飞控系统与仿真
- 格式:pptx
- 大小:9.18 MB
- 文档页数:45
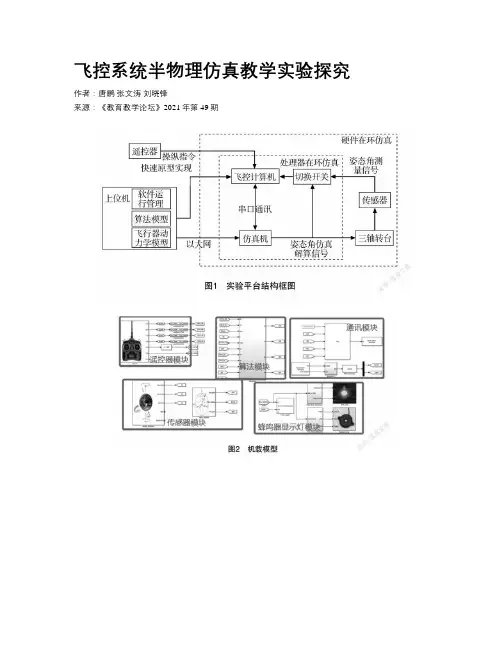
飞控系统半物理仿真教学实验探究作者:唐鹏张文涛刘晓锋来源:《教育教学论坛》2021年第49期[摘要] 目前,飞行控制系统教学实验主要以Matlab/Simulink建模仿真为主,传统手工编码设计控制器软件的设计方法面临教学难度大、调试过程复杂等问题。
基于快速原型技术,引入三轴转台、飞控计算机等硬件设备,设计了半物理仿真教学实验。
教学结果表明,教学实验能够帮助学生理解数学仿真和实际飞行之间如操纵指令的延迟、传感器特性干扰、离散域和连续域之间的差异,了解飞行器的姿态运动及地面实验的方法,有利于提高学生的实践能力和综合解决问题的能力。
[关键词] 飞行控制系统;基于模型;半物理仿真;教学实验[基金项目] 2020年度北京航空航天大学本科生教学改革项目“飞行器适航技术专业课程设计教学实践”[作者简介] 唐鹏(1980—),男,北京人,博士,北京航空航天大学交通科学与工程学院实验师,主要从事飞行控制与试飞研究;张文涛(1995—),男,河南焦作人,北京航空航天大学交通科学与工程学院2019级交通运输工程专业硕士研究生,研究方向为无人机飞行控制系统半物理仿真和地面驗证;刘晓锋(1979—),男,辽宁凌源人,博士,北京航空航天大学交通科学与工程学院副教授(通信作者),主要从事系统建模与控制飞行研究。
[中图分类号] C229.29 [文献标识码] A [文章编号] 1674-9324(2021)49-0082-04 [收稿日期] 2021-04-20一、引言飞行控制系统的开发遵循设计—实现—验证的V模式,地面设计与试验主要包括以下步骤:动力学建模、控制器设计、数字仿真验证、控制算法/软件实现、半物理仿真验证[1-3]。
在传统的飞控系统设计中,完成飞行控制律设计和数字仿真验证后,需要根据飞控硬件系统开展机载代码编写、测试。
而目前基于模型的飞控系统开发技术方兴未艾,在飞控工程师基于Matlab/Simulink设计平台完成控制律设计后,可以直接生成机载代码,大幅提升飞控系统研发效率。
直升机飞行控制系统动态建模与仿真一、引言直升机是一种垂直起降的飞行器,在现代社会中扮演着重要的角色,广泛应用于军事、民用、医疗、物流等领域。
其飞行控制系统的设计和开发具有十分重要的意义。
直升机的飞行控制系统包括机械设计部分和电子控制部分。
机械设计部分主要包括主旋翼叶片、尾旋翼、机身结构等,而电子控制部分则主要包括传感器、执行器、控制器等。
其中,飞行控制系统的设计不仅需要考虑直升机的稳定性、可靠性和飞行性能等问题,还需要考虑到其复杂的结构和多变的工作环境。
本文旨在通过动态建模和仿真的方法,分析直升机飞行控制系统的工作原理和控制机理,进而提高其稳定性和可靠性,为直升机的应用提供技术支撑。
二、直升机的基本结构直升机是一种可以垂直起降的旋翼飞行器,它具有以下基本结构:(1)旋翼系统旋翼系统是直升机的主要部分,包括主旋翼和尾旋翼。
主旋翼通过旋转产生升力和推力,使直升机获得升力和前进动力。
尾旋翼主要用于平衡机身的姿态和控制机身的方向。
(2)机身结构机身结构是直升机的框架,承担着旋翼系统和发动机的重量。
机身结构的主要材料是铝合金、钛合金、复合材料等。
(3)发动机发动机是直升机的动力系统,一般采用燃气轮机或柴油机。
发动机的功率主要决定着直升机的飞行性能和载荷能力。
(4)电子控制装置电子控制装置是直升机的核心部件,主要负责控制旋翼系统的运动和控制机身的姿态。
电子控制装置包括传感器、执行器和控制器等。
三、直升机控制系统的组成直升机的控制系统由传感器、执行器和控制器三部分组成。
(1)传感器传感器是直升机控制系统的输入部分,可以测量飞机的姿态、速度、位置和加速度等参数。
传感器的主要类型包括角速度陀螺仪、加速度计、地磁传感器、气压计等。
(2)执行器执行器是直升机控制系统的输出部分,根据控制器的指令对飞机进行姿态控制和位置控制。
执行器的主要类型包括电动舵机、平衡阀、电动水平面和液压阀等。
(3)控制器控制器是直升机控制系统的核心部件,它接收传感器的信号,计算控制指令,并将其发送给执行器进行控制。

飞行控制仿真实验报告 Coca-cola standardization office【ZZ5AB-ZZSYT-ZZ2C-ZZ682T-ZZT18】飞行控制仿真实验报告学号:姓名:专业:指导教师:2016年6月8日目录1.实验内容俯仰操纵实验要求控制俯仰角保持在10度,并记录飞机的状态数据,绘制俯仰角变化曲线、滚转角变化曲线、速度变化曲线、航向变化曲线以及飞机运动轨迹,完成试验后分析仿真结果。
同时,并分析俯仰角能够稳定的原因。
俯仰控制原理俯仰角是由升降舵控制的,升降舵偏角的变化会产生对应的俯仰力矩,俯仰力矩会产生相应的机体角速度。
正是因为机体角速度的存在,才会使得俯仰角发生变化,对于常规飞行器而言,一定的操作杆行程会稳定在一个确定的姿态角。
于是要想使得俯仰角能够稳定的住,那么最终要使得机体角速度为0才行,这就需要引入反馈的概念,由飞机的动力学方程可以看出,姿态角作为反馈信号,反馈给了机体角速度,这样就形成一个耦合回路,保证了俯仰角控制的稳定。
滚转操纵实验要求控制滚转角保持在30度,并记录飞机的状态数据,绘制俯仰角变化曲线、滚转角变化曲线、速度变化曲线、航向变化曲线以及飞机运动轨迹,完成试验后分析仿真结果。
同时,并分析滚转角能够稳定的原因。
滚转操纵原理滚转角的控制由副翼实现,同时方向舵偏角也会引起一定的滚转角,但是方向舵引起的滚转是较小的。
滚转通道和偏航通道是相互耦合的。
左右副翼不同极性的偏转会产生不同极性的滚转转矩,于是会产生不同极性的机体角速度。
正是由于机体角速度的存在,产生了对应的滚转角速度,最终引起了一定的滚转角。
如俯仰角一样,对于常规飞机而言,一定的副翼偏转角会使得滚转角稳定在一个确定的值。
同样,要想使得滚转角可以稳定的住,也需要将滚转角和滚转角速度反馈回机体角速度,通过形成一个闭环控制才能使得飞机的滚转角稳定住。
航向操纵实验要求控制航向角保持在100度,并记录飞机的状态数据,绘制俯仰角变化曲线、滚转角变化曲线、速度变化曲线、航向变化曲线以及飞机运动轨迹,完成试验后分析仿真结果。
无人机飞行控制系统的设计与仿真1.引言无人机作为一种高效、灵活且具有广泛应用前景的航空器,正逐渐在军事、民用、科研等领域发挥重要作用。
而无人机的飞行控制系统是确保无人机能够稳定、准确地执行任务的重要核心技术之一。
本文将探讨无人机飞行控制系统的设计与仿真问题。
2.无人机飞行控制系统概述无人机飞行控制系统包括传感器、数据处理单元、执行器等多个组成部分。
传感器用于感知环境和飞行状态,数据处理单元负责实时处理传感器数据以及运算控制指令,执行器则负责控制无人机的各个设备以实现飞行控制。
无人机飞行控制系统的设计目标是保证无人机在各种复杂环境中的稳定性、可控性和安全性。
3.传感器选择与布局传感器对于无人机飞行控制系统至关重要,不仅能提供即时的环境信息,还能感知无人机的飞行状态。
在选择传感器时,需要考虑其精度、响应速度、可靠性等因素,并根据无人机的具体任务和应用场景进行布局。
例如,用于测量姿态的加速度计和陀螺仪通常布置在无人机的重心附近,以实时感知无人机的姿态变化。
4.数据处理与控制算法传感器采集的数据经过数据处理单元进行滤波、校准等处理,以获得更准确、可靠的飞行状态信息。
在控制算法方面,常用的方法有PID控制器、模糊控制、自适应控制等。
根据无人机的任务特点和运行环境,选择合适的控制算法,并通过仿真测试进行参数优化和系统性能评估。
5.执行器选型与控制执行器是无人机飞行控制系统中负责转化电信号为机械能的装置,常见的执行器有电机、舵机、液压缸等。
在无人机设计中,需要根据无人机的重量、飞行速度等因素选择合适的执行器,并通过控制信号实现对无人机各部件的精确控制。
此外,还需要考虑执行器的能耗、寿命等因素,在设计中进行综合权衡。
6.飞行控制系统的仿真为了评估无人机飞行控制系统的性能和可靠性,采用仿真是一种经济、高效的方法。
通过建立系统动力学模型、传感器模型和环境模型等,可以在计算机上进行虚拟飞行实验,模拟不同飞行场景下的飞行控制过程。
飞行器控制系统设计与模拟飞行器控制系统是航空领域中至关重要的一部分,它负责通过传感器和执行器实现对飞行器的控制和导航。
在本文中,将介绍飞行器控制系统的设计原理和模拟方法,以及在实际应用中的一些挑战和解决方案。
一、飞行器控制系统设计原理飞行器控制系统的设计原理可以分为三个主要部分:传感器、控制器和执行器。
1. 传感器传感器是飞行器系统中的关键组成部分,它通过感知环境中的物理量,并将其转化为电信号,以提供给控制器进行处理。
常见的飞行器传感器包括加速度计、陀螺仪、气压计、磁力计等。
加速度计用于测量线性加速度,可以帮助判断飞行器的姿态和运动状态;陀螺仪用于测量角速度,可以帮助判断飞行器的转动状态;气压计用于测量气压,可以帮助判断飞行器的高度;磁力计用于测量磁场强度,可以帮助判断飞行器的方向。
传感器的准确性对于飞行器的控制至关重要,因此在设计过程中需考虑噪声抑制和校准等因素。
2. 控制器控制器是飞行器控制系统的核心部分,它根据传感器提供的信息和预设的控制算法,通过计算和判断来生成相应的控制信号,以实现对飞行器的姿态和位置的控制。
常见的飞行器控制算法包括PID控制算法、状态反馈控制算法和模糊控制算法等。
PID控制算法是一种经典的控制算法,通过比较目标值和实际值的差异,根据比例、积分和微分三个参数来调整控制信号的大小。
状态反馈控制算法基于飞行器的数学模型,通过估计飞行器的状态变量并根据目标值进行调整。
模糊控制算法是一种基于模糊逻辑的控制算法,可以应对非线性和不确定性的飞行器控制问题。
3. 执行器执行器是控制器输出的信号在物理上作用于飞行器的装置,用于操纵飞行器的姿态和位置。
常见的飞行器执行器包括电动机、伺服阀和舵面等。
电动机通常用于控制飞行器的推力和动力系统;伺服阀用于控制飞行器的液压系统,如液压舵面和液压地平线;舵面用于控制飞行器的姿态变化,如副翼、升降舵和方向舵等。
执行器的稳定性和响应速度对于飞行器的控制效果至关重要,因此在设计过程中需考虑动力和机械的匹配和协调等因素。
小型无人机飞控系统设计随着无人机技术的迅速发展,小型无人机在各个领域的应用越来越广泛。
然而,要实现小型无人机的稳定飞行并不容易,这需要设计一套精良的飞控系统。
本文将详细探讨小型无人机飞控系统的设计,旨在实现无人机的稳定飞行。
在小型无人机飞控系统的设计中,首先需要明确设计目标。
飞控系统的目标是根据无人机的实时状态和外部环境因素,通过调整各种参数,保证无人机的稳定飞行。
为了达到这一目标,我们需要选择合适的技术方案。
目前,应用于小型无人机飞控系统的技术主要包括:比例-积分-微分(PID)控制、卡尔曼滤波、神经网络等。
其中,PID控制是一种经典的控制算法,它通过调节系统的误差信号,实现对无人机姿态、位置等参数的精确控制。
而卡尔曼滤波则是一种基于统计学的控制算法,它通过预测无人机的状态,实现对无人机状态的精确估计。
神经网络作为一种人工智能技术,通过训练大量数据,实现对无人机状态的智能预测和控制。
在选择技术方案后,我们需要使用编程语言编写飞控系统的程序。
常用的编程语言包括C++、Python等。
在编写程序的过程中,我们需要将各种算法和控制器集成到程序中,以便实现对无人机状态的实时监控和调整。
调试和测试是飞控系统设计的重要环节。
在调试过程中,我们需要不断调整各种参数,以保证系统达到稳定状态。
同时,我们还需要进行各种测试,包括系统功能测试、性能测试、安全测试等,以确保飞控系统的可靠性和稳定性。
在进行系统仿真的过程中,我们首先需要建立小型无人机飞控系统的数学模型。
数学模型可以帮助我们更好地理解无人机的动态特性和控制系统的行为。
然后,我们选择合适的仿真工具,如MATLAB、Simulink 等,根据数学模型建立仿真实验。
在仿真实验中,我们可以通过改变不同的参数,如控制器的增益、滤波器的参数等,来观察无人机飞行的表现。
通过对比不同参数下的仿真结果,我们可以对飞控系统的性能进行分析和评估,找出最优的参数设置。
同时,仿真实验也能够帮助我们预测在实际环境中无人机飞行的表现,为后续的实际飞行实验提供参考。
基于SCADE的自动飞行控制系统设计与仿真王禹;曹义华【摘要】飞机飞行的安全性是航空业发展的重要课题,自动飞行控制是降低驾驶员工作负荷,提高飞行安全性的有效途径。
利用高安全性应用开发环境SCADE,综合考虑飞机运动安全特性,通过数据流程图,平面状态以及安全状态机的建模方法,建立了飞机俯仰方向的自动飞行控制系统的模型。
通过飞机仪表盘可视化以及襟翼状态仿真界面,利用验证模块,飞行数据测试等手段,完成了模型的可靠性验证并利用SCAD-KCG生成满足DO-178B民航A级标准的高可靠性嵌入式实时C 语言代码。
%Aircraft flight safety is an important topic in the aviation industry development, the automatic flight control is the effective way to reduce pilot workload and improve flight safety.Considering the aircraft movement security features,automatic pitchingflight control system model is set up in a high security SCADE application development environment by the data flow diagram,surface state and safety state machine modeling method.Through designing the dashboard and flap state simulation interface,the reliability of the model validation is completed by using the authentication module and data test.A high reliability embedded real-time C language code which meets the DO-178B grade A standard of civil aviation is generated by SCADE-KCG.【期刊名称】《科技创新导报》【年(卷),期】2015(000)027【总页数】4页(P3-6)【关键词】SCADE;安全性;自动飞行控制;仿真【作者】王禹;曹义华【作者单位】北京航空航天大学中法工程师学院;北京航空航天大学航空科学与工程学院北京 100191【正文语种】中文【中图分类】V24随着航空业的发展,飞机飞行的安全性越来越受到人们的关注,如何有效减轻驾驶员的驾驶压力,实现自动飞行控制系统是提高飞机飞行安全性的有效途径。
1 绪论本章先主要介绍了无人机进无人机的特点,国内外研究现状和发展趋势及这篇文章的主要内容安排。
1.1无人机概述无人机即无人驾驶飞机,也称为遥控驾驶飞行器,是机上没有驾驶员,靠自身程序控制装置操纵,自动飞行或者由人在地面或母机上进行遥控的无人驾驶飞行器,在它上面装有自动驾驶仪、程序控制系统、遥控与遥测系统、自动导航系统、自动着陆系统等,通过这些系统实现远距离控制飞行。
无人机大体上由无人机载体、地面站设备(无线电控制、任务控制、发射回收等起降装置)以及有效负荷三部分组成。
无人机在航空业已有一百年的历史了。
第一驾遥控航模飞机于1909年在美国试飞成功。
1915年10月德国西门子公司研制成功采用伺服控制装置和指令制导的滑翔炸弹,它被公认为有控的无人机的先驱。
世界上第一架无人机是英国人于1917年研制的。
这是一架无线电操纵的小型单翼机,由于当时的许多技术问题,所以试验失败。
一直到1921年英国才研制成可付诸实用的第一驾靶机。
1918年德国也研制成第一驾无人驾驶的遥控飞机。
1920年简氏《世界各地飞机》首次提到无人机。
20世纪30年代初无线电操纵的无人靶机研制成功。
在20世纪40至50年代,无人机逐渐得到了广泛使用,但这时主要是作为靶机使用。
世界各国空军于20世纪50年代大量装备了无人驾驶飞机作为空靶。
进入20世纪60年代后,美国出于冷战需要,将无人机研究重点放在侦察用途方面,这标志着无人机技术开始进入了以应用需求为牵引的快速发展时代。
由于无人机具有低成本、零伤亡、可重复使用和高机动等优点,因此深受世界各国军队的广泛欢迎,近年来得到了快速发展。
对于无人机而言,其自动飞行控制系统的设计是至关重要的,它的优劣程度直接影响到无人机各项性能(包括起飞着陆性能、作业飞行性能、飞行安全可靠性能、系统的自动化性和可维护性等)。
因此,研究无人机的自动飞行控制技术具有十分重要的现实意义,尤其是在军事上的重要性己经得到国内外的高度重视,而无人机飞行控制系统是无人机能够安全、有效地完成复杂战术、战略使命的基本前提,因此迫切需要加强该领域的研究工作。
飞行控制系统仿真飞行控制系统是飞机上至关重要的一个系统,它负责控制飞机的运行和飞行姿态,确保飞机的安全和稳定。
为了在实际飞行之前对飞行控制系统进行测试和验证,仿真技术成为一种重要的手段。
本文将介绍飞行控制系统仿真的原理、方法和应用。
一、仿真的原理飞行控制系统仿真是通过计算机模拟飞行控制系统的各个组成部分的行为和交互,以评估其性能和可靠性。
仿真可以在不同的环境条件下进行,例如研究飞机在不同气候条件下的飞行情况,或者模拟飞机在紧急情况下的应对措施。
在飞行控制系统仿真中,通常会建立一个虚拟的飞行环境,包括飞机的动力学模型、气象条件、飞行任务和航路等。
通过对这些参数的设置和模拟,可以模拟各种实际飞行情况,从而验证飞行控制系统的性能和可靠性。
二、仿真的方法飞行控制系统仿真有两种常见的方法,分别是物理仿真和数字仿真。
物理仿真是通过搭建实物模型或使用飞行模拟器等物理设备来进行仿真实验。
这种方法通常需要较大的投资和空间,但可以提供更接近实际飞行的情况,对飞行控制系统的性能和可靠性进行真实有效的测试。
数字仿真是使用计算机软件进行仿真,通过对飞行控制系统的建模和计算来模拟飞行过程。
这种方法相对来说成本较低,可以进行大规模、多场景的仿真实验。
同时,数字仿真也可以快速调整参数和条件,方便进行各种不同的实验和测试。
三、仿真的应用飞行控制系统仿真在飞机研发、飞行员培训和飞行安全评估等领域都有广泛应用。
在飞机研发方面,仿真可以帮助设计师评估不同设计方案对飞机性能和操控性的影响,提前发现问题和风险,优化飞机的设计和结构。
在飞行员培训方面,仿真可以提供逼真的飞行环境和各种飞行情况的模拟,让飞行员进行虚拟飞行训练,熟悉飞机的操作和应对不同场景的技巧。
在飞行安全评估方面,仿真可以通过模拟各种飞行事故和紧急情况,评估飞行控制系统的应对能力和安全性,为飞行安全管理提供可靠的数据和依据。
总结:飞行控制系统仿真是一种有效的手段,可以在实际飞行之前对飞行控制系统进行测试和验证。
军用飞机控制系统设计与仿真军用飞机是国家重要的安全保障力量之一,在现代战争中扮演着极其重要的角色。
它可以进行情报侦察、攻击、运输等各种任务,是现代战争中不可或缺的作战平台。
而军用飞机控制系统的设计与仿真则是军用飞机制造的核心技术,也是其发挥战斗力的重要保障。
一、系统概述军用飞机控制系统包括飞行控制系统、动力控制系统和导航控制系统三部分。
飞行控制系统是军用飞机的核心,它包括飞机的自动驾驶和手动操纵两种方式,以保持飞行的平稳及稳定,同时能够在高速飞行和恶劣天气等条件下进行精确的控制。
动力控制系统是指发动机和传动系等组件,它的任务是保证发动机输出的动力能够在不同的飞行阶段下恰当地分配。
导航控制系统则主要用于飞行员定位、航线规划和安全导航等,让飞行员能够更加准确地掌握飞行方向和位置。
二、系统设计1. 飞行控制系统设计飞行控制系统是军用飞机主要的飞行辅助系统,其功能主要包括飞行姿态控制、高度控制和速度控制等。
根据机载电气控制设备的经验,飞行控制系统包括飞行姿态稳定制和高度保持制,这两个制动的基本原理都是基于反馈控制原理实现的。
其中,飞行姿态平稳制的关键在于加速度计的工作,而高度保持制的关键则是气压计的工作。
同时,飞行控制系统中还需要加入控制软件,实现多维度控制算法的设计、开发和优化。
2. 动力控制系统设计军用飞机的动力控制系统主要包括发动机和传动系等组成部分,其主要任务是实现动力输出的控制。
其中,发动机是实现动力输出的核心组件,其设计要考虑到加速、减速和刹车等不同工作状态下的动力输出,同时具备快速响应和运行平稳的特点。
传动系包括减速器、轴承、齿轮等组件,需要具备高强度、高转速和高精密度的特点。
3. 导航控制系统设计导航控制系统需要实现飞行方向和位置的精确掌握,包括定位系统、航线规划和安全导航等。
其中,定位系统主要包括全球卫星导航系统(GNSS)、惯性导航系统(INS)等,能够精确获取飞机的位置和速度信息。
飞行器运动控制系统设计与仿真近年来,随着技术的不断创新,飞行器的使用越来越广泛,而飞行器的运动控制系统则是保证安全和稳定的核心所在。
在飞行器运动控制系统的设计和仿真中,主要涉及到三个方面的内容:动力学模型、控制算法和仿真环境。
一、动力学模型动力学模型是指对飞行器在运动过程中各种力的作用下所受到的力学约束进行建模。
在实际使用中,飞行器受到的外部干扰较多,而且存在非线性的情况,因此在建立动力学模型时需要考虑这些因素。
针对不同类型的飞行器,需要建立不同的动力学模型。
一般来说,动力学模型可以分为几种:单体飞行器动力学模型、多体飞行器动力学模型、神经网络飞行器动力学模型等。
其中,多体飞行器动力学模型是指将飞行器看作多个质点组成的系统,在具体模型设计时需要考虑到不同质点之间的相互作用。
二、控制算法控制算法是指针对飞行器的运动姿态和位置进行调整的算法。
对于不同类型的飞行器,控制算法也是不同的。
例如,针对无人机的控制算法可以分为经典PID算法、模糊控制算法、自适应控制算法等。
在进行控制算法设计时,需要考虑到系统稳定性、抗干扰能力、控制精度等因素。
同时,针对不同的控制需求和现实应用场景,控制算法的设计也必须非常灵活和全面。
需要不断研究新的算法,并根据实际情况对现有算法进行不断改进和调优。
三、仿真环境仿真环境是指模拟真实情况下飞行器动力学模型和控制算法进行测试的环境。
在仿真环境中,可以模拟飞行器在不同环境下的运动状态,并通过不同控制算法进行控制测试。
一般来说,仿真环境包含了三个方面:底层仿真平台、仿真建模工具和仿真过程分析工具。
其中,底层仿真平台可以根据不同的需求选择不同的模拟环境。
例如,使用Matlab等软件平台可以构建飞行器动力学模型和控制系统模型,并进行仿真测试。
而使用专业的仿真环境,则可以更加快速和规范地进行仿真测试。
结语综上所述,飞行器运动控制系统设计与仿真不仅需要建立合适的动力学模型和控制算法,同时还需要依赖仿真环境进行模拟测试。
飞控系统的设计与仿真随着航空技术不断发展,飞控系统在民用飞行器中的应用越来越广泛。
飞控系统是飞行器的大脑,它能够通过传感器感知飞行器的状态,根据飞行器当前状态和飞行任务的要求,计算出最优的控制指令,驱动飞行器完成各种飞行动作。
飞控系统的性能和可靠性直接影响到飞行器的飞行质量和安全性。
因此,飞控系统设计是民用飞行器研发的重要环节之一。
飞控系统的设计可以分为硬件设计和软件设计两个方面。
硬件设计主要包括飞控板、传感器和执行机构等部分。
传感器用于感知飞行器的状态,包括角速度、加速度、气压等参数。
执行机构则负责控制飞行器运动,包括电机、舵机等。
而飞控板则是将传感器和执行机构连接起来,接收传感器采集的数据和控制指令,进行数据处理和计算,并向执行机构发送控制信号。
同时,在飞控系统设计中,软件设计也不可忽视。
飞控系统的软件设计主要包括算法设计和程序编写两个方面。
算法设计是指根据飞行任务要求,选择合适的控制算法,并通过调试和优化来达到最佳控制效果。
程序编写则是将控制算法翻译成计算机可执行的代码,并通过模拟器和实验验证来检验和调试程序。
软件设计相比硬件设计具有更高的灵活性和可拓展性,“半年搬一次板子,一天不改程序”的说法正彰显着硬件和软件之比重不断改变的情形。
如果要设计一款优秀的飞控系统,需要考虑的因素有很多。
首先,飞控系统的响应速度和控制精度是非常关键的。
在民用飞行器的应用中,特别是需要高精度、高速运动时,响应时间和控制精度都会影响到飞行器的飞行性能和安全性。
其次,飞控系统的容错性和可靠性也是非常重要的因素。
不同于手机和智能家居等应用,一款飞控系统的失效可能会导致飞行器失去控制而造成重大事故,容错性和可靠性的设计必须严谨谨慎,通常需要实现多重备份和冗余设计。
第三,硬件和软件的协同工作也是非常关键的。
飞控系统的硬件和软件相辅相成,僵硬的硬件设计难以适应软件的高度可扩展性而软件不得不很大程度上退避设计。
因此,工程师需要对硬件和软件的设计进行综合考虑,实现系统组成部分的最优匹配,同时符合飞行器飞行需求和性能指标。
无人机的数学模型无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
可反复使用多次,广泛用于空中侦察、监视、通信、反潜和电子干扰等。
因此研究无人机控制系统的设计具有重要意义。
要研究无人机动力学模型的姿态仿真,首先必须建立飞机的数学模型。
在忽略机体震动和变形的条件下,飞机的运动可以看成包含六个自由度的刚体运动,其中包含绕三个轴的三种转动(滚动、俯仰与偏航)和沿三个轴的线运动。
为了确切的描述飞机的运动状态,必须选择合适的坐标系。
1.1常用坐标系1.1.1地面坐标系地面坐标系是与地球固连的坐标系。
原点A固定在地面的某点,铅垂轴向上为正,纵轴与横轴为水平面内互相垂直的两轴。
见图1-1。
图1-1 地面坐标系1.1.2机体坐标系机体坐标系原点在机的重心上,纵轴在飞机对称平面内,平行于翼弦,指向机头为正;立轴也在飞机对称平面内并垂直于,指向座舱盖为正;横轴与平面垂直,指向右翼为正,见图1-2。
1图1-2 机体坐标系1.1.3速度坐标系速度坐标系原点也在飞机的重心上,但轴与飞机速度向量V重合;也在对称平面内并垂直于,指向座舱盖为正;垂直于平面,指向右翼为正,见图2-3。
图1-3 速度坐标系1.2飞机的常用运动参数飞机的运动参数就是完整地描述飞机在空中飞行所需要的变量,只要这些参数确定了,飞机的运动也就唯一地确定了。
因此,飞机的运动参数也是飞机控制系统中的被控量。
被控量包括俯仰角、滚转角、偏航角、仰角、侧滑角、航迹倾斜角,航迹偏转角;同时利用副翼、方向舵、升降舵及油门杆来进行对飞机的控制。
这些称为无人机飞控系统中的控制量。
1.3.1 无人机六自由度运动方程式的建立3基于飞机运动刚体性的假设,我们就可以推导出飞机的一般数学模型为一组非线性微分方程组。
根据牛顿定律,其运动方程应由两部分组成:一部分是以牛顿第二定律(动力定律)为基础的动力学方程组,由此解得无人机相对于机体坐标系的角度向量和角速度向量;另一部分则是通过坐标变换关系得出的运动学方程组确定出无人机相对于地面坐标系的位置向量和速度向量。
第26卷 第5期计 算 机 仿 真2009年5月 文章编号:1006-9348(2009)05-0044-04L QG/L TR控制在无人机飞行控制中的实现及仿真周志久,闫建国,张琼燕(西北工业大学自动化学院,陕西西安710072)摘要:针对无人机飞行过程中存在的外界干扰以及传感器量测噪声的影响,采用LQG/LTR鲁棒控制技术,设计了无人机横侧向控制的最优控制器与最优滤波器(LQG),并且通过回路传输恢复技术(LTR)来弥补LQG设计的不足,完成了某型无人机横侧向控制设计,解决了飞机模型在随机干扰下控制系统可能出现的不稳定和控制精度不够的问题,并给出仿真。
仿真结果表明,LQG/LTR鲁棒控制系统实现了无人机横侧向指令的精确跟踪,具有良好的鲁棒性,满足飞机横侧向控制的要求,具有一定的实用价值。
关键词:鲁棒控制;无人机;横侧向控制;仿真中图分类号:TP391.9;V249.1 文献标识码:BI m ple m en t a ti on and S i m ul a ti on of L QG/L TR Con trolM ethod i n UAV Fli ght Con trolZHOU Zhi-jiu,Y AN J ian-guo,ZHANG Q i ong-yan(Depart m ent of Aut omatic Contr ol,North western Polytechnical University,Xi’an Shanxi710072,China) ABSTRACT:I n view of the influences of external disturbances and sens or measure ment noise in the UAV flightcourse,a LQG/LTR r obust contr ol method is utilized in designing the op ti m al contr oller and op ti m al filter(LQR)forlateral flight contr ol of UAV.Loop Transfer Recovery method(LT R)is als o used t o compensate for deficiency of theLQG design.The app licati on of LQG/LTR contr ol method accomp lishes the design f or lateral contr ol of certain UAV,and it s olves the p r oble m of instability and inaccuracy that the contr ol syste m of the aircraft model m ight undergo byrandom disturbances.The si m ulati on of the contr olmethod is given.Si m ulati on results indicate that the LQG/LTR r o2bust contr ol syste m is able t o track the lateral instructi ons accurately with good r obustness.It satisfies the lateral con2tr ol require ments and is of great value in p ractical p r ojects.KE YWO RD S:Robust contr ol;UAV;Lateral contr ol;Si m ulati on1 引言目前,无人机的使用范围涵盖了军事、民用和科研三大领域,应用广泛。