随动定位式医用扶持机器人系统研制
- 格式:pdf
- 大小:294.24 KB
- 文档页数:3


位置随动系统的分析与设计1.系统需求分析-实时追踪目标位置:系统需要能够实时获取目标的位置信息,可以通过各种传感器如GPS、惯性测量单元等进行实现。
-实时控制移动对象:系统需要能够根据目标位置进行实时控制移动对象,例如调整机器人的航向、调整无人驾驶汽车的速度等。
-高精度定位:系统需要能够实现高精度的目标定位,以保证位置随动控制的准确性。
-快速响应:系统需要能够快速响应目标位置的变化,并及时调整移动对象的控制策略,以保持目标与移动对象之间的距离恒定。
-可靠性与鲁棒性:系统需要具备高可靠性和鲁棒性,能够应对传感器误差、环境变化等因素的影响。
2.系统设计-目标追踪模块:该模块用于实时获取目标的位置信息。
可以采用多种传感器,如GPS、激光测距仪等。
目标追踪模块需要具备高精度定位和高响应速度的特点,以确保位置信息的准确性和实时性。
-控制算法模块:该模块根据目标位置信息计算出移动对象的控制策略。
控制算法可以根据实际需求选择不同的模型,例如PID控制、模糊控制、最优控制等。
控制算法需要具备良好的控制性能和鲁棒性,以保证位置随动控制的稳定性和可靠性。
-控制器模块:该模块负责将控制策略转化为实际的控制指令,并对移动对象进行实时控制。
控制器可以采用硬件控制器或软件控制器的方式实现,也可以使用现有的控制器模块或定制开发控制器模块。
-反馈系统:该系统用于实时获取移动对象的状态信息,如位置、速度、加速度等。
反馈系统可以采用传感器进行实现,例如编码器、惯性测量单元等。
反馈系统可以为控制算法提供实时的状态反馈信息,以便对控制指令进行调整和优化。
3.系统实现位置随动系统的实现需要进行系统建模、算法设计和软硬件集成等工作。
在系统建模过程中,可以使用系统分析和系统设计方法,如UML建模、数据流图、状态转换图等,对系统进行建模和分析。
在算法设计过程中,可以根据系统需求和设计目标选择合适的算法,并进行仿真验证和优化调整。
在软硬件集成过程中,可以使用现有的软硬件平台,如嵌入式系统、机器人操作系统等,将设计好的算法和控制器模块集成到实际的系统中,并进行测试和调试。

基于TRIZ理论医药配送机器人的设计
桓源;任工昌;张冉;洪杰
【期刊名称】《机械制造与自动化》
【年(卷),期】2024(53)3
【摘要】为解决现有医药配送机器人空间容量小、智能化程度低、配送过程药品防护不到位等问题,基于医院实际工况提出合理性解决方案。
以TRIZ理论为基础,运用创新工具对配送机器人各部分进行创新设计,完成拖车式医药配送机器人结构设计和控制系统设计,并通过样机验证了方案的可行性。
所设计的医药配送机器人在拖车式结构和立式循环车厢配合下极大地提高了容积,采用机械臂实现药品的取放,大大提高了智能化程度,自适应底盘的设计增加了对药品的防护性。
该机器人运行过程不需要人为介入即可稳定、可靠地完成整个药品配送过程,有效解决了现有药品的配送难题,具有广阔的推广运用价值。
【总页数】5页(P199-203)
【作者】桓源;任工昌;张冉;洪杰
【作者单位】陕西科技大学机电工程学院
【正文语种】中文
【中图分类】TH122;TP242
【相关文献】
1.基于TRIZ理论的挤奶机器人设计
2.基于TRIZ理论苹果采摘机器人的设计与分析
3.基于FAHP/QFD/TRIZ的智能医疗配送机器人创新设计研究
4.基于TRIZ理论的白车身焊接质量快速检测机器人设计
5.基于TRIZ理论的采茧机器人创新设计
因版权原因,仅展示原文概要,查看原文内容请购买。

翻车机摘钩机器人的研发与应用图1 翻车机重车人工摘钩作业场景人工摘钩操作存在以下几方面的安全隐患,易发生安全事故。
(1)操作空间比较狭窄。
(2)作业时间不经常在半夜或者凌晨,人员困乏精力不佳。
操作人员年龄偏大,安全意识弱,体力、精力、眼力跟随着输煤设备无人值守的发展趋势,非常有必要进行利用机器人代替翻车作业过程中人工摘钩操作的探索研究,以实现摘钩机器代人作业,节约人力成本,降低翻车过程安全风险,实现本质安全。
36研究与探索Research and Exploration ·智能制造与趋势中国设备工程 2024.01 (下)机械臂控制技术通常包括以下几个方面。
(1)运动学控制。
运动学控制是机械臂控制的基础,它可以根据机械臂的结构和参数,计算机械臂的位置和姿态。
运动学控制对于控制机械臂在空间中的运动,完成精准的定位和抓取任务至关重要。
(2)动力学控制。
动力学控制是控制机械臂在运动过程中的运动学参数,包括速度、加速度等。
通过动力学模型计算机械臂的运动,可以实现高精度、高速度的工作。
(3)路径规划。
路径规划是机械臂控制的关键技术之一,它可以计算出机械臂在空间中的最优运动轨迹,并对机械臂进行控制。
路径规划可以根据不同的任务需求,选择不同的运动路径,以实现更加高效的机械臂控制。
(4)力控制。
力控制是机械臂控制的另一项重要技术。
通过力传感器等器件,可以实现机械臂对物体的接触力度和压力的精准控制,以实现高精度抓取和放置任务。
摘钩机器人的机械臂控制技术是摘钩机器人的核心技术之一,它通过运动学、动力学、路径规划等技术手段,实现了机械臂的精准定位和控制,从而实现了更加高效、高质量的机器人抓取任务。
2.3 摘钩机器人控制系统摘钩机器人的控制系统是负责实时控制机器人运动,完成各种任务的关键技术之一。
摘钩机器人的控制系统通常包括以下几个部分。
(1)传感器。
传感器可以采集机器人和环境的信息,包括位置、姿态、力度、视觉等。

康复外骨骼机器人的研究现状及发展趋势探讨作者:刘恒白泽杨陈俊宇李博皓魏俏俏来源:《机电信息》2020年第09期摘要:康复外骨骼机器人是一种可穿戴的、模仿人体生理构造的医疗机械装置,穿戴于患者肢体外侧,辅助患者进行日常活动和康复训练。
近年来,人工智能、传感、生物医学等先进技术不断发展,吸引了国内外各科研院所、机构对康复外骨骼系統进行进一步的研究。
现阐述国内外不同控制方式的外骨骼机器人的研究现状,并对康复外骨骼机器人的发展趋势进行分析和总结。
关键词:康复外骨骼机器人;现状;趋势0 引言“外骨骼”(Exoskeleton)这一名词最早来源于一个生物学概念,指的是昆虫等节肢动物的身体结构。
随着人工智能、传感、生物医学等先进技术的不断发展,外骨骼机器人技术于近20年间取得了空前进步,且广泛应用于医疗、军事、工业等领域。
早期对于外骨骼机器人的研究主要是为了提高士兵的行动和负重能力,而随着医疗需求的不断增长,在全球老龄化趋势加重的背景下,康复外骨骼机器人成为世界各国研究的新方向。
这类装置不仅是中风、脊髓损伤引起的运动障碍康复训练的重要技术手段,还能够帮助卒中患者、脑外伤患者解决行走障碍等问题,因而应用潜力巨大。
目前,康复外骨骼机器人种类繁多,厂家主要有以色列的ReWalk公司、美国的Ekso Bionics公司、日本的Cyberdyne公司、Honda公司和新西兰的Rex公司等。
我国对康复外骨骼下肢助力机器人的研究始于21世纪初,目前正处于起步阶段。
各研究机构在参考借鉴国外先进康复外骨骼助力机器人的基础上,加以自身的创新与研发,已有不少康复外骨骼助力机器人样机问世,也有相当不错的表现。
1 国外研究状况日本筑波大学Cybernics研究中心于1995年研制的原型机HAL(Hybrid Assistive Limb)是一款较早的外骨骼动力服。
该外骨骼机器人的设计初衷是帮助年迈者和残疾人进行康复运动[1]。
该康复外骨骼机器人本质上是一种可穿戴式行走用机器人,当使用者试图行走时,大脑会通过神经向肌肉发送电生理信号,HAL通过传感器可以在人体的皮肤表面捕捉到这种电信号,并激活伺服系统,驱动电动马达迅速动作。
28研究与探索Research and Exploration ·智能制造与趋势中国设备工程 2024.02 (上)要保证这些线路不受干扰,所以在实际施工阶段,应当使用金属管直接对这些线路开展穿线工作,确保能够切实发挥出其屏蔽功能,应当选择镀锌钢管结合建筑物实际情况予以跨接,确保全部电气管线相联通。
动力装置、照明设备、电视线路以及通讯设备需要安装在建筑物中心位置,但在安装过程中,需要注意必须将同引下线主筋之间的距离控制在最小,当有雷电天气时,电子设备会由于发生感应效应而受到损害,所以在施工过程中,相关设计工作人员需要统一进行安排,考虑到所有情况,不断优化弱点系统管线,最大程度降低感应范围。
在安装建筑物外部电源线以及通讯线路时,不单要保证布线的安全性以及隐秘性,还需要在入户位置设置避雷器以及防雷器等,以便发生过载情况时能起到保护作用。
在对智能建筑工程项目进行设计时,需要妥善地进行处理,以保证雷电能够直接传到地表,保护电子设备和人身安全。
大多数情况下,建筑物会安装地网电源地,同时防雷以及安全保护地需要能够不受其他干扰独立运行,有足够的安全距离防止发生反击事故危我国虽然煤炭资源蕴藏丰富,但适用于露天开采的煤田极少,比美国、加拿大、俄罗斯的煤田复杂的多,地下井工开采是煤矿开采的主要方式。
复杂地质条件下的快速智能掘进始终是个难题,同时,掘进装备的自动化智能程度已成为制约煤矿提高生产能力的主要因素。
面临这种独特的开采条件,集中力量研制一种全新的智能掘进机器人系统,就显得尤为迫切。
1 设备介绍该智能掘进机器人系统基于惯导+数字式全站仪实现精确定位,包括依次布置于煤矿巷道内的横轴式掘进机器人、临时支护机器人、钻锚机器人、锚网运输机器人、电液控平台、通风除尘系统及运输系统。
横轴式掘进机器人位于临时支护机器人的框架内,位于整个系统的最前方,利用临时支护机器人一推一拉向前移动;钻锚机器人、锚网运输机器人和电液控平台通过铰接与临时支护机器人串联在一起,通过前方牵引前后移动,通过铰浅谈一种煤矿智能掘进系统刘青松,刘欢,李岩(三一重型装备有限公司,辽宁 沈阳 110027)摘要:本文介绍了一种基于惯导+数字式全站仪实现精确定位的煤矿智能掘进机器人系统,该系统包括横轴式掘进机器人、临时支护机器人、钻锚机器人、锚网运输机器人、电液控平台、通风除尘系统及运输系统,解决了复杂地质条件下智能掘进的难题,提高了掘进效率,保障了安全生产。
自主式种植牙机器人的研制及临床应用摘要:根据相关研究报道可知,牙齿缺失对人体具有较为严重的伤害,目前我国存在缺失牙情况的人数已超过四亿,而以现如今的医疗技术来看,利用种植牙的方式进行缺失牙修复是一种较为不错的手段。
本篇文章就围绕自主式种植牙机器人的研究工作展开深入讨论。
关键词:自主式种植牙机器人;研制;应用现如今,我国在口腔种植领域投入了较大的研究力度,且从发展现状来看,也是较为理想的。
据实际数据报道,每年植入种植体的数量不低于百万颗,发展速度十分迅猛。
但是即便是这样的发展速度,平均来算,一万人中也只有十颗。
相比于其他发达国家,我国与之差距依然较为悬殊。
从这一可以看出,我国在口腔种植技术研发领域依然还有不小的进步空间。
但是从另一方面来看,这也说明,我国在相关技术的研究方面也存在较多的问题,大部分从事相关工作的医生属于继续教育,在对其展开专业化培训的过程中,会遇到较多的难题,最终导致培训结果并不理想,这一情况的存在,使得医生无法为患者提供最佳的治疗方案。
再者,由于口腔术的视野比较受限,这给手术操作带来了巨大的挑战,进而会影响手术结果。
由于上述问题的存在,口腔种植领域的发展也会受到制约,为此,我们特选择了自主式种植牙机器人的深入研究。
一、自主式种植牙机器人的研究背景医学机器人最早出现于上世纪八十年代,其主要代表有达芬奇机器人,这种手术机器人在研制成功后就被应用在临床实践工作中,经过长时间的应用可知,其具有诸多优势,如精准、高效以及安全等。
从这可以看出,机器人技术应用于医学领域具有十分明显的优势,因而凭借这些优势,其在医学领域有了较为良好的发展前景,不少医生以及患者都对该技术手段抱有较大的期望。
从医学机器人出现一直发展到现在,其已经历经了数十年的时间,在这段时间内,手术机器人的应用以及研发得到了极大程度的发展,其已经在医疗领域开始真正发挥作用。
在手术机器人研发领域,美国遥遥领先,但是对比我国的发展来看,我们依然还有不小的努力空间,在手术机器人方面的研究起步较晚,但是从发展趋势来看,还是比较理想的,根据有关数据统计,我国利用手术机器人完成的手术数量一跃成为了世界第一。
关于外科手术机器人的法规如下:
1.2015年,印发的《中国制造2025》,提出重点发展包括医用机
器人在内的高性能诊疗设备。
2.2016年,《关于促进医药产业健康发展的指导意见》:提高核心竞
争力,明确提出发展医用机器人等高端医疗器槭,实现进口替代。
3.2017年,《增强制造业核心竞争力三年行动计划(2018-2020
年)》:手术机器人属于重点支持的高端治疗设备。
《高端医疗器械和药品关键技术产业化实施方案(2018-2020年)》:鼓励腹腔镜和神经外科手术机器人等创新设备产业化,推动骨科手术机器人等产品升级换代。
4.2019年,《关于推动先进制造业和现代服务业深度融合发展的实
施意见》:重点发展手术机器人、医学影像、远程诊疗等高端医疗设备。
5.2021年2月初,工信部会同有关部门起草的《医疗装备产业发
展规划(2021-2025年)》(征求意见稿),提出要攻关智能手术机器人,提升治疗过程视觉实时导航、力感应随动等智能控制功能,推进手术机器人在重大疾病治疗中的规范应用。
6.2021年6月初印发的《关于推动公立医院高质量发展的意见》:
提出要推动手术机器人等智能医疗设备和智能辅助诊疗系统的研发与应用。
7.2022年1月29日,卫健委《关于进一步完善预约诊疗制度加强
智慧医院建设的通知》:推广手术机器人、手术导航定位等智能医
疗设备研制与应用,椎动疾病诊断、怡疗、康复和照护等智能辅助系统应用,提高医疗服务效率。
控制工程C ontrol Engineering of China May 2008V ol .15,S 02008年5月第15卷增刊文章编号:167127848(2008)S 020139203 收稿日期:2007211228; 收修定稿日期:2007212228基金项目:北京市科委重大科技计划基金资助项目(H060720050330);北京石油化工学院青年科研基金资助项目(N07219);北京石油化工学院光机电装备技术北京市重点实验室开放课题基金资助项目(K F2006202)作者简介:唐 建(19782),女,山东威海人,实验师,研究生,主要从事医学机器人技术等方面的教学与科研工作。
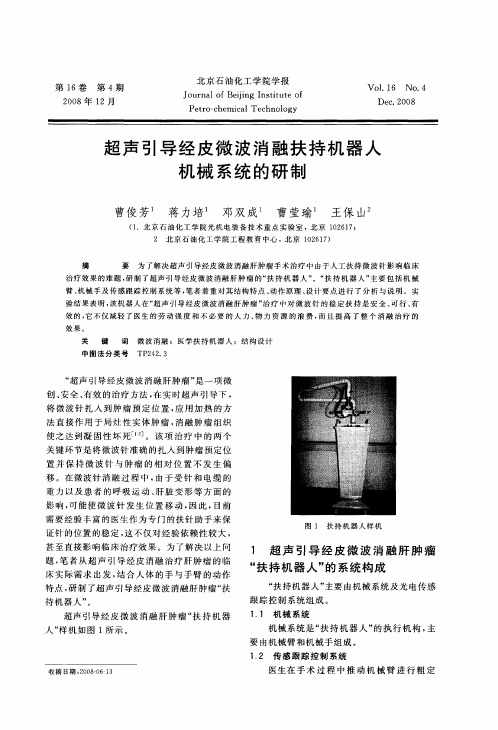
随动定位式医用扶持机器人系统研制唐 建,蒋力培,薛 龙,邓双成(北京石油化工学院光机电装备技术北京市重点实验室,北京102617)摘 要:电极针是超声引导下肝肿瘤微波消融微创手术的关键器械。
针对医生在扶持操作中手部的抖动或用力的不均匀而造成的电极针偏移问题,研制了一种随动定位式扶持电极针的机器人,通过手术医生拉动把手带动机械臂摆动,仿生机械手移到电极针上方并锁紧定位;通过传感器筒体内的遮光片和对应光耦的相对位置变化来感知电极针的偏转及直线运动,控制摆动和伸缩电机转动,从而实现随动扶持。
临床实验表明,该机器人系统大大减少了手术中的人为因素,使微创治疗更为精确、灵巧与安全。
关 键 词:医用机器人;电极针;扶持;随动定位式中图分类号:TP 242 文献标识码:ASystem Development of F ollow 2orientation Medical Supporting R obotT ANG Jian ,JIANG Li 2pei ,XUE Long ,DENG Shuang 2cheng(Opto 2mechatronic Equipment T echnology Beijing Area M ajor Laboratory ,Beijing Institute of Petro 2chem ical T echnology ,Beijing 102617,China )Abstract :The electrode needle is a key apparatus of the ultras onic 2guided microwave ablation minimal invasive surgery on liver tum ors.Aimed at the excursion problem of the electrode needle owing to hand w obble or power asymmetry of doctor in supporting operation ,a s ort of follow 2ori 2entation supporting robot is developed.When the doctor pulling the gripe to make mechanical arm s wing ,the bionic manipulator m oves to the top of the electrode needle and to make it clam ped and fixed.The deflexion and beeline m ovement of the electrode needle can be apperceived through the relative position change between the piece 2shade and corresponding light coupling in the sens or canister ,which controls the s wing and flex electrom otor wheel ,accordingly the follow supporting is realized.The clinical experiments show that the system reduces greatly the arti 2ficial factor of surgery and makes minimally invasive therapy m ore precise ,deft and safe.K ey w ords :medical robot ;electrode needle ;supporting ;follow 2orientation1 引 言随着计算机和微电子技术以及医学科学的迅猛发展,各种用途的医用机器人正在医学领域中得到越来越广泛的应用。
目前,超声引导下肝肿瘤微波消融微创手术中所用的电极针,由于针尖深处病灶之中,整个电极针在手术过程中会随着病人的呼吸运动而运动,所以需有专门的医生来扶电极针,以保证它与病灶的相对位置固定。
这不仅增加了医生的劳动强度,而且一些人为的因素,如手的抖动、力度把握不准等都会影响微波消融的精度。
本文在对医用机器人的研究现状与发展进行简要介绍的基础上,阐述了为解放扶针医生的劳动并保证肝肿瘤微波消融微创手术的治疗效果,而研制的随动定位式医用扶持机器人的机构组成和工作原理,以推动医用机器人技术的多用途研究的进程。
2 国内外医用机器人的研究动向与水平1)国外医用机器人的研究现状与发展 医用机器人系统能够在X 2RAY,CT ,MRI 等医学图像的导航下,对外科手术进行规划和虚拟操作,最后实现多传感器机器人的辅助定位和手术操作,是国外机器人研究领域中最活跃、投资最多的方向之一[1]。
目前,医用机器人的研制主要集中在外科手术、康复和医院服务机器人系统等几个方面。
①外科手术机器人 1992年,美国I BM 的Thomas J 1Waston 研究中心和加利福尼亚大学的研究人员合作开发了ROBODOC 机器人系统,它是在传统工业机器人技术基础上开发而成的,可以完成全髋骨替换、髋骨置换及修复和膝关节置换等手术。
1996年初,C om puter M otion 公司利用研制AES OP 系列机器人积累的在计算机和机器人方面的关键技术,开发出功能强大的视觉系统,推出了ZE US (宙斯)机器人外科手术系统,用于微创伤手术[2]。
1998年,德、法两国医生共同合作,用遥控机器人系统成功地为一例心脏病人进行了瓣膜修复手术。
2000年,美国Intuitive Surgical 公司成功开发出Da Vinci (达・芬奇)外科手术机器人系统(腹腔手术机器人系统),是目前为数不多的商品化的使用技术之一。
系统由三个基本部分组成,即一个控制台、一个装配双光源Π双三晶片摄像机的成像车和一个装有三个机械臂的可移动操作车。
两条机械臂可操作8mm 手术器械。
摄像臂含双摄像机,可形成双眼视觉的三维立体图像。
该系统手术器械上的关节腕有两个关节,具有7个方向的活动自由度(常规器械的5个自由度和关节腕左右、上下方向的2个自由度)。
外科医生坐在控制台前,头靠在视野框上,双眼接受来自不同摄像机的完整图像,共同合成术野的三维立体图。
医生双手控制操作杆,手部动作传达到机械臂的尖端,完成手术操作[3]。
2005年5月15日,在英国盖斯医院,“达芬奇”机器人为佩恩女士和其丈夫成功进行了肾脏移植手术。
这也是英国历史上第一个进行器官移植手术的机器人,尽管它的动作比起职业外科医生要慢些,但机器人医生可以长时间连续工作,它的手从来不会颤抖,可靠性大大提高。
目前,达芬奇和宙斯机器人的手术已超过了6000例,全世界多家医院已安装了这两套机器人系统[4]。
国外还研制出了做脑外科手术、胆囊摘除手术、人工关节置换、整形外科、泌尿科手术的机器人。
以色列吉文成像公司最近研制的一种新型肠胃内窥设备将帮助人们实现长久以来的梦想:派一个“微型机器人”进入人体内拍摄图像,帮助医生判断肠胃疾患所在。
②康复机器人 机器人用于康复领域包括帮助病人进行康复训练、助残、照顾老人等[5]。
日本东京大学的S 1T achi 教授在MIT 日本实验室工作时开发了一个移动式康复机器人ME LDOG,作为“导盲狗”。
来自欧洲Scuola Superiore S 1Anna 技术实验室的一个研究小组在URMAD 系统基础上开发了MOVAI D 系统,它由若干个固定的位于室内主要活动区域(如厨房和卧室)的工作站和一个可以在室内自由避障的移动机器人组成,操作者可以通过工作站的实时图形界面监控和干预机器人的动作,它可以帮助残疾人完成诸如用微波炉(专门研制的)加热食物、打扫厨房和清理床铺等工作。
目前,商业上最成功的护理机器人是K eele 大学的Handy 系统,它最早被设计成一种帮助进食的设备,现在它已经能够帮助病人完成基本的个人卫生工作,比如刷牙、洗脸、简单的修饰。
另一种非常成功的护理机器人是MANUS 轮椅机器人,它装有8个自由度的操纵杆,在肩关节处它能垂直移动250mm ,这样就能将物体从地面捡起来。
③医院服务机器人 医院服务机器人可用来辅助护士完成食物、药品、医疗器械、病志等的传送和投递工作以及照顾不便走动的病人等。
美国运输研究会(T ransition Research C orporation ,TRC ,即现在的HelpMate R obotics )研制的“HelpMate ”机器人,可以24h 在医院里完成运送食物和药品的工作。
与工厂所使用的自动输送车不同的是,这种机器人不是沿着固定的轨道网络行走,而是基于传感器和运动规划算法实现自主行走,适合于部分结构化的环境,系统也能处理传感器噪声、误差和定位错误,发现并避开障碍物(如人等)。
由日本机械工程研究所(ME L )开发的“ME LK ONG ”护理机器人,可轻松而平稳地将病人从床上托起,送往卫生间、浴室或餐厅[5]。
2)国内医用机器人的研究现状 国内医用机器人的研究起步较晚,在技术上比国外还有较大差距。
主要有解放军空军总医院和北京航空航天大学等单位共同研制的脑外科手术机器人,它在辅助无框架脑立体定向手术中具有精确度高、重复性好、安全性强等优点。
由于摆脱了沿用半个世纪的传统定向仪框架,消除了手术视野的死角,方便了操作,提高了定位精度和操作的可视性,因而取得了显著的成果[6]。
哈尔滨工业大学机器人研究所在“863计划”的资助下,联合北京积水潭医院、哈尔滨医科大学附属第二医院等单位共同研制了接骨机器人。
上海交通大学研制的微型智能介入式诊断系统,用于人体消化道的微创检测,解决了插管式检测创伤大、患者异常疼痛、检测部位不全等弊端。