倒立摆小车的稳定控制设计
- 格式:doc
- 大小:12.50 KB
- 文档页数:2
自动控制理论课程设计倒立摆系统的控制器设计学生姓名:指导教师:班级:二O一三课程设计指导教师评定成绩表:指导教师评定成绩:指导教师签名:年月日重庆大学本科学生课程设计任务书目录一、倒立摆控制系统概述 (6)二、数学模型的建立 (7)三、系统开环响应分析 (8)四、根轨迹法控制器设计 (9)4.1根轨迹分析 (9)4.2系统根轨迹设计 (10)4.3校正后系统性能分析 (12)4.4系统控制器的调整 (12)五、频域法控制器设计 (14)5.1频域法分析 (14)5.2串联校正器的选择与设计 (14)5.3系统的仿真 (17)六、PID控制器设计 (18)七、总结及心得体会 (20)八、参考教材 (20)一、倒立摆控制系统概述倒立摆装置被公认为自动控制理论中的典型实验设备,也是控制理论教学和科研中控对象,运用控制手段可使之具有良好的稳定性。
通过对倒立摆系统的研究,不仅可以解决控制中的理论问题,还能将控制理论所涉及的三个基础学科:力学、数学和电学(含计算机)有机的结合起来,在倒立摆系统中进行综合应用。
在多种控制理论与方法的研究和应用中,特别是在工程实践中,也存在一种可行性的试验问题,将其理论和方法得到有效的经验,倒立摆为此提供一个从控制理论通往实践的桥梁。
在稳定性控制问题上,倒立摆既具有普遍性又具有典型性。
倒立摆系统作为一个控制装置,结构简单、价格低廉,便于模拟和数字实现多种不同的控制方法,作为一个被控对象,它是一个高阶次、不稳定、多变量、非线性、强耦合的快速系统,只有采用行之有效的控制策略,才能使其稳定。
倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智能控制、模糊控制及人工神经元网络等多种理论和方法,都能在倒立摆系统控制上得到实现,而且当一种新的控制理论和方法提出以后,在不能用理论加以严格证明时,可以考虑通过倒立摆装置来验证其正确性和实用性。
倒立摆的种类:悬挂式、直线、环形、平面倒立摆等。
自动控制原理课程设计——倒立摆系统控制器设计-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN一、引言支点在下,重心在上,恒不稳定的系统或装置的叫倒立摆。
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
问题的提出倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自有连接(即无电动机或其他驱动设备)。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
倒立摆的控制方法倒立摆系统的输入来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。
直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。
作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。
当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。
为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。
本次设计中我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型,然后通过开环响应分析对该模型进行分析,并利用学习的古典控制理论和Matlab /Simulink仿真软件对系统进行控制器的设计,主要采用根轨迹法,频域法以及PID(比例-积分-微分)控制器进行模拟控制矫正。
2 直线倒立摆数学模型的建立直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一,直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件。
基于倒立摆原理的自平衡车设计与控制在现代城市生活中,自行车和电动车成为了主要的出行工具。
但是自平衡车,在一些特殊的场合下也成为了一款非常实用的出行工具。
自平衡车是一种通过倒立摆原理来维持自身平衡的机动车辆。
它是一种结合了实用性和科技化的产品。
因此,本文将探讨基于倒立摆原理的自平衡车的设计与控制。
首先介绍自平衡车的原理。
自平衡车的运行原理和大众公认的模型飞机和直升机的原理有些相似。
主要的原理是通过控制电机、车轮和车体来实现平衡。
在自平衡车的设计中,需要考虑车体的自身重量、电机的功率、车轮的直径和悬挂的高度等参数。
通过这些参数的控制,就可以实现自身的平衡,并且对于一些需求,可以通过外在的参数进行调节。
其次,自平衡车的设计。
在自平衡车的设计中,需要考虑到车体的平衡,也就是倒立摆原理的核心原理。
同时,还需要考虑底盘的设计,包括车轮的大小、形状和材料等。
另外,车轮的传动系统也需要进行合理的设计。
对于电机的配置,需要考虑到功率和电池的容量。
同时还需要考虑到自平衡车的控制系统。
在自平衡车的设计中,最重要的是控制系统的设计,否则车辆无法控制,并且很难对其进行自动驾驶等高级功能的实现。
对于自平衡车的控制系统,现在主要有两种方法:一种是使用微处理器或单片机等微型电子计算机,利用传感器和控制算法实现对车体的控制;另一种是使用PID控制算法来控制车辆。
无论哪种控制方式,都需要高精度的传感器和高质量的控制电路。
通过这些设备,我们可以实现对自平衡车的高效控制。
最后,自平衡车的控制方法。
在控制自平衡车的过程中,关键是要控制好车辆的速度和平衡,以保证行车的安全性。
在进行控制时,首先需要进行加速,加速的速度和旋转方向需要结合起来,控制到合适的范围。
对于平衡的情况下,车辆会自动维持平衡,但是如果失去平衡,需要及时调整车体的角度,以避免车辆翻转或其他意外情况。
总之,基于倒立摆原理的自平衡车是一款非常实用的自动化轻型车辆。
通过合理的设计和高效的控制,可以实现对车辆的高价值化设计和生产,为我们的社会生产力提供了新的思路。
![直线小车一级倒立摆控制策略研究毕业设计[管理资料]](https://uimg.taocdn.com/f26fe4f590c69ec3d4bb75c7.webp)

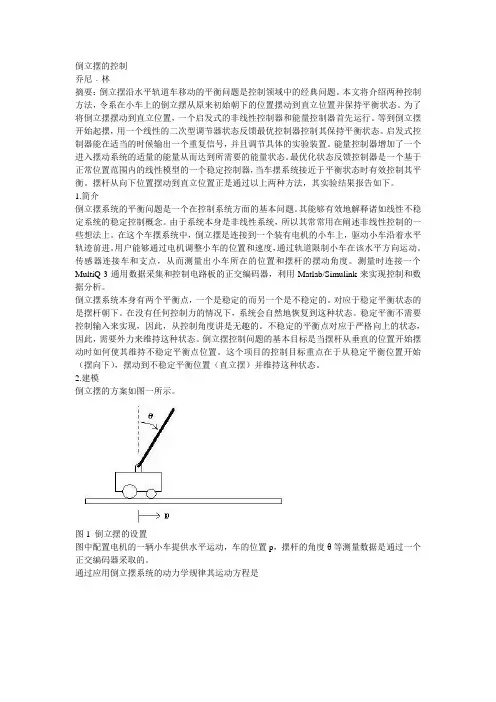
倒立摆的控制乔尼﹒林摘要:倒立摆沿水平轨道车移动的平衡问题是控制领域中的经典问题。
本文将介绍两种控制方法,令系在小车上的倒立摆从原来初始朝下的位置摆动到直立位置并保持平衡状态。
为了将倒立摆摆动到直立位置,一个启发式的非线性控制器和能量控制器首先运行。
等到倒立摆开始起摆,用一个线性的二次型调节器状态反馈最优控制器控制其保持平衡状态。
启发式控制器能在适当的时候输出一个重复信号,并且调节具体的实验装置。
能量控制器增加了一个进入摆动系统的适量的能量从而达到所需要的能量状态。
最优化状态反馈控制器是一个基于正常位置范围内的线性模型的一个稳定控制器,当车摆系统接近于平衡状态时有效控制其平衡。
摆杆从向下位置摆动到直立位置正是通过以上两种方法,其实验结果报告如下。
1.简介倒立摆系统的平衡问题是一个在控制系统方面的基本问题。
其能够有效地解释诸如线性不稳定系统的稳定控制概念。
由于系统本身是非线性系统,所以其常常用在阐述非线性控制的一些想法上。
在这个车摆系统中,倒立摆是连接到一个装有电机的小车上,驱动小车沿着水平轨迹前进。
用户能够通过电机调整小车的位置和速度,通过轨道限制小车在该水平方向运动。
传感器连接车和支点,从而测量出小车所在的位置和摆杆的摆动角度。
测量时连接一个MultiQ-3通用数据采集和控制电路板的正交编码器,利用Matlab/Simulink来实现控制和数据分析。
倒立摆系统本身有两个平衡点,一个是稳定的而另一个是不稳定的。
对应于稳定平衡状态的是摆杆朝下。
在没有任何控制力的情况下,系统会自然地恢复到这种状态。
稳定平衡不需要控制输入来实现,因此,从控制角度讲是无趣的。
不稳定的平衡点对应于严格向上的状态,因此,需要外力来维持这种状态。
倒立摆控制问题的基本目标是当摆杆从垂直的位置开始摆动时如何使其维持不稳定平衡点位置。
这个项目的控制目标重点在于从稳定平衡位置开始(摆向下),摆动到不稳定平衡位置(直立摆)并维持这种状态。
集成度、更快的CPU、更大容墩的存储器,内置有波特率发生器和FIFO缓冲器。
提供高速、同步串西葶辩标准舞步串秘。
有翡芹秀集成了磊内和采样/傈持电路,可键供嘲输出。
DSP器件其有高速的数摄运算挠力。
DSP器件比16位单片机单指令执行快8-10倍,完成一次乘法运算快16—30倍潮。
DSP器件还提供了高度专业化的指令集,提高7FFT抉速傅里婶变换秘滤波器的运算速度。
此终,DSP器件提供了JTAG接心,具露更先进的歼发工疑,批辍生产测试更方便,开发工具可实现全空间透明仿真,不占用彝l声柽露资源。
软势配餐汇编/链接C编译嚣、C滚代玛镶试嚣。
DSP慈筹是专为遘纷数字信号处理运算而设计的微处理器,在实时快速实现备种数字信号处理算法方面有缀牵越熬馁能。
在本系统中,我们采用了GT一400运动控制器,其核心由ADSP2181数字信号处联器和FPGA组成,可以同步控稍疆个运动轴,实现多轴协谪运动躺。
该运动控镧器是一块带寅PCI标准总线,以IBM-PC或兼容机作为主机的应用插扳。
它具宥功能强、价格低、使用方便的特点,用户需鬻一台I明一P1c或兼容机、~块运动控制掇、电缆、一块接掰壤予叛、稠暇毫极、翅缀邀瓿驱动器秘於部接口电嚣等硬移。
这戮部终之勰豹逐接示意图如下图所示。
图2.2采用四轴运动控制器组成的控剩系统框图该运动控制器提供C语言炳数瘁秘Windows动态链按摩,实现复杂的控制功能。
用户能够将这些控制函数与自已控制系统所需的数据处理、界酾显示、用户接口等成援爨痔模块集藏在一起,建造符合特定应愚要求憨控铡系统,{:走适应务秘痤翅领域骢要求。
图5.ISirnalink横型浏览图3.专用模块库作为Simulink建模系统的补充,MathWorks公司还开发了专用功能块程序包,如DSPBlockset和C<maunicationBlockset等。
通过健弼这黢程序包,用户可以迅速酶对系统进行建模、仿真帮分耩.芟重要静爨糟户还可豁霹系统模鍪遴簿代码玺成。
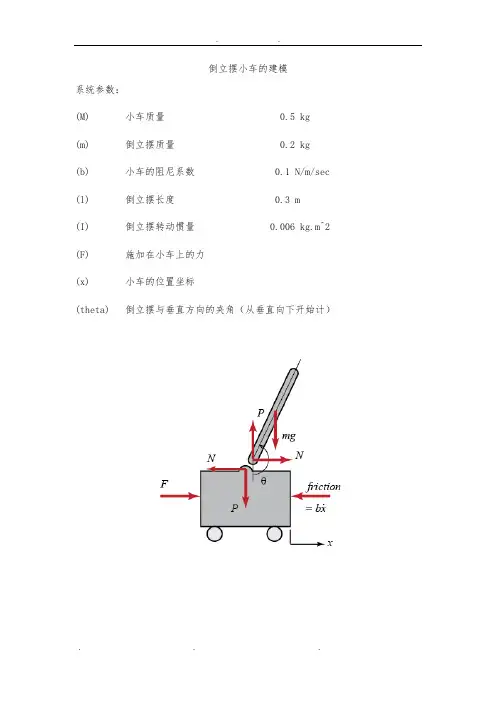
倒立摆小车的建模系统参数:(M) 小车质量 0.5 kg (m) 倒立摆质量 0.2 kg (b) 小车的阻尼系数 0.1 N/m/sec (l) 倒立摆长度 0.3 m(I) 倒立摆转动惯量 0.006 kg.m^2 (F) 施加在小车上的力(x) 小车的位置坐标(theta) 倒立摆与垂直方向的夹角(从垂直向下开始计)动力学建模:考虑水平方向的力矩平衡:以上两式合并得到:考虑垂直施加在倒立摆上的力及质心力矩平衡方程:消去 P N ,得到如下公式简化:简化后模型:传递函数模型:设:PID 控制:或者如下表示:M = 0.5; m = 0.2; b = 0.1; I = 0.006; g = 9.8; l = 0.3; q = (M+m)*(I+m*l^2)-(m*l)^2; s = tf('s'); P_pend = (m*l*s/q)/(s^3 + (b*(I + m*l^2))*s^2/q - ((M + m)*m*g*l)*s/q - b*m*g*l/q);Kp = 1; Ki = 1; Kd = 1; C = pid(Kp,Ki,Kd); T = feedback(P_pend,C);t=0:0.01:10; impulse(T,t) title('Response of Pendulum Position to an Impulse Disturbance under PID Control: Kp = 1, Ki = 1, Kd = 1');Kp = 100; Ki = 1; Kd = 1; C = pid(Kp,Ki,Kd); T = feedback(P_pend,C); t=0:0.01:10; impulse(T,t) axis([0, 2.5, -0.2, 0.2]); title('Response of Pendulum Position to an Impulse Disturbance under PID Control: Kp = 100, Ki = 1, Kd = 1');Kp = 100; Ki = 1; Kd = 20; C = pid(Kp,Ki,Kd); T = feedback(P_pend,C); t=0:0.01:10; impulse(T,t) axis([0, 2.5, -0.2, 0.2]); title('Response of Pendulum Position to an Impulse Disturbance under PID Control: Kp = 100, Ki = 1, Kd = 20');这时,小车的位置?传递函数:P_cart = (((I+m*l^2)/q)*s^2 - (m*g*l/q))/(s^4 + (b*(I + m*l^2))*s^3/q - ((M + m)*m*g*l)*s^2/q - b*m*g*l*s/q); T2 = feedback(1,P_pend*C)*P_cart; t = 0:0.01:5; impulse(T2, t); title('Response of Cart Position to an Impulse Disturbance under PID Control: Kp = 100, Ki = 1, Kd = 20');基于状态空间方程的倒立摆小车的控制方法设计▪开环根▪(LQR)▪增加补偿▪基于观测器的控制1 状态空间方程设计目标:1.倒立摆倒立状态2.小车向右移动0.2米首先假设系统状态全部测量获得:求开环的根,即A的特征值M = 0.5;m = 0.2;b = 0.1;I = 0.006;g = 9.8;l = 0.3;p = I*(M+m)+M*m*l^2; %denominator for the A and B matrices A = [0 1 0 0;poles =-5.6041-0.14285.56511.检查可控性controllability = 4Q =1 0 0 0 0 0 0 0 0 0 1 00 0 0 0set(get(AX(1),'Ylabel'),'String','cart position (m)')set(get(AX(2),'Ylabel'),'String','pendulum angle (radians)') title('Step Response with LQR Control')K =-1.0000 -1.6567 18.6854 3.4594Q = C'*C;Q(1,1) = 5000;Q(3,3) = 100R = 1;Q =5000 0 0 0 0 0 0 0 0 0 100 0 0 0 0 0 K =-70.7107 -37.8345 105.5298 20.9238增加补偿系数:Cn = [1 0 0 0];sys_ss = ss(A,B,Cn,0);Nbar = rscale(sys_ss,K)Nbar =-70.7107sys_cl = ss(Ac,Bc*Nbar,Cc,Dc,'statename',states,'inputname',inputs,'outputname ',outputs);t = 0:0.01:5;r =0.2*ones(size(t));[y,t,x]=lsim(sys_cl,r,t);[AX,H1,H2] = plotyy(t,y(:,1),t,y(:,2),'plot');set(get(AX(1),'Ylabel'),'String','cart position (m)')set(get(AX(2),'Ylabel'),'String','pendulum angle (radians)')title('Step Response with Precompensation and LQR Control')基于能观器的控制检查能观性:ob = obsv(sys_ss);observability = rank(ob)observability =4能观器的根要比控制器的根快5到10倍的收敛控制器的根:poles = eig(Ac)poles =-8.4910 + 7.9283i-8.4910 - 7.9283i-4.7592 + 0.8309i-4.7592 - 0.8309i置根法设置能观器的根:P = [-40 -41 -42 -43];L = place(A',C',P)'L =1.0e+03 *0.0826 -0.00101.6992 -0.0402-0.0014 0.0832-0.0762 1.7604Ace = [(A-B*K) (B*K);zeros(size(A)) (A-L*C)]; Bce = [B*Nbar;zeros(size(B))];Cce = [Cc zeros(size(Cc))]; Dce = [0;0];Function [Nbar]=rscale(a,b,c,d,k)% Given the single-input linear system:% .% x = Ax + Bu% y = Cx + Du% and the feedback matrix K,%% the function rscale(sys,K) or rscale(A,B,C,D,K)% finds the scale factor N which will% eliminate the steady-state error to a step reference% for a continuous-time, single-input system% with full-state feedback using the schematic below:%% /---------\% R + u | . |% ---> N --->() ---->| X=Ax+Bu |--> y=Cx ---> y% -| \---------/% | |% |<---- K <----|%%8/21/96 Yanjie Sun of the University of Michigan% under the supervision of Prof. D. Tilbury%6/12/98 John Yook, Dawn Tilbury revisederror(nargchk(2,5,nargin));% --- Determine which syntax is being used ---nargin1 = nargin;if (nargin1==2), % System form[A,B,C,D] = ssdata(a);K=b;elseif (nargin1==5), % A,B,C,D matricesA=a; B=b; C=c; D=d; K=k;else error('Input must be of the form (sys,K) or (A,B,C,D,K)') end;% compute Nbars = size(A,1);Z = [zeros([1,s]) 1]; N = inv([A,B;C,D])*Z'; Nx = N(1:s);Nu = N(1+s);Nbar=Nu + K*Nx;。
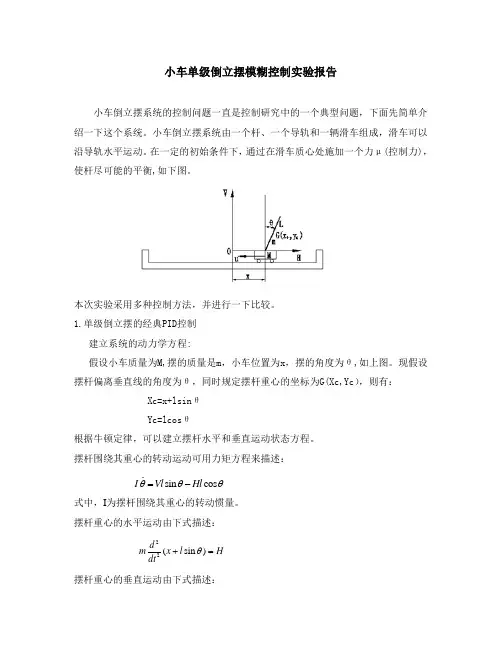
小车单级倒立摆模糊控制实验报告小车倒立摆系统的控制问题一直是控制研究中的一个典型问题,下面先简单介绍一下这个系统。
小车倒立摆系统由一个杆、一个导轨和一辆滑车组成,滑车可以沿导轨水平运动。
在一定的初始条件下,通过在滑车质心处施加一个力μ(控制力),使杆尽可能的平衡,如下图。
本次实验采用多种控制方法,并进行一下比较。
1.单级倒立摆的经典PID 控制 建立系统的动力学方程:假设小车质量为M,摆的质量是m ,小车位置为x ,摆的角度为θ,如上图。
现假设摆杆偏离垂直线的角度为θ,同时规定摆杆重心的坐标为G(Xc,Yc ),则有: Xc=x+lsin θ Yc=lcos θ根据牛顿定律,可以建立摆杆水平和垂直运动状态方程。
摆杆围绕其重心的转动运动可用力矩方程来描述: ..sin cos I Vl Hl θθθ=- 式中,I 为摆杆围绕其重心的转动惯量。
摆杆重心的水平运动由下式描述:22(sin )d m x l Hdt θ+=摆杆重心的垂直运动由下式描述:22cos d m l V mgdt θ=-小车的水平运动由下式描述:22d xm u Hdt =-假设θ很小,sin θ≈θ,cos θ≈1。
则以上各式变为: ..I Vl Hl θθ=- 1.1 ....()m x l H θ+= 1.2 0V mg =- 1.3 ..M x u H =- 1.4 由式1.2和1.4得:....()M m x ml u θ++= 1.5 由式1.2和1.3得:....2()I ml ml x mgl θθ++= 1.6 由1.5和1.6可得单级倒立摆方程:..22()()()m m M gl mlu m M I Mml m M I Mml θθ+=-++++222..22()()m gl I ml x u m M I Mml m M I Mml θ+=-++++ 式中,2112I mL =, l=0.5L .控制指标共有四个,即单级倒立摆的摆角θ、摆速.θ,小车位置x 和小车速度.x 。
第1篇一、实验目的本次实验旨在通过搭建小车倒立摆系统,实现对倒立摆的稳定控制,加深对PID控制、LQR控制、状态空间极点配置控制等控制理论的理解,并掌握模型预测控制(MPC)在倒立摆系统中的应用。
二、实验原理倒立摆系统是一个典型的不稳定系统,具有多变量、非线性、强耦合的特性。
通过对倒立摆进行建模,分析其动力学特性,设计合适的控制策略,可以使倒立摆达到稳定状态。
三、实验设备1. 计算机及Matlab软件2. 倒立摆系统,包括小车、摆杆、光电编码器等3. 电机驱动器4. 电源5. 数据采集卡四、实验步骤1. 系统建模(1)建立倒立摆的动力学方程根据牛顿第二定律,倒立摆的动力学方程可以表示为:$$Mx'' + bx' + cx = F$$$$ml^2\theta'' + mgl\sin\theta + bl\theta' = 0$$其中,M为小车质量,m为摆杆质量,l为摆杆长度,b和c为阻尼系数,F为控制力,x为小车位移,θ为摆杆角度。
(2)建立状态空间模型将上述动力学方程转化为状态空间模型:$$\begin{bmatrix}x'\\ \theta'\\ x''\\ \theta''\end{bmatrix} =\begin{bmatrix}0 & 1 & 0 & 0\\ 0 & 0 & 0 & 1\\ \frac{1}{M} & 0 & 0 & 0\\ 0 & 0 & -\frac{mgl}{l^2} & -b\end{bmatrix} \begin{bmatrix}x\\ \theta\\ x'\\ \theta'\end{bmatrix} + \begin{bmatrix}0\\ 0\\ \frac{1}{M}\\0\end{bmatrix}F$$2. 控制策略设计(1)PID控制设计PID控制器,对倒立摆进行控制。
PID控制的一阶倒立摆控制系统设计一阶倒立摆控制系统是一种常见的控制系统,通过PID控制器对倒立摆系统进行稳定控制,使其在一定的时间内达到平衡位置。
本文将详细介绍一阶倒立摆控制系统的设计流程和方法。
1.引言一阶倒立摆控制系统是一类具有非线性动力学特性的控制系统。
其基本结构包含一个摆杆和一个摆杆在垂直方向上运动的小车。
该控制系统的目标是通过调节小车的运动,使摆杆能够在垂直方向上保持平衡。
为了实现这个目标,我们需要设计一个有效的控制方案,并使用PID控制器对系统进行控制。
2.模型建立首先,我们需要建立一阶倒立摆系统的数学模型。
假设摆杆的长度为L,摆杆与水平线的夹角为θ,小车与水平线的位置为x,小车与水平线的速度为v。
根据牛顿运动定律和平衡条件,可以得到如下模型:m*x'=m*a=F(1)M*x'' = -F*l*sin(θ) - b*v (2)I*θ'' = F*l*cos(θ) - M*g*l*sin(θ) (3)其中,m是小车的质量,M是摆杆的质量,l是摆杆的长度,b是摩擦系数,g是重力加速度,I是摆杆的转动惯量。
将式(3)对时间t求导得到:I*θ''' = -b*l*θ' - M*g*l*cos(θ) (4)3.控制设计为了设计PID控制器,我们需要首先将系统模型线性化。
可以将非线性的动力学模型近似为线性模型,并在静态平衡点附近进行线性化。
静态平衡点是系统的平衡位置,满足以下条件:x=0,v=0,θ=0,θ'=0。
我们可以对系统模型进行泰勒级数展开,保留一阶项,得到如下线性化模型:m*x'=F(5)M*x''=-F*l*θ(6)I*θ''=F*l(7)经过线性化,系统的动力学模型变为了一组线性微分方程。
接下来,我们使用PID控制器对系统进行控制。
4.PID控制器设计PID控制器由比例项、积分项和微分项组成,用于校正系统输出与目标值之间的差异。
基于双闭环PID控制的一阶倒立摆控制系统设计一、设计目的倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型例子。
设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统。
二、设计要求倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
实验参数自己选定,但要合理符合实际情况,控制方式为双PID控制,并利用MATLAB进行仿真,并用simulink 对相应的模块进行仿真。
三、设计原理倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机。
计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡。
四、设计步骤首先画出一阶倒立摆控制系统的原理方框图一阶倒立摆控制系统示意图如图所示:分析工作原理,可以得出一阶倒立摆系统原理方框图:一阶倒立摆控制系统动态结构图下面的工作是根据结构框图,分析和解决各个环节的传递函数!1.一阶倒立摆建模在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中:M:小车质量m:为摆杆质量J:为摆杆惯量F:加在小车上的力x:小车位置θ:摆杆与垂直向上方向的夹角l:摆杆转动轴心到杆质心的长度根据牛顿运动定律以及刚体运动规律,可知:(1) 摆杆绕其重心的转动方程为(2) 摆杆重心的运动方程为得(3)小车水平方向上的运动为联列上述4个方程,可以得出一阶倒立精确气模型: 式中J 为摆杆的转动惯量:32ml J = 若只考虑θ在其工作点附近θ0=0附近(︒︒≤≤-1010θ)的细微变化,则可以近似认为: 若取小车质量M=2kg,摆杆质量m=1kg,摆杆长度2 l =1m,重力加速度取g=2/10s m ,则可以得一阶倒立摆简化模型:....0.44 3.330.412x F F θθθ⎧=-⎪⎨⎪=-+⎩拉氏变换 即G 1(s)=;G 2(s)=一阶倒立摆环节问题解决!2.电动机驱动器选用日本松下电工MSMA021型小惯量交流伺服电动机,其有关参数如下:驱动电压:U=0~100V 额定功率:PN=200W额定转速:n=3000r/min 转动惯量:J=3×10-6kg.m2额定转矩:TN=0.64Nm 最大转矩:TM=1.91Nm电磁时间常数:Tl=0.001s 电机时间常数:TM=0.003s经传动机构变速后输出的拖动力为:F=0~16N ;与其配套的驱动器为:MSDA021A1A ,控制电压:UDA=0~±10V 。
单级倒立摆稳定控制实验一.实验目的1.了解单级倒立摆的原理与数学模型的建立;2.掌握LQR控制器的设计方法;3.掌握基于LQR控制器的单级倒立摆稳定控制系统的仿真方法。
二.实验内容图1 一级倒立摆原理图一级倒立摆系统的原理框图如上所示。
系统包括计算机、运动控制卡、伺服机构、倒立摆本体和光电码盘几大部分,组成了一个闭环系统。
光电码盘1将连杆的角度、角速度信号反馈给伺服驱动器和运动控制卡,摆杆的角度、角速度信号由光电码盘2反馈回控制卡。
计算机从运动控制卡中读取实时数据,确定控制决策,并由运动控制卡来实现该控制决策,产生相应的控制量,驱动电机转动,带动连杆运动,保持摆杆的平衡。
在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图2所示。
图2直线一级倒立摆系统其中:M 小车质量 m 摆杆质量 b 小车摩擦系数l 摆杆转动轴心到杆质心的长度 I 摆杆惯量 F 加在小车上的力 x 小车位置φ摆杆与垂直向上方向的夹角θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下) 下图是系统中小车和摆杆的受力分析图。
其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。
注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向。
图3 (a )小车隔离受力图; (b )摆杆隔离受力图分析小车水平方向所受的合力,可以得到以下方程:MxF bx N =-- (1) 由摆杆水平方向的受力进行分析可以得到下面等式:()22sin d N m x l dtθ=+ (2)即:2cos sin N mxml ml θθθθ=+- 为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:()22cos d P mg m l dtθ-= (3)即:2sin cos P mg ml ml θθθθ-=-- 力矩平衡方程如下:sin cos Pl Nl I θθθ--= (4) 注意:此方程中力矩的方向,由于θπφ=+,cos cos φθ=-,sin sin φθ=-故等式前面有负号。
直线倒立摆的稳定控制算法设计摘要本文首先利用牛顿力学分析的方法和拉格朗日法建立了直线一级、二级、三级倒立摆实物系统的线性状态方程,并在此基础上分析了该系统是不稳定的,同时又是能控的和能观的。
基于此本文设计了直线倒立摆系统的机械本体部分,研究了直线一级、二级、三级倒立摆系统的PID、LQR和状态空间极点配置控制算法,同时利用MATLAB/Simulink对各个算法进行分析,由仿真结果表明:对于像倒立摆这样的非线性模型,通过对其数学模型的建立,设计相应的控制器,并对其实现控制是可行的。
关键词:直线倒立摆;PID;LQR;状态空间极点配置;仿真The stability of linear inverted pendulum control algorithmdesignAbstractIn this paper,we firstly use the Newton mechanics analysis method and the Lagrange method to establish the linear level 1,level 2,level 3 inverted pendulum linear state equation of real system.In the meantime,the system is unstable by analyzing the linear state equation,but it is also controllable and observable.And then we describe on the physical system of the linear inverted pendulum.This paper studied the linear level 1,level 2,level 3 of the inverted pendulum system PID,LQR and state space pole assignment control algorithm,at the same time analyze various algorithms with MATLAB/Simulink.By the simulation results show that:Be similary to inverted pendulum is for the non-linear model,through its mathematical model,the appropriate design of controller,and in its implementation control is feasiblly.Key words:linear inverted pendulum;PID;LQR;s tate space pole configuration;simulation目录1 绪论 (1)1.1前言 (1)1.2倒立摆系统研究背景及意义 (1)1.3国内外倒立摆控制研究发展及现状 (2)1.4本文主要工作 (4)2 倒立摆机械系统设计及实现 (5)2.1 倒立摆简介 (5)2.2 倒立摆工作特性和工作原理 (5)2.2.1工作特性 (5)2.2.2系统工作原理 (5)2.3系统机械结构设计 (6)2.3.1底座设计 (6)2.3.2小车部分设计 (6)2.3.3 传动部分设计 (7)2.3.4 步进电机选择 (7)3 一级直线倒立摆系统的建模分析与仿真 (10)3.1一级倒立摆模型分析 (10)3.1.1系统可观可控性分析 (13)3.1.2系统阶跃响应分析 (14)3.2一级直线倒立摆控制器设计与仿真 (15)3.2.1PID控制器设计及算法仿真 (15)3.2.2 LQR控制器设计及算法仿真 (18)3.2.3状态空间极点配置控制设计及仿真 (20)3.2.4小结 (22)4 二级直线倒立摆系统的建模分析与仿真 (24)4.1二级倒立摆模型的分析 (24)4.1.1二级倒立摆稳定性分析 (29)4.1.2能控性能观性分析 (29)4.2二级直线倒立摆控制器设计与仿真 (30)4.2.1LQR控制器设计及算法仿真 (30)4.2.2状态空间极点配置控制设计及仿真 (31)4.2.3小结 (32)5 三级直线倒立摆系统建模分析与仿真 (34)5.1二级倒立摆模型分析 (34)5.1.1三级倒立摆稳定性分析 (39)5.1.2能控性能观性分析 (39)5.2三级直线倒立摆控制器设计与仿真 (40)5.2.1LQR控制器设计及算法仿真 (40)5.2.2状态空间极点配置控制设计及仿真 (41)5.2.3小结 (43)6 总结与展望 (44)参考文献 (45)致谢 (46)毕业设计(论文)知识产权声明.................................... 错误!未定义书签。
倒立摆小车的稳定控制设计
作者:魏铂淞张启瑞
来源:《科教导刊·电子版》2017年第02期
摘要倒立摆小车,作为PID控制最典型的运用模型,因由其模型结构清晰,控制方法成熟,在现今生活中存在较大的应用潜力。
首先通过对倒立摆小车的介绍,确定状态变量。
然后通过其运动中包含的牛顿第二定律作为建模依据,抽象出了描述倒立摆小车运动的微分方程数学模型,通过构建状态变量得到状态空间模型。
通过MATLAB软件建立小车状态空间模型与PID控制器模型,给定输入,在调整PID控制器参数的过程中,验证小车的控制律设计结果。
关键词创新素质倒立摆课程实践
1引言
对于自动化专业或相近专业来说,倒立摆正在成为一种面向自动控制类课程的较为理想的高端教学实验手段和创新能力提升平台。
倒立摆亦逐渐成为自动控制领域中较为常见的控制律检测验证设备而存在。
于是搞清楚倒立摆的控制原理,系统地总结倒立摆的建模过程将更加方便于广大教育工作者的教育及科研实践。
基于这样的考虑,本文以倒立摆小车为实例,将详细呈现关于对这样一个倒立摆控制问题的建模过程、模型抽象、仿真构建及成果展示。
力求达成一个完整系统的倒立摆控制范本。
2倒立摆小车的物理实体
倒立摆小车通俗的说,就是让一个处于可自由转动状态的杆在小车上保持向上的直立状态。
在自由状态下,这个杆在干扰力的作用下会左右晃动,无法保持向上直立。
为此,就必须施加控制作用,通过自动控制技术使其保持直立,这就是倒立摆的控制。
通过倒立摆控制,可以检验控制算法对于非线性、静态不稳定等问题的处理能力。
而国防和社会生活领域的许多控制问题,也都可以借鉴倒立摆的控制思想和方法,如火箭竖立发射时的稳定控制、行走机器人的稳定控制、运动平台上随动天线的指向控制等。
3 倒立摆小车状态空间的抽象
因倒立摆小车的控制目标是对小车控制而使细杆得以稳定,所以必要以杆为研究对象分析。
在完成对小车物理实体的分析与变量设定后,根据受力分析与运动学定量关系的推导可以得出小车系统基于牛顿第二定律的运动微分方程组,其意义是用前文抽象出的运动变量描述任意时刻的运动状态。
至此已经完成了从小车的实体模型中抽象数学模型的过程。
5结语
倒立摆小车的稳定控制器设计问题,都是以分析实体模型、通过物理定律建立数学模型、抽象传递函数并搭建仿真模型、设定控制器参数并用一定的方法调参。
本文通过对倒立摆小车的控制设计实例为读者总结了一套完整的倒立摆控制设计研究方法。
参考文献
[1] 孟秋艳.论大学生创新素质的培养与提高[J].教育探索,2006(10):19-20.
[2] 师进生,刘清芝,王强,等.高等学校创新教育的探索与实践[J].科教文汇旬刊, 2015(5):25-26.
[3] 王艳芳.大学生创新创业素质培养的探索与实践[J].中国校外教育:理论,2011(1):9.
[4] 固高科技.倒立摆与自动控制原理实验(V2.0)[Z].固高科技(深圳)有限公司,2005.
[5] 胡寿松.自动控制原理(第5版)[M].科学出版社,2007.。