机器人的组成结构(PPT52页)
- 格式:ppt
- 大小:6.16 MB
- 文档页数:53
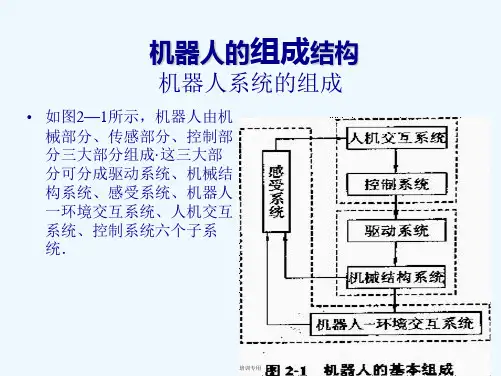
机器人的组成结构机器人在现代社会起着越来越重要的作用,无论是工业生产线上的自动化装配,还是日常生活中的智能家居助理,机器人的组成结构对其功能和性能起着关键作用。
本文将从硬件和软件两个方面介绍机器人的组成结构。
一、硬件组成结构1. 机械结构机器人的机械结构是实现物体操作和运动的基础。
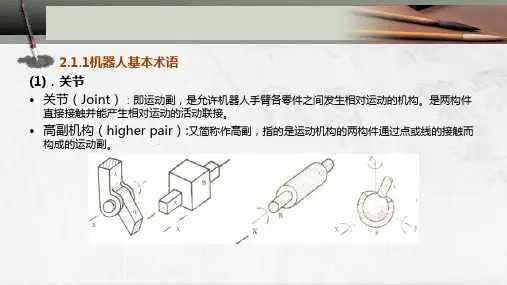
通常包括骨架、关节和执行器等。
骨架提供机器人的整体框架,关节则用来连接不同部位,实现运动,执行器负责产生力和动力。
常见的机械结构包括直线结构、旋转结构、平行结构等,不同机器人根据具体任务需求选择不同的结构。
2. 传感器传感器是机器人获取外部信息的重要手段。
通过感知环境和检测自身状态,机器人可以做出相应的控制和决策。
常见的传感器包括视觉传感器、声音传感器、力觉传感器等。
视觉传感器可以让机器人感知周围环境的图像和颜色信息,声音传感器用于识别声音信号,力觉传感器可以感知外部物体的力和压力。
3. 控制系统机器人的控制系统用于指导机器人的运动和行为。
它包括了执行器的控制、传感器信息的处理和决策的执行等。
其中,执行器控制通过对电机或气缸的控制,实现机械结构的运动。
传感器信息的处理包括对传感器采集的数据进行分析和处理,提取有用的信息。
而决策的执行则是根据传感器信息和预设的规则,确定机器人的下一步动作。
二、软件组成结构1. 机器人操作系统机器人操作系统是控制机器人软件的基石。
它提供了通用的功能和接口,使得开发人员可以方便地开发和部署机器人应用程序。
常见的机器人操作系统包括ROS(Robot Operating System)和MIRA等。
机器人操作系统可以提供传感器数据的输入输出、运动控制、路径规划、视觉处理等功能。
2. 感知与理解机器人的感知与理解模块负责对外部环境进行感知,并进行语义理解。
它通过传感器获取环境数据,针对不同任务进行数据分析和处理。
例如,通过图像识别技术对环境中的物体进行识别和分类,通过语音识别技术理解人类的指令等。
机器人的组成结构
机器人组成结构可以分为两大类,一种是机械结构,一种是电气系统。
机械结构包括机器人的外壳、链轮、电机、机架、连接器和固定元件等。
外壳是机器人外部结构的基础,其能够将各种不同部件进行隔离,链
轮则是实现机械移动的核心元件,通过不同大小的链轮可以实现不同的移
动结构,由电机赋予机器人发动力,机架结构的设计则是机器人稳定及移
动的根本保证,最后,连接器和固定元件的设计保证了机器人系统的灵活
性及可操作性。
电气系统包括传感器、伺服机构、控制器和通信模块。
传感器用于收
集环境信息,例如激光雷达、视觉传感器等。
伺服机构则用于机器人的动
作控制,例如舵机、舵轮机构等。
控制器分为电路控制和计算机控制两种,其中电路控制包括继电器、变频器等,计算机控制通常指PLC或PC等。
通信模块则一般采用数字通信接口,实现外部控制器和机器人之间的通信。
机器人系统的控制一般分为本地控制和远程控制。
本地控制通常指由
机器人自身的传感器控制其动作;远程控制则指通过外部控制器控制机器
人的动作,如移动控制和夹持控制等。
机器人的应用则可根据具体场景进行不同的分类。
2机器人的组成结构机器人的组成结构包含了硬件和软件两个方面。
硬件方面主要包括主控系统、感知系统、执行系统以及电源系统等。
软件方面则包括机器人操作系统、控制算法、感知处理以及行为规划等。
1.主控系统主控系统是机器人的核心部分,负责控制机器人的整体运行。
通常由一块集成电路板制成,该电路板上集成了处理器、内存、输入/输出接口以及其他必要的控制电路。
主控系统负责接收和处理来自感知系统的传感器数据,根据预先编写的算法进行计算和决策,并向执行系统发送指令。
2.感知系统感知系统是机器人获取外界信息的重要组成部分,用于感知和理解周围环境。
感知系统通常包括各种传感器,如摄像头、激光雷达、红外线传感器、触摸传感器等。
这些传感器可以帮助机器人获取地图信息、目标检测、避障以及姿态控制等。
3.执行系统执行系统是机器人的运动和动作执行部分。
通常由电机和执行机构组成,用于驱动机器人的各个关节进行运动。
执行系统可以根据主控系统的指令实现机器人的运动控制,包括移动、转向、抓取、举起等动作。
4.电源系统机器人需要稳定的电源供应以保持正常运作。
电源系统主要包括电池、电源管理模块以及电源供应线路等。
电源系统必须满足机器人各个组件的工作电压和功率需求,同时也需要考虑电池寿命和容量等因素。
5.机器人操作系统机器人操作系统是机器人软件的基础,为机器人提供了各种功能和服务。
机器人操作系统通常提供多任务处理、网络通信、设备驱动、数据存储等功能,以及机器人编程和控制接口。
目前常用的机器人操作系统包括ROS(Robot Operating System)和ROS2等。
6.控制算法控制算法是机器人实现各种功能和任务的关键部分,涉及到机器人运动规划、路径规划、动作控制等。
控制算法通常基于传感器数据进行计算和决策,以达到用户预期的目标。
7.感知处理感知处理是通过对感知系统获取的数据进行处理和分析,从中提取出有用的信息。
感知处理包括图像处理、信号处理、目标识别、地图构建等,使机器人能够对周围环境进行理解和认知。