的作用是调整。
如果点光源不在光敏三极管检测的范围就不能检测点光源的光照,所以需要手动调整步进电机使其寻找到点光源。
键盘就在这个过程中应用。
键盘电路如图5所示 图5 键盘电路 图4 步进电机驱动电路
3 系统程序设计
3.1 跟踪系统流程图 否 是
开始
键2
键1 键4 初始化
模式选择
键3 键5
模式1 反转 停止 正转 模式2
光源检测
驱动电机
追踪测量
是否光强最大
保存数据并停止测量
图6 系统总体流程图
3.2 软件设计
本系统软件设计部分主要包括按键选择部分,ADC采集转换部分,液晶驱动部分,执行部分。
按键选择部分,设置P2.0~P2.4下降沿中断。
P2.0键按下后选择模式1即电光源圆周运动模式,P2.1控制电机正转,P2.2控制电机反转,P2.3使电机停止转动,P2.4选择模式2即点光源直线运动模式。
其中P2.1、P2.2、P2.3三个按键用于调整,当电光源不在测量范围时,可以按键控制使电机转动到可测量区域。
ADC采集转换部分,设置P6.0~P6.3为光敏三极管信号输入端口,经过单片机ADC12算法处理,把处理结果进行比较,并把部分结果在液晶上显示。
液晶驱动部分占用P4全部端口和P3部分端口。
此部分程序用于液晶的初始化以及控制液晶显示。
执行部分,通过比较经过水平方向两个光敏三极管电流的大小,确定纵轴电机的转动方向,通过比较经过竖直方向两个光敏三极管电流的大小,确定横轴电机的转动方向。
当水平、竖直两个电流值之差在一确定范围时,电机停止转动,此时激光笔指向电光源所在位置。
此外,电机运行状态会在液晶上显示。
4结语
本设计基本上能按照要求对点光源进行跟踪。
单片机通过对外部光电信号的采样转换比较得到电机运行指令。
可根据控制系统的追踪时间要求来改变脉冲的频率,以此来改变步进电机的旋转速度带动工作台进行实时跟踪, 在电路中增加了手动校准电路,可以使光敏三极管快速的寻找到点光源的大概位置,然后实施自动跟踪功能。
设计过程中我们碰到的最大的问题是硬件部分,最终在仔细的调试过程中发现了问题,并加以解决。
5参考文献:
[1]全国大学生电子设计大赛获奖作品选编.北京理工大学出版社2005
[2] MSP430单片机常用模块与综合系统实例精讲.电子工业大学出版社2005
[3]MSP430系列16位超低功耗单片机原理与应用.清华大学出版社出版2003 6附录
所用核心器件:
MSP430单片机
两相混合式步进电机两个
光敏三极管4个
1602液晶1块
LM317 1个
LM324 两个
L298N 1个。