电机功率控制器
- 格式:pptx
- 大小:3.47 MB
- 文档页数:22
电机控制器的结构组成电机控制器是一种用于控制电机运行的设备,它的结构组成包括主控芯片、功率模块、驱动电路、输入输出接口等几个主要部分。
下面将详细介绍电机控制器的结构组成。
1. 主控芯片主控芯片是电机控制器的核心部件,负责控制整个电机的运行。
主控芯片通常采用高性能的微处理器或专用的控制芯片,具有强大的计算和控制能力。
它能够接收来自输入输出接口的信号,并根据预设的算法进行运算和判断,最终输出相应的控制信号给驱动电路。
2. 功率模块功率模块是电机控制器中的关键组成部分,主要负责将主控芯片输出的控制信号转化为电机所需的高电压、大电流信号。
功率模块通常由功率开关器件(如晶体管或IGBT)和驱动电路组成。
当主控芯片输出控制信号时,功率开关器件会根据信号的变化情况进行开关操作,从而控制电机的转速、转向等。
3. 驱动电路驱动电路是连接主控芯片和功率模块的桥梁,它负责将主控芯片输出的逻辑信号转化为驱动功率模块所需的电压和电流信号。
驱动电路通常由电平转换电路和电流放大电路组成。
电平转换电路能够将主控芯片输出的低电平信号转化为驱动功率模块所需的高电平信号;而电流放大电路则能够将主控芯片输出的微弱电流信号放大为足够驱动功率模块的电流信号。
4. 输入输出接口输入输出接口是电机控制器与外部设备(如传感器、通讯设备等)进行数据交换和控制指令传递的通道。
它通常包括模拟输入接口、数字输入输出接口、通讯接口等几种类型。
模拟输入接口能够接收来自传感器等模拟信号,并将其转化为数字信号给主控芯片处理;数字输入输出接口则负责与外部设备进行数字信号的交换;通讯接口则能够通过特定的通讯协议与其他设备进行数据传输和控制指令的交互。
电机控制器的结构组成包括主控芯片、功率模块、驱动电路和输入输出接口等几个主要部分。
主控芯片负责控制整个电机的运行,功率模块将控制信号转化为电机所需的高电压、大电流信号,驱动电路将逻辑信号转化为驱动功率模块所需的电压和电流信号,而输入输出接口则负责与外部设备进行数据交换和控制指令传递。
电机控制器的组成引言电机控制器是一种用于控制电机运行的设备,广泛应用于工业生产、交通运输、家用电器等领域。
电机控制器的组成是实现电机运行的关键,它包括多个部分的协同工作,通过信号的输入和输出来实现对电机的精确控制。
本文将对电机控制器的组成进行全面、详细、完整且深入地探讨。
电机控制器的基本组成电机控制器的基本组成是由电源模块、信号输入模块、控制处理模块和驱动输出模块四个部分组成。
电源模块电源模块是电机控制器的基础,它提供电机运行所需的电能。
电源模块主要包括电源输入接口、电源管理电路和电源输出接口三部分。
其中,电源输入接口负责接收外部电源,并将其转换为控制器所需的电压和电流;电源管理电路负责稳定和管理电源输出的电压和电流,以确保电机正常运行;电源输出接口则将处理好的电能输出给其他模块,驱动电机的运行。
信号输入模块信号输入模块是与电机控制器外部进行通信的接口,它负责接收用户的指令或传感器的反馈信号。
信号输入模块可以通过串行通信、并行口、开关量输入等方式与外部设备进行连接。
它将接收到的信号进行处理,然后传递给控制处理模块进行下一步的控制动作。
控制处理模块控制处理模块是电机控制器的核心部分,它根据接收到的信号进行运算和判断,并输出相应的控制命令。
控制处理模块一般由单片机或FPGA等芯片组成,它具有处理能力强、响应速度快的特点。
控制处理模块通常包括输入端口、计算单元、控制逻辑和输出端口等几个部分,通过这些部分的协同工作,实现对电机的精确控制。
驱动输出模块驱动输出模块是将控制处理模块输出的控制命令转化为电机能够理解的信号,并驱动电机的运动。
驱动输出模块通常由电机驱动芯片和功率输出电路两部分组成。
电机驱动芯片负责将控制处理模块输出的信号进行放大、滤波和适配等处理,以确保电机能够稳定运行。
而功率输出电路则负责将处理好的信号输出给电机,实现对电机的驱动。
电机控制器的工作流程电机控制器的工作流程一般包括信号输入、控制处理和驱动输出三个步骤。
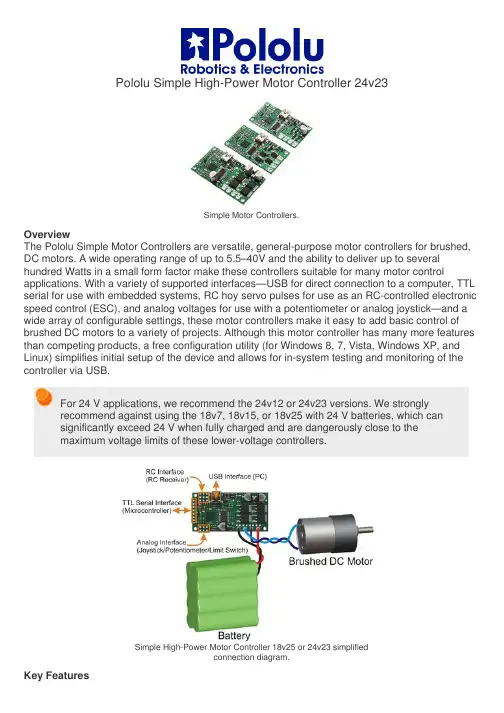
Pololu Simple High-Power Motor Controller 24v23Simple Motor Controllers.OverviewThe Pololu Simple Motor Controllers are versatile, general-purpose motor controllers for brushed, DC motors. A wide operating range of up to 5.5–40V and the ability to deliver up to several hundred Watts in a small form factor make these controllers suitable for many motor control applications. With a variety of supported interfaces—U SB for direct connection to a computer, TTL serial for use with embedded systems, RC hoy servo pulses for use as an RC-controlled electronic speed control (ESC), and analog voltages for use with a potentiometer or analog joystick—a nd a wide array of configurable settings, these motor controllers make it easy to add basic control of brushed DC motors to a variety of projects. Although this motor controller has many more features than competing products, a free configuration utility (for Windows 8, 7, Vista, Windows XP, and Linux) simplifies initial setup of the device and allows for in-system testing and monitoring of the controller via USB.For 24 V applications, we recommend the 24v12 or 24v23 versions. We stronglyrecommend against using the 18v7, 18v15, or 18v25 with 24 V batteries, which cansignificantly exceed 24 V when fully charged and are dangerously close to themaximum voltage limits of these lower-voltage controllers.Simple High-Power Motor Controller 18v25 or 24v23 simplifiedconnection diagram.Key FeaturesSimple bidirectional control of one DC brush motor.5.5 V to 30 V (18v7, 18v15, and 18v25) or 40 V (24v12 and 24v23) operating supply range.7 A to 25 A maximum continuous current output without a heat sink, depending on controller modelFour communication or control options:1. USB interface for direct connection to a PC.2. Logic-level (TTL) serial interface for direct connection to microcontrollers orother embedded controllers.3. Hoy radio control (RC) pulse width interface for direct connection to an RCreceiver or RC servo controller.4. 0–3.3 V analog voltage interface for direct connection to potentiometers andanalog joysticks.Simple configuration and calibration over USB with free configuration program (Windows 8, 7, Vista, Windows XP, and Linux compatible).Note: A USB A to mini-B cable (not included) is required to connect this controller to acomputer.Additional FeaturesComprehensive user’s guide with plenty of connection diagrams and sample code.Adjustable maximum acceleration and deceleration to limit electrical and mechanical stress on the system.Adjustable starting speed, maximum speed, and amount of braking when speed is zero.Optional safety controls to avoid unexpectedly powering the motor.Input calibration (learning) and adjustable scaling degree for analog and RC signals.Under-voltage shutoff with hysteresis for use with batteries vulnerable to over-discharging (e.g. LiPo cells).Adjustable over-temperature threshold and response.Adjustable PWM frequency from 1 kHz to 22 kHz (maximum frequency is ultrasonic, eliminating switching-induced audible motor shaft vibration).Error LED linked to a digital ERR output, and connecting the error outputs of multiple controllers together optionally causes all connected controllers to shut down when any one of them experiences an error.Field-upgradeable firmware.USB/Serial features:Controllable from a computer with native USB, via serial commands sent to the device’s virtual serial (COM) port, or via TTL serial through the device’s RX/TX pins.Example code in C#, Visual Basic .NET, and Visual C++ is available in the Pololu USB Software Development KitOptional CRC error detection to eliminate communication errors caused by noise or software faults.Optional command timeout (shut off motors if communication ceases).Supports automatic baud rate detection from 1200 bps to 500 kbps, or can be configured to run at a fixed baud rate.Supports standard compact and Pololu protocols as well as the Scott Edwards Mini SSC protocol and an ASCII protocol for simple serial control from a terminal program.Optional serial response delay for communicating with half-duplex controllers such as the Basic Stamp.Controllers can be easily chained together and to other Pololu serial motor and servo controllers to control hundreds of motors using a single serial line.Two Pololu Simple Motor Controllersenable mixed RC-control of Dagu WildThumper 4WD all-terrain chassis.RC features:1/4 µs pulse measurement resolution.Works with RC pulse frequencies from 10 to 333 Hz.Configurable parameters for determining what constitutes an acceptable RC signal.Two RC channels allow for single-stick (mixed) motor control, making it easy to use two simple motor controllers in tandem on an RC-controlled differential-drive robot (you might find our RC servo Y splitter cables useful for connecting two SMCs to a single RC receiver).RC channels can be used in any mode as limit or kill switches (e.g. use an RC receiver to trigger a kill switch on your autonomous robot).Battery elimination circuit (BEC) jumper can power the RC receiver with 5 V or3.3 V.Analog features:0.8 mV (12-bit) measurement resolution.Works with 0 to 3.3 V inputs.Optional potentiometer/joystick disconnect detection.Two analog channels allow for single-stick (mixed) motor control, making it easy to use two simple motor controllers in tandem on a joystick-controlled differential-drive robot.Analog channels can be used in any mode as limit or kill switches.This video demonstrates the versatility of the Simple Motor Controller by showing how it can be controlled directly from the analog output of a Sharp analog distance sensor—there is no intermediate control board and no programming involved. For more information on this example, including the SMC settings file and a list of parts used, see our blog post about the demo. Simple Motor Controller Comparison TableThe Simple Motor Controllers are available in several input voltage ranges and output current ranges:1significantly exceed 24 V when fully charged. The 24v12 and 24v23 are the much more appropriate controller for 24 V applications. 2 This is the weight of the board without header pins, terminal blocks, or through-hole power capacitor.Included HardwareSimple High-Power Motor Controller 18v15or 24v12, fully assembled.Simple High-Power Motor Controller 18v15or 24v12, partial kit with includedhardware.Most Simple Motor Controllers are available “fully assembled”, with the power capacitor and connectors pre-installed, or with these components included but not soldered in. For example, a fully assembled 18v15 ships as shown in the left picture above, and an 18v15 with included hardware ships as shown in the right picture above (the included hardware consists of a power capacitor, a 40×1 straight 0.1" male header strip, a 5mm-pitch 4-pin terminal block, and a blue shorting block).The connector-free version allows flexibility in choice of connectors and placement of the power capacitor (e.g. on the other side of the board) to accommodate compact installations or to make room for a heat sink.Note: The power capacitor has a significant effect on performance; the includedcapacitor is the minimum size recommended, and bigger ones can be added if there is space. A bigger capacitor might be required if the power supply is poor or far (more than about a foot) from the controller.The included terminal blocks are only rated for 16 A, so we recommend soldering thick wires directly to the connector-free version of the board and using higher-currentconnectors for applications that will exceed the terminal blocks’ ratings.Simple Motor Controller 18v7bottom view with dimensions.Simple High-Power Motor Controller 18v15 or 24v12bottom view with dimensions.Simple High-Power Motor Controller 18v25 or 24v23bottom view with dimensions.Warning: Take proper safety precautions when using high-power electronics. Make sure you know what you are doing when using high voltages or currents! During normal operation, this product can get hot enough to burn you. Take care when handling this product or other components connected to it.Documentation on producer website.。
电机控制器的组成一、引言电机控制器是指用来控制电机的设备,是现代工业中不可或缺的重要组成部分。
电机控制器有着多种不同的形式和结构,但是它们都包含了一些基本的组成部分。
本文将从以下四个方面来详细介绍电机控制器的组成:主回路、控制回路、保护回路和供电回路。
二、主回路主回路是电机控制器中最重要的部分之一,它通常由接触器、断路器和电源组成。
其中接触器用于控制主回路的开关,断路器用于保护电机和设备免受过载和短路等故障,而电源则为整个系统提供所需的能量。
1. 接触器接触器是一种用于控制大功率负载开关的装置,通过它可以实现对主回路中负载的开/关操作。
它通常由线圈、移动触点和固定触点等几个部分组成。
当线圈受到激励时,移动触点会被吸引并与固定触点相连,从而使得负载得以通电或断电。
2. 断路器断路器是一种在电路中断开电流的保护装置,它能够在电路中出现过载或短路等故障时自动切断电源,从而防止设备或人员受到损害。
断路器通常由触发机构、弹簧机构和触头等部分组成,当电流超过额定值时,触发机构会使得弹簧机构动作并使触头分离,从而切断电流。
3. 电源电源是整个系统的能量来源,它可以为主回路提供所需的直流或交流电压。
在大多数情况下,交流电源需要通过变压器进行降压和整流处理后才能够为主回路提供稳定的直流电压。
三、控制回路控制回路是用于控制主回路中负载开/关状态的部分。
它通常由控制器、传感器和执行器等几个部分组成。
控制器是整个系统的“大脑”,它可以根据传感器反馈的信号来判断负载状态,并通过执行器来实现对负载开/关状态的控制。
1. 控制器控制器是用于对主回路进行逻辑运算和控制操作的设备。
它通常由微处理器、存储器和输入/输出接口等部分组成。
控制器可以根据预设的程序和算法来实现对负载开/关状态的控制,并能够根据传感器反馈的信号来进行自动调节。
2. 传感器传感器是用于感知负载状态和环境参数的设备,它通常由温度传感器、压力传感器和位置传感器等部分组成。
电机控制器电机控制器是一种用于控制电机的设备,它可以根据用户的需求,控制电机的速度、转向和启停等动作。
在工业控制、交通运输、家居电器等领域广泛应用。
一、电机控制器的基本原理电机控制器的基本原理是通过控制电压、电流和频率等参数,来实现对电机的控制。
电机控制器通常由电源模块、控制模块和驱动模块三部分组成。
1. 电源模块:电源模块为电机控制器提供所需的电力,通常包括直流电源和交流电源两种类型。
直流电源一般用于低功率电机的控制,交流电源则适用于高功率电机的控制。
2. 控制模块:控制模块是电机控制器的核心部分,它负责接收用户的操作指令,并将其转化为控制信号,以控制电机的运行状态。
控制模块通常由微处理器、传感器、编码器等组成,它能够实时监测电机的转速、转向和负载情况,并根据需求调整控制信号。
3. 驱动模块:驱动模块将控制信号转化为电机所需的电压、电流和频率等参数,以实现对电机的控制。
驱动模块通常由功率放大器、开关电路等组成,它能够提供足够的功率给电机,使其能够正常运转。
二、电机控制器的应用领域1. 工业控制:在工业生产中,电机控制器被广泛应用于各类生产设备和机械装置的控制系统中。
通过电机控制器,可以实现对生产设备的精确控制,提高生产效率和产品质量。
2. 交通运输:电机控制器在汽车、火车、飞机等交通工具中的应用十分常见。
它能够控制车辆的加速、减速和转向等动作,提高行驶的安全性和舒适性。
3. 家居电器:家用电器中的电机控制器主要用于控制洗衣机、冰箱、空调等电器设备的运行。
通过电机控制器的精确控制,可以调节设备的工作模式和运行参数,提升用户体验。
4. 智能机器人:电机控制器在智能机器人领域的应用也越来越广泛。
通过电机控制器,机器人可以实现精确的运动控制,完成各类任务,如搬运、装配、清洁等。
三、电机控制器的发展趋势随着科技的进步和物联网技术的快速发展,电机控制器也在不断创新和改进中。
未来的电机控制器将具有以下特点:1. 高效节能:电机控制器将通过优化控制算法和降低能量损耗,实现对电机的高效控制和节能运行。
电机控制器是一种用于控制电机运行的装置,主要包括电源模块、控制电路、功率电路和保护电路等组成部分。
下面是电机控制器的一般结构和工作原理:电源模块:电源模块为电机控制器提供电能,通常包括整流器和滤波器等电路,将来自电网或电池的电能转换为适合控制电路和功率电路使用的直流电源。
控制电路:控制电路是电机控制器的核心部分,负责接收用户输入的控制信号,并根据信号进行相应的处理和计算,控制电机的启停、速度、方向等参数。
控制电路通常包括微处理器、传感器、编码器和驱动器等元件。
功率电路:功率电路负责将控制信号转换为电机驱动所需的高功率输出信号。
它包括功率放大器、开关器件(如晶体管或功率场效应管)和电机驱动部分,通过控制开关器件的导通与断开来调节电机的电流和电压,从而实现电机的速度和扭矩控制。
保护电路:保护电路用于监测和保护电机和控制器免受电压过高、电流过大、过热等不良情况的影响。
它包括过流保护、过温保护、短路保护和电压保护等功能,确保电机和控制器的安全运行。
电机控制器的工作原理如下:接收信号:控制电路接收来自用户输入或其他控制系统的指令信号,例如速度设定、启停信号等。
处理信号:控制电路对接收到的信号进行处理,根据设定的算法和逻辑进行计算和判断,并生成相应的控制信号。
驱动电机:功率电路接收控制信号,并将其转换为适合电机驱动的高功率信号。
通过控制开关器件的导通与断开,调节电机的电流和电压,实现电机的转速和扭矩控制。
监测与保护:保护电路实时监测电机和控制器的工作状态,如电流、温度、电压等参数,一旦检测到异常情况,会触发保护机制,保护电机和控制器免受损坏。
电机控制器的结构和工作原理可以根据具体应用和要求进行调整和优化。
不同类型的电机控制器可能有不同的电源模块、控制电路和保护电路设计,以适应不同的电机类型和工作条件。
电机控制器发电模式工作原理电机控制器是电机运行的核心部件,它负责对电机的启动、运行、制动和转向等进行控制。
电机控制器的工作原理可以分为发电模式和电动模式。
本文将重点介绍电机控制器在发电模式下的工作原理。
一、电机控制器的基本原理电机控制器的基本原理是根据电机的工作特性,通过控制电机绕组中电流的方向和大小,来控制电机的转速、转矩和运行状态。
电机控制器通常由功率电子器件、控制电路和驱动电路组成。
功率电子器件负责实现电流的方向和大小的控制,控制电路负责生成相应的控制信号,驱动电路负责将控制信号转换为功率电子器件所需的控制信号。
二、发电模式工作原理在发电模式下,电机控制器的主要任务是将电机的旋转动能转换为电能,实现发电的功能。
以下是电机控制器在发电模式下的工作原理:1. 转子旋转:电机转子在发电模式下旋转,切割磁感线,产生感应电动势(EMF)。
转子上的绕组中的导线在磁场中运动,导致电子在导线中产生移动,从而产生电动势。
2. 整流器:转子绕组中产生的交流电动势通过整流器进行整流,将交流电转换为直流电。
整流器通常由多个二极管组成,用于将交流电的负弦波变为脉动的直流电。
3. 滤波器:滤波器用于平滑整流器输出的脉动直流电,减少电流的波动,提供更稳定的直流电源。
滤波器通常由电容器组成,用于存储电能,平滑电流的波动。
4. 控制电路:控制电路负责监测电机的工作状态,包括转速、电流和电压等参数。
根据监测到的参数,控制电路生成相应的控制信号,调整电机的工作状态,实现发电的优化。
5. 驱动电路:驱动电路负责将控制信号转换为功率电子器件所需的控制信号。
驱动电路通常由晶体管、晶体管驱动器等组成,用于放大控制信号,驱动功率电子器件工作。
6. 功率电子器件:功率电子器件负责实现电流的方向和大小的控制。
在发电模式下,功率电子器件通常工作在开关状态,根据控制信号的变化,实现电机绕组中电流的方向和大小的控制。
7. 输出接口:发电模式下,电机控制器将整流和滤波后的直流电输出到外部电路,为外部设备提供电能。
48v 1200w电机控
48V 1200W电机控是指一个电机控制器,它能够控制和驱动一个48V电压和1200W功率的电机。
电机控制器可以被视为一个电子设备,它是将电池电压转化为电机所需要的电压和电流的一个关键部件。
通过电机控制器,你可以控制电机的速度和方向,并且可以监测电机的温度和电流等参数,确保电机在安全和有效的工作状态下运行。
48V表示电机控制器的输入电压为48伏特。
1200W表示电机控制器能够驱动的电机最大功率为1200瓦特,也就是说,它可以驱动最大功率为1200瓦特的电机来完成工作。
电机控制器通常由多个部分组成,包括电源、控制电路、功率电路和通信接口。
电源将电池电压转换为电机控制器需要的电压,控制电路负责控制电机的速度和方向,功率电路则将电源电压转化为电机所需的高电压和大电流。
通信接口可以让电机控制器与其他设备进行通信,例如与电脑或手机连接,实现遥控控制。
总之,48V 1200W电机控制器是一种能够控制和驱动48V电压和1200W功率电机的电子设备,通过它可以控制电机的速度和方向,并且能够监测电机的温度和电流等参数,确保电机在安全和有效的工作状态下运行。
功率控制器原理功率控制器是一种用于控制电力系统中功率流动的设备,它可以根据系统负载的需求来调节电源输出,从而实现对电力系统的有效控制。
在电力系统中,功率控制器扮演着至关重要的角色,它能够提高系统的稳定性和效率,同时也能够保护系统免受过载和短路等问题的影响。
本文将介绍功率控制器的原理及其在电力系统中的应用。
功率控制器的原理是基于电力电子器件的控制原理,通过改变电源输出的电压、电流或频率来实现对系统功率的调节。
其中,最常见的功率控制器包括可控硅、晶闸管、场效应管等电力电子器件,它们能够根据控制信号来调节电源输出,实现对系统功率的精确控制。
通过合理的控制算法,功率控制器可以实现对电力系统的动态调节,使系统能够适应不同负载条件下的工作需求。
在电力系统中,功率控制器通常被用于调节交流电源的输出,以满足不同负载条件下的功率需求。
通过控制电压、电流或频率,功率控制器可以实现对系统负载的动态调节,从而提高系统的稳定性和效率。
此外,功率控制器还可以通过限制电流或电压的幅值来保护系统免受过载和短路等问题的影响,确保系统能够稳定可靠地运行。
除了在传统的电力系统中应用外,功率控制器在新能源领域也有着重要的应用。
例如,在太阳能发电系统中,功率控制器可以根据光照条件和负载需求来调节太阳能电池板的输出功率,使其能够最大限度地利用太阳能资源。
在风力发电系统中,功率控制器可以根据风速和负载需求来调节风力发电机的输出功率,实现对风力发电系统的有效控制。
总之,功率控制器作为电力系统中的重要设备,具有着广泛的应用前景。
它能够通过精确的功率调节,提高系统的稳定性和效率,同时也能够保护系统免受各种问题的影响。
随着新能源技术的不断发展,功率控制器将在未来的电力系统中发挥更加重要的作用,为电力系统的安全稳定运行提供强大的支持。
电机控制器工作原理一、什么是电机控制器?电机控制器是一种用于控制电机运行的设备,它能够接收来自外部的信号,通过控制电机的电流、电压等参数,实现对电机的精确控制。
电机控制器广泛应用于各种电机驱动系统中,如工业生产中的机床、自动化生产线、电动汽车等。
二、电机控制器的组成电机控制器主要由以下几个部分组成:1. 电源模块电源模块用于提供电机控制器所需的电源,一般需要将市电的交流电转换成适合电机控制器使用的直流电。
2. 控制信号输入模块控制信号输入模块用于接收来自外部的控制信号,可以是模拟信号或数字信号。
模拟信号一般通过电压、电流的变化来表示,而数字信号则是用二进制代码表示。
3. 控制逻辑模块控制逻辑模块是电机控制器的核心部分,它通过对输入信号的处理和计算,生成控制电机运行所需要的电流、电压等参数。
4. 功率模块功率模块负责将控制逻辑模块生成的电流、电压信号转换成实际驱动电机的功率信号。
它通常包括功率放大器、开关元件等。
5. 保护模块保护模块用于对电机控制器及其周边设备进行保护。
它可以监测电机控制器的工作状态,并在异常情况下进行处理,以避免电机或电机控制器的损坏。
三、电机控制器的工作原理电机控制器的工作原理可以简单概括为以下几个步骤:1. 信号接收与处理电机控制器首先需要接收来自外部的控制信号,这些信号可以是手动输入的、传感器测量的或来自其他控制设备的。
接收到的信号经过控制信号输入模块进行处理,将其转换成电机控制器可以识别和处理的信号。
2. 控制算法计算控制逻辑模块接收到处理后的信号,根据预先设定的控制算法对信号进行处理和计算。
常见的控制算法包括PID控制算法、矢量控制算法等。
控制算法的目的是根据系统要求和运行状态,生成合理的控制信号,以实现电机的精确控制。
3. 功率转换与驱动功率模块接收到控制逻辑模块生成的控制信号,将其转换成实际驱动电机所需的功率信号。
功率模块一般包括功率放大器和开关元件。
功率放大器负责放大控制信号,开关元件则根据控制信号的大小和频率,控制通断,将电源的电能传递给电机。
电机控制器有几种
电机控制器有几种
1、电机起动器
小电动机可以用开关或断路器接到电源来启动,大电动机需要配合特殊的切换单元,称为电动机启动器或电动机接触器。
当启动时,在线直接起动(directonline,简称DOL)的启动器会直接将电动机接到电源。
降压启动器、Y-Δ切换启动器或软启动器会借由降电压的电路将电源接到电动机,之后电压会逐渐上升或分段上升。
较小功率的电动机启动器是一个人工操作的开关,较大的电动机或是需要遥控或是自动控制的应用,一般会使用磁性接触器。
中压电源(约数千伏特)会用断路器作为开关元件。
在线直接起动(directonline,简称DOL)的电动机启动器会将线电压全部加到电动机端,这是最简单的电动机启动器。
在线直接起动的启动器也可以包括保护元件。
小功率的在线直接起动启动器是用人工操作的,大功率的启动器会用机电的接触器(继电器)来切换电动机电路,也有使用固态电子的在线直接起动启动器。
若电动机启动的高突入电流不会造成电源的过多电压下降,此时就会。
电机控制器工作原理
电机控制器是一种用于控制和驱动电动机运行的设备,其工作原理主要涉及电路、逻辑控制和信号处理等方面,下面将对其工作原理进行详细介绍。
首先,电机控制器的核心部分是电路,主要包括电源电路、控制电路和功率电路。
电源电路提供所需的电能给控制器和电动机;控制电路负责接收来自用户或外部传感器的信号,并将其转化为控制电压或电流信号;功率电路则通过控制电路产生的信号来调节电动机的功率输出。
其次,电机控制器通过逻辑控制实现对电动机的运行控制。
控制器根据输入的控制信号,如速度、转矩或位置等,经过逻辑判断和计算后,产生相应的输出信号,用于驱动电动机。
例如,当控制信号表示需要加速时,控制器会增大输出信号的频率或幅值,从而提供更多的功率给电动机以实现加速。
此外,电机控制器还涉及信号处理。
通过传感器,控制器可以实时监测电动机的运行状态、温度、转速等信息,并将其转化为数字信号,用于控制电路中的逻辑判断和计算。
同时,电机控制器还可以通过接收来自外部设备或系统的通信信号,实现与其他设备的联动和数据交互。
综上所述,电机控制器的工作原理主要包括电路的建立与运行、逻辑控制和信号处理。
通过完成这些功能,电机控制器可以准确地控制电动机的运行,实现各种运动需求,提高系统的效率和性能。
简述电机控制器的工作原理及应用一、电机控制器的工作原理电机控制器是一种通过控制电流和电压来调节电机运行的装置。
它将输入的电源能量转化为输出的机械能,使电机能够按照需要的速度和方向进行运转。
1.电机控制器的组成部分电机控制器主要包含以下几个组成部分:–电源模块:提供电源能量给电机进行驱动;–控制模块:负责控制电流和电压,调节电机的速度和方向;–保护模块:监测电机的工作状态,一旦出现异常情况,自动停止电机工作,以保护电机和控制器的安全;–接口模块:用于与其他设备进行通信和数据交换;–散热模块:散热措施,确保电机控制器在工作过程中不过热。
2.电机控制器的工作过程电机控制器的工作过程如下所示:–输入电源:将电源接入电机控制器中;–控制信号:通过输入控制信号,控制电机运行的速度和方向;–电压转换:电机控制器将电源的直流电压转换为适合电机工作的交流电压;–电流调节:电机控制器通过调节电流大小,控制电机的速度;–保护监控:电机控制器监控电机的温度、电流、电压等参数,一旦出现异常情况,及时停止电机工作,保护电机和控制器的安全。
3.电机控制器的工作原理电机控制器的工作原理主要包括以下几个方面:–电流控制:电机控制器通过控制电流大小,改变电机的转速。
通过调节电流的大小,可以控制电机的加速度和减速度,从而实现电机的速度控制;–电压控制:电机控制器通过控制电压的大小,影响电机的转矩。
改变电压的大小,可以调节电机的输出功率和负载能力;–PWM调节:脉冲宽度调制(PWM)是电机控制器常用的调节方式之一。
通过控制PWM信号的占空比,可以改变电机的平均电压和平均电流,实现电机的精确控制;–速度反馈:一些高精度的电机控制器还会添加速度传感器,实时监测电机的转速。
通过速度反馈,可以更精确地控制电机的转速和位置。
二、电机控制器的应用电机控制器广泛应用于各个领域的电机驱动系统中,下面列举几个常见的应用场景:1.工业自动化电机控制器在工业自动化领域起到举足轻重的作用。
电动机控制器的电路原理电动机控制器是电动机驱动系统的核心部件,其主要功能是控制电动机的运行和停止,实现电机的速度控制、方向控制、启动控制等。
电动机控制器的工作原理可大致分为激励部分和功率部分两部分。
一、激励部分电动机控制器激励部分主要由电源、电荷电容和触发器组成。
其作用是提供控制信号,驱动功率部分控制电机的运行。
电源可以是交流或直流电源,电荷电容则起到过滤杂波、提供平稳直流电源的作用,触发器则接收控制信号后输出脉冲信号,实现电机的启动、停止、正反转等功能。
二、功率部分电动机控制器功率部分主要由功率管、继电器和电感等组成。
其作用是将控制信号转化为对电机的驱动信号,实现电机的速度、转向、停止控制。
功率管决定了控制器的额定电流和工作效率,继电器起到开关功率粘结的作用,电感则用于降低电磁干扰。
在电动机控制器的具体实现中,常见的控制方式主要包括PWM控制、电阻调速和矢量控制等。
三、PWM控制PWM控制是一种常见的电机控制方式,其基本原理是通过改变控制信号的占空比,使得电机的平均电压和平均电流发生变化,进而实现电机的调速控制。
PWM 控制方式具有控制精度高、效率高、马达声音小等优点,因此在各类电动机控制中得到广泛应用。
四、电阻调速电阻调速是一种通过外接电阻改变电动机电阻,从而达到变速调节的方法。
电阻调速通过改变电路中电阻的大小来调节电机的速度。
电阻调速的优点是结构简单,调速可靠,但由于效率低,散热需要足够的时间,才能升高输出功率,所以其在精度、响应速度上远弱于其他调速方法。
五、矢量控制矢量控制是一种通过对电机电流、位置、角度等参数进行精准和复杂的计算控制,在物理意义上模拟机械矢量偏转和旋转的方法。
它通过实时、准确的控制来实现电机的高效、精确调节。
矢量控制方法一般灵活易变,能够应对较复杂的情况下,需要计算机系统加持,并有一定噪声处理技巧。
这种方法比传统的调速方法控制精度更高,响应更快,在传统的高性能应用领域获得了广泛的应用。
电机控制器结构及工作原理
电机控制器是控制电机运行的关键设备,它通常由电源模块、信号接收模块、控制算法模块和功率驱动模块等几个基本组成部分构成。
电源模块负责将外部供电转换为电机所需的工作电压和电流。
它能够根据电机的需求提供稳定的电力支持。
信号接收模块负责接收来自外部的控制信号,这些信号可以是通过按钮、开关或者其他方式传递给电机控制器的。
控制算法模块使用一系列的算法对接收到的信号进行处理和分析,计算出电机应该运行的速度、转向等参数。
其中,PID控制算法广泛应用于电机控制中,通过精确调整比例、积分和微分的参数,能够实现准确的控制效果。
功率驱动模块是电机控制器的核心部分,它负责根据控制算法模块计算出的参数,实时地控制电机的驱动方式。
通常,功率驱动模块会给电机提供相应的控制信号,调整电机的速度和方向。
工作原理方面,当外部控制信号传递到电机控制器时,信号接收模块将对其进行解码,然后将解码后的信号传递给控制算法模块。
控制算法模块根据接收到的信号和预设的参数,经过计算后生成一个标准化的控制信号。
此时,功率驱动模块接收到标准化的控制信号,将其转换为适当的电流和电压输出,驱动电机正常运行。
总结起来,电机控制器通过协调电源模块、信号接收模块、控制算法模块和功率驱动模块等组成部分的合作,实现对电机的精确控制和驱动。
这样可以确保电机能够在特定的条件下正常运行,并根据需要改变速度和方向。
电机控制器的作用和结构组成一、电机控制器的作用电机控制器作为电机系统的核心部件,发挥着至关重要的作用。
其主要功能包括以下几个方面:1.电机驱动与控制:电机控制器最基本的作用就是驱动和控制电机。
通过调节电机的输入电压或电流,控制器可以实现电机的启动、停止、加速、减速以及方向控制等功能,以满足各种应用需求。
2.能源转换:电机控制器在将电能转换为机械能的同时,还承担着将直流电转换为交流电或反之亦然的任务。
根据应用需求,电机控制器可以实现不同类型电机的能源转换。
3.保护功能:电机控制器具备过流、过压、欠压等保护功能,能够实时监测电机的运行状态。
当电机出现异常情况时,控制器会自动采取保护措施,如切断电源、发出警报等,以防止设备损坏和确保人员安全。
4.通讯功能:现代电机控制器通常具备通讯功能,可以通过总线或网络与其他设备进行数据交换,实现远程监控和控制。
这大大提高了系统的智能化和便捷性。
5.集成化控制:电机控制器可以与其他控制系统集成,实现更高级别的自动化控制。
例如,它可以与PLC(可编程逻辑控制器)或工业PC等设备协同工作,完成复杂的自动化任务。
二、电机控制器的结构组成电机控制器主要由以下几个部分组成:1.主电路:主电路是电机控制器的核心部分,用于驱动和控制电机。
它包括功率电子器件(如晶体管、可控硅等)、输入输出电路以及保护电路等。
这些器件协同工作,实现了电能的转换和电机的控制。
2.控制电路:控制电路是电机控制器的指挥中心,负责接收外部信号并根据指令产生相应的控制信号。
控制电路通常包括微控制器、数字信号处理器(DSP)、功率模块等部件,用于实现各种复杂的控制算法。
3.检测电路:检测电路负责对电机的运行状态进行实时监测,并将相关数据反馈给控制电路。
检测电路通常包括电流传感器、电压传感器、温度传感器等部件,用于监测电机的电流、电压、温度等参数。
4.驱动电路:驱动电路是连接控制电路和主电路的桥梁,负责将控制信号转换为适合驱动电机的电压或电流信号。