基于proteus的51系列单片机交通灯的设计与仿真
- 格式:doc
- 大小:82.00 KB
- 文档页数:13
目录1 绪论 (1)1.1 课题研究目的 (1)1.2 研究现状 (2)1.3 本文的主要工作 (3)2 系统方案设计 (3)2.1 总体方案设计与分析 (3)2.2 主控制器方案 (4)2.3 显示方案 (5)3 系统电路设计 (5)3.1 主控制器电路 (5)3.1.1 单片机电路 (5)3.1.2 晶振电路 (7)3.1.3 复位电路 (7)3.2 显示电路 (8)3.3 按键电路 (8)3.4 交通灯电路 (9)4 系统硬件设计 (9)4.1 主程序软件设计 (9)4.2 子程序软件设计 (11)4.2.1 显示软件设计 (11)4.2.2 按键扫描软件设计 (13)5 系统测试 (13)5.1 系统调试 (13)5.2 故障检查 (16)6硬件组装与调试 (16)6.1 系统组装 (17)6.2 上电后调试 (18)总结 (19)参考文献 (20)致谢 ...................................................................................................................错误!未定义书签。
附录 (21)附录1:成品图 (21)附录2:原理图 (22)1 绪论1.1 课题研究目的19世纪的时候,英国就出现了世界上首个交通信号灯,因为他的能源来自于煤气的交通信号灯,这种方案在后期的设备运行中很容易产生爆炸,所以后来此种交通信号灯设备就没有在出现了。
到了20世纪的时候,美国的克利夫兰市又有了交通灯设备,然而此次的能源设计方案是电力信号灯。
1930年德国有人开发了选取自动化的设计方案去操作的交通灯,这种设计标志着交通自动操作的起步。
20世纪开始,发达国家第一次选取车辆感应方案处理信号,车辆传感器的主要特点为,此设计能够按照交通拥堵的具体情况去操作交通灯运行的时间参数,这样来解决交通十字路口的拥堵问题,使得车辆可以很快的通过路口,此方案被很多地区进行使用。

单片机控制交通灯控制系统设计-基于Proteus仿真单片机控制交通灯控制系统设计目录引言…………………………………………………………… - 3 -第1章概述 ............................................... - 3 -1.1单片机认识 .............................................. - 4 - 1.2 单片机的应用........................................... - 4 - 1.3设计任务 ................................................ - 5 - 第2章系统总体方案及硬件设计.......................... - 5 -2.1交通管理的方案 .......................................... - 5 - 2.2总体硬件设计 ............................................ - 6 - 2.3系统时钟电路 ............................................ - 6 - 2.4系统复位电路 ............................................ - 6 - 2.5数码管显示电路 .......................................... - 7 - 2.6路灯指示电路 ............................................ - 7 - 2.7按键电路设计 ............................... 错误~未定义书签。
第3章软件系统设计 ...................................... - 9 - - 1 -3.1设计思路及关键技术........................................ - 9 - 3.2 软件流程 ................................................. - 9 - 3.3 交通灯的设计程序说明 ..................................... - 9 -3.4 延时函数 ................................................ - 10 - 3.5 延时函数 ................................................ - 10 - 3.6显示函数 ................................................ - 10 - 3.7定时器0中断函数......................................... - 10 - 第4章Proteus软件仿真 ................................. - 12 -4.1 Proteus软件仿真......................................... - 12 - 4.2 南北路灯切换时仿真 ...................................... - 12 - 4.3 紧急情况下的仿真 ........................................ - 13 - 4.4东西紧急情况下的仿真..................................... - 14 - 第5章心得体会 .......................................... - 15 - 参考文献 .................................................... - 15 - 附1 源程序代码............................................. - 17 - 单片机控制交通灯控制系统设计摘要交通灯是我们日常出行时经常看见的交通控制系统,极大地改善了我们的日常出行。
Proteus班级:电信13—2姓名:段学亮邓成智崔俊杰邓石磊陈亮高金玉成绩:电子与信息工程学院信息与通信工程系1.设计要求单片机的P3口的P3.0~P3。
7连接4×4矩阵键盘,P0口控制一只数码管,当4×4矩阵键盘中的某一按键按下时,数码管上显示对应的键号.例如,1号键按下时,数码管显示“1", 14号键按下时,数码管显示“E”等等.2.仿真电路图仿真电路图,如图一图1:4*4键盘控制数码管显示3。
仿真C51程序#include<reg52。
h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;uchar disnum,temp,key;void delay(uchar i){uchar j,k;for(j=0;j<i;j++)for(k=0;k〈200;k++);}uchar code table_du[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0x7f8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xff};void main(){disnum=16;wela=0;while(1){P3=0xf0;temp=P3;temp=temp&0xf0;if(temp!=0xf0){delay(10);if(temp!=0xf0){temp=P3;temp=temp|0x0f;P3=temp;key=P3;switch(key){case 0xee :disnum=0;break;case 0xde :disnum=1;break;case 0xbe : disnum=2;break;case 0x7e :disnum=3;break;case 0xed :disnum=4;break;case 0xdd : disnum=5;break;case 0xbd : disnum=6;break;case 0x7d :disnum=7;break;case 0xeb : disnum=8;break;case 0xdb : disnum=9;break;case 0xbb : disnum=10;break;case 0x7b :disnum=11;break;case 0xe7 : disnum=12;break;case 0xd7 :disnum=13;break;case 0xb7 :disnum=14;break;case 0x77 :disnum=15;break;}}}P0=table_du[disnum];}}3.电路图仿真效果当按下键盘时,所显示的效果如图3—1至图3—4图3—1:当按下K0键时,数码管显示数字‘0’图3—2:当按下K4键时,数码管显示数字‘4'图3—3:当按下K8键时,数码管显示数字‘8’图3—4:当按下KF键时,数码管显示数字‘F' 5.总结电路设计方面,根据书本上还是课堂上老师所讲的知识,很快设计出来此仿真电路。
单片机原理及应用课程设计题目基于单片机的城市交通灯控制系统设计系 (部)班级姓名学号指导教师《单片机原理及应用》课程设计任务书目录1 引言 (1)1.1 课程设计任务 (1)1.2 设计要求: (1)2 设计方案简述 (2)2.1 总体思路 (2)2.2 主要实现功能 (3)2.3 设计方案与意义 (3)3 详细设计 (4)3.1 系统硬件电路设计 (4)3.2 AT89C51芯片简介 (4)3.2.1 主要特性 (5)3.2.2 管脚说明 (5)3.3 74LS273芯片 (7)3.4 单元电路设计 (7)3.4.1 多位数码显示管 (7)3.4.2 时钟电路 (8)3.4.3 复位电路 (9)3.5 系统整体设计电路 (9)3.6 系统软件功能设计 (10)3.6.1 程序设计思路 (10)3.6.2交通灯程序及设计思路 (11)3.6.3紧急情况程序及设计思路 (12)4 Proteus与Keil C51的操作 (14)4.1 Keil C51单片机软件开发系统 (14)4.2 单片机系统PROTEUS设计与仿真过程 (14)4.3 仿真结果 (15)5 总结 (19)6 参考文献 (20)7 附录 (21)1 引言交通灯是现代交通非常重要的一个组成部分,,一套好的交通灯系统往往对提升城市交通运输效率,降低事故发生率有至关重要的影响。
本系统由单片机系统、交通灯演示系统、按键系统、中断系统以及时钟电路、复位电路组成。
本文设计的智能交通灯系统采用Proteus设计与仿真,程序的编译与调试采用Keil C51来实现。
本文所设计的智能交通灯采用了单片机AT89C51,选用了LED灯和多位数码管来模拟显示的交通灯切换状态。
本系统除了实现最基本的交通灯功能以外,还有用来应对紧急情况的功能,这就是中断系统所实现的在有特定需要的情况下实现对交通灯状态的控制。
对于提高城市交通效率有非常重要的作用。
1.1 课程设计任务本课程设计的任务就是设计一个交通灯的控制系统,具体设计任务如下:1.进行系统总体设计。
摘要本智能交通灯系统的设计主要是利用单片机和C语言完成共同来完成。
首先,系统采用红、黄、绿两组共六个LED发光二极管模拟十字路口东西和南北两个方向的交通信号灯,配有7SEG-MPX6-CC(六位八段共阴极数码管)数码构成倒计时牌,其的控制核心为AT89C51芯片。
其次,系统具有处理紧急情况的功能,可以使东西和南北双向红灯,禁止普通车辆通行。
最后,系统利用Proteus软件进行了软、硬件的的仿真。
关键词:AT89C51单片机倒计时牌中断数码管目录毕业设计任务书 (I)中文摘要............................................................................................... .II 1 引言. (1)1.1设计目的及意义 (1)1.2设计的内容 (1)2 设计原理 (2)2.1总体设计方案 (2)2.2硬件设计原理 (2)2.2.1硬件原理图 (2)2.2.2主要模块电路 (3)2.2.2.1控制核心——AT89C51单片机芯片 (3)2.2.2.2 LED数码管显示 (6)2.2.2.3六路交通灯的模拟 (8)2.2.2.4其它电路 (8)2.3 软件设计原理 (9)2.3.1软件流程图 (9)2.3.1.1主流程图 (9)2.3.1.2主要子程序流程图 (10)2.3.2软件源程序 (11)3 基于Proteus的仿真调试及排故 (11)3.1 Proteus的仿真软件的介绍 (11)3.2 主要调试过程 (11)3.2.1硬件测试 (12)3.2.2软件调试 (12)3.2.3连调 (12)3.3调试时出现的问题及解决方法 (12)4 结论 (14)致谢 (15)附录 (16)附录1 硬件连接图 (16)附录2 源程序 (17)附录3 共阴极LED数码管字段码表 (21)参考文献 (22)1 引言1.1 设计目的及意义交通是一个城市经济的命脉,它不但体现了一个城市的发展活力,也直接与老百姓的生活息息相关。
基于单片机的交通灯系统设计仿真交通信号灯系统是城市交通管理中的重要组成部分,其稳定性和可靠性对交通安全和交通效率有着重要的影响。
为了提高交通信号灯系统的灵活性和智能化程度,本文将基于单片机技术对一种交通信号灯系统进行设计和仿真。
一、系统设计1.系统功能需求本交通信号灯系统需要能够智能地控制交通信号灯的状态,根据不同车辆和行人的需求进行合理的信号灯切换。
系统需要包括红灯、绿灯、黄灯三种状态,并能够根据不同条件进行合理的切换,保障交通的顺利进行。
2.系统硬件设计本系统主要由单片机、交通信号灯、传感器和显示器等硬件组成。
单片机作为系统的核心控制器,能够根据传感器的信号进行智能判断,并控制交通信号灯的状态。
交通信号灯模块包括红灯、黄灯和绿灯,能够根据单片机的控制信号进行状态显示。
传感器主要用于检测车辆和行人的情况,传输给单片机进行处理。
显示器用于显示当前的交通信号灯状态,方便行人和车辆进行参考。
3.系统软件设计系统软件主要包括单片机的程序设计和交通信号灯的状态控制算法。
单片机的程序设计需要根据传感器的信号进行智能判断,根据交通情况合理地控制交通信号灯的状态。
交通信号灯的状态控制算法需要考虑到各种交通情况,包括车辆的数量、行人的情况、交通流量等因素,通过合理的算法进行信号灯状态的切换。
二、系统仿真针对以上设计的交通信号灯系统,我们进行了基于单片机的系统仿真。
我们利用Keil C编程软件对单片机的程序进行开发,并通过Proteus进行系统的仿真。
2.系统硬件连接我们将设计好的单片机程序和交通信号灯模块通过Proteus进行硬件连接,模拟真实的系统环境。
我们通过传感器模拟车辆和行人的情况,检测信号传输给单片机进行处理。
3.系统仿真测试在系统硬件连接完成后,我们进行了系统的仿真测试。
我们模拟了不同情况下的交通流量,观察交通信号灯的状态切换情况,并对系统的稳定性和可靠性进行了测试。
通过对系统仿真的观察和结果分析,我们对系统的性能进行了评估并对系统进行了改进和优化。
基于Proteus的智能交通灯设计与仿真实现智能交通灯是一种通过传感器和智能控制系统实现交通信号灯的智能化管理,能够根据交通流量和道路状况进行智能调控,以提高交通效率和减少交通堵塞。
本文将基于Proteus软件进行智能交通灯的设计和仿真实现。
首先,我们需要明确智能交通灯的基本功能和设计要求。
智能交通灯主要需要实现以下功能:1.根据交通流量进行智能控制。
通过传感器检测道路上的交通流量,智能交通灯可以根据实时的交通情况智能地调整信号灯的时间,以提高交通效率。
2.考虑不同道路的优先级。
在交叉路口附近,智能交通灯需要根据不同道路的优先级来调整信号灯的时间,以确保交通的顺畅和安全。
3.考虑行人的过马路需求。
智能交通灯需要合理地安排行人的过马路时间,以保证行人的安全和顺畅。
接下来,我们将使用Proteus软件进行智能交通灯的设计和仿真实现。
Proteus是一款电子电路设计和仿真软件,可以用来模拟和验证电子电路的性能和功能。
首先,我们需要设计智能交通灯的硬件电路。
在Proteus中,我们可以使用元器件库中的LED灯和开关等元件来构建交通灯的电路。
同时,我们还需要添加传感器来检测交通流量和行人的需求。
在设计电路的过程中,我们需要考虑不同道路的优先级和行人的过马路需求。
根据道路的优先级,我们可以设置不同道路对应的信号灯的亮灭时间。
同时,我们还可以设置传感器来检测行人的需求,以在需要的时候提供行人过马路的时间。
完成电路设计后,我们可以使用Proteus中的仿真功能来验证电路的性能和功能。
在仿真过程中,可以模拟不同道路的交通流量和行人的过马路需求,以观察交通灯是否能够根据实时情况进行智能调控。
在仿真过程中,我们可以观察交通灯的状态变化和信号灯的亮灭时间,以评估交通灯的性能和效果。
如果发现问题,我们可以对电路进行调整和优化,以提升交通灯的智能化管理能力。
总结起来,基于Proteus的智能交通灯设计和仿真实现是一种高效且可靠的方法。
模拟交通灯控制系统的设计一、功能要求利用红、绿、黄三种不同颜色的LED显示不同的通行情况,利用2个数码管进行1秒倒计时显示,最大定时时间为90秒;要求LED点亮时间和倒计时时间准确;完成单片机最小系统及其扩展设计,焊接电路板,组成功能完整的样机。
模拟实际交通灯控制系统功能,完成控制软件的编写与调试。
二、方案论证采用标准AT89C51单片机作为控制器;东、西、南、北各方向通行倒计时显示采用2位LED数码管,LED显示采用直接驱动方式;模拟交通信号灯采用直径为ψ5mm的圆形发光二极管;紧急车辆通行采用实时中断完成;通过蜂鸣器实现盲人提示功能。
按以上系统构架设计,单片机端口资源刚好满足要求,该系统设计方便,电路简单。
三、系统硬件电路的设计整套电路系统由控制系统模块、通行灯控制显示模块、时间显示模块、特种车辆通行控制模块和盲人提示电路模块等组成。
1、主控制系统主控制器采用AT89C51单片机的P1.0~P1.5脚用于控制东西及南北方向的通行灯,P1.6脚用于控制盲人提示电路;P0口及P2 口用于4组2位LED计时器的控制;特种车辆通过时使用外部中断0口(P3.2).5、盲人提示电路模块道口控制系统设计中也考虑到了方便盲人过人行道的声音提示电路,采用蜂鸣器作为声括信号灯提示、数码管倒计时显示、盲人提示功能和紧急车辆通行功能等)。
1、初始化程序初始化程序主要包括声明IO口的连接对象、声明7段LED数码管驱动信号数组、声明基本变量、定义无返回函数(延时函数)。
2、主程序主程序主要负责总体程序管理功能,实现信号灯显示与数码管倒计时显示,以及蜂鸣器提示和特种车通行提示。
主程序流程图如下子程序流程图如下状态1状态2状态4 状态5五、调试及性能分析1、硬件部分首先应用Proteus软件对电路原理图进行检查,检查无误后进行焊接,焊接结束后利用万用表检查线路是否为通路。
2、软件部分首先应用keil u4软件对程序进行编译和调试,调试成功后,利用Proteus 软件进行在线仿真,经过对程序多次地修改后,仿真效果达到了预期的要求。
基于51单片机的交通信号灯模拟控制系统实验一、实验目的和要求1.掌握单片机基本资源使用。
2.掌握单片机电路原理图绘制和仿真。
3.掌握单片机C语言软件开发以及联合仿真。
二、实验内容和原理实验内容:1.根据题目绘制单片机电路原理图。
2.绘制程序流程图并编写C语言程序3.在仿真程序中进行联合仿真,最后提交实验报告三、主要仪器设备keilC,proteus。
四、操作方法与实验步骤4.1 题目要求用单片机设计一个十字路口交通灯模拟控制系统,要求东西、南北两个方向都通行20秒,警告3秒,禁止20秒,同时要考虑到东西、南北两个方向出现异常情况,出现异常情况器该方向通行60秒。
4.2 系统设计思路设置东西、南北方向的交通灯状态变量。
设置计时器变量,用来记录当前状态的持续时间。
设置异常情况变量,用来记录异常情况是否出现。
在主循环中使用无限循环来控制交通灯的状态和计时器的更新。
根据计时器的值和交通灯状态,判断当前状态,并控制灯的状态切换。
初始化交通灯状态和计时器,使东西、南北方向都为"通行"状态,计时器初始值设置为20秒。
在循环中,逐秒更新计时器的值,并判断当前状态。
如果计时器的值为0,即当前状态持续时间结束,根据当前状态进行灯的状态切换和计时器的重设。
如果出现异常情况,将相应方向的状态设置为"异常",并将计时器设置为60秒4.2 电路图绘制(包含详细的参数选定文字和图像叙述)4.3 C程序编制(包含详细的文字和程序流程图)#include <reg51.h>void delay500ms (unsigned char k);void main(void)SP=0X60;TMOD=0x01;IE=0x85;TCON=0x05;while(1)//初始化P1=0x21;delay500ms (40);P1=0x41;delay500ms (6);P1=0x12;delay500ms (40);P1=0x14;delay500ms (6);//状态1,东西方向绿灯,南北方向红灯20s //状态2,东西方向黄灯,南北方向红灯3s //状态3,南北方向绿灯,东西方向红灯20s//状态4,南北方向黄灯,东西方向红灯3s//东西方向异常,东西方向绿灯闪,南北方向红灯闪60svoid int 0(void) interrupt0)unsigned char il,i2;i1=Pl;for(i2=0;i2<60;i2++)P1=0x21;delay500ms (1);P1=0x00;delay500ms (1);Pl=il;//南北方向异常,南北方向绿灯闪,东西方向红灯闪60s void int 1(void) interrupt 2 unsigned char jl,j2;j1=P1;for (j2=0;j2<60;j2++)P1=0x12;delay500ms (1);P1=0x00;delay500ms (1);Pl=jl;//延时500ms 函数void delay500ms (unsigned char m) unsigned char k1, k2;TH0=0x3C;TL0=0xB0;TRO=1;for (k1=0;k1<m;k1++)for (k2=0;k2<10;k2++)while(!TFO);TF0=0;TH0=0x3C;TL0=0xB0;4.3 仿真分析(包含文字和图像叙述)状态,东西方向绿灯,南北方向红灯20秒,状态编码“100”(1):)状态2,东西方向黄灯,南北方向红灯3秒,状态编码“00000 (41H);状态了,南北方向绿灯,东西方向红灯20秒,状态编码“00”00 (2H);:状态4,南北方向黄灯,东西方向红灯3秒,状态编码“000”(4H)。

课程名称单片机原理及应用课程设计院部名称信息技术学院专业计算机科学与技术班级09计(嵌入式系统方向)姓名学号**********指导教师刘钰金陵科技学院教务处制摘要本文介绍了一个基于MCS-51及PROTEUS的十字路口交通灯控制系统的设计与仿真,通过对现实路况交通灯的分析研究,理解交通控制系统的实现方法。
十字路口交通灯控制系统通常要实现自动控制和在紧急情况下禁止普通车辆,而让紧急车辆优先通行。
本文还对MCS-51单片机的结构特点和重要引脚功能进行了介绍,同时对智能交通灯控制系统的设计进行了详细的分析。
最后介绍了PROTEUS嵌入式系统仿真与开发平台的使用方法,利用Proteus 软件对交通灯控制系统进行了仿真,仿真结果表明系统工作性能良好。
关键字:单片机,proteus仿真,中断,十字路口交通灯控制系统前言1,十字路口的交通控制系统指挥着人和各种车辆的安全运行,对交叉口实行科学的管理与控制是交通控制工程的重要研究课题,是保障交叉口的交通安全和充分发挥交叉口的通行能力的重要措施,是解决城市交通问题的有效途径。
交通灯信号灯的出现是人类历史上的一次重大改革,使人类的聚居生活,产生了深远的影响。
使交通得以有效管制,对于疏导交通流量,提高道路通行能力,减少交通事故有明显效果。
如何采用合适的控制方法,最大限度利用好耗费巨资修建的城市高速道路,缓解主干道与匝道、城区同周边地区的交通拥堵状况,越来越成为交通运输管理和城市规划部门亟待解决的主要问题。
随着电子技术的发展,利用单片机技术对交通灯进行智能化管理,已成为目前广泛采用的方法。
2,此十字路口交通灯控制系统,分东西道和南北道,设东西道为A道,南北道为B 道。
规定:A道放行时间为2分钟,B道放行1.5分钟;绿灯放行,红灯停止;绿灯转红灯时,黄灯亮2秒钟;若有紧急车辆要求通过时,此系统应能禁止普通车辆,而让紧急车辆通过。
3,应用单片机实现对交通灯的控制,在十字路口用红,黄,绿的指示灯,加上四个以倒计时显示的数码管来控制交通。
基于51单片机的交通灯设计交通信号灯是指示人和交通工具在道路交通中行进方向或行为的一种交通设施。
在设计交通信号灯时,应考虑交通流量、车辆速度、交叉口结构等因素,以确保交通的顺畅和安全。
本文将基于51单片机设计一种交通信号灯系统,并详细介绍其原理和实现方法。
交通信号灯系统的设计目的是通过控制红、黄、绿三种不同颜色的灯,指示车辆和行人在交通路口安全行驶。
在单片机设计中,我们将使用三个LED灯分别代表红、黄、绿三种状态。
通过控制LED的亮灭,来实现交通信号灯的变换。
首先,我们需要选择适当的硬件设备进行交通信号灯的设计。
在51单片机设计中,可以选择STC89C51或者AT89C51等型号的单片机。
此外,还需要准备三个LED灯、电阻、电容、按键等器件。
接下来,我们将进行电路设计。
在设计电路时,首先将三个LED灯连接到单片机的三个IO口上,每个IO口通过一个电阻与正极连接,负极与GND连接。
此外,在单片机的一个IO口上连接一个按键,通过按下按键触发程序的执行。
在编写程序之前,首先需要确立交通信号灯的运行逻辑。
一般而言,交通信号灯的运行逻辑如下:1.全红状态:所有车辆和行人均停止,任何方向都不可行驶。
2.绿灯状态:一些方向的车辆和行人可以行驶,其他方向均不可行驶。
3.黄灯状态:信号灯将要变成红灯或绿灯,此时车辆和行人应注意刹车或等待。
接下来,我们将编写程序并烧录到单片机中。
在程序中,需要使用到定时器和中断来进行交通信号灯的控制。
具体步骤如下:1.在程序中定义三个LED灯所对应的IO口。
2.初始化定时器,并设置定时时间,用于控制信号灯的变化。
3.设置中断,用于按键的检测和处理。
4.在主循环中,不断检测按键状态,当按键按下时,切换信号灯的状态。
5.根据信号灯的状态,控制LED灯的亮灭。
在程序设计中,应充分考虑各种异常情况和执行顺序,以保证交通信号灯的正常运行。
此外,还可以增加一些辅助功能,如倒计时显示等,以提高交通信号灯的可视性和安全性。
51单片机综合实验交通灯设计报告班级:学生姓名:学号:指导教师:一实验题目交通灯控制系统设计二实验目的1、学会用8051单片机开发简单的计算机控制系统;2、学会用汇编语言和C语言开发系统软件;3、学会8051单片机开发环境wave或Keil uVision3软件的使用;4、学会Proteus软件的使用方法,会用Proteus单片机系统进行仿真;5、学会Protel软件的使用方法,会用Protel绘制电气原理图和印制板图;6、熟悉七位数码管显示的使用方法;7、了解交通灯控制系统的基本组成。
三实验要求交通灯处在十字路口上。
它有红﹑黄﹑绿三种颜色的灯组成。
红灯亮时道路上的车辆停止运行;黄灯是一种过渡用的信号灯,当它亮时,表示道路上的红绿色信号灯即将进行转换。
下面拿东西南北四个方向来说明。
当东西方向允许行车(或者左转)的时候,南北方向就禁止行车,即此时东西方向的绿灯亮红灯灭,而南北方向的绿灯灭红灯亮。
反之当南北方向允许行车(或者左转)的时候,东西方向就禁止行车,即此时南北方向的绿灯亮红灯灭,而东西方向的绿灯灭红灯亮。
交通灯配置示意图如图1所示。
同时当有特殊的情况发生时,能手动控制各个方向的信号灯。
设计任务就是将这一电路用单片机来实现具体的控制。
1 十字路口交通灯配置示意图四设计内容与原理为了在后面的分析中便于说明,将南北方向允许直行命名为状态1,南北方向允许左转命名为状态2,南北方向行车到东西方向行车的转换阶段命名为状态3,将东西方向允许直行命名为状态4,东西方向允许左转命名为状态5,东西方向行车到南北方向方向行车的转换阶段命名为状态6。
假定直行绿灯点亮的时间为25s,左转绿灯点亮的时间为20s,黄灯点亮的时间为5s,则对方红灯的点亮时间为50秒。
黄灯每隔500ms亮一次,之后灭500ms (亮灭一次叫作闪烁一次),一共闪烁5次,持续5s。
各个状态之间的变换情况如下:具体显示周期如下:图2交通信号灯点亮时间图设计电路中每个路口的控制信号灯应有四个,即绿灯两个、黄灯、红灯各一个,同时需要七段数码管一个。
基于Proteus的交通灯设计与仿真摘要近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。
在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。
十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。
那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。
交通信号灯控制方式很多。
本系统采用MSC-51系列单片机ATSC51和可编程并行I/O接口芯片80C51为中心器件来设计交通灯控制器,实现了能根据实际车流量通过8051芯片的P1口设置红、绿灯燃亮时间的功能;红绿灯循环点亮,倒计时剩秒时黄灯闪烁警示。
本系统实用性强、操作简单、扩展功能强本设计以单片机为核心,以LED灯作为直行和左右拐弯指示完成了题目要求的所有功能。
目录摘要 (1)目录 (1)1 绪论 (3)1.1交通灯研究的背景和意义 (3)1.2交通灯的形成 (3)1.3 交通灯国内外发展概况 (4)2 系统工作原理及设计方案 (6)2.1 交通灯的工作原理 (6)2.2 单片机的认识 (6)2.2.1单片机认识 (6)2.3 AT89C51 (8)2.4 交通灯控制线路图以及电路原理图 (10)3 硬件系统设计 (11)3.1 硬件系统组成 (11)3.1.1 单片机最小系统 (11)3. 1.2 51系列单片机运行的硬件条件 (16)4 软件设计 (17)4.1功能要求设计思路 (17)4.2 程序流程图 (18)4.3 汇编源程序 (19)1 绪论1.1交通灯研究的背景和意义交通是城市经济活动的命脉,对城市经济发展、人民生活水平的提高起着十分重要的作用。
城市交通问题是困扰城市发展、制约城市经济建设的重要因素。
城市道路增长的有限与车辆增加的无限这一对矛盾是导致城市交通拥挤的根本原因。
城市街道网络上的交通容量的不断增加,表明车辆对道路容量的要求仍然很高,短期内还不可能改变。
基于proteus的单片机控制模拟交通灯的设计交通灯是城市交通管理中不可或缺的一部分,它能够控制交通流动,确保交通安全。
在这个设计中,我们将使用Proteus软件来模拟交通灯的控制。
首先,我们需要选择一个适合的单片机来控制交通灯。
在这个设计中,我们选择了常用的AT89C51单片机。
AT89C51是一款8位微控制器,具有强大的功能和广泛的应用范围。
接下来,我们需要连接单片机和交通灯。
我们将交通灯的红、黄、绿三个灯分别连接到单片机的三个输出引脚上,用于控制灯的亮灭。
此外,我们还需要连接一个按钮到单片机的输入引脚上,用于模拟行人过马路时的信号。
在Proteus软件中,我们可以使用元件库中提供的交通灯和按钮模拟器来完成这个设计。
我们将交通灯的灯泡分别连接到单片机的输出引脚上,将按钮连接到单片机的输入引脚上。
接下来,我们需要编写单片机的控制程序。
在这个设计中,我们需要实现交通灯的循环控制和行人信号的模拟。
我们可以使用C语言来编写程序,并使用Keil C51编译器将程序烧录到单片机中。
在程序中,我们可以使用定时器和中断来实现交通灯的循环控制。
我们可以设置一个定时器来定时切换交通灯的状态,例如每隔10秒切换一次。
当定时器中断发生时,我们可以在中断服务程序中切换交通灯的状态。
此外,我们还需要实现行人信号的模拟。
当按钮按下时,我们可以通过检测输入引脚的状态来触发行人信号。
当行人信号触发时,我们可以通过改变交通灯的状态来实现停车。
在Proteus软件中,我们可以使用仿真功能来验证我们的设计。
我们可以设置仿真参数,例如定时器的定时周期和按钮按下的时机,然后运行仿真,观察交通灯的状态和行人信号的模拟效果。
通过这个设计,我们可以学习到如何使用Proteus软件来模拟交通灯的控制,同时也能够加深对单片机的理解和应用。
交通灯的设计是一个典型的嵌入式系统应用,通过这个设计,我们可以锻炼自己的嵌入式系统开发能力。
毕业设计基于单片机的交通信号的灯控制系统一. 综合实训的主要内容 1.设计任务设计一单片机控制的交通信号灯系统,模拟城市十字路口交通信号灯功能。
2.基本功能要求2.1 交通信号控制直行车道红黄绿灯控制、左行车道绿灯控制、人行横道红绿灯控制。
2.2 通行时间显示数码管倒计时显示通行时间。
2.3 时间参数设置存储按键实现通行时间的设置,并存储到EEPROM (24C02)芯片中。
二. 硬件方案设计与论证 1. 显示模块设计1.1倒计时时间显示设计思想:由于该系统要求完成倒计时显示通行时间的功能,且考虑到实际的交通系统中车辆及行人通行时间不会超过一分钟,基于以上原因,我们考虑完全采用数码管显示,四个路口分别采用一个二位共阴极数码管进行显示。
(其实物图见附录1图5.3)图2.1 数码管原理图原理图分析:为了显示数字或字符,必须对数字或字符进行编码。
七段数码管GND abcde fg dp gf ed c ba(a)(a,b,c,d,e,f,g)加上一个小数点(dp),共计8段,构成一个字节,通过对这八段给予高低平使二极管导通或截止,从而显示不同的数字或字符。
系统中所使用的是2位共阴数码管(实物图见附录),其管脚从左上方起顺时针依次为1,a,b,e,d,2,g,f,dp,c。
1.2 状态灯显示设计思想:由于该系统要求完成状态灯显示的功能,我们把各个路口的红灯和黄灯设成直行和左拐两个通行方式所共有,也就是说,一个路口只需四个状态灯,一个直行通行的绿灯,一个左拐通行的绿灯,一个共有的红灯,一个共有的黄灯,人行横道采用红绿灯控制,综上所述,我们共使用16个LED绿灯,12个LED 红灯,4个LED黄灯来完成状态灯显示功能。
2.控制模块设计2.1 设计思想由于本系统结构简单,实现较容易,不需要大量的外围扩展,所以我们采用STC89C51单片机作为主控制器,STC89C51单片机具有体积小,功耗低,控制能力强,价格低、扩展灵活,使用方便等特点,其最小系统由振荡电路、复位电路构成。
基于51单片机的交通灯设计论文报告交通灯(红绿灯)是城市交通系统中非常重要的一部分,它在控制交通流量以及确保道路安全方面发挥着关键作用。
随着科技的不断发展,交通灯的设计也越来越智能化和高效。
本篇论文将以51单片机为基础,设计一种基于51单片机的交通灯系统,包括电路设计、程序编写以及系统的实现。
首先,我们需要设计电路来实现交通灯系统。
基于51单片机的交通灯系统通常由红灯、黄灯和绿灯组成。
电路的设计要求能够控制灯的亮灭以及灯的颜色变换。
我们可以使用三个LED灯作为交通灯的灯泡,通过控制灯泡的亮灭来实现交通灯的变化。
使用适当的电阻和电容来限制电流和滤波。
接下来,我们需要编写程序来控制交通灯的变换。
通过使用51单片机的GPIO引脚,可以直接控制LED灯的亮灭。
在程序中,我们需要设置灯的亮灭时间以及灯的切换时机。
通过使用定时器和中断来实现定时控制,可以让灯在规定的时间内变换。
在系统的实现中,我们需要将电路和程序进行整合。
将电路连接到单片机上相应的引脚上,并通过编写程序来控制引脚的电平变化。
同时,我们还可以加入人体红外传感器等外设来实现智能控制,例如通过检测车流量来调节交通灯变换的时间。
在设计交通灯系统时,还需要考虑到系统的可靠性和稳定性。
我们可以通过电路设计上的合理选择和优化来降低系统的故障率,并确保系统能够长时间稳定运行。
通过基于51单片机的交通灯系统设计与实现,可以有效控制交通流量、提高交通效率,并确保道路的安全性。
同时,该系统还具有灵活性和可扩展性,可以根据实际需要进行调整和升级。
综上所述,本论文基于51单片机设计了一种交通灯系统。
通过电路设计、程序编写以及系统的实现,可以实现交通灯的控制和变换。
该系统具有智能化、高效性和稳定性等特点,有助于提高交通管理水平和道路安全。
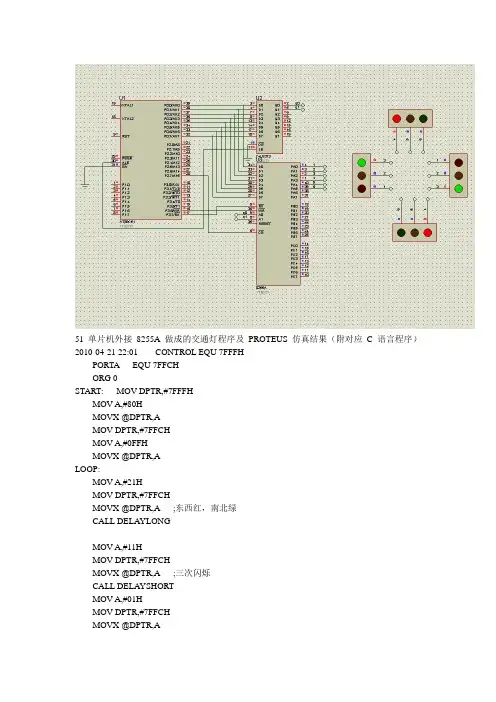
基于proteus的51系列单片机交通灯的设计与仿真一、 proteus软件的认识
Proteus是英国Labcenter electronics公司出版的EDA工具软件,能够进行电路分析与实物仿真软。
它运行于Windows操作系统上,可以仿真、分析(SPICE)各种模拟器件和集成电路,该软件的特点是:实现了单片机仿真和SPICE电路仿真相结合。
具有模拟电路仿真、数字电路仿真、单片机及其外围电路组成的系统的仿真、RS232动态仿真、I2C调试器、SPI调试器、键盘和LCD系统仿真的功能;有各种虚拟仪器,如示波器、逻辑分析仪、信号发生器等。
在编译方面,它也支持IAR、Keil和MPLAB等多种编译器。
Proteus是世界上著名的EDA工具(仿真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计,真正实现了从概念到产品的完整设计,是目前世界上唯一将电路仿真软件、PCB设计软件和虚拟模型仿真软件三合一的设计平台,能够支持主流单片机系统的仿真。
目前支持的单片机类型有:68000系列、8051系列、AVR系列、PIC12系列、PIC16系列、PIC18系列、Z80系列、HC11系列以及各种外围芯片。
可以提供软件调试功能。
在硬件仿真系统中具有全速、单步、设置断点等调试功能,同时可以观察各个变量、寄存器等的当前状态,因此在该软件仿真系统中,也必须具有这些功能;同时支持第三方的软件编译和调试环境,如Keil C51 uVision2等软件,具有强大的原理图绘制功能。
该软件是一款集单片机和SPICE分析于一身的仿真软件,功能极其强大。
二、交通灯的设计电路图的硬件方框图、原理图
1.交通灯的硬件方框图
硬件原理:以89C52为核心,外加控制电路,采用共阳极数码管,实现东西南北四个方向上的交通控制,设计相应的程序使交通灯的亮灭在读秒结束后反映,实现了软件和硬件相结合。
2.交通灯的电路原理图
原理图(1)
原理图(2)
三、交通灯的程序流程图及源程序1.程序流程图:
2.汇编源程序:
REDTIME EQU 32H GREENTIME EQU 33H YELLOWTIME EQU 34H
ORG 0000H
AJMP MAIN
ORG 001BH
AJMP TISER
ORG 0030H
MAIN: MOV REDTIME,#15H MOV GREENTIME,#30H
MOV YELLOWTIME,#03H CLR P1.0
JB P1.0,LP
MOV R0,#15H
MOV R1,#5H
MOV R2,#10H
MOV 20H,#20
MOV TMOD,#10H
MOV TH1,#3CH
MOV TL1,#0B0H
SETB ET1
SETB TR1
SETB EA
LP: INC R0
JB P1.0,LP
AJMP RED
RED: MOV R0,REDTIME SETB P2.4
SETB P2.2
CLR P2.3
CLR P2.6
CLR P2.7
SETB P2.5
CLR P3.0
CLR P3.1
SETB P3.2
RED1: CJNE R0,#00H,RED2 AJMP YELLOW
RED2: ACALL DISPLAY
AJMP RED1
YELLOW: MOV R0,YELLOWTIME
CLR P2.4
SETB P2.3
SETB P2.2
SETB P2.6
CLR P2.7
CLR P2.5
CLR P3.0
CLR P3.2
SETB P3.1
YELLOW1: CJNE R0,#00H,YELLOW2 AJMP GREEN
YELLOW2:ACALL DISPLAY
AJMP YELLOW1
GREEN: MOV R0,GREENTIME
CLR P2.2
SETB P2.4
SETB P2.3
SETB P2.7
CLR P2.5
CLR P2.6
CLR P3.2
CLR P3.1
SETB P3.0
GREEN1: CJNE R0,#00H,GREEN2 AJMP YELLOW0
GREEN2: ACALL DISPLAY
AJMP GREEN1
YELLOW0: MOV R0,YELLOWTIME
CLR P2.4
SETB P2.3
SETB P2.2
SETB P2.6
CLR P2.7
CLR P2.5
CLR P3.0
CLR P3.2
SETB P3.1
YELLOW3: CJNE R0,#00H,YELLOW4 AJMP RED
YELLOW4:ACALL DISPLAY
AJMP YELLOW3
TABLE:
DB 0C0H
DB 0F9H
DB 0A4H
DB 0B0H
DB 99H
DB 92H
DB 82H
DB 0F8H
DB 80H
DB 90H DISPLAY:
CLR P2.1
SETB P2.0 MOV DPTR,#TABLE
MOV A,R0
ANL A,#0FH
MOVC A,@A+DPTR
MOV P0,A
ACALL DELAY10MS
CLR P2.0
SETB P2.1
MOV DPTR,#TABLE
MOV A,R0
ANL A,#0F0H
SWAP A
MOVC A,@A+DPTR
MOV P0,A
ACALL DELAY10MS
RET
TISER:
PUSH PSW
PUSH ACC
PUSH SP
MOV TH1,#3CH
MOV TL1,#0B0H
DJNZ 20H,RETURN
MOV 20H,#20
DEC R0
DEC R1
DEC R2
MOV A,R0
ANL A,#0FH
CJNE A,#0FH,RETURN
MOV A,R0
CLR C
SUBB A,#06H
MOV R0,A
ANL A,#0FH
CJNE A,#0FH,RETURN
RETURN: POP SP
POP ACC
POP PSW
RETI
DELAY10MS:
MOV R6,#20
D1: MOV R7,#250
DJNZ R7,$
DJNZ R6,D1
RET
END
四、关于交通灯的设计、仿真的心得体会及展望
关于交通灯设计与仿真,我深刻地了解到Proteus的强大功能,通过学习单片机及Proteus设计仿真软件,设计好所需电路图,在元件库里找元件,连线,通过kielC51编写汇编语言,运行生成“.hex”文件,加载到AT89C52中,最后用电脑形象地显示实验仿真结果,一步步地改善实现更强功能。
通过这次交通灯实训实践,整体来说还是比较满意的, 不过还是遇到了很多问题:
1.当电路连接好后LED灯不亮时,请教老师后才知道是因为使用
的电阻值过大,之后将电阻值改小,LED灯便可正常发光。
2.在调试过程中遇到LED数码管所显示的数字没有按照我们所预想的方式自减时,询问老师后才知道是少了判断语句,后来通过查询课本,和老师同学讨论之后,增加了判断语句,LED数码管就可以按照预想的那样达到我们的控制目的。
3.调用程序后LED数码管闪烁过快至眼睛无法看清楚,经过多次摸索终于发现是AT89C52芯片的频率设置过大,尝试着改小频率,直到得到我们所需要的闪烁速度。
4.这次设计实训最大的遗憾是自己虽然想到了按键控制电路,但没能通过汇编源程序实现按键控制功能。
展望:通过这次交通灯的设计、仿真的实践训练,我对Proteus 软件有了一定的认识的同时把单片机中的理论学以致用,也对电路设计及仿真产生了很大的兴趣,在以后的学习和工作中,我会参与更多实践,不断加深和拓展,把所学理论正确地应用于实训实践中,尽我所能去设计、仿真并实现可实用性电路。