基于CAN总线的数据监控系统设计
- 格式:pdf
- 大小:1.07 MB
- 文档页数:3
基于CAN总线的数据采集与控制系统设计郝寿朋;刘瑞玲【摘要】In order to ensure real-time and reliable data transmission, solve the problem that the data is prone to be interfered in the process of data transmission, and ensure the capability of the data acquisition and control system, CAN (controller area network) bus is taken as the fieldbus in the system to realize data transmission. CAN is a kind of serial communication network that supports the distributed control and the real time control, and has the characteristics of high performance and high reliability. The repeated tests for the hardware and software of the system demonstrates the capability of the system, and embodies the obvious advantage of CAN bus in the aspects of the communication capability, reliability, real time, and so on.%为了保证数据传输的实时性、可靠性,解决数据传输过程中易受干扰的问题,并保证数据采集和控制系统的性能.采用CAN总线作为现场总线来实现数据传输.经过对系统软硬件在不同环境下的多次测试,验证了该系统的性能,同时也体现了CAN总线在通信能力、可靠性和实时性等方面的明显优势.【期刊名称】《现代电子技术》【年(卷),期】2011(034)008【总页数】4页(P36-38,42)【关键词】CAN总线;数据采集;控制系统;串行通信【作者】郝寿朋;刘瑞玲【作者单位】中国海洋大学,信息科学与工程学院,山东,青岛,266100;临沂市高级技工学校,山东,临沂,276021【正文语种】中文【中图分类】TN911-340 引言随着计算机网络上的高速发展,使得信息的交流与共享变得空前广泛和自如,而这项技术也渗入到自动化领域的变革当中,现场总线(Fieldbus)由此应运而生,开创了工业控制的新篇章。
引言锅炉是通过燃烧加热工质来提供热能动力的重要设备,同时又是承压、受火、有爆炸危险而又被各行各业普遍使用的特殊设备。
所以实时监控锅炉的运行状态,及时、准确地发现锅炉运行中的事故至关重要。
传统的锅炉监控系统在测量手段和使用的传感器方面都存在很大的缺陷。
以温度检测为例,早期采用的热电偶电桥法,测试过程复杂;而采用集成的半导体模拟温度传感器需要大量的传输电缆,成本高且不易维护。
CAN总线是一种多主机控制标准,具有物理层和数据链路层的协议、多主节点、无损仲裁、高可靠性及扩充性能好等特点;能有效支持分布式控制系统的串行通信网络。
一方面,其通信方式灵活,可实现多主方式工作,还可实现点对点、点对多点等多种数据的收发;另一方面,能在相对较大的距离间进行较高位速率的数据通信。
本系统是由上位机对多个并列的承压锅炉监控单元进行控制管理,各监控单元之间要进行快速的数据传输。
CAN总线能很好地满足该系统的要求。
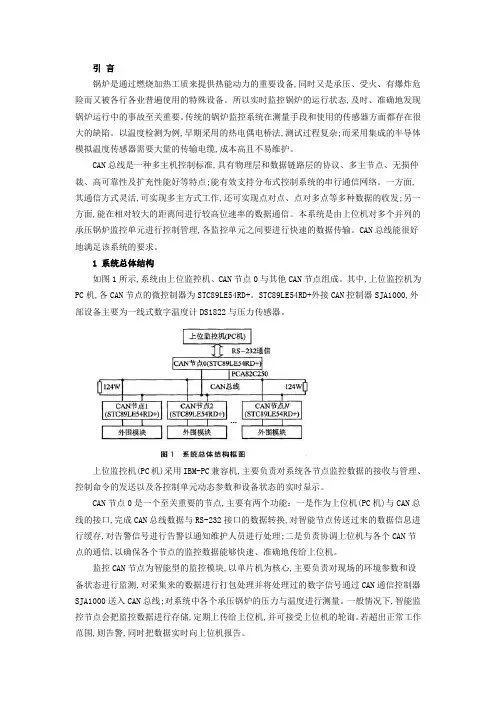
1 系统总体结构如图1所示,系统由上位监控机、CAN节点0与其他CAN节点组成。
其中,上位监控机为PC机,各CAN节点的微控制器为STC89LE54RD+。
STC89LE54RD+外接CAN控制器SJA1000,外部设备主要为一线式数字温度计DS1822与压力传感器。
上位监控机(PC机)采用IBM-PC兼容机,主要负责对系统各节点监控数据的接收与管理、控制命令的发送以及各控制单元动态参数和设备状态的实时显示。
CAN节点0是一个至关重要的节点,主要有两个功能:一是作为上位机(PC机)与CAN总线的接口,完成CAN总线数据与RS-232接口的数据转换,对智能节点传送过来的数据信息进行缓存,对告警信号进行告警以通知维护人员进行处理;二是负责协调上位机与各个CAN节点的通信,以确保各个节点的监控数据能够快速、准确地传给上位机。
监控CAN节点为智能型的监控模块,以单片机为核心,主要负责对现场的环境参数和设备状态进行监测,对采集来的数据进行打包处理并将处理过的数字信号通过CAN通信控制器SJA1000送入CAN总线;对系统中各个承压锅炉的压力与温度进行测量。
关键词:煤矿安全;CAN总线;dsPIC30F6012;监控系统引言煤矿安全监控系统能够对矿井下CH4、CO、温度、通风、粉尘等环境参数及机电设备的开关状态进行准确、实时的监测和报警,减少事故的发生,对煤矿安全生产具有非常重要的意义。
但是,煤矿井下环境十分恶劣,监测数据量大,监测点多且分散,采集的数据需要通过长距离通信线路上传,易受干扰影响,对监测系统的可靠性、实时性提出了严峻的考验。
CAN总线是一种应用于现场设备与控制室之间,支持分布式、实时控制的现场总线网络;采用双绞线传输、全分散、全数字化,抗干扰能力强,可构建多变量、多点检测的通信系统;可靠性高、实时性好,传输速率高,最高可达1Mb/s,最大传输距离为5km,完全满足煤矿安全监控的要求。
因此,本文设计了一种基于CAN总线的煤矿安全监控系统,现场智能节点以单片机dsPIC30F6012为检测控制核心,检测井下环境参数,并通过CAN总线实时、远距离上传至地面上位监控主机进行数据分析,全面实现井下安全生产监控。
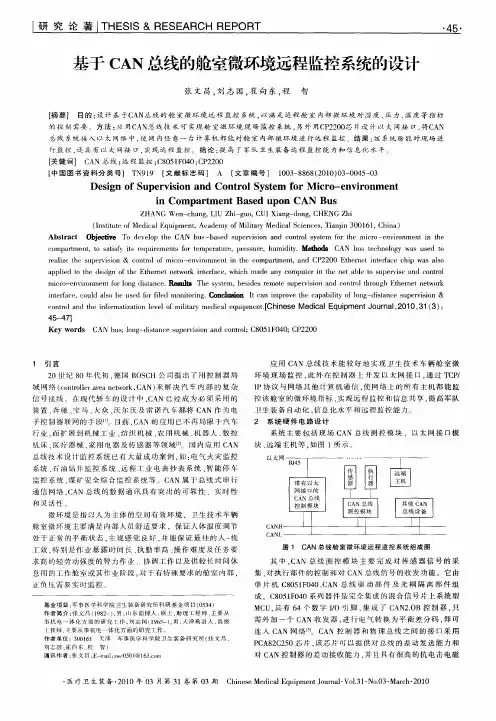
1煤矿安全监控系统概述煤矿安全监控系统的总体结构如图1所示,由现场检测节点电路及测量传感器、CAN总线网络、CAN总线适配卡、上位机组成。
现场检测节点收集有害气体含量、温度等矿用传感器检测的环境数据,进行分析处理并就地显示及异常报警,同时通过CAN接口将数据实时发送到CAN总线上,也可通过CAN接口接收上位机下达的指令信息。
CAN总线可挂接110个检测节点,通过网桥方式可扩充节点数量,使监控不留死角。
上位PC机通过CAN适配卡获取由CAN总线传输的井下监测数据,并进行数据分析处理及存储,形成各种报表、异常报警及控制指令的下达。
2系统硬件设计(1)现场检测节点设计现场检测节点电路结构图如图2所示,节点以单片机dsPIC30F6012为核心,井下传感器输出的模拟信号送入dsPIC30F6012的片内A/D转换器,单片机以此获取井下环境参数信息,进行显示及与设定的限值进行比较,对异常情况进行报警;由单片机片内CAN总线控制器及高速光耦6N137、CAN总线收发器TJA1050T构成CAN 通信接口电路,用于数据的实时传输。
基于CAN总线的煤矿监测监控系统分析摘要:煤矿监控系统中CAN通信技术的设计,是通过对现有系统通信方式的比较和存在问题的综合分析,选择最新通信的数字化设计方案,具有良好的检测效果。
基于此,笔者将分析与探讨基于CAN总线的煤矿监测监控系统。
关键字:CAN总线;煤矿监测监控系统分析;监控系统引言:做好煤矿监测监控和确保煤矿安全生产问题,是煤炭作为国民经济支柱产业安全高速可持续发展的前提。
特别是施工企业要对煤矿井下各种灾害性气体、运输设备、工况环境、矿山机电设备等设备进行综合监测,才能保证整个煤矿的安全运行。
一、基于CAN总线的煤矿监测基于CAN总线的煤矿监测监控主要是由操作站、控制站及其网络组成,有效提高了检测的效率,可以避免出现连锁故障的情况。
同时操作人员可以掌握操作过程、预警情况和数据,进而指导施工企业采取针对性措施。
二、基于CAN总线的安全监控系统的优点CAN总线的运行方式为多主机运行,任何节点都可以通过干线随时向其他干线传输信息。
其次CAN总线带有无损自动判断技术,当系统中同时出现的两个小节点向,CAN总线传输信息时,下层节点可以暂停传输,等待高层节点优先传输后再传输,进而有效地缩短了总线的判断时间。
其次在CAN总线模式下,一个节点可以传输到一个节点,一个节点可以传输到多个节点,一个节点可以传输到所有节点。
特别是CAN数据传输精度高、速度快,实现了信息的快速共享。
特别是CAN总线采用短帧传输,可以与检测技术相结合,提高了检测的正确率。
最后是CAN具有完善的通信协议优势,该系统开发简单,可直接由CAN总线控制芯片实现。
此外CAN的成本低,与集中式监控系统相比,节省了大量电缆等设备的采购,当前CAN总线模式的煤矿安全监控系统的工程造价也大大提高减少。
三、基于CAN总线的煤矿监测监控系统(一)总线扩展,多公里范围内复杂系统的监控从理论上讲CAN总线中的节点数目是没有限制的,但节点数目小于110的设置有利于保证日常通信的质量。

基于CAN总线信号采集系统电路设计随着汽车工业的进步,CAN总线系统逐渐成为汽车电气通讯领域的主流传输技术。
CAN总线采集系统是目前汽车电气采集数据的基础,它可以采集引擎、变速器、ABS、空调、电子油门等多种设备的信号并实时传输到控制器,从而实现车辆状态的监测和控制。
本文将详细探讨基于CAN总线信号采集系统电路设计。
一、系统设计方案系统的设计方案,包括了CAN芯片的选择、系统的拓扑结构、信号输入方式、信号处理与转化、输出方式等等。
根据实际需求,系统主要分为以下两个部分:(1)CAN节点部分CAN节点部分是CAN信号采集系统的核心部分,主要由MCU单片机和CAN收发器构成。
MCU单片机是实现系统的控制和数据处理,它接收各个传感器的模拟量信号,并将其转换成数字量信号,再将其打包成CAN帧输出给CAN总线。
而CAN收发器则是实现在CAN总线上的数据传输,它主要负责对CAN总线上的信号进行收发。
CAN节点部分的实现过程主要包括以下五个步骤:Step 1. 选定MCU并搭建系统选定一款MCU芯片,例如STC12C5A60S2,搭建工程并进行配置。
在搭建过程中,需要注意向MCU传输指令的方式,最常用的方式是串口传输。
Step 2. 选择CAN收发器并接入CAN总线在本系统中,我们选择了二代高速CAN收发器MCP2515,它可以实现在高速的CAN总线中进行数据传输。
将CAN收发器与MCU单片机进行连接,然后接入CAN总线。
Step 3. 建立CAN节点的通信协议在CAN节点与CAN总线建立通信协议之前,我们要先了解CAN的工作机制。
CAN总线实际上是一条双向通路,任意一个节点都可以接收和发送数据。
每个节点都有自己的地址码,通过地址码来定位数据的发送和接收。
因此,在CAN节点与CAN总线建立通信协议时,需要确定每个节点的地址码以及数据包的格式。
Step 4. 采集模拟量信号在CAN节点部分,MCU单片机需要采集各个传感器的模拟量信号,并将其转换成数字信号,再将其打包成CAN帧输出给CAN总线。
现代电子技术Modern Electronics TechniqueSep. 2023Vol. 46 No. 182023年9月15日第46卷第18期0 引 言多数城市的轨道交通建设[1‐2]较复杂,所采用的监控设备存在寿命短、监控效率差的问题。
针对监控设备的不足,西班牙早已采用综合监控系统(Integrated Supervisory Control System, ISCS )对城市轨道交通进行实时监控。
为了解决轨道交通监控中的问题,需要对城市轨道交通综合监控系统进行设计。
汤石男等提出一种基于云平台的城市轨道交通综合监控系统设计方案[3],该方法根据云平台机制简化应用软件,同时优化监控系统的总体构架。
通过云平台的特点,将轨道交通控制中心及其数据库引入到云平台中,以此降低数据不能同步的风险;再根据降低结果实时监控轨道交通的运行状态。
但是,该方法引入的数据DOI :10.16652/j.issn.1004‐373x.2023.18.012引用格式:黄周彬.基于CAN 总线的城市轨道交通综合监控系统设计[J].现代电子技术,2023,46(18):61‐65.基于CAN 总线的城市轨道交通综合监控系统设计黄周彬(天津大学, 天津 300072)摘 要: 城市轨道交通监控涉及车内监控分站和人员跟踪分站等多个方面,其数据采集和处理的实时性、准确性会影响监控系统的运行性能。
为提高监控系统CPU 利用率和安全性,文中基于CAN 总线技术设计一种城市轨道交通综合监控系统。
基于CAN 总线设置城市轨道交通综合监控框架,硬件部分选择DSP 数字信号处理器实现多节点数字信号处理;采用dasRdb 系统数据库,利用实时数据服务器的空间分配技术处理数据。
软件设计方面,在IndasMake 开发环境中分析IndasIBNS 组态软件,分别设计城市轨道交通综合监控模块、系统权限与安全管理模块、网络监控功能模块、监控报警模块。