三菱机器人程序
- 格式:docx
- 大小:142.07 KB
- 文档页数:31


三菱操作指南三菱操作指南
章节一:简介
1.1 概述
1.2 的分类和应用领域
1.3 的基本构造
1.4 的工作原理
章节二:的安装与调试
2.1 安装准备
2.2 的安装步骤及注意事项
2.3 的调试步骤
2.4 调试过程中常见问题及解决方法章节三:的编程与操作
3.1 编程环境介绍
3.2 编程语言及常用指令
3.3 程序的编写与调试
3.4 操作步骤及注意事项
章节四:的日常维护与保养
4.1 的日常维护工作
4.2 的保养周期与方法
4.3 故障排除与维修
章节五:的安全注意事项
5.1 的安全操作规范
5.2 操作过程中的常见安全问题及处理方法
5.3 的应急停机与紧急情况处理
章节六:附件
附件1:安装图纸
附件2:调试记录表
附件3:操作示例程序
法律名词及注释:
1.:根据《法》所定义,指能够自行或程序控制地完成任务、替代人类劳动的自动化机械装置。
2.编程环境:指操作系统提供的开发环境,用于编写、调试程序的软件工具。
3.操作规范:基于《法》和相关法律法规,制定的操作行为准则,旨在保障操作人员的人身安全和财产安全。
4.应急停机:指在工作过程中,出现紧急情况时,通过紧急停机装置或按下紧急停机按钮,立即使停止工作。
附:本文档涉及附件请查阅相关文件。
—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式第一节三菱机器人离线编程系统的应用1.1 工程区管理1)新建工作区(1)点击菜单栏中的[工作区]-[新建]或者(Ctrl+N)。
工作区显示如下界面。
输入工作区名、标题后,点击[OK]按钮。
(2)工程编辑画面显示后,可设定工程名、通讯设定和离线机器人的设定,然后点击[OK]按钮。
(3)工程创建完毕。
工作区中会显示工程树,走位初始值,制成的[RC1]工程。
2)打开工作区打开已经完成的工作区时,选择菜单栏中的[工作区]-[打开],或者点击工作栏中的(Ctrl+O),选择要打开的工作区后,点击[OK]按钮。
3)关闭工作区与删除工作区关闭当前编辑中的工作区时,请点击菜单栏中的[工作区]-[关闭]。
删除工作区的情况下,如果不关闭作为对象的工作区,就不能删除。
4)工作区名/工作区标题的变更在以打开工作区的基础上,鼠标右击工作区名[工作区的编辑],工作区编辑画面显示后,输入新的工作区名和标题后,点击[OK]。
如下图。
5)工程的编辑6) 工程树(1)离线部分离线部分显示电脑中的信息,即当前设定的机器人的机型和机器人的程序。
(2)在线部分在和控制器连接后,切换成在线状态时,或者模拟启动时显示,显示连接中的机器人型(1)离线部分(2)在线部分(2)备份部分 (4)工具部分号和控制器等相关信息。
(3)备份显示从控制器备份过来的信息。
(4)Tool 功能显示其它功能。
7) 离线/在线/模拟在机器人离线编程软件中,工程的状态可分为离线、在线和模拟三种。
各个状态的含义工程树的工程名左面显示的图标为绿色,工程树中,显示离进行控制器中信息的确认和变更。
在线时,工程树的工程名显示图表进行虚拟可以做以下的切换。
切换成离线模式,切换成在线模式,切换成模拟在线模式。
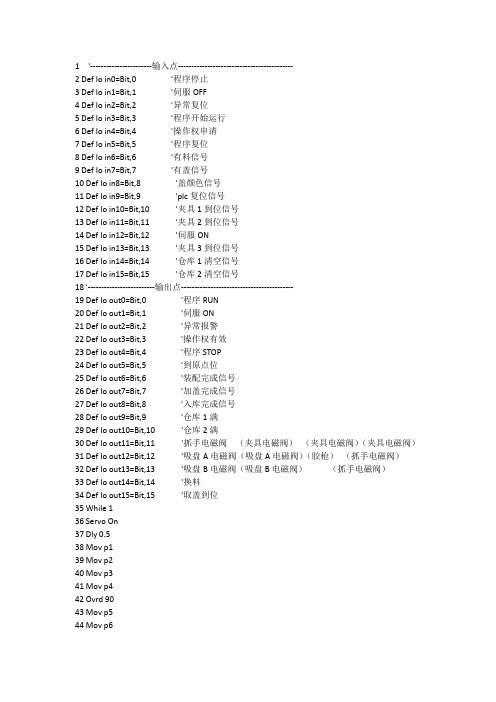
1 '-----------------------输入点-------------------------------------------2 Def Io in0=Bit,0 '程序停止3 Def Io in1=Bit,1 '伺服OFF4 Def Io in2=Bit,2 '异常复位5 Def Io in3=Bit,3 '程序开始运行6 Def Io in4=Bit,4 '操作权申请7 Def Io in5=Bit,5 '程序复位8 Def Io in6=Bit,6 '有料信号9 Def Io in7=Bit,7 '有盖信号10 Def Io in8=Bit,8 '盖颜色信号11 Def Io in9=Bit,9 'plc复位信号12 Def Io in10=Bit,10 '夹具1到位信号13 Def Io in11=Bit,11 '夹具2到位信号14 Def Io in12=Bit,12 '伺服ON15 Def Io in13=Bit,13 '夹具3到位信号16 Def Io in14=Bit,14 '仓库1清空信号17 Def Io in15=Bit,15 '仓库2清空信号18 '-------------------------输出点------------------------------------------19 Def Io out0=Bit,0 '程序RUN20 Def Io out1=Bit,1 '伺服ON21 Def Io out2=Bit,2 '异常报警22 Def Io out3=Bit,3 '操作权有效23 Def Io out4=Bit,4 '程序STOP24 Def Io out5=Bit,5 '到原点位25 Def Io out6=Bit,6 '装配完成信号26 Def Io out7=Bit,7 '加盖完成信号27 Def Io out8=Bit,8 '入库完成信号28 Def Io out9=Bit,9 '仓库1满29 Def Io out10=Bit,10 '仓库2满30 Def Io out11=Bit,11 '抓手电磁阀(夹具电磁阀)(夹具电磁阀)(夹具电磁阀)31 Def Io out12=Bit,12 '吸盘A电磁阀(吸盘A电磁阀)(胶枪)(抓手电磁阀)32 Def Io out13=Bit,13 '吸盘B电磁阀(吸盘B电磁阀)(抓手电磁阀)33 Def Io out14=Bit,14 '换料34 Def Io out15=Bit,15 '取盖到位35 While 136 Servo On37 Dly 0.538 Mov p139 Mov p240 Mov p341 Mov p442 Ovrd 9043 Mov p544 Mov p646 Mov p647 Mov p548 Ovrd 10049 Mov p450 Mov p351 Mov p252 Mov p153 '-----------------------------------------------54 Mov p855 Mov p956 Mov p1057 Mov p1158 Mov p1259 Mov p1360 Mov p1461 Ovrd 9062 Mov p1563 Mov p1664 Mov p1765 Mov p1866 Mov p1767 Mov p1668 Mov p1569 Ovrd 10070 Mov p1471 Mov p1372 Mov p1273 Mov p1174 Mov p1075 Mov p876 Mov p177 '-------------------------------------------------------78 Mov p1979 Mov p2080 Mov p2181 Mov p2282 Mov p2383 Mov p2484 Mov p2585 Mov p2686 Mov p2787 Mov p2888 Mov p2990 Mov p2991 Mov p2892 Mov p2793 Mov p2694 Mov p2595 Mov p2496 Mov p2397 Mov p2298 Mov p2199 Mov p20100 Mov p19101 Mov p1102 WEndp1=(+270.07,+0.00,+504.65,-179.93,+0.00,+87.84)(7,0)p2=(+270.19,+65.14,+600.27,-5.68,-68.42,-83.93)(7,0)p3=(+270.19,+65.14,+600.27,-5.68,-68.42,-83.93)(7,0)p4=(+118.13,-23.33,+717.55,+24.16,+17.08,-80.28)(7,4096) p5=(-4.21,-71.16,+629.38,+115.88,-1.94,+175.67)(3,0)p6=(-3.19,-92.48,+667.49,+43.27,-0.12,-0.54)(3,4096)p7=(+246.92,-11.06,+732.63,+12.18,-0.35,-84.21)(3,15)p8=(+62.14,+0.87,+863.89,-11.92,+0.45,-87.09)(0,0)p9=(+32.08,-0.04,+863.64,-12.87,+0.50,+94.77)(0,4096)p10=(+36.63,-10.14,+863.68,-12.72,+0.81,+137.97)(0,0)p11=(+62.14,+0.87,+863.89,-11.92,+0.45,-87.09)(0,0)p12=(+459.49,+7.49,+636.05,-58.97,+4.84,-85.27)(0,0)p13=(-126.86,-0.69,+617.19,+58.71,-5.74,-86.75)(6,0)p14=(-18.82,+4.29,+631.60,-43.68,-2.40,-86.31)(6,0)p15=(-95.30,-13.41,+643.78,-26.27,-0.62,+112.49)(6,0)p16=(-38.20,+4.46,+644.63,-24.51,-3.00,-85.91)(6,0)p17=(-58.46,-5.34,+511.68,-173.05,-3.63,-90.03)(7,0)p18=(-135.39,-2.49,+595.54,+77.97,-6.01,-87.42)(7,0)p19=(+144.42,-46.70,+733.36,+79.77,-2.13,+72.46)(7,0)p20=(-40.38,+19.68,+793.78,+49.75,-1.65,+65.41)(3,0)p21=(-37.44,+60.48,+735.73,+53.78,-1.74,+33.04)(3,0)p22=(+5.11,+204.56,+682.63,+36.11,-1.27,+0.31)(3,0)p23=(-24.15,-70.36,+608.33,+87.58,-2.16,-18.85)(7,0)p24=(-62.32,-76.88,+556.58,+97.00,-2.15,-39.29)(7,0)p25=(-186.40,+23.45,+711.13,+37.35,-1.31,+84.55)(3,0)p26=(+23.54,-118.37,+795.97,+38.55,-1.35,-167.06)(3,0)p27=(+33.15,-134.85,+842.46,+23.42,+0.40,+23.23)(3,4096) p28=(-6.28,+207.96,+819.15,+39.05,+26.38,+119.37)(5,0) p29=(-46.56,+347.78,+537.87,+2.33,+18.71,+7.01)(7,0)p30=(-5.95,+143.54,+595.24,+25.93,-4.72,+66.41)(7,0)。
三菱机器人基本操作手册一、型号介绍Ⅰ.本体(机械臂):1.RV-E2(M) 6 Axies --- W、S、E、T、P、R2.RV-E3J(M) 5 Axies --- W、S、E、T(×)、P、RⅡ.控制器及示教器型号1.控制器为 CR-E1162.示教器为 P6TB-T二、基本操作首先,把示教器连接到控制器上。
再弹出[T/B EMG.CANCEL]按钮。
最后,把T/B(示教器)打到ENABLE状态。
1.单轴运动(关节运动)A.按[STEP/MOVE]+[JOINT]键,选择关节运动模式.B.按[STEP/MOVE]+(想要移动轴的键),单个轴将会被移动.2. 直线运动A.按[STEP/MOVE]+[XYZ]键,选择直线(XYZ)运动模式.B.按[STEP/MOVE]+(想要移动轴的键),单个轴将会沿着XYZ方向移动.3.改变手动速度按[STEP/MOVE]+[SPD],改变机器人手动速度(LOW<->HIGH).4. 修改点位1.将示教合上方使能开关拨至ENBL.2.选择1. TEACH. 按INP/EXE].3.输入程序号 如:1 按INP/EXE].4.按住[POS/CHAR]不放,再按[ADD],进入点编辑界面.5.MO POSI ( ). 注:在括号内输入要修改的点的序号.如:输入80 按INP/EXE]确认。
6.按住STEP/MOVE不放,再按住INP/EXE]不放,则机器人运行至80点位处. 7.手动调整至所需位置后,按住STEP/MOVE不放,按ADD一次,出现如下界面: MO POSI 80*ADDITION ? *****注:此时若松开[STEP/MOVE]则放弃修改80点,若再按[ADD]则80点被修改至新位置(即机器人当前位置)。
在编辑时删除文字或数字:按住[POS/CHAR]不放,再按[DEL],按一次删一个字符。
5. 程序修改1. ROBOT 控制面板按 [STOP]----------(ROBOT 停机)2. ROBOT 教导盒切换至 [ENBL]3. 在 MENU,选“1”TEACH4. 选择程序号,按“1”5. 按 [COND] + [ADD],进入示教器编程窗口6. 按 [RPL] 2 次,到输入区7. 选到要修改的 LN 后按 [EXE]8. 按 [RPL]9. 修改该行程序后10. 按 [EXE] 更新程序。
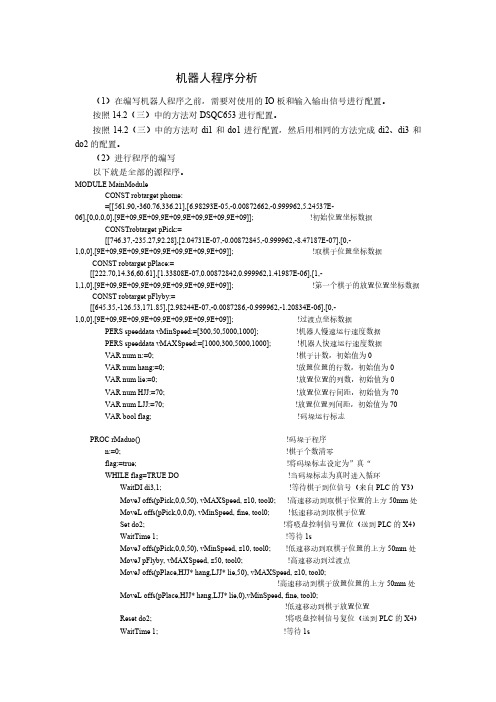
机器人程序分析(1)在编写机器人程序之前,需要对使用的IO板和输入输出信号进行配置。
按照14.2(三)中的方法对DSQC653进行配置。
按照14.2(三)中的方法对di1和do1进行配置,然后用相同的方法完成di2、di3和do2的配置。
(2)进行程序的编写以下就是全部的源程序。
MODULE MainModuleCONST robtarget phome:=[[561.90,-360.76,336.21],[6.98293E-05,-0.00872662,-0.999962,5.24537E-06],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; !初始位置坐标数据CONSTrobtarget pPick:=[[746.37,-235.27,92.28],[2.04731E-07,-0.00872845,-0.999962,-8.47187E-07],[0,-1,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; !取棋子位置坐标数据 CONST robtarget pPlace:=[[222.70,14.36,60.61],[1.33808E-07,0.00872842,0.999962,1.41987E-06],[1,-1,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; !第一个棋子的放置位置坐标数据 CONST robtarget pFlyby:=[[645.35,-126.53,171.85],[2.98244E-07,-0.0087286,-0.999962,-1.20834E-06],[0,-1,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; !过渡点坐标数据PERS speeddata vMinSpeed:=[300,50,5000,1000]; !机器人慢速运行速度数据PERS speeddata vMAXSpeed:=[1000,300,5000,1000]; !机器人快速运行速度数据VAR num n:=0; !棋子计数,初始值为0VAR num hang:=0; !放置位置的行数,初始值为0VAR num lie:=0; !放置位置的列数,初始值为0VAR num HJJ:=70; !放置位置行间距,初始值为70VAR num LJJ:=70; !放置位置列间距,初始值为70VAR bool flag; !码垛运行标志PROC rMaduo() !码垛子程序n:=0; !棋子个数清零flag:=true; !将码垛标志设定为”真“WHILE flag=TRUE DO !当码垛标志为真时进入循环WaitDI di3,1; !等待棋子到位信号(来自PLC的Y3)MoveJ offs(pPick,0,0,50), vMAXSpeed, z10, tool0; !高速移动到取棋子位置的上方50mm处MoveL offs(pPick,0,0,0), vMinSpeed, fine, tool0; !低速移动到取棋子位置Set do2; !将吸盘控制信号置位(送到PLC的X4)WaitTime 1; !等待1sMoveJ offs(pPick,0,0,50), vMinSpeed, z10, tool0; !低速移动到取棋子位置的上方50mm处MoveJ pFlyby, vMAXSpeed, z50, tool0; !高速移动到过渡点MoveJ offs(pPlace,HJJ* hang,LJJ* lie,50), vMAXSpeed, z10, tool0;!高速移动到棋子放置位置的上方50mm处MoveL offs(pPlace,HJJ* hang,LJJ* lie,0),vMinSpeed, fine, tool0;!低速移动到棋子放置位置Reset do2; !将吸盘控制信号复位(送到PLC的X4)WaitTime 1; !等待1sMoveJ offs(pPlace,HJJ* hang,LJJ* lie,50), vMinSpeed, z10, tool0;!低速移动到棋子放置位置的上方50mm处MoveJ pFlyby, vMAXSpeed, fine, tool0; !高速移动到过渡点n:=n+1; !完成一次棋子的码垛后,棋子计数值加一IF n=9 THEN !判断棋子数量是否达到设定值flag:=false; !将码垛标志设定为“假”Set do1; !码垛完成信号置位(送到PLC的X3)ENDIF !结束判断hang:=n DIV 3; !将棋子计数除以3,取商,获得放置行数lie:=n MOD 3; !将棋子计数除以3,取余,获得放置列数ENDWHILE !结束循环ENDPROC !结束子程序PROC teach() !示教位置子程序MoveJ phome, v200, fine, tool0; !示教初始位置MoveJ pPick, v200, fine, tool0; !示教取棋子位置MoveJ pPlace, v200, fine, tool0; !示教第一个放置位置MoveJ pFlyby, v200, fine, tool0; !示教过渡点位置ENDPROCPROC main() !主程序(程序从这里开始运行)Reset do1; !复位码垛完成信号(送到PLC的X3)Reset do2; !复位吸盘控制信号(送到PLC的X4)HJJ:=70; !放置位置行间距赋值为70LJJ:=70; !放置位置列间距赋值为70WaitDI di1,1; !等待起动信号(来自PLC的Y3)MoveJ phome, vMAXSpeed, fine, tool0; !机器人回到初始位置rMaduo; !调用码垛子程序MoveJ phome, vMAXSpeed, fine, tool0; !码垛完成后回到初始位置 ENDPROC !程序结束ENDMODULE(3)程序分析程序的开头是对机器人码垛任务的四个关键位置点进行声明。
目录第一章硬件介绍1、RV-M1基本组成2、机器人本体3、机器人驱动装置4、机器人示教盒5、机器人与外部PLC通信第二章软件介绍1、编程软件2、基本编程指令3、机器人装配程序4、程序调试第一章硬件介绍1、RV-M1基本组成RV-M1基本组成一览图2、机器人本体2.1机器人的安装安装机器人时通过M8x3安装螺栓、M8安装弹簧垫圈和用于安装螺栓的M8平垫圈固定在安装版上,然后再将安装版与移动小车香固定。
机器人底座的安装示意图机器人安装尺寸2.2机器人的移动搬运(1)机器人移动时需如图展示的标准搬运。
(2)在移动机器人前,需把膀臂一向正方向移动,膀臂二向负方向移动,直到都移动到限位。
(3)当提升机器人时,保持机器人在两膀之间和小腹之上。
(4)不能搬运机器人的后盖。
(5)机器人在移动过程中需如图所示状态。
警告:机器人必须和安装版一起移动。
2.3机器人本体的结构组成(1)外部视图外部结构组成示意图RV-M1机器人为五轴机器人,分别为:J1轴1<――>XJ2轴2<――>YJ3 轴3<――>ZJ4轴4<――>PJ5轴5<――>R结构组成:底座支撑、身体、上膀臂(大臂)、前膀臂(小臂)、卷腕器(手腕)、肩上下盖、电机信号线、电动机电源线。
(2)内部视图内部结构组成示意图结构组成:Relay card、各轴的驱动电机、各轴的限位开关、各轴的同步齿型皮带、轴2和3的制动器(3)外观尺寸外观尺寸示意图2.4 机器人的工作(1)回原点机器人每次在上电后,都必须要进行回原点,这样才能让机器人知道具体的机械远点。
在编程的时候,同样需要给程序的开头写入回原点指令nt。
机器人回原点状态位置图(2)工作空间范围工作范围:腰关节(X轴),最大转动范围为300°,最大速度为120°/s。
肩关节(Y轴),最大转动范围为130°,最大速度为72°/s。
肘关节(Z轴),最大转动范围为110°,最大速度为109°/s。
项目七数控机械手控制系统的设计
一、任务描述
设计数控机械手控制系统,机械手的工作过程是:原位→下降→抓取工件→上升→右行→下降→放松→上升→左行→回到原位;(1)下降时变频器的输出频率是10Hz;(2)上升时变频器的输出频率是20Hz;(3)左行和右行变频器的输出频率是30Hz。
二、训练目标
1.能使用PLC和变频器,正确地安装和接线;
2.能按照要求设计PLC控制程序;
3.能对出现的问题进行分析和讨论,通过共同协作完成规定任务。
三、实验过程
1.硬件设备以及参数设置
根据实验要求我们选择三菱Q系列PLC,变频器选择FR-A700,限位开关,按钮,电磁阀和电机等等。
变频器参数设置,把Pr.4设置为30Hz,Pr.5设置为,20Hz,Pr.6设置为10Hz。
2.I/O分配表
3.机械手接线图
SB1SQ4
SQ3SQ2SQ1SB3SB2 4.机械手程序设计
X0M7
X5
X2
M9
M9
X3
M1
M4
M5
M3
M7
M8
M11
M12
M1
M3
M5
M7
M11
M4 M8 M12
M2 M14
M14
M4 M8
M11 M12 M3 M7 M1 M5
四、小结。
三菱程序章节一、引言本文档是关于三菱程序的详细说明和操作指南。
它包含了三菱程序的创建、编辑、和运行等方面的详细步骤和注意事项。
章节二、程序概述本章节介绍三菱程序的基本概念和结构,包括程序的组成部分、程序的作用以及程序的执行流程等内容。
2.1 程序的组成部分2.1.1 程序头2.1.2 程序体2.2 程序的作用2.2.1 程序的功能一2.2.2 程序的功能二2.3 程序的执行流程2.3.1 步骤一2.3.2 步骤二章节三、创建程序本章节介绍如何创建一个新的三菱程序,包括程序的命名规则、编辑环境的说明以及创建程序的具体步骤等。
3.1 程序命名规则3.2 编辑环境说明3.2.1 编辑器3.2.2 菜单栏3.2.3 工具栏3.2.4 配置文件3.3 创建程序的具体步骤3.3.1 步骤一3.3.2 步骤二章节四、编辑程序本章节介绍如何编辑三菱程序中的各个部分,包括添加指令、修改参数以及删除指令等操作。
4.1 添加指令4.2 修改参数4.3 删除指令章节五、和运行程序本章节介绍如何将编辑好的程序到实际的三菱控制器中,并进行程序的运行和调试。
5.1 程序到控制器5.2 程序运行和调试章节六、附件本文档涉及的附件包括示例程序、程序演示视频等。
附件一、示例程序文件夹附件二、程序演示视频文件章节七、法律名词及注释本章节本文档中涉及的法律名词,并提供相应的解释和注释。
7.1 法律名词一、X注释:7.2 法律名词二、X注释:章节八、总结本文档提供了三菱程序的详细说明和操作指南,包括程序的创建、编辑、和运行等方面的内容。
三菱机器人程序 Prepared on 24 November 2020'//////////////定义输入////////////Def Io in0=Bit,0Def Io in1=Bit,1Def Io in3=Bit,3Def Io in4=Bit,4Def Io in5=Bit,5Def Io in6=Bit,6Def Io in7=Bit,7Def Io in8=Bit,8Def Io in9=Bit,9Def Io in10=Bit,10Def Io in11=Bit,11Def Io in12=Bit,12Def Io in13=Bit,13Def Io in14=Bit,14Def Io in15=Bit,15'///////////////定义/输出//////////Def Io out0=Bit,0Def Io out1=Bit,1Def Io out3=Bit,3Def Io out4=Bit,4Def Io out5=Bit,5Def Io out6=Bit,6Def Io out7=Bit,7Def Io out8=Bit,8Def Io out9=Bit,9Def Io out10=Bit,10Def Io out11=Bit,11Def Io out12=Bit,12Def Io out13=Bit,13Def Io out14=Bit,14Def Io out15=Bit,15'//////////////定义变量//////////////Def Jnt jyd '定义安全点Def Plt1,p11,p17,p71,p77,4,4,1'定义托盘点j1=(+,,+,+,+,+jyd=(+,,+,+,+,p0=(+,+,+,+,+,+(0,0)p200=(+,+,+,+,+,+(0,0)p201=(+,+,+,+,+,+(0,0)p202=(+,+ ,+,+,+,+(0,0)p203=(+,+,+,+,+,+(0,0)p204=(+,+,+,+,+,+(0,0)'////////////托盘点//////////////p12=p11p21=p11=+12=+12=+12=+12p15=(Plt1,3) p16=p15p25=p15p26=p15=+12=+12=+12=+12p31=(Plt1,8) p32=p31p41=p31p42=p31=+12=+12=+12=+12p35=(Plt1,6) p36=p35p45=p35p46=p35=+12=+12=+12=+12p51=(Plt1,9) p52=p51p61=p51p62=p51=+12=+12=+12=+12p55=(Plt1,11) p56=p55p65=p55p66=p55=+12=+12=+12=+12p75=(Plt1,14)p85=p75p86=p75=+12=+12=+12=+12p72=p71p81=p71p82=p71=+12=+12=+12=+12'///////////////判断/////////////If M_In(9)=1 And M_In(10)=0Then'判断3个夹具是否在原位If M_In(11)=0 And M_In(13)=0ThenGoSub *fw '程序fwEndIfEndIfIf M_In(9)=1 And M_In(10)=1Then'判断1夹具是否在原位If M_In(11)=0 And M_In(13)=0ThenGoSub *fw1 '夹具1复位EndIfEndIfIf M_In(9)=1 And M_In(10)=0Then'判断夹具2是否在原位If M_In(11)=1 And M_In(13)=0ThenGoSub *fw2 '夹具2复位EndIfEndIfIf M_In(9)=1 And M_In(10)=0Then'判断夹具3是否在原位If M_In(11)=0 And M_In(13)=1ThenGoSub *fw3 '夹具3复位EndIfEndIfIf M_05#>3Thenout14=1M_05#=0EndIfIf M_In(6)=1 And M_05#=0ThenGoSub *ks1 '一次装机EndIfIf M_In(6)=1 And M_05#=1ThenGoSub *ks2 '二次装机EndIfIf M_In(6)=1 And M_05#=2ThenGoSub *ks3 '三次装机EndIfIf M_In(6)=1 And M_05#=3ThenGoSub *ks4 '四次装机EndIfEnd'////////////////复位程序////////////*fw '程序复位Ovrd80j1=J_Curr====Mov j1Mov jydout5=1m_outb(6)=0'将输出信号6-13的8个位关闭M_00#=0M_05#=0M_01#=0Return'/////////////////////////////////////'//////////////////复位1/////////////////////*fw1Ovrd70j1=J_Curr====Mov j1Mov jydout12=0out13=0Mov p1Mov p23ovrd50Spd400Mvs p20-p204Mvs p20Dlyout11=1DlyMvs p20+p203out11=0GoSub *fw4Return'/////////////////////////// '/////////////////////// 复位2//////////// *fw2Ovrd70j1=J_Curr====Mov j1Mov jydout12=0out13=0ovrd50Mov p40+p201Spd400Mvs p40Dlyout11=1DlyMvs p40+p203out11=0GoSub *fw4Return'///////////////////////////'/////////////////复位3//////////////// *fw3Ovrd70j1=J_Curr====Mov j1Mov jydout12=1out13=0Mov p5out12=0ovrd51Mov p2Spd600Mvs p33Mvs p30+p200Mvs p30Dlyout11=1DlyMvs p30+p203out11=0M_05#=M_05#+1If M_In(6)=0Then GoTo *fw4 Return'////////////////////////////// '///////////////////正常复位////////// *fw4Ovrd50j1=J_Curr====Mov j1Mov jydout11=0out12=0out13=0out15=0out7=0out6=0out14=0Return'///////////////////取夹具1/////////// *jj1Wait M_In(10)=0Wait M_In(11)=0Wait M_In(13)=0Ovrd50Mov p20+p201Spd700Mov p20+p203Spd300out11=1Mvs p20Dlyout11=0DlyMvs p20+p200p23=P_CurrMvs p23-p204p23=P_CurrMvs p23+p201p23=P_CurrReturn'///////////////////取夹具2//////////*jj2Spd400Wait M_In(10)=0Wait M_In(11)=0Wait M_In(13)=0Mvs p40+p203out11=1Mvs p40Dlyout11=0DlySpd600Mvs p40+p201Mvs p210+p203Spd400Mvs p210out13=1Mvs p221Mvr p221,p220,p219Mvs p218Mvr p218,p217,p216Mvs p215Mvr p215,p214,p213Mvs p212Mvr p212,p211,p210out13=0out6=1Spd600Mvs p210+p201out6=0Mvs p40+p201Spd400Mvs p40Dlyout11=1DlyMvs p40+p203out6=1Dlyout6=0Return'///////////////////取夹具3////////////////// *jj3Wait M_In(10)=0Wait M_In(11)=0Wait M_In(13)=0Spd400Mvs p30+p203out11=1Spd300Mvs p30Dlyout11=0DlySpd400Mvs p30+p200p33=P_CurrMvs p33-p202p33=P_CurrMvs p33+p201Return'///////////////////去取盖//////////////////*qgOvrd50Mov p5Mov p5Mov p7Wait M_In(7)=1out12=1out13=0Mov p8+p0out12=0Spd200Mvs p8Dlyout13=1Dlyout15=1Dly'/////////////////入仓库///////////////////If M_In(8)=1Then GoTo *ck2 Else GoTo *ck1 '判断颜色Return*ck2 '//////////////////////////////////////////////白色盖GoSub *jgOvrd40Mov p231+p201Spd200If M_In(15)=1 And M_00#>3Thenout10=1Wait M_Out(10)=0M_00#=0EndIfIf M_00#=0Then'第一层If M_In(15)=1ThenMov p6EndIfWait M_In(15)=0Mov p231+p201Spd200Mvs p231EndIfIf M_In(15)=1 And M_00#=1Then'第二层Mvs p231+p0EndIfIf M_In(15)=1 And M_00#=2Then'第三层Mvs p231+p203EndIfIf M_In(15)=1 And M_00#=3Then'第四层Mvs p231+p203+p0EndIfDlyout13=0out12=1Mvs p231+p201out8=1'入库完成GoSub *fw3out8=0M_00#=M_00#+1Return*ck1 '///////////////////////////////////////////////黑色盖GoSub *jgOvrd40Mov p240+p201Spd200If M_In(14)=1 And M_01#>3Thenout9=1Wait M_Out(9)=0M_01#=0EndIfIf M_01#=0Then'第一层If M_In(14)=1ThenMov p6EndIfWait M_In(14)=0Mov p240+p201Spd200Mvs p240EndIfIf M_In(14)=1 And M_01#=1Then'第二层Mvs p240+p0EndIfIf M_In(14)=1 And M_01#=2Then'第三层Mvs p240+p203EndIfIf M_In(14)=1 And M_01#=3Then'第四层Mvs p240+p203+p0EndIfDlyout13=0out12=1Mvs p240+p201out8=1'入库完成GoSub *fw3out8=0M_01#=M_01#+1Return'////////////////////去加盖//////////////////////*jgMvs p8+p203Ovrd50Mov p7Mov p6Mov p9Mov p10+p0Spd200Mvs p10Dlyout7=1Dlyout7=0Mvs p10+p0Ovrd50Mov p9Mov p6Return'//////////////////////////一次装机////////////////////////// *ks1out5=0out6=0out7=0out8=0out14=0out15=0'/////////////////////装1和2键//////////////////////////// Ovrd50Mov p3Ovrd70Mov p11+p0Spd200Mvs p11out12=1out13=1DlyOvrd70Mvs p11+p0Mov p3Mov p104+p0Spd200Mvs p104Dlyout13=0Mvs p104+p0Mvs p103+p0Mvs p103Dlyout12=0Ovrd70Mvs p103+p0Mov p3'/////////////////////// 装3和*键///////////////////// Mov p15+p0Spd200Mvs p15out12=1out13=1DlyOvrd70Mvs p15+p0Mov p3Mov p105+p0Spd200Mvs p105Dlyout12=0Mvs p105+p0Mvs p106+p0Mvs p106DlyOvrd70Mvs p106+p0Mov p3'/////////////////////////// 装4和5键/////////////// Mov p31+p0Spd200Mvs p31out12=1out13=1DlyOvrd70Mvs p31+p0Mov p3Mov p108+p0Spd200Mvs p108Dlyout13=0Mvs p108+p0Mvs p107+p0Mvs p107Dlyout12=0Ovrd70Mvs p107+p0Mov p3'/////////////////////// 装6和0键///////////////////// Mov p35+p0Spd200Mvs p35out12=1out13=1DlyOvrd70Mvs p35+p0Mov p3Mov p109+p0Spd200Mvs p109Dlyout12=0Mvs p109+p0Mvs p110+p0Mvs p110DlyOvrd70Mvs p110+p0Mov p3'/////////////////////////// 装7和8键/////////////// Mov p51+p0Spd200Mvs p51out12=1out13=1DlyOvrd70Mvs p51+p0Mov p3Mov p112+p0Spd200Mvs p112Dlyout13=0Mvs p112+p0Mvs p111+p0Mvs p111Dlyout12=0Ovrd70Mvs p111+p0Mov p3'/////////////////////////////装9键////////////////// Mov p55+p0Spd200Mvs p55out12=1DlyOvrd70Mvs p55+p0Mov p3Mov p113+p0Spd200Mvs p113Dlyout12=0Ovrd70Mvs p113+p0Mov p3'//////////////////#和接听键////////////////Mov p71+p0Mvs p71out12=1out13=1DlyOvrd70Mvs p71+p0Mov p3Mov p114+p0Spd200Mvs p114Dlyout12=0Mvs p114+p0Mvs p100+p0Mvs p100Dlyout13=0Ovrd70Mvs p100+p0Mov p3'//////////////////////装挂机键////////////////// Mov p75+p0Spd200Mvs p75out12=1DlyOvrd70Mvs p75+p0Mov p3Mov p102+p0Spd200Mvs p102Dlyout12=0Ovrd70Mvs p102+p0Mov p3'/////////////////////////装方向键///////////////// Mov p50+p0Spd200Mvs p50out12=1DlyOvrd70Mvs p50+p0Mov p101+p0Spd200Mvs p101Dlyout12=0Ovrd70Mvs p101+p203out6=1'/////////////////////////放回夹具1////////////Ovrd50Mov p23Spd450Mvs p20-p204out6=0Spd400Mvs p20Dlyout11=1DlyMvs p20+p203out6=1Dlyout6=0GoSub *jj2GoSub *jj3GoSub *qgReturn'//////////////////////////二次装机////////////////////////// *ks2out5=0out6=0out7=0out8=0out14=0out15=0GoSub *jj1'/////////////////////装1和2键//////////////////////////// Ovrd50Mov p3Ovrd70Mov p12+p0Spd200Mvs p12out12=1out13=1Ovrd70Mvs p12+p0Mov p3Mov p104+p0Spd200Mvs p104Dlyout13=0Mvs p104+p0Mvs p103+p0Mvs p103Dlyout12=0Ovrd70Mvs p103+p0Mov p3'/////////////////////// 装3和*键///////////////////// Mov p16+p0Spd200Mvs p16out12=1out13=1DlyOvrd70Mvs p16+p0Mov p3Mov p105+p0Spd200Mvs p105Dlyout12=0Mvs p105+p0Mvs p106+p0Mvs p106Dlyout13=0Ovrd70Mvs p106+p0Mov p3'/////////////////////////// 装4和5键/////////////// Mov p32+p0Spd200Mvs p32out12=1out13=1Ovrd70Mvs p32+p0Mov p3Mov p108+p0Spd200Mvs p108Dlyout13=0Mvs p108+p0Mvs p107+p0Mvs p107Dlyout12=0Ovrd70Mvs p107+p0Mov p3'/////////////////////// 装6和0键///////////////////// Mov p36+p0Spd200Mvs p36out12=1out13=1DlyOvrd70Mvs p36+p0Mov p3Mov p109+p0Spd200Mvs p109Dlyout12=0Mvs p109+p0Mvs p110+p0Mvs p110Dlyout13=0Ovrd70Mvs p110+p0Mov p3'/////////////////////////// 装7和8键/////////////// Mov p52+p0Spd200Mvs p52out12=1out13=1Ovrd70Mvs p52+p0Mov p3Mov p112+p0Spd200Mvs p112Dlyout13=0Mvs p112+p0Mvs p111+p0Mvs p111Dlyout12=0Ovrd70Mvs p111+p0Mov p3'/////////////////////////////装9键////////////////// Mov p56+p0Spd200Mvs p56out12=1DlyOvrd70Mvs p56+p0Mov p3Mov p113+p0Spd200Mvs p113Dlyout12=0Ovrd70Mvs p113+p0Mov p3'//////////////////#和接听键////////////////Mov p72+p0Spd200Mvs p72out12=1out13=1DlyOvrd70Mvs p72+p0Mov p3Mov p114+p0Spd200Mvs p114Dlyout12=0Mvs p114+p0Mvs p100+p0Mvs p100Dlyout13=0Ovrd70Mvs p100+p0Mov p3'//////////////////////装挂机键////////////////// Mov p76+p0Spd200Mvs p76out12=1DlyOvrd70Mvs p76+p0Mov p3Mov p102+p0Spd200Mvs p102Dlyout12=0Ovrd70Mvs p102+p0Mov p3'/////////////////////////装方向键///////////////// Mov p60+p0Spd200Mvs p60out12=1DlyOvrd70Mvs p60+p0Mov p3Mov p101+p0Spd200Mvs p101Dlyout12=0Ovrd70Mvs p101+p203out6=1'/////////////////////////放回夹具1////////////Ovrd50Mov p23Spd450Mvs p20-p204out6=0Spd400Mvs p20Dlyout11=1DlyMvs p20+p203out6=1Dlyout6=0GoSub *jj2GoSub *jj3GoSub *qgReturn'//////////////////////////三次装机////////////////////////// *ks3out5=0out6=0out7=0out8=0out14=0out15=0GoSub *jj1'/////////////////////装1和2键//////////////////////////// Ovrd50Mov p3Ovrd70Mov p21+p0Spd200Mvs p21out12=1out13=1DlyOvrd70Mvs p21+p0Mov p3Mov p104+p0Spd200Mvs p104Dlyout13=0Mvs p104+p0Mvs p103Dlyout12=0Ovrd70Mvs p103+p0Mov p3'/////////////////////// 装3和*键///////////////////// Mov p25+p0Spd200Mvs p25out12=1out13=1DlyOvrd70Mvs p25+p0Mov p3Mov p105+p0Spd200Mvs p105Dlyout12=0Mvs p105+p0Mvs p106+p0Mvs p106Dlyout13=0Ovrd70Mvs p106+p0Mov p3'/////////////////////////// 装4和5键/////////////// Mov p41+p0Spd200Mvs p41out12=1out13=1DlyOvrd70Mvs p41+p0Mov p3Mov p108+p0Spd200Mvs p108Dlyout13=0Mvs p108+p0Mvs p107Dlyout12=0Ovrd70Mvs p107+p0Mov p3'/////////////////////// 装6和0键///////////////////// Mov p45+p0Spd200Mvs p45out12=1out13=1DlyOvrd70Mvs p45+p0Mov p3Mov p109+p0Spd200Mvs p109Dlyout12=0Mvs p109+p0Mvs p110+p0Mvs p110Dlyout13=0Ovrd70Mvs p110+p0Mov p3'/////////////////////////// 装7和8键/////////////// Mov p61+p0Spd200Mvs p61out12=1out13=1DlyOvrd70Mvs p61+p0Mov p3Mov p112+p0Spd200Mvs p112Dlyout13=0Mvs p112+p0Mvs p111Dlyout12=0Ovrd70Mvs p111+p0Mov p3'/////////////////////////////装9键////////////////// Mov p65+p0Spd200Mvs p65out12=1DlyOvrd70Mvs p65+p0Mov p3Mov p113+p0Spd200Mvs p113Dlyout12=0Ovrd70Mvs p113+p0Mov p3'//////////////////#和接听键////////////////Mov p81+p0Spd200Mvs p81out12=1out13=1DlyOvrd70Mvs p81+p0Mov p3Mov p114+p0Spd200Mvs p114Dlyout12=0Mvs p114+p0Mvs p100+p0Mvs p100Dlyout13=0Ovrd70Mvs p100+p0Mov p3'//////////////////////装挂机键////////////////// Mov p85+p0Spd200Mvs p85out12=1DlyOvrd70Mvs p85+p0Mov p3Mov p102+p0Spd200Mvs p102Dlyout12=0Ovrd70Mvs p102+p0Mov p3'/////////////////////////装方向键///////////////// Mov p70+p0Spd200Mvs p70out12=1DlyOvrd70Mvs p70+p0Mov p3Mov p101+p0Spd200Mvs p101Dlyout12=0Ovrd70Mvs p101+p203out6=1'/////////////////////////放回夹具1//////////// Ovrd50Mov p23Spd450Mvs p20-p204out6=0Spd400Mvs p20Dlyout11=1DlyMvs p20+p203out6=1Dlyout6=0GoSub *jj2GoSub *jj3GoSub *qgReturn'//////////////////////////四次装机////////////////////////// *ks4out5=0out6=0out7=0out8=0out14=0out15=0GoSub *jj1'/////////////////////装1和2键//////////////////////////// Ovrd50Mov p3Ovrd70Mov p22+p0Spd200Mvs p22out12=1out13=1DlyOvrd70Mvs p22+p0Mov p3Mov p104+p0Spd200Mvs p104Dlyout13=0Mvs p104+p0Mvs p103+p0Mvs p103Dlyout12=0Ovrd70Mvs p103+p0Mov p3'/////////////////////// 装3和*键/////////////////////Mov p26+p0Spd200out12=1out13=1DlyOvrd70Mvs p26+p0Mov p3Mov p105+p0Spd200Mvs p105Dlyout12=0Mvs p105+p0Mvs p106+p0Mvs p106Dlyout13=0Ovrd70Mvs p106+p0Mov p3'/////////////////////////// 装4和5键/////////////// Mov p42+p0Spd200Mvs p42out12=1out13=1DlyOvrd70Mvs p42+p0Mov p3Mov p108+p0Spd200Mvs p108Dlyout13=0Mvs p108+p0Mvs p107+p0Mvs p107Dlyout12=0Ovrd70Mvs p107+p0Mov p3'/////////////////////// 装6和0键///////////////////// Mov p46+p0Spd200out12=1out13=1DlyOvrd70Mvs p46+p0Mov p3Mov p109+p0Spd200Mvs p109Dlyout12=0Mvs p109+p0Mvs p110+p0Mvs p110Dlyout13=0Ovrd70Mvs p110+p0Mov p3'/////////////////////////// 装7和8键/////////////// Mov p62+p0Spd200Mvs p62out12=1out13=1DlyOvrd70Mvs p62+p0Mov p3Mov p112+p0Spd200Mvs p112Dlyout13=0Mvs p112+p0Mvs p111+p0Mvs p111Dlyout12=0Ovrd70Mvs p111+p0Mov p3'/////////////////////////////装9键////////////////// Mov p66+p0Spd200out12=1DlyOvrd70Mvs p66+p0Mov p3Mov p113+p0Spd200Mvs p113Dlyout12=0Ovrd70Mvs p113+p0Mov p3'//////////////////#和接听键//////////////// Mov p82+p0Spd200Mvs p82out12=1out13=1DlyOvrd70Mvs p82+p0Mov p3Mov p114+p0Spd200Mvs p114Dlyout12=0Mvs p114+p0Mvs p100+p0Mvs p100Dlyout13=0Ovrd70Mvs p100+p0Mov p3'//////////////////////装挂机键////////////////// Mov p86+p0Spd200Mvs p86out12=1DlyOvrd70Mvs p86+p0Mov p3Mov p102+p0Spd200Mvs p102Dlyout12=0Ovrd70Mvs p102+p0Mov p3'////////////////////////装方向键///////////////// Mov p80+p0Spd200Mvs p80out12=1DlyOvrd70Mvs p80+p0Mov p3Mov p101+p0Spd200Mvs p101Dlyout12=0Ovrd70Mvs p101+p203out14=1out6=1'/////////////////////////放回夹具1//////////// Ovrd50Mov p23Spd450Mvs p20-p204out14=0out6=0Spd400Mvs p20Dlyout11=1DlyMvs p20+p203out6=1Dlyout6=0GoSub *jj2GoSub *jj3GoSub *qgReturnp0=,,,,,(0,0) p2=,,,,,(7,0) p5=,,,,,(7,0) p6=,,,,,(7,0) p7=,,,,,(7,0) p8=,,,,,(7,0) p9=,,,,,(7,0) p10=,,,,,(7,0) p30=,,,,,(7,0) p33=,,,,,,,(7,0) p40=,,,,,(7,0) p200=,,,,,(0,0) p201=,,,,,(0,0) p202=,,,,,(0,0) p203=,,,,,(0,0) p204=,,,,,(0,0) p231=,,,,,(7,0) p240=,,,,,(7,0) j1=,,,,,jyd=,,,,,。