梯度法和共轭梯度法
- 格式:ppt
- 大小:1.44 MB
- 文档页数:27
matlab梯度算法Matlab梯度算法在数学和计算机科学中,梯度是指一个多元函数在某一点上的变化率或斜率。
梯度算法是一种优化算法,用于找到函数的最小值或最大值。
在Matlab中,有多种方法可以使用梯度算法来优化函数,包括梯度下降和共轭梯度法。
本文将详细介绍Matlab中的梯度算法,并逐步讲解其原理和应用。
I. 梯度下降法梯度下降法是一种基于迭代的优化算法,通过计算函数的梯度来更新参数的值,以逐步接近函数的最小值。
在Matlab中,可以使用"gradientDescent"函数来实现梯度下降法。
1. 实现梯度下降法首先,我们需要定义一个优化目标函数,例如:f(x) = x^2 + 2x + 1。
然后,定义其梯度函数为g(x) = 2x + 2。
接下来,我们可以使用以下代码来计算梯度下降:matlab定义优化目标函数f = (x) x^2 + 2*x + 1;定义梯度函数g = (x) 2*x + 2;初始化参数x0 = 0;设置学习率和迭代次数alpha = 0.01;iterations = 100;梯度下降法for i = 1:iterationsx0 = x0 - alpha * g(x0);end打印最优解disp(['Optimal solution: ', num2str(x0)]);在这个例子中,我们使用了学习率(alpha)为0.01,迭代次数(iterations)为100。
通过不断更新参数x0的值,最终得到了最优解。
2. 梯度下降法的原理梯度下降法的核心思想是利用函数在当前点的梯度信息来更新参数的值,以便能够向着函数的最小值前进。
具体来说,算法的步骤如下:a. 初始化参数的值:选择一个初始参数的值作为起始点。
b. 计算梯度:计算函数在当前点的梯度,即求解函数关于参数的偏导数。
c. 更新参数:根据当前点的梯度和学习率,通过减去梯度的乘积来更新参数的值。
优化设计梯度法和共轭梯度法梯度法和共轭梯度法是常用的数值优化算法,用于求解非线性优化问题。
它们在工程领域中的应用广泛,能够有效解决很多实际问题。
本文将对优化设计梯度法和共轭梯度法进行介绍,并比较它们的优劣。
1. 优化设计梯度法优化设计梯度法是一种通过调整设计变量来最小化给定目标函数的方法。
它基于梯度下降的思想,每一步都会更新设计变量的取值,使得目标函数在设计变量的邻域内最小化。
优化设计梯度法的具体步骤如下:1)初始化设计变量;2)计算目标函数在当前设计变量取值下的梯度;3)根据梯度方向和步长因子更新设计变量;4)重复步骤2和步骤3,直到满足收敛条件。
优化设计梯度法的优点是简单易用,容易实现。
但是它也存在一些问题,比如容易陷入局部最小值,收敛速度慢等。
2. 共轭梯度法共轭梯度法是一种通过迭代算法求解线性方程组的方法,也可以用于非线性优化问题。
它的特点是每一步迭代都要寻找一个新的搜索方向,使得每一次迭代都能够有效利用之前的搜索历史。
共轭梯度法的具体步骤如下:1)初始化设计变量和搜索方向;2)计算目标函数在当前设计变量取值下的梯度;3)根据搜索方向和步长因子更新设计变量;4)计算新的搜索方向,使其与上一次的搜索方向共轭;5)重复步骤2到步骤4,直到满足收敛条件。
共轭梯度法的优点是能够在较少的迭代次数内收敛到最优解,且具有较好的数值稳定性。
然而,共轭梯度法在非精确线搜索时有一定局限性,并且对于非二次凸函数可能陷入非全局最小值。
3. 优化设计梯度法与共轭梯度法的比较在实际应用中,选择合适的优化算法对于问题的解决和效率的提高至关重要。
下面对优化设计梯度法和共轭梯度法进行比较。
(1)收敛速度:在一般情况下,共轭梯度法比优化设计梯度法收敛速度更快。
这是由于共轭梯度法在搜索方向上的选择更加优化。
(2)算法复杂度:优化设计梯度法通常较为简单,易于实现,而共轭梯度法则相对复杂一些,需要额外计算共轭方向。
(3)全局最优解:共轭梯度法在处理非二次凸函数时可能陷入局部最小值,而优化设计梯度法的表现相对较差。
最优化问题的算法迭代格式最优化问题的算法迭代格式最优化问题是指在一定的条件下,寻找使某个目标函数取得极值(最大值或最小值)的变量取值。
解决最优化问题的方法有很多种,其中较为常见的是迭代法。
本文将介绍几种常用的最优化问题迭代算法及其格式。
一、梯度下降法梯度下降法是一种基于负梯度方向进行搜索的迭代算法,它通过不断地沿着目标函数的负梯度方向进行搜索,逐步接近极值点。
该方法具有收敛速度快、易于实现等优点,在许多应用领域中被广泛使用。
1. 算法描述对于目标函数 $f(x)$,初始点 $x_0$ 和学习率 $\alpha$,梯度下降算法可以描述为以下步骤:- 计算当前点 $x_k$ 的梯度 $\nabla f(x_k)$;- 更新当前点 $x_k$ 为 $x_{k+1}=x_k-\alpha\nabla f(x_k)$;- 如果满足停止条件,则输出结果;否则返回第 1 步。
2. 算法特点- 沿着负梯度方向进行搜索,能够快速收敛;- 学习率的选择对算法效果有重要影响;- 可能会陷入局部极小值。
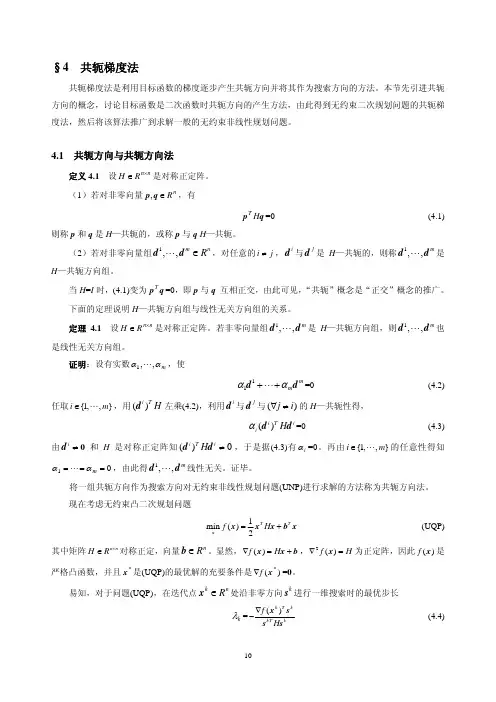
二、共轭梯度法共轭梯度法是一种基于线性方程组求解的迭代算法,它通过不断地搜索与当前搜索方向共轭的新搜索方向,并在该方向上进行一维搜索,逐步接近极值点。
该方法具有收敛速度快、内存占用少等优点,在大规模问题中被广泛使用。
1. 算法描述对于目标函数 $f(x)$,初始点 $x_0$ 和初始搜索方向 $d_0$,共轭梯度算法可以描述为以下步骤:- 计算当前点 $x_k$ 的梯度 $\nabla f(x_k)$;- 如果满足停止条件,则输出结果;否则进行下一步;- 计算当前搜索方向 $d_k$;- 在当前搜索方向上进行一维搜索,得到最优步长 $\alpha_k$;- 更新当前点为 $x_{k+1}=x_k+\alpha_k d_k$;- 计算新的搜索方向 $d_{k+1}$;- 返回第 2 步。
2. 算法特点- 搜索方向与前面所有搜索方向都正交,能够快速收敛;- 需要存储和计算大量中间变量,内存占用较大;- 可以用于非线性问题的求解。

16梯度法和共轭梯度法基本原理和特点?梯度法又称最速下降法,基本原理是在迭代点附近采用使目标函数值下降最快的负梯度方向作为搜索方向,求目标函数的极小值,特点;迭代计算简单,只需求一阶偏导数,所占的存储单元少,对初始点的要求不高,在接近极小点位置时收敛速度很慢,共轭的特点为在梯度法靠近极值点收敛速度放慢时,它可以构造共轭方向使其收敛速度加快,迭代计算比较简单,效果好,在每一步迭代过程中都要构造共轭的、方向,比较繁琐。
17迭代终止准则有哪三种?1)当设计变量在相邻两点之间的移动距离充分小时,可用相邻两点的矢量差的模作为终止的判据,2)当相邻两点目标函数值之差达到充分小时,可用两次迭代的目标函数之差作为终止判据。
3)当迭代点逼近极值点时,目标函数在该点的梯度已达到充分小时,可用梯度的模作为终止判据。
18.无约束设计法,1)powell法,它是在下降迭代过运算中只需计算和比较目标函数值的大小,不需计算偏导数的方法,是较好的一种直接搜索算法。
2)梯度法,又称最速下降法,它是采用使目标函数值下降最快的负梯度方向作为搜索方向来求目标函数的极小值。
3)共轭梯度法,又称FR法,是利用目标函数的梯度确定共轭方向,使得计算简便而效果好,只需利用相邻两点的梯度就可以构造一个共轭方向,这种方式产生共轭方向并进行迭代的算法称为共轭梯度法。
4)变尺度法,又称DFP法,为了得到既有快速收敛的性质,又能避免计算二阶导数矩阵及逆矩阵,减少计算工作量。
迭代公式X=X+aS,19有约束设计法?1)复合形法,在可行域中选取k个设计点作为初始复合形的顶点,然后比较复合形个各项目标函数值的大小,其中目标函数值最大的点为坏点,以坏点之外其余各点的中心为映射中心,寻坏点的映射点,以映射点替换坏点,并与原复合型除坏点之外其余各点构成就k 顶点的新的复合型,这样反复迭代直到达到精度找到最优点,2)简约梯度法,用来解决线性约束非线性规划问题。
3)罚函数法,是把一个有约束的问题转化为一系列无约束的问题求解,逐渐逼近最优值。
共轭梯度法对物质的一种分析方法,共轭梯度分析法是近几十年发展起来的无损检测技术。
共轭梯度技术是将多种物理效应相结合,并且具有较高的检出率、分辨率和灵敏度,这是一种具有很大发展潜力的分析技术。
共轭梯度法主要包括:共轭电子效应、共轭磁效应、共轭梯度效应。
共轭梯度分析技术是一种高效的新型无损检测技术。
其主要优点在于:①不需要使用电子源;②同时利用共轭电子效应和共轭磁效应,可以消除多种原子的外层电子对核磁矩的屏蔽作用,同时,也降低了铁磁性物质的饱和磁化强度的影响;③能够实现对缺陷浓度较低的金属或非金属材料的快速检测。
共轭梯度技术是20世纪70年代发展起来的无损检测技术,它是利用一些特殊的元素(如铝、铅、铋等)与一些有色金属的原子形成离子,或在两者之间形成过渡族的元素(如汞、铊、铟等),从而达到产生强共轭的效果,再利用超声场或磁场改变他们的相互作用,而不改变他们的化学性质。
共轭梯度的基本原理:①共轭电子效应。
就是利用一些电负性比较强的元素作为原子核,因此他们最外层的电子被核外其他电子吸引,由于距离原子核较远,受到核外电子的排斥,所以核外电子浓度较小。
其电子从价带跃迁到导带,然后再跃迁回价带,所以他们不显电性。
反之,价带中的电子被导带中的电子所吸引,从而降低了价带的电子密度,增加了导带的电子密度,使得原子的核外电子浓度减少,同样会使原子的磁矩减弱。
因此,与这些元素形成化合物的非金属元素的电子都会向原子核附近集聚,从而影响原子的磁矩。
但是当原子序数越高,因为核外电子对核磁矩的屏蔽作用越弱,元素形成的化合物的稳定性越高,原子序数越高的元素的电子就越容易向原子核靠拢。
②共轭磁矩效应。
与电子的共轭电子效应相反,铁磁性物质的原子的核外电子轨道对外磁矩的影响相对比较大。
当这些原子处于磁化状态时,内层电子只能自旋平行,但是这个平行的自旋磁矩,会使这些原子的自旋磁矩大小相等,互相抵消,因此这些原子呈顺磁性。
但当这些原子处于非磁化状态时,内层电子的自旋磁矩可以取向不同,所以,铁磁性物质又显示出反铁磁性。
共轭梯度法计算化学
共轭梯度法是一种常用于求解线性方程组的迭代方法,也可以用于计算化学中的一些问题。
在计算化学中,共轭梯度法常用于求解分子结构优化、能量最小化、电子结构计算等问题。
其中最常见的应用是求解非常大的线性方程组,如Hartree-Fock方程,即通过求解一个自洽的线性方程组来得到分子的基态电子结构。
共轭梯度法利用了线性方程组的特殊性质,通过迭代计算逼近线性方程组的解。
它不需要事先知道线性方程组的解的精确形式,只需要知道线性方程组的系数矩阵和右端向量。
在每一次迭代中,共轭梯度法利用之前的迭代结果和当前的残差信息来计算一个新的搜索方向,从而逼近解的位置。
通过多次迭代,共轭梯度法可以逐渐接近线性方程组的解。
在化学计算中,尤其是量子化学计算中,共轭梯度法经常用于求解大型稠密矩阵的特征值问题。
这些问题通常涉及求解特征方程,得到能量的本征值和本征函数。
共轭梯度法的迭代性质使得它非常适合处理大型稠密矩阵的特征值计算问题,因为它只需要存储和计算与当前解和残差相关的信息,而不需要存储和计算整个矩阵。
总之,共轭梯度法是一种非常有效的迭代方法,可以用于求解线性方程组以及一些涉及大型矩阵的计算化学问题。
在实际应用中,共轭梯度法经常与其他优化算法结合使用,以获得更高效、更准确的结果。
共轭梯度法最简明解释
嘿,你知道啥是共轭梯度法不?这玩意儿可神奇啦!就好比你在一
个迷宫里找出口,有好多条路可以走。
共轭梯度法呢,就是一种找到最优解的方法。
想象一下,你要去山
顶看最美的风景,但是山有很多坡,你得选择最合适的路往上爬。
比
如说你一开始随便选了一条路走,走着走着发现不太对,那咋办?这
时候共轭梯度法就发挥作用啦!它会帮你调整方向,让你更接近山顶。
我给你举个例子哈,就像你要减肥,你试过各种方法,节食啦,运
动啦。
那共轭梯度法就像是有个智慧的教练在旁边,告诉你啥时候该
多吃点,啥时候该加大运动量,让你能最快地达到减肥的目标。
它不是那种死板的方法,而是很灵活的。
比如说在解决一个复杂的
问题时,它会根据实际情况不断调整策略。
这多厉害呀!
咱再想想,要是没有共轭梯度法,那得多费劲呀!就像你在黑夜里
没有手电筒,摸黑走路,多容易摔跤呀!
共轭梯度法真的是数学和科学领域的一个大宝贝!它能让很多难题
变得简单起来,能帮我们更快地找到答案。
我觉得吧,共轭梯度法就像是一把神奇的钥匙,能打开很多知识和
技术的大门,让我们看到更广阔的世界!你说是不是?。