液压控制系统_第三章_液压动力元件 (2)
- 格式:ppt
- 大小:3.02 MB
- 文档页数:86
液压控制系统第一章绪论1. 液压伺服控制系统:是以液压动力元件作驱动装置所组成的反馈控制系统,在这种系统中,输出量能够自动的、快速而准确的复现输入量的变化规律,对输入信号进行功率放大,是一个功放装置。
2. 液压伺服控制系统的组成:分法一:(1)输入元件:给出输入信号加于系统的输入端;(2)比较元件:给出偏差信号;(3)放大转换元件(中枢环节):将偏差信号放大、转换成液压信号。
(4)控制元件:伺服阀;(5)执行元件:液压缸和液压马达;(6)反反馈测量元件:测量系统中的输出并转换为反馈信号;(7)其他元件:伺服油源、校正装置、油箱。
分法二:执行元件、动力元件、介质、辅助元件、控制元件(伺服阀)、比较元件、伺服反馈元件。
3. 液压伺服控制系统的分类:按系统输入信号的变化规律不同分为:定值控制系统、程序控制系统、伺服控制系统。
按被控物理量的名称不同可分为:位置伺服控制系统、速度伺服控制系统、力控制系统、其它物理量的控制系统。
按液压动力元件的控制方式或液压控制元件的形式可分为:节流式控制(阀控式)系统和容积式控制(变量泵控制或变量马达控制)系统两类。
按信号传递介质的形式或信号的能量形式可分为:机械液压伺服系统、电气液压伺服系统、气动液压伺服系统。
4. 泵控与阀控系统的优缺点:阀控系统的优点是响应速度快、控制精度高、结构简单;缺点是效率低。
泵控系统的优点是效率高;缺点是响应速度慢,结构复杂,操纵变量机构所需的力较大,需要专门的操纵机构。
5. 液压伺服控制的优点:(1)液压元件的功率—重量比和力矩—惯量比大,可组成结构紧凑、体积小、重量轻、加速性好的伺服系统;(2)液压动力元件快速性好,系统响应快,由于液压动力元件的力矩—惯量比大,所以加速能力强,能快速启动、制动和反向;(3)液压伺服系统抗负载的刚度大,即输出位移受负载变化的影响小,定位准确,控制精度高。
优点:液压伺服系统体积小,重量轻,控制精度高,响应速度快。
第二章 液压放大元件 习题1. 有一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,径向间隙m r c 6105-⨯=,供油压力Pa p s 51070⨯=,采用10号航空液压油在40C ︒工作,流量系数62.0=d C ,求阀的零位系数。
s pa ⋅⨯=-2104.1μ3/870m kg =ρ 解:对于全开口的阀,d W π=由零开口四边滑阀零位系数2. 已知一正开口量m U 31005.0-⨯=的四边滑阀,在供油压力Pa p s 51070⨯=下测得零位泄漏流量min /5L q c =,求阀的三个零位系数。
解:正开口四边滑阀零位系数ρsd q p wc k 20= ssd co p p wuc k ρ=ρsd c p wuc q 2=3. 一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,供油压力Pa p s 510210⨯=,最大开口量m x m 30105.0-⨯=,求最大空载稳态液动力。
解:全开口的阀d W π= 最大空载液动力:4. 有一阀控系统,阀为零开口四边滑阀,供油压力Pa p s 510210⨯=,系统稳定性要求阀的流量增益s m K q /072.220=,试设计计算滑阀的直径d 的最大开口量m x 0。
计算时取流量系数62.0=d C ,油液密度3/870m kg =ρ。
解:零开口四边滑阀的流量增益:故m d 31085.6-⨯=全周开口滑阀不产生流量饱和条件5. 已知一双喷嘴挡板阀,供油压力Pa p s 510210⨯=,零位泄漏流量s m q c /105.736-⨯=,设计计算N D 、0f x 、0D ,并求出零位系数。
计算时取8.00d =C ,64.0df =C ,3/870m kg =ρ。
解:由零位泄漏量ρπs f N df c p X D C q 02⋅⋅⋅= 即160Nf D X =得: mm p C q D s df cN 438.0216=⋅⋅=ρπ 则:若:8.00=d df C C ,1610=Nf D X 则mm D D N 193.044.00== 第三章 液压动力元件 习题1. 有一阀控液压马达系统,已知:液压马达排量为rad m D m /10636-⨯=,马达容积效率为95%,额定流量为s m q n /1066.634-⨯=,额定压力Pa p n 510140⨯=,高低压腔总容积34103m V t -⨯=。

液压与气动技术(第三版)部分习题参考答案第2章 液压传动基础2-7 解: st t t E t 51121==︒2.351.45123040>==︒E E E ︒-︒=46.7ν )()(s mm s mm 2232389.33887.0276.3451.4451.46.7≈=-=-⨯= )(10390010389.33236s P m kg v a ⋅⨯=⨯⨯==--ρμ2-8 解:机械(杠杆)增力75025⋅=⋅'F F )(6)(600025750KN N F F ===' 液压增力 2244d F D Gππ'= )(04.41613342222KN F d D G =⨯='⋅=2-9 解:取等压面M-M21gh p gh p a s a ρρ+=+ )m kg 800( 10175603321=⨯⨯==h h s ρρ2-10 解:(1)取等压面M-M由于不计油液重量,不计大气压力(管内相对压力为1个标准大气压)则U 形管左边A M p p =左 , 右边gh p g M ρ=右即 gh p A ρ=)(760)(76.08.9106.1310101325.036mm m g p h g A g ==⨯⨯⨯==ρ (2)管内压力为1个工程大气压(a MP 0981.0))(1110)(1.118.9900100981.06cm m g p h y a y ==⨯⨯==ρ 2-11 解:(a ))(3.6)(103.61.0410546242MPa P d Fp a =⨯=⨯⨯==ππ (b))(3.642MPa d Fp ==π2-12 解: v d Av q V 24π== )(85.025*********1062526242s m A q v v =⨯⨯=⨯⨯⨯==-ππ w p v g h p v g h p ∆+++=++22222211112121ραρραρ 式中a p p =1, 01=h , 01=v ,2h =H ,代入上式,整理可得2222222v d l v gH p p a ρλραρ⋅++=- el e R vdR <=⨯⨯⨯==--5.10621020102585.063ν=2300, 层流,2=α 0705.075==eR λ 2p p a -285.090010254.00705.0285.029004.08.9900232⨯⨯⨯⨯+⨯⨯+⨯⨯=-=4545(Pa)第3章 液压动力元件3-6 已知:p =10MPa ,n =1450r/min ,V =200mL/r ,95.0=V η,9.0=η 求:?0=P , ?=i P解:(1)求液压泵的输出功率液压泵的实际流量)min (5.27595.01450102003LVn q q v v vt v =⨯⨯⨯===-ηη液压泵的输出功率 )(92.45)(1092.451065.27510103460kW W pq P v =⨯=⨯⨯⨯== (2)求电机的驱动功率)(519.092.450kW P P i ===η3-7 已知:m =3mm ,z =15, b =25mm , n=1450r/min , m in/25L q v = 求:?=V , ?=V η 解:)(48.22102531566.666.6322r mL b zm V =⨯⨯⨯⨯==- )min (59.3214501048.223L Vn q vt =⨯⨯==-7671.059.3225===vt v v q q η (可见齿轮泵容积效率较低)3-8 已知:转子外径d =83mm ,定子内径D =89mm ,叶片宽度b =30mm求:(1)当rmL V 16=时,?=e ; (2)?max =V 解:(1)beD V π2=)(954.0)(0954.010893014.321622mm cm bD V e ==⨯⨯⨯⨯==-π (2))(32mm d D e =-= )(30.501086330223max rmL beD V =⨯⨯⨯⨯==-ππ 3-9 已知:︒=18γ,d =15mm ,D =116mm , z =7, 95.0==m V ηη,n =980r/min ,p =32MPa 求:?max =V , ?=vt q , ?=V q , ?=i P解:z r D d V ⋅=tan 42max π)(60.46718tan 1161542r mL =⨯︒⨯⨯⨯=π )min (67.4598060.46L Vn q vt =⨯== )min .(38.4395.067.45Lq q v vt v =⨯=⋅=η m v v i pq P P ηηη==0)(6.25)(2563595.095.0)106/(1038.433246kW W ==⨯⨯⨯⨯=第4章 液压执行元件4-4 已知:p =3.5MPa , D =0.09m , d =0.04m , v =0.0152m/s求:F =?,?=V q解:)(86.17)(178585.3)(422kN N d D F ==⨯-=π )(40152.022d D vA q v -⨯==π =7.76×10-5m 3/s = 4.6L/min4-6 已知:min /30L q V =, MPa p 4=求:(1)若 v 2 =v 3 = 4m/min ,D =?,d =? (2) F =?解: D =1.414d 324v d q v ⋅=π34v q d v π= )(78)(108.760/614.3)106/(30424mm m d =⨯=⨯⨯⨯=- 查表4-4,取d =80mm)(14.1132mm d D ==查表4-5,取D =110mm)(38)(37994411044221kN N p D F ==⨯⨯==ππ)(18)(178984)80110(4)(422222kN N p d D F ==⨯-=-=ππ )(20)(20096423KN N p d F ===π4-7 已知:单杆缸, D =125mm ,d =90mm , min /40L q v =,a MP p 5.21= ,02=p求:(1)无杆腔进油,v 1,F 1=?(2)有杆腔进油,v 2,F 2=?(3)差动连接,v 3,F 3=?解:(1)无杆腔进油)(66.30)(30665.212544212111kN N p D A p F ==⨯⨯===ππ(2)有杆腔进油5.210)90125(4)(422122212⨯⨯-⨯=⋅-==ππp d D A p F =14768N=14.77(kN)min)/(77.6)/(1128.0)(42221m s m d D q A q v v v ==-==π (3)差动连接)(9.15)(15896259044212313KN N p d A p F ==⨯⨯===ππmin)/(29.6)/(105.01090106/4044624233m s m d q A q v v v ==⨯⨯⨯⨯===-ππ第5章 液压控制元件5-6 解:(a )a MP p 2=, (b)a MP p 11=5-7 解:(a) 取决于调定压力值低的阀;(b )取决于调定压力值高的阀。
液压动力的元件习题(液压传动)第2章液压动力元件一、填空题1.液压泵是靠________的变化来进行工作的,所以又称液压泵为________式泵。
2.液压泵按结构特点一般可分为________、________、________三类泵。
3.外啮合齿轮泵位于轮齿逐渐脱开啮合的一侧是________腔,位于轮齿逐渐进入啮合的一侧是________腔。
4.变量泵是指________可以改变的液压泵,常见的变量泵有________、________、________;其中________和________是通过改变转子和定子的偏心距来实现变量,________是通过改变斜盘倾角来实现变量。
5.叶片泵一般分为________和________两种。
6.柱塞泵一般分为________和________柱塞泵。
7.液压泵的实际流量比理论流量________;而液压马达实际流量比理论流量________ 。
8.外啮合齿轮泵的_______、_______、_______是影响齿轮泵性能和寿命的三大问题。
9.径向柱塞泵改变排量的途径是_______,轴向柱塞泵改变排量的途径是_______。
10.为了保证齿轮泵的连续地可靠供油,要求其齿轮的啮合系数必须________,这必然产生________,为了克服这一现象,在齿轮泵中开了________。
11.液压泵的总效率等于_______和_______的乘积。
12.为了消除齿轮泵的困油现象,通常在两侧盖板上开________ ,使闭死容积由大变小时与________ 腔相通,闭死容积由小变大时与________腔相通。
13.齿轮泵产生泄漏的间隙为________间隙和________间隙,此外还存在________间隙,其中________泄漏占总泄漏量的80~85%。
14.对额定压力为2.5Mpa的齿轮泵进行泵性能测试,当泵输出的油液直接通向油箱,不计管道阻力,泵输出压力为_______ 。
一、简略设计应用电液比例阀控制的速度控制回路。
画出原理图并加以说明。
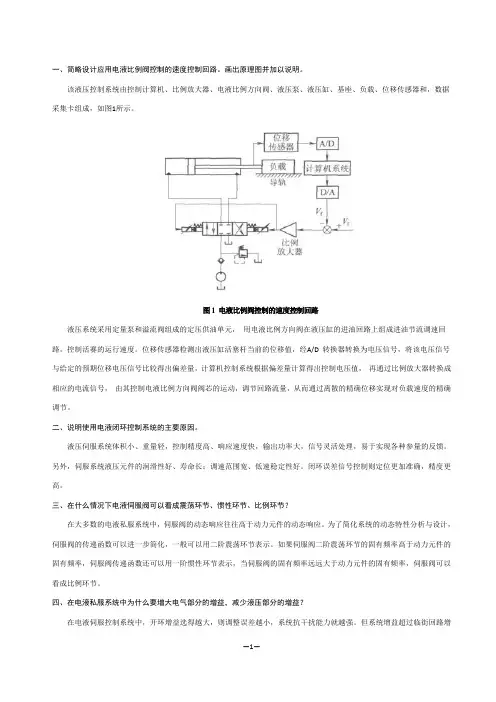
该液压控制系统由控制计算机、比例放大器、电液比例方向阀、液压泵、液压缸、基座、负载、位移传感器和,数据采集卡组成,如图1所示。
图1 电液比例阀控制的速度控制回路液压系统采用定量泵和溢流阀组成的定压供油单元,用电液比例方向阀在液压缸的进油回路上组成进油节流调速回路,控制活赛的运行速度。
位移传感器检测出液压缸活塞杆当前的位移值,经A/D 转换器转换为电压信号,将该电压信号与给定的预期位移电压信号比较得出偏差量,计算机控制系统根据偏差量计算得出控制电压值,再通过比例放大器转换成相应的电流信号,由其控制电液比例方向阀阀芯的运动,调节回路流量,从而通过离散的精确位移实现对负载速度的精确调节。
二、说明使用电液闭环控制系统的主要原因。
液压伺服系统体积小、重量轻,控制精度高、响应速度快,输出功率大,信号灵活处理,易于实现各种参量的反馈。
另外,伺服系统液压元件的润滑性好、寿命长;调速范围宽、低速稳定性好。
闭环误差信号控制则定位更加准确,精度更高。
三、在什么情况下电液伺服阀可以看成震荡环节、惯性环节、比例环节?在大多数的电液私服系统中,伺服阀的动态响应往往高于动力元件的动态响应。
为了简化系统的动态特性分析与设计,伺服阀的传递函数可以进一步简化,一般可以用二阶震荡环节表示。
如果伺服阀二阶震荡环节的固有频率高于动力元件的固有频率,伺服阀传递函数还可以用一阶惯性环节表示,当伺服阀的固有频率远远大于动力元件的固有频率,伺服阀可以看成比例环节。
四、在电液私服系统中为什么要增大电气部分的增益,减少液压部分的增益?在电液伺服控制系统中,开环增益选得越大,则调整误差越小,系统抗干扰能力就越强。
但系统增益超过临街回路增益,系统就会失稳。
在保持系统稳定性的条件下,得到最大增益。
从提高伺服系统位置精度和抗干扰刚度考虑,要求有较高的电气增益K P,因此,液压增益不必太高,只要达到所需要的数值就够了。

第二章思考题1、为什么把液压控制阀称为液压放大元件?答:因为液压控制阀将输入的机械信号(位移)转换为液压信号(压力、流量)输出,并进行功率放大,移动阀芯所需要的信号功率很小,而系统的输出功率却可以很大。
2、什么是理想滑阀?什么是实际滑阀?答: 理想滑阀是指径向间隙为零,工作边锐利的滑阀。
实际滑阀是指有径向间隙,同时阀口工作边也不可避免地存在小圆角的滑阀。
4、什么叫阀的工作点?零位工作点的条件是什么?答:阀的工作点是指压力-流量曲线上的点,即稳态情况下,负载压力为,阀位移时,p L x V 阀的负载流量为的位置。
q L零位工作点的条件是 。
q =p =x =0L L V 5、在计算系统稳定性、响应特性和稳态误差时,应如何选定阀的系数?为什么?答:流量增益,为放大倍数,直接影响系统的开环增益。
q q =x LVK ∂∂流量-压力系数,直接影响阀控执行元件的阻尼比和速度刚度。
c q =-p LLK ∂∂压力增益,表示阀控执行元件组合启动大惯量或大摩擦力负载的能力p p =x LVK ∂∂当各系数增大时对系统的影响如下表所示。
7、径向间隙对零开口滑阀的静态特性有什么影响?为什么要研究实际零开口滑阀的泄漏特性?答:理想零开口滑阀,,而实际零开口滑阀由于径向间隙的影响,存在泄c0=0K p0=K ∞漏流量,,两者相差很大。
2cc0r =32WK πμp0K理想零开口滑阀实际零开口滑阀因有径向间隙和工作边的小圆角,存在泄漏,泄漏特性决定了阀的性能,用泄漏流量曲线可以度量阀芯在中位时的液压功率损失大小,用中位泄漏流量曲线来判断阀的加工配合质量。
9、什么是稳态液动力?什么是瞬态液动力?答:稳态液动力是指,在阀口开度一定的稳定流动情况下,液流对阀芯的反作用力。
瞬态液动力是指,在阀芯运动过程中,阀开口量变化使通过阀口的流量发生变化,引起阀腔内液流速度随时间变化,其动量变化对阀芯产生的反作用力。
习题1、有一零开口全周通油的四边滑阀,其直径,径向间隙,供油-3d=810m ⨯-6c r =510m ⨯压力,采用10号航空液压油在40工作,流量系数,求阀的零5s p =7010a P ⨯C 。
第2章液压动力元件一、填空题1.液压泵是靠________的变化来进行工作的,所以又称液压泵为________式泵。
2.液压泵按结构特点一般可分为________、________、________三类泵。
3.外啮合齿轮泵位于轮齿逐渐脱开啮合的一侧是________腔,位于轮齿逐渐进入啮合的一侧是________腔。
4.变量泵是指________可以改变的液压泵,常见的变量泵有________、________、________;其中________和________是通过改变转子和定子的偏心距来实现变量,________是通过改变斜盘倾角来实现变量。
5.叶片泵一般分为________和________两种。
6.柱塞泵一般分为________和________柱塞泵。
7.液压泵的实际流量比理论流量________;而液压马达实际流量比理论流量________ 。
8.外啮合齿轮泵的_______、_______、_______是影响齿轮泵性能和寿命的三大问题。
9.径向柱塞泵改变排量的途径是_______,轴向柱塞泵改变排量的途径是_______。
10.为了保证齿轮泵的连续地可靠供油,要求其齿轮的啮合系数必须________,这必然产生________,为了克服这一现象,在齿轮泵中开了________。
11.液压泵的总效率等于_______和_______的乘积。
12.为了消除齿轮泵的困油现象,通常在两侧盖板上开________ ,使闭死容积由大变小时与________ 腔相通,闭死容积由小变大时与________腔相通。
13.齿轮泵产生泄漏的间隙为________间隙和________间隙,此外还存在________间隙,其中________泄漏占总泄漏量的80~85%。
14.对额定压力为2.5Mpa的齿轮泵进行泵性能测试,当泵输出的油液直接通向油箱,不计管道阻力,泵输出压力为_______ 。
15. 液压泵将_______转换成_______,为系统提供_______;液压马达将_______转换成_______,输出_______和_______。
第一章绪论一、填空题1 、一部完整的机器一般主要由三部分组成,即 、 、2 、液体传动是主要利用 能的液体传动。
3 、液压传动由四部分组成即 、 、 、 。
4 、液压传动主要利用 的液体传动。
5 、液体传动是以液体为工作介质的流体传动。
包括 和 。
二、计算题:1:如图 1 所示的液压千斤顶,已知活塞 1 、 2 的直径分别为 d= 10mm , D= 35mm ,杠杆比 AB/AC=1/5 ,作用在活塞 2 上的重物 G=19.6kN ,要求重物提升高度 h= 0.2m ,活塞 1 的移动速度 v 1 = 0.5m /s 。
不计管路的压力损失、活塞与缸体之间的摩擦阻力和泄漏。
试求:1 )在杠杆作用 G 需施加的力 F ;2 )力 F 需要作用的时间;3 )活塞 2 的输出功率。
二、课后思考题:1 、液压传动的概念。
2 、液压传动的特征。
3 、液压传动的流体静力学理论基础是什么?4 、帕斯卡原理的内容是什么?5 、液压传动系统的组成。
6 、液压系统的压力取决于什么?第一章绪论答案一、填空题第1空:原动机;第2空:传动机;第3空:工作机;第4空:液体动能; 第5空 :液压泵; 6 :执行元件; 7 :控制元件; 8 :辅助元件; 9 :液体压力能; 10 :液力传动; 11 :液压传动二、计算题:答案:1 )由活塞2 上的重物 G 所产生的液体压力=20×10 6 Pa根据帕斯卡原理,求得在 B 点需施加的力由于 AB/AC=1/5 ,所以在杠杆 C 点需施加的力2 )根据容积变化相等的原则求得力 F 需施加的时间3 )活塞 2 的输出功率第二章液压流体力学基础一、填空题1、油液在外力作用下,液层间作相对运动进的产生内摩擦力的性质,叫做 。
2、作用在液体内部所有质点上的力大小与受作用的液体质量成正比,这种力称为 。
3、作用在所研究的液体外表面上并与液体表面积成正比的力称为 。
4、 液体体积随压力变化而改变。
绪论二、判断题(× )1、液压传动不容易获得很大的力与转矩。
(√ )2、液压传动可在较大范围内实现无级调速。
(√ )3、液压传动系统不宜远距离传动。
(√ )4、液压传动的元件要求制造精度高。
(√ )5、气压传动的适合集中供气与远距离传输与控制。
(√ )6、与液压系统相比,气压传动的工作介质本身没有润滑性,需另外加油雾器进行润滑。
(× )7、液压传动系统中,常用的工作介质就是气油。
(√ )8、液压传动就是依靠密封容积中液体静压力来传递力的, 如万吨水压机。
(√ )9、与机械传动相比, 液压传动其中一个优点就是运动平穏。
第一章液压传动基础二、判断题(√)1、以绝对真空为基准测得的压力称为绝对压力。
(×)2、液体在不等横截面的管中流动,液流速度与液体压力与横截面积的大小成反比。
(×)3、液压千斤顶能用很小的力举起很重的物体,因而能省功。
(√)4、空气侵入液压系统,不仅会造成运动部件的“爬行”,而且会引起冲击现象。
(×)5、当液体通过的横截面积一定时,液体的流动速度越高,需要的流量越小。
(√)6、液体在管道中流动的压力损失表现为沿程压力损失与局部压力损失两种形式。
(√)7、2、液体能承受压力,不能承受拉应力(×)8、油液在流动时有粘性,处于静止状态也可以显示粘性。
(√)9、用来测量液压系统中液体压力的压力计所指示的压力为相对压力。
(×)10、以大气压力为基准测得的高出大气压的那一部分压力称绝对压力。
第二章液压动力元件三、判断题(×)1 、容积式液压泵输油量的大小取决于密封容积的大小。
(√)2、齿轮泵的吸油口制造比压油口大,就是为了减小径向不平衡力。
(×)3.叶片泵的转子能正反方向旋转。
(× )4.单作用泵如果反接就可以成为双作用泵。
(× )5、外啮合齿轮泵中,轮齿不断进入啮合的一侧的油腔就是吸油腔。