移栽机自动取苗装置的_设计研究
- 格式:ppt
- 大小:8.67 MB
- 文档页数:23
水稻钵苗移栽机整排多株夹取式取苗机构的研究与设计于省元,王静学,吴显斌(黑龙江省农垦科学院,哈尔滨150038)众所周知,水稻钵苗移栽与传统插秧相比,具有不伤根、缓苗快、产量高、品质好等特点,现介绍一种水稻钵苗移栽机上的整排多株夹取式取苗机构。
1 主要结构水稻钵苗移栽整排多株夹取式取苗机构属于农业机械领域,该设计为一次取苗14株;机构的结构新颖、独特、合理,动作连续化程度和取苗效率高,取苗质量和效果好,保护秧盘不受破坏,作业使用成本低。
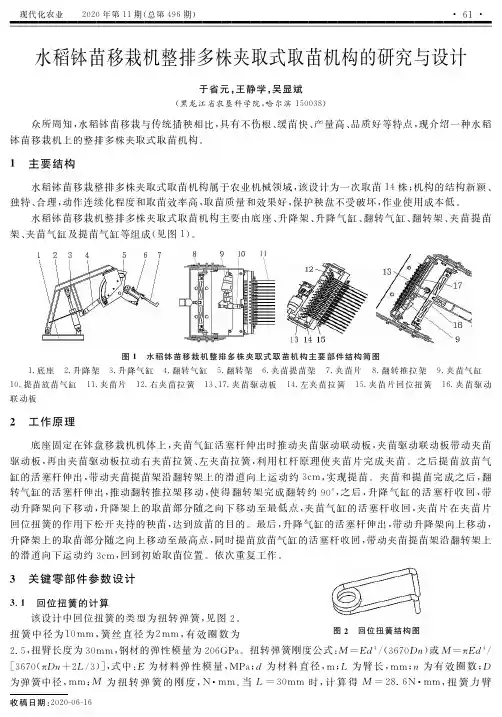
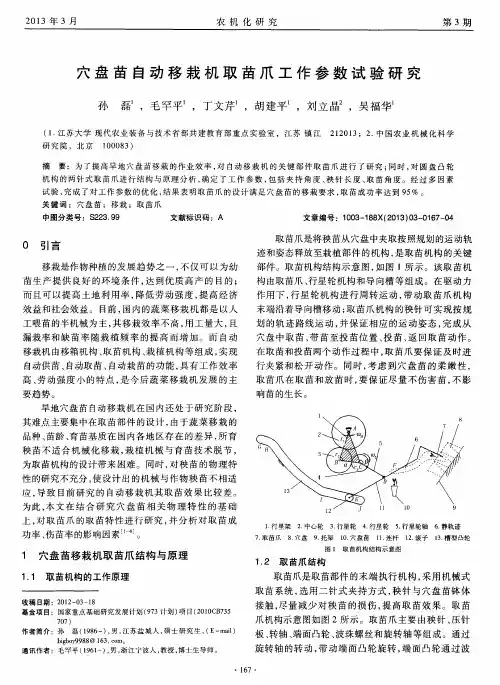
水稻钵苗移栽机整排多株夹取式取苗机构主要由底座、升降架、升降气缸、翻转气缸、翻转架、夹苗提苗架、夹苗气缸及提苗气缸等组成(见图1)。
图1 水稻钵苗移栽机整排多株夹取式取苗机构主要部件结构简图1.底座 2.升降架 3.升降气缸 4.翻转气缸 5.翻转架 6.夹苗提苗架 7.夹苗片 8.翻转推拉架 9.夹苗气缸 10.提苗放苗气缸 11.夹苗片 12.右夹苗拉簧 13、17.夹苗驱动板 14.左夹苗拉簧 15.夹苗片回位扭簧 16.夹苗驱动联动板2 工作原理底座固定在钵盘移栽机机体上,夹苗气缸活塞杆伸出时推动夹苗驱动联动板,夹苗驱动联动板带动夹苗驱动板,再由夹苗驱动板拉动右夹苗拉簧、左夹苗拉簧,利用杠杆原理使夹苗片完成夹苗。
之后提苗放苗气缸的活塞杆伸出,带动夹苗提苗架沿翻转架上的滑道向上运动约3cm,实现提苗。
夹苗和提苗完成之后,翻转气缸的活塞杆伸出,推动翻转推拉架移动,使得翻转架完成翻转约90°,之后,升降气缸的活塞杆收回,带动升降架向下移动,升降架上的取苗部分随之向下移动至最低点,夹苗气缸的活塞杆收回,夹苗片在夹苗片回位扭簧的作用下松开夹持的秧苗,达到放苗的目的。
最后,升降气缸的活塞杆伸出,带动升降架向上移动,升降架上的取苗部分随之向上移动至最高点,同时提苗放苗气缸的活塞杆收回,带动夹苗提苗架沿翻转架上的滑道向下运动约3cm,回到初始取苗位置。
依次重复工作。

2023·06农业机械NONGYEJIXIE摘要:育苗移栽是蔬菜种植使用较多的方式,蔬菜穴盘苗移栽种植普遍采用人工和半自动移栽机械,劳动强度大,严重影响蔬菜种植的收益,全自动移栽种植机械已成为国内外关注的重点。
本文归纳阐述了自动移栽机核心工作部件取苗机构的研究现状,并对我国蔬菜移栽种植较为典型的新疆进行介绍和分析。
针对我国蔬菜穴盘苗移栽种植模式和技术多样、育苗穴盘尺寸不一、移栽效率低的现状,指出我国蔬菜穴盘苗移栽应与宜机化改造深度融合,注重控制育苗穴盘质量,向育苗标准化、自动取苗装置智能化方向发展。
关键词:蔬菜穴盘苗;育苗;移栽;自动取苗蔬菜穴盘苗育苗移栽可以避开春季灾害性天气,延长生育期,提高产量和品质,在农业生产中得到应用。
机械化移栽蔬菜穴盘苗时,半自动移栽机可以降低劳动强度,但只做到了省力不省工,移栽效率并没有显著提高[1],而自动移栽机可显著提高移栽效率,减少用工。
国外移栽机自动化程度较高,但是与我国的蔬菜种植模式、育苗农艺不相符,我国在移栽机取苗机构、取苗末端执行器的结构上进行了大量研究。
本文对相关研究进行综述,对我国典型地区的蔬菜移栽机使用现状进行介绍,分析我国蔬菜穴盘苗自动移栽机取苗装置存在的不足,并对未来开展取苗装置研究提供思路。
1自动取苗机构研究现状自动取苗机构是自动移栽机的核心部件,按照取苗方式的不同,可以分为夹针式取苗、夹茎式取苗、顶出式取苗和顶出-夹取式取苗。
1.1夹针式取苗夹针式取苗爪较为先进的有荷兰飞梭公司研制的PC-21型温室穴盘苗自动移栽机,可以实现穴盘苗从高密度盘向低密度盘移栽(图1)。
该机包含气力驱动取苗爪、自动分苗机构和穴盘输送装置,整排8个4针结构取苗爪可以实现12000~16800株/h 穴盘苗的移栽,移栽效率非常高。
日本有多家企业研制了夹针式蔬菜穴盘苗移栽机,如洋马PF2R 型自动移栽机,取苗爪为两根片状的夹针,取苗爪由滑槽控制取投苗运动,用一个凸轮控制夹针的张合,该机的移栽速度约45株/min (图2)。
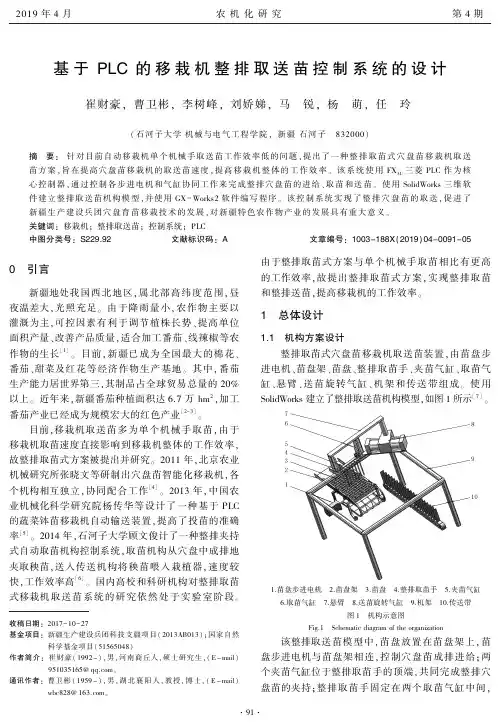
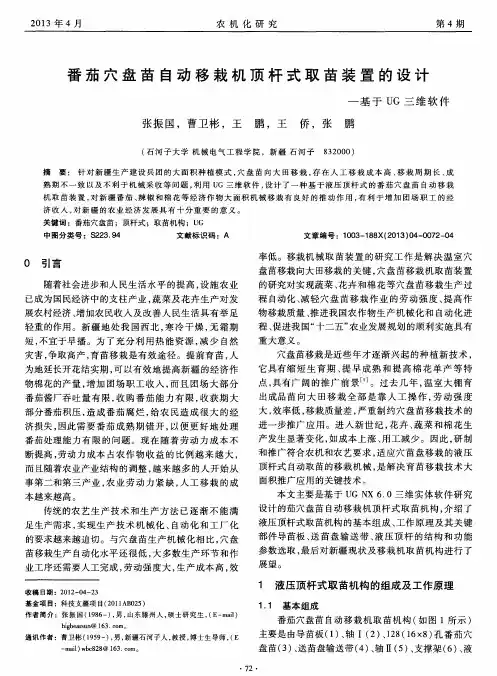
基于PLC的移栽机整排取送苗控制系统的设计崔财豪ꎬ曹卫彬ꎬ李树峰ꎬ刘娇娣ꎬ马㊀锐ꎬ杨㊀萌ꎬ任㊀玲(石河子大学机械与电气工程学院ꎬ新疆石河子㊀832000)摘㊀要:针对目前自动移栽机单个机械手取送苗工作效率低的问题ꎬ提出了一种整排取苗式穴盘苗移栽机取送苗方案ꎬ旨在提高穴盘苗移栽机的取送苗速度ꎬ提高移栽机整体的工作效率ꎮ该系统使用FX3U三菱PLC作为核心控制器ꎬ通过控制各步进电机和气缸协同工作来完成整排穴盘苗的进给㊁取苗和送苗ꎮ使用SolidWorks三维软件建立整排取送苗机构模型ꎬ并使用GX-Works2软件编写程序ꎮ该控制系统实现了整排穴盘苗的取送ꎬ促进了新疆生产建设兵团穴盘育苗移栽技术的发展ꎬ对新疆特色农作物产业的发展具有重大意义ꎮ关键词:移栽机ꎻ整排取送苗ꎻ控制系统ꎻPLC中图分类号:S229.92㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)04-0091-050㊀引言新疆地处我国西北地区ꎬ属北部高纬度范围ꎬ昼夜温差大ꎬ光照充足ꎮ由于降雨量小ꎬ农作物主要以灌溉为主ꎬ可控因素有利于调节植株长势㊁提高单位面积产量㊁改善产品质量ꎬ适合加工番茄㊁线辣椒等农作物的生长[1]ꎮ目前ꎬ新疆已成为全国最大的棉花㊁番茄㊁甜菜及红花等经济作物生产基地ꎮ其中ꎬ番茄生产能力居世界第三ꎬ其制品占全球贸易总量的20%以上ꎮ近年来ꎬ新疆番茄种植面积达6.7万hm2ꎬ加工番茄产业已经成为规模宏大的红色产业[2-3]ꎮ目前ꎬ移栽机取送苗多为单个机械手取苗ꎬ由于移栽机取苗速度直接影响到移栽机整体的工作效率ꎬ故整排取苗式方案被提出并研究ꎮ2011年ꎬ北京农业机械研究所张晓文等研制出穴盘苗智能化移栽机ꎬ各个机构相互独立ꎬ协同配合工作[4]ꎮ2013年ꎬ中国农业机械化科学研究院杨传华等设计了一种基于PLC的蔬菜钵苗移栽机自动输送装置ꎬ提高了投苗的准确率[5]ꎮ2014年ꎬ石河子大学顾文俊计了一种整排夹持式自动取苗机构控制系统ꎬ取苗机构从穴盘中成排地夹取秧苗ꎬ送入传送机构将秧苗喂入栽植器ꎬ速度较快ꎬ工作效率高[6]ꎮ国内高校和科研机构对整排取苗式移栽机取送苗系统的研究依然处于实验室阶段ꎮ收稿日期:2017-10-27基金项目:新疆生产建设兵团科技支疆项目(2013AB013)ꎻ国家自然科学基金项目(51565048)作者简介:崔财豪(1992-)ꎬ男ꎬ河南商丘人ꎬ硕士研究生ꎬ(E-mail)951035165@qq.comꎮ通讯作者:曹卫彬(1959-)ꎬ男ꎬ湖北襄阳人ꎬ教授ꎬ博士ꎬ(E-mail)wbc828@163.comꎮ由于整排取苗式方案与单个机械手取苗相比有更高的工作效率ꎬ故提出整排取苗式方案ꎬ实现整排取苗和整排送苗ꎬ提高移栽机的工作效率ꎮ1㊀总体设计1.1㊀机构方案设计整排取苗式穴盘苗移栽机取送苗装置ꎬ由苗盘步进电机㊁苗盘架㊁苗盘㊁整排取苗手㊁夹苗气缸㊁取苗气缸㊁悬臂㊁送苗旋转气缸㊁机架和传送带组成ꎮ使用SolidWorks建立了整排取送苗机构模型ꎬ如图1所示[7]ꎮ1.苗盘步进电机㊀2.苗盘架㊀3.苗盘㊀4.整排取苗手㊀5.夹苗气缸6.取苗气缸㊀7.悬臂㊀8.送苗旋转气缸㊀9.机架㊀10.传送带图1㊀机构示意图Fig.1㊀Schematicdiagramoftheorganization该整排取送苗模型中ꎬ苗盘放置在苗盘架上ꎬ苗盘步进电机与苗盘架相连ꎬ控制穴盘苗成排进给ꎻ两个夹苗气缸位于整排取苗手的顶端ꎬ共同完成整排穴盘苗的夹持ꎻ整排取苗手固定在两个取苗气缸中间ꎬ取苗气缸控制整排取苗手将穴盘苗从苗盘里整排取出ꎬ取苗气缸和夹苗气缸共同作用完成穴盘苗的整排夹取ꎻ送苗气缸旋转90ʎꎬ将整排穴盘苗从苗盘位置送至输送带上方ꎬ之后取苗气缸和夹苗气缸动作将穴盘苗放置在输送带上ꎮ取送苗机构置于机架的顶端ꎬ苗盘架置于机架下方ꎬ输送带和苗盘架并排放置ꎬ且待取的苗盘首行(苗盘架前端第1行)与输送带相互垂直ꎮ整排取苗式穴盘苗移栽机取送苗装置工作过程如下:苗盘在苗盘步进电机作用下依次进给1排穴盘苗ꎬ整排取苗手在取苗气缸的作用下下降至取苗位置ꎬ夹苗气缸控制整排取苗手完成穴盘苗的夹持ꎬ随后上升ꎬ由送苗旋转气缸带动整排取苗手旋转至输送带位置ꎬ下降并将整排穴盘苗放置在输送带上ꎮ1.2㊀控制系统方案的设计该控制系统由上位机监测系统㊁运动控制模块㊁驱动模块㊁执行模块和传感器模块组成ꎮ其中ꎬ上位机监控系统通过与现场数据的实时交换对系统进行实时监控ꎻ运动控制模块使用三菱PLC作为核心控制器ꎬ通过发送控制命令实现对执行部件的控制ꎻ驱动模块包括电机驱动和气缸驱动ꎬ分别为各执行部件提供动力ꎻ执行模块是为了完成作业要求ꎬ实现各种运动的机械部件ꎬ包含步进电机和气缸ꎻ传感器模块采集执行机构的位置信息反馈给控制器ꎮ各模块协调工作ꎬ共同完成整排穴盘苗的进给㊁取苗和送苗ꎬ控制方案框图如图2所示ꎮ图2㊀控制方案框图Fig.2㊀ControlSchemeblockdiagram2㊀控制系统硬件设计整排穴盘苗的抓取通过整排机械手来完成ꎬ整排取苗手的动作通过固定在整排取苗手顶端的夹苗气缸和取苗气缸来实现ꎮ整排穴盘苗的进给通过苗盘步进电机和链轮来实现ꎬ穴盘苗传送通过旋转气缸来实现ꎮ整排穴盘苗的取送分别通过气缸的伸缩来实现ꎬPLC执行相应程序来控制气缸的伸缩完成穴盘苗的夹取ꎮ磁性开关为电磁阀提供信号ꎬ当气缸走到指定位置时ꎬ磁性开关给PLC发出信号ꎬPLC通过程序控制电磁阀关闭ꎬ气缸停止运动ꎮ气源为气缸的动作提供动力ꎬAC220V电源为PLC供电ꎬDC24V电源为驱动器㊁电磁阀㊁接近开关和磁性开关供电ꎮ气缸控制硬件框图如图3所示ꎮ图3㊀控制系统硬件框图Fig.3㊀Controlsystemhardwareblockdiagram整排取苗手对穴盘苗的夹持和取送均由气缸动作来完成ꎮ气动驱动系统由空气压缩机㊁储气罐㊁空气过滤器㊁减压阀㊁油雾器㊁二位五通电磁换向阀㊁节流阀㊁取苗手驱动气缸及苗盘更换驱动气缸等组成ꎮ空气压缩机压缩空气为气动系统的正常工作提供足够流量和压力的压缩空气ꎻ储气罐储存气体ꎬ同时起稳定系统压力的作用ꎻ空气过滤器㊁减压阀和油雾器组成的启动三联件对压缩的空气进行处理ꎮ各驱动气缸均由二位五通电磁换向阀控制ꎬ并分别由节流阀调节速度ꎬ完成穴盘苗的整排夹持和整张苗盘的更换ꎮ气压驱动原理图如图4所示ꎮ整排穴盘苗的整排进给PLC控制步进电机来实现ꎮPLC通过步进电机驱动器控制两相步进电机动作ꎬ依次进给单个苗格的距离(即32mm)ꎬ实现穴盘苗的整排进给ꎬ电机驱动原理如图5所示ꎮ图4㊀气动驱动系统图Fig.4㊀Diagramofpneumaticcontrolsystem图5㊀电机驱动原理图Fig.5㊀Schematicdiagramofmotordriving该控制系统的电气控制模块采用以自动为主㊁手动为辅的控制模式ꎮ自动模式可以使控制系统具有快速响应和精度高的特点ꎬ但当作业环境复杂或者自动模式发生故障时ꎬ可以采用手动模式进行作业ꎬ从而保证机构能够正常运行ꎮ选用三菱公司MT型FX3UPLC作为核心控制器ꎬ其有3个高速脉冲输出端口Y000㊁Y001㊁Y002ꎬ可同时输出最高频率为100kHz的脉冲ꎬ分别接3个步进电机驱动器的脉冲端ꎬ控制步进电机旋转ꎻY003㊁Y004㊁Y005分别接3个步进电机驱动器的方向端ꎬ控制步进电机的方向[8]ꎮPLC通过步进电机驱动器控制步进电机动作ꎬ完成穴盘苗的整排进给ꎮ由于MT型PLC采用的是晶体管输出ꎬ其输出端的电压值为24Vꎬ输出电流的最大值为0.5Aꎬ因此不能直接用该输出端口驱动控制气缸的电磁阈ꎬ故需要再增加中间继电器来控制电磁阈[9]ꎮPLC通过电磁阀控制气缸的伸缩ꎬ控制整排取苗手完成穴盘苗的抓取和传送ꎬ当气缸内部的活塞杆伸缩至指定位置时ꎬ气缸上的传感器把信号传给PLCꎬPLC通过程序控制电磁阀关掉ꎬ气缸停止运动ꎮPLC输入/输出点的分配如表1所示ꎮ表1㊀PLC输入点分配Table1㊀InputdistributionofPLC参数功能描述I/O点分配磁性开关1X0磁性开关2X1磁性开关3X2磁性开关4X3磁性开关5X4输入磁性开关6X5磁性开关7X6磁性开关8X7磁性开关9X10磁性开关10X11开始按钮X12停止按钮X13复位按钮X14手动/自动X15驱动器PULY0驱动器DIRY3电磁阀1Y4输出电磁阀2Y5电磁阀3Y6电磁阀4Y7电磁阀5Y103 控制系统软件设计该系统软件主要由信号采集模块和主控制模块两部分组成ꎬ信号采集模块将信号送至PLCꎬPLC执行相应的程序ꎬ通过控制步进电机和气缸协同工作ꎬ完成穴盘苗的整排进给㊁整排穴盘苗的取送等一系列动作ꎬ程序流程图如图5所示ꎮ程序开始执行时ꎬ检测苗盘是否到位\整排机械手是否位于初始位置ꎮ如果整排机械手位于指定位置ꎬ则取苗气缸活塞杆伸出ꎬ取苗气缸顶部磁性开关变为高电平时停止ꎬ此时整排取苗手位于至苗盘上方ꎻ接着气缸动作完成穴盘苗的夹取ꎬ穴盘苗夹取之后取苗气缸活塞杆缩回ꎬ取苗气缸尾部磁性开关变为高电平时停止ꎬ同时送苗旋转气缸顺时针旋转90ʎꎬ当旋转气缸右侧磁性开关为高电平时停止ꎻ整排取苗手位于传送带正上方ꎻ随后则取苗气缸活塞杆伸出ꎬ取苗气缸顶部磁性开关变为高电平时停止ꎬ此时整排取苗手位于至输送带上方ꎬ气缸动作将穴盘苗放置在输送带上ꎻ穴盘苗放置在输送上之后ꎬ取苗气缸活塞杆缩回ꎬ取苗气缸顶部磁性开关变为高电平时停止ꎻ同时旋转气缸逆时针旋转90ʎꎬ当旋转气缸左侧磁性开关变为高电平时停止ꎬ整排取苗手位于初始位置ꎮ此时ꎬ程序检测苗盘里是否还有待取穴盘苗ꎬ若苗盘里依然有穴盘苗ꎬ则循环执行程序直至穴盘苗取送完毕ꎻ若穴盘苗已经取送完毕ꎬ则程序结束ꎮ程序流程图如图6所示ꎮ图6㊀主控制程序流程图Fig.6㊀Theflowchartofmastercontrolprogram根据机构工作步骤及程序控制流程图ꎬ使用GX-Works2编写程序ꎮ为了在编程时避免混乱ꎬ在程序检测易于发现出错点ꎬ编程时将程序分块编写ꎬ分别写入PLC内进行监控调试ꎬ待各分块程序达到预期效果后将各分块程序组合在一起ꎬ写入PLC内ꎻ在无硬件连接的情况下检测程序是否可行ꎬ在确定程序可以运行以后ꎬ连接其他硬件ꎬ控制样机空载运行并进行调试[10]ꎮ4㊀实验条件及因素分析4.1㊀实验基本条件该台架实验在石河子大学机械电气工程学院精细农业实验室进行ꎬ以128穴的 石番36号 番茄穴盘苗为实验对象ꎬ对穴盘苗进行整排取送ꎬ验证该控制系统的可行性ꎮ4.2㊀测试指标及影响因素分析对该实验台架的工作参数进行测定ꎬ通过送苗丝杆滑台的行程确定整排取苗手㊁苗盘输送机构及输送带的相对位置ꎻ通过取苗气缸的行程㊁整排取苗手和苗盘架的高度确定实验台架的整体高度ꎬ进而确定台架尺寸ꎻ通过对穴盘苗的株高㊁含水率进行测量确定被试穴盘苗的基本参数ꎻ通过台架尺寸和穴盘苗的基本参数对程序的各参数进行调整ꎬ使其满足穴盘苗的整排取送需要ꎮ重点考察夹苗气缸的压力㊁取苗气缸和送苗旋转气缸的电磁阀流量等因素对综合伤苗率和取苗成功率的影响ꎮ各指标计算公式为CSR=GDR+SDR(1)CDR=WSDWSE+WSDˑ100%(2)SDR=NDRNSˑ100%(3)SPR=WPRNSˑ100%(4)其中ꎬCSR为综合伤苗率(%)ꎻGDR为基质破损率(%)ꎻSDR为幼苗损伤率(%)ꎻSPR为取苗成功率(%)ꎻWSD为基质破损和残留质量(g)ꎻWES为穴苗取出质量(g)ꎻNS为取苗总数ꎻNDR为穴苗损伤数量ꎻNPR为穴苗取出数量[11-12]ꎮ5㊀工艺路线根据要求安装实验台架ꎬ通过设定程序参数确定取苗气缸的压力㊁取苗步进电机和送苗步进电机的速度后开始实验ꎮ首先对取苗气缸的压力进行单因素实验ꎬ考察气缸压力的大小对穴盘苗夹持的成功率及基质损伤的影响ꎬ选择合适的气缸压力ꎻ然后进行多因素实验ꎬ考察夹苗气缸压力㊁取苗气缸和送苗旋转气缸的电磁阀流量的影响ꎬ选择合适的取送频率ꎮ为了考察不同频率下该控制系统的综合性能ꎬ选取综合伤苗率和取苗成功率作为试验评价指标ꎬ设定取送苗频率进行实验ꎬ分别统计各单次实验的取送苗总数㊁取苗成功率㊁穴苗取出质量㊁基质破损和残留质量㊁穴苗损伤数量ꎬ经处理得到取苗成功率㊁送苗成功率㊁基质破损率㊁幼苗损伤率及综合伤苗率ꎻ通过数据分析得出取送苗失败或者茎叶/基质损伤的原因ꎬ改进系统控制模型ꎬ实现整排取送苗的控制ꎬ进而确定该台架的最佳取送频率ꎮ6㊀结论1)设计了穴盘苗移栽机整排取送苗机构方案ꎬ基于此设计了一种整排取送苗控制系统ꎬ提高了穴盘苗移栽机的取送苗速度及移栽机整体的工作效率ꎮ2)该控制方案完成了穴盘苗移栽机整排穴盘苗的取送ꎬ系统工作性能稳定ꎬ实验效果良好ꎬ有助于新疆特色农作物产业的发展ꎮ参考文献:[1]㊀庞胜群ꎬ王祯丽ꎬ张润ꎬ等.新疆加工番茄产业现状及发展前景[J].中国蔬菜ꎬ2005(2):43-45.[2]㊀赵晓伟ꎬ韩长杰ꎬ赵占军ꎬ等.新疆地区辣椒㊁番茄移栽机发展现状及趋势[J].农业科技与装备ꎬ2015(5):41-43. [3]㊀刘洋ꎬ李亚雄ꎬ李斌ꎬ等.新疆地区作物移栽与移栽机研究现状[J].广东农业科学ꎬ2013ꎬ40(9):189-191ꎬ196. [4]㊀张晓文ꎬ刘文玺ꎬ程存仁ꎬ等.设施内穴盘苗智能化移栽机的开发及应用[C]//中国农业工程学会2011年学术年会论文集.重庆:中国农业工程学会(CSAE)ꎬ2011:4.[5]㊀杨传华ꎬ方宪法ꎬ杨学军ꎬ等.基于PLC的蔬菜钵苗移栽机自动输送装置[J].农业机械学报ꎬ2013ꎬ44(S1):19-23ꎬ18.[6]㊀顾文俊ꎬ曹卫彬ꎬ李卫敏ꎬ等.穴盘苗顶杆式取苗机构的自动化控制系统设计[J].农机化研究ꎬ2013ꎬ35(12):108-111.[7]㊀马振ꎬ胡斌ꎬ李俊虹.移栽机自动化送盘装置的关键部件及送盘方法的设计分析[J].农机化研究ꎬ2017ꎬ39(1):68-71.[8]㊀高扬.三菱FX3U系列PLC对Kinco2S56Q-02054型步进电动机的控制[J].科技创新与应用ꎬ2017(10):161. [9]㊀蒋浩.基于PLC的工业机械手运动控制系统设计[D].南京:南京信息工程大学ꎬ2012.[10]㊀李元强ꎬ陆强强ꎬ辜松.基于PLC的温室自动化苗床输送系统的研究[J].农机化研究ꎬ2016ꎬ38(5):152-155. [11]㊀倪有亮ꎬ金诚谦ꎬ刘基.全自动移栽机取送苗系统的设计与试验[J].农业工程学报ꎬ2015ꎬ31(23):10-19. [12]㊀韩绿化ꎬ毛罕平ꎬ严蕾ꎬ等.穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J].农业机械学报ꎬ2015ꎬ46(7):23-30.DesignofPickingSeedlingandFeedingSeedlingControlSystemforWholeRowofSeedlingsTransplantingMachineBasedonPLCCuiCaihaoꎬCaoWeibinꎬLiShufengꎬLiuJiaodiꎬMaRuiꎬYangMengꎬRenLing(CollegeofMechanicalandElectricalEngineeringꎬShiheziUniversityꎬShihezi832000ꎬChina)Abstract:Aimingattheproblemoflowefficiencyoffeedingseedlingofsinglemanipulatorofautomatictransplantingma ̄chineatpresentꎬaschemeoftransplantingseedlingofseedling-typeseedlingtransplanterisputforwardtoimprovethespeedoftransplantingseedlingsandimprovetheefficiencyoftransplantingmachine.TheFX3UMitsubishiPLCisusedasthecorecontrollerofthesystemꎬthroughthecontrolofthesteppermotorandthecylinderworktogetherꎬtocompletethewholerowofacupointseedlingfeedingꎬpickingseedlingsandsendingseedlings.TheSolidWorks3Dsoftwareisusedtoestablishthemodelofthewholerow-feedingseedlingmechanismꎬandtheGX-WORKS2softwareisusedtowritepro ̄grams.Thecontrolsystemrealizestheextractionoftheseedlingofthewholerowofacupointsꎬwhichpromotesthedevelopmentoftransplantingtechnologyoftheacupoint-plateseedlinginXinjiangBingtuanꎬandithasgreatsignificanceforthedevelopmentofthecharacteristiccropindustryinXinjiang.Keywords:transplantingmachineꎻwholerowofseedlingstransplantingꎻcontrolsystemꎻPLC2019年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期。
辣椒穴盘苗自动移栽机关键部件设计与试验好嘞,以下是为您创作的文案:咱今天就来唠唠辣椒穴盘苗自动移栽机这玩意儿,特别是它那些关键部件的设计和试验。
先讲讲为啥要搞这个辣椒穴盘苗自动移栽机吧。
前阵子我去了一家大型的蔬菜种植基地,那场面,可真是壮观!一整片的辣椒地望不到边。
但是呢,我发现工人们移栽辣椒苗的时候,那叫一个辛苦!一个个弯着腰,累得汗流浃背的。
我就在想,要是能有个机器来帮忙,那得多好。
这辣椒穴盘苗自动移栽机的关键部件设计可不容易。
就拿取苗部件来说,得像一双温柔又精准的手,轻轻把那娇嫩的辣椒苗从穴盘里取出来,还不能伤到苗。
为了达到这个效果,设计师们那是绞尽了脑汁。
他们反复试验不同的材质和形状,就像给小宝宝选最舒服的衣服一样,小心翼翼。
还有输送部件,这就像是一条运输的小通道,要保证辣椒苗稳稳当当地从取苗的地方送到栽种的位置。
有一次试验的时候,输送部件出了点小毛病,辣椒苗在半道上卡住了,那可把大家急坏了。
技术人员赶紧围过来,又是检查又是调试,忙得不可开交。
移栽部件也很重要,得把辣椒苗准确无误地栽到土里,深度和位置都得恰到好处。
有一回试验,因为移栽部件没调好,辣椒苗栽得歪歪扭扭的,就像一群调皮的孩子在捣乱,这可不行啊!在试验的过程中,那真是状况百出。
有时候机器突然卡住不动了,有时候栽出来的苗参差不齐。
但是大家都没有放弃,一次次地改进,一次次地重试。
经过无数次的试验和调整,这辣椒穴盘苗自动移栽机的关键部件终于越来越完善了。
想象一下,以后大片的辣椒地,不再需要那么多人辛苦弯腰劳作,一台台自动移栽机欢快地工作着,那场面得多美!这机器的出现,不仅能提高移栽的效率,还能保证辣椒苗的成活率,让辣椒长得又多又好。
总之,辣椒穴盘苗自动移栽机关键部件的设计和试验,是一个充满挑战但又充满希望的过程。
希望未来它能在更多的土地上大显身手,为咱们的农业生产带来更大的便利!不知道您觉得我这篇文案怎么样?是不是把关键部件的设计和试验说得还算清楚明白?。
大葱移栽机快速投苗装置的设计开题报告一、项目背景在现代农业生产中,大葱的种植面积较大,而大葱的种植又需要移栽。
传统的移栽方式需要大量的人工,工作效率低,成本高。
因此,设计一种自动化的大葱移栽机可以提高种植效率和降低成本。
二、项目概述本项目设计的是一种大葱移栽机的快速投苗装置,旨在实现大葱的快速移栽和投苗。
该设备通过将大葱苗移栽至设备上,经过快速定位和精确投放,实现快速大面积的移栽。
三、项目内容1. 设计一个自动移栽机器人的框架,能够实现自动规划、识别作物、移动、定位、吸盘夹取等功能。
2. 设计移栽机的机械结构和驱动系统,能够实现快速移栽和投放作物。
3. 研究移栽机器人的控制系统,使其具备自主规划工作路线、移栽作业策略和动作控制等能力。
4. 研究移栽机器人的感知系统,通过激光、视觉等传感器,实现对场地环境、作物状态等信息的全面感知和数据采集。
5. 开发大葱移栽机软件,实现机器人的功能操作控制、运动路径规划、作业记录等功能。
四、项目目标1. 设计出一套高效、稳定的大葱移栽机器人。
2. 实现大葱移栽的全自动化,包括苗种选择、规划移栽路径、定位和精确投放等操作。
3. 整套设备研发成功后,能够投入市场,并能够降低大葱种植成本,提高移栽效率。
五、项目方法1. 研究市场和用户需求,了解目标用户的需求和使用场景,以市场需求为导向,确定设计方案和技术路线。
2. 进行移栽机器人的机械结构设计,使用CAD和UG等软件进行模拟和测试,对机器人进行仿真分析和优化设计。
3. 研究机器人的控制系统,设计可靠性高、反应速度快的控制系统。
4. 研究机器人的感知系统,实现对作物状态、地形、环境等信息的感知和采集工作。
5. 进行软件系统的开发,在ROS和Python等平台上开发和测试移栽机器人控制、路径规划、作业记录等功能模块。
六、可行性分析1. 目前市场上没有专为大葱移栽设计的自动化机器人,在大葱种植领域有较大的市场需求。
2. 移栽机器人的机械结构、控制系统和感知系统技术已知,基于现有技术开发大葱移栽机器人是可行的。
温室穴盘苗移栽机的设计及试验研究的开题报告一、选题背景随着我国农业现代化进程的加快,温室种植作为一种高效、经济、环保的种植模式,已经在我国得到了广泛的应用。
在温室种植中,苗期移栽是一个重要的环节,直接影响着作物的整个生长发育周期和产量。
目前,传统的苗期移栽方式主要是人工移栽,但是由于移栽质量难以保证、效率低下、人工成本高等问题,急需有一种高效、精准、自动化的移栽方式。
二、设计目标本文的设计目标是:设计一种基于机器视觉技术的温室穴盘苗移栽机,能够自动完成苗期移栽的全部工作,具有高效、精准、稳定的特点,可以适应不同规格和品种的穴盘苗。
三、研究内容本文的研究内容主要包括以下几个方面:1. 机器视觉技术的应用:采用机器视觉技术对穴盘苗进行识别和定位,实现机器视觉指导下的自动移栽。
2. 移栽头的设计:根据穴盘苗的特点,设计一种适合的移栽头,能够快速、准确地将苗移栽到种植槽中,并保证移栽质量。
3. 移栽机构的设计:设计一种具有高效、稳定、精准移动功能的移栽机构,并采用汽缸和步进电机控制移栽头的上下和前后移动。
4. 控制系统的设计:设计一种稳定、可靠的控制系统,实现对机器视觉、移栽机构的精准控制,完成自动移栽任务。
四、研究方法本文采用以下研究方法:1. 文献调查:对国内外相关研究进行调查和综述,获取有关自动化移栽机的技术原理、设计思路和实现方法。
2. 穴盘苗特性测试:测试不同规格和品种的穴盘苗的几何尺寸、质量和生长状态等特性,为机器视觉识别提供数据支持。
3. 机器视觉实验:采用视觉传感器对穴盘苗进行识别和定位,研究机器视觉算法的可行性和精度。
4. 移栽头设计和制造:根据穴盘苗的特点和移栽机构的要求,设计一种适合的移栽头,并制造实物进行测试和验证。
5. 移栽机构设计和模拟:通过SolidWorks等软件进行移栽机构的三维建模和模拟,验证机构的可行性和稳定性。
6. 控制系统设计与实现:采用PLC和单片机等硬件和软件实现移栽机的控制系统,测试系统的可靠性和实用性。
蔬菜穴盘苗自动移栽机设计及关键技术研究摘要:本文基于蔬菜穴盘苗移栽的生产需求,设计了一种自动化移栽机。
该移栽机采用了传感器、控制系统和执行机构等关键技术,实现了对穴盘苗的自动化分选、定位和移栽。
移栽机具有高效率、高精度和低故障率等优点,适用于不同规格的穴盘苗的移栽。
关键词:蔬菜穴盘苗、自动移栽机、传感器、控制系统、执行机构1引言随着现代农业技术的不断发展和进步,蔬菜种植的自动化程度也得到了显著提高。
在蔬菜生产过程中,穴盘苗移栽是一项重要的环节,也是提高蔬菜品质和产量的关键技术之一。
然而,传统的穴盘苗移栽方式往往需要大量人力和时间,而且精度和效率都比较低,已经不能满足现代化大规模生产的需求。
因此,为了提高穴盘苗移栽的自动化程度,本文基于蔬菜穴盘苗移栽的生产需求,设计了一种自动化移栽机,并对其关键技术进行了研究。
该移栽机采用了传感器、控制系统和执行机构等关键技术,实现了对穴盘苗的自动化分选、定位和移栽,具有高效率、高精度和低故障率等优点,适用于不同规格的穴盘苗的移栽【1】。
此外,本文还介绍了移栽机的关键技术和实验结果分析,为蔬菜自动化生产提供了有益的探索和参考。
同时,随着农业科技的不断发展和进步,相信移栽机在未来的应用和发展前景也将更加广阔。
2蔬菜穴盘苗移栽机概述2.1穴盘苗移栽的生产需求在蔬菜生产过程中,穴盘苗移栽是一个非常重要的环节。
穴盘苗是指在特殊的穴盘中育苗,其种植质量稳定,发芽率高,且可有效抑制病害,成为了蔬菜生产中一种重要的育苗方式。
然而,传统的穴盘苗移栽方式存在一系列问题,如移栽效率低、移栽质量不稳定、工作强度大等。
因此,需要一种新型的穴盘苗移栽机,以提高穴盘苗的移栽效率和质量。
2.2移栽机的基本结构和工作原理蔬菜穴盘苗自动移栽机主要由料斗、分选机构、输送机构、定位机构、移栽机构、控制系统等组成。
移栽机的基本工作原理是:通过感应技术对穴盘苗进行自动分选和定位,将穴盘苗从穴盘中取出,然后通过输送机构将穴盘苗运送到移栽机构,最后由移栽机构将穴盘苗移栽到指定位置。
四夹片式钵苗移栽夹取装置的设计及分析四夹片式钵苗移栽夹取装置的设计及分析摘要:钵苗移栽是园艺生产中重要的环节之一。
为了提高钵苗移栽的效率和准确性,本文设计了一种四夹片式钵苗移栽夹取装置。
该装置由夹取机构、支撑结构和控制系统三部分组成。
通过对该装置的设计、分析和实验验证,发现该装置能够夹取并稳定地移栽钵苗,提高移栽效率,减少劳动强度。
关键词:钵苗移栽;四夹片式夹取装置;效率;准确性;劳动强度1 引言钵苗移栽是现代园艺生产过程中常见的操作之一。
传统的钵苗移栽方式是使用人工夹取或工具移栽,不仅效率低下,而且容易损坏苗木根部。
针对这一问题,本文设计了一种四夹片式钵苗移栽夹取装置,旨在提高移栽效率和准确性。
2 设计原理2.1 夹取机构四夹片式夹取机构是本装置的核心部分。
该夹取机构由四个夹片组成,可以通过控制系统实现夹取和释放的动作。
夹片材质采用耐磨损、耐高温的材料制作,确保夹取的稳定性和可靠性。
2.2 支撑结构支撑结构用于固定和支撑移栽装置。
它由钢材制成,并设置了合适的角度和高度,使得夹取装置能够顺利夹取和放置钵苗,并稳定不倾斜。
2.3 控制系统控制系统是实现夹取和释放动作的关键。
本装置采用电动机驱动夹取机构,通过控制器实现夹取和释放的动作。
控制系统还可以根据具体情况调整夹取和放置的力度,保证移栽的准确性和稳定性。
3 设计步骤3.1 夹取力度的确定通过实验测量得到钵苗的平均夹取力度,以此确定夹取机构的设计参数,确保夹取力度适中,既能保持苗木的稳定性,又不会损伤苗木。
3.2 装置尺寸的确定通过对钵苗的尺寸测量得出装置的设计参数,包括夹取机构和支撑结构的尺寸,确保夹取装置能够适应不同规格的钵苗。
3.3 控制系统的设计根据实际需要设计电动机和控制器的参数,确保夹取和释放的动作能够顺利进行。
4 实验与结果分析在设计和制作完成后,我们进行了一系列的实验来验证该装置的效果。
实验结果表明,该装置能够稳定地夹取和放置钵苗,移栽效率明显提高,准确性得到了有效保证,劳动强度也得到了明显减轻。
棉花铺膜移栽机自动上苗系统的设计研究的开题报告一、选题背景及研究意义随着现代农业技术的不断发展,越来越多的农业机械被应用到农业生产中,以提高作业效率和质量。
由于移栽是农业生产中比较重要的一个环节,因此移栽机也开始广泛应用。
然而目前市场上的移栽机普遍存在着苗开始长大前,移栽机输送苗口的方向不正确、上苗数量不能自动调节等问题。
为此,本项目研究了移栽机自动上苗系统。
该系统主要用于操作员在移栽前设置好苗数量和苗行间距,然后由系统自动调节传送带宽度,将苗自动上移栽机。
同时,系统可以在根据苗的大小自动调节上苗间距,并且对于大小不一的苗,在输送时也可以进行自动分类。
二、研究内容首先需要设计和制作一个移栽机自动上苗系统的机械结构,包括传送带、上苗机构等。
此外,还需要设计一套自动控制系统,包括 PLC、电机、传感器等电控元件,以实现自动调节传送带宽度、苗行间距和分类等功能。
三、研究方法1. 机械结构设计方法依据移栽机的实际需求和工作原理,采用计算机辅助设计软件进行机械结构设计,绘制出移栽机自动上苗系统的三维模型和零件图,然后进行加工、装配和调试。
2. 自动控制系统设计方法采用现代开发工具和技术,如PLC编程,采用传感器进行苗的识别和计数,利用驱动电机来控制传送带宽度和速度,实现自动上苗、自动间距调节、自动分类等功能。
四、预期成果该项目预计能够开发出移栽机自动上苗系统,并实现自动上苗、自动间距调节和自动分类等功能,以提高移栽机的作业效率和质量。
五、研究计划安排1. 第一阶段:调研分析现有移栽机,确定系统需求(2周);2. 第二阶段:机械结构设计、制作和调试(6周);3. 第三阶段:自动控制系统设计、编程和调试(8周);4. 第四阶段:对系统进行整机测试和性能评估(2周)。
六、团队组成本项目由机械设计师、电气工程师和软件工程师组成,合作完成机械结构设计和自动控制系统设计。
七、项目预算本项目预算为10万元,其中机械结构设计和制作占50%,自动控制系统设计和编程占30%,整机测试和性能评估占20%。
任务书课题名称单行蔬菜钵体苗自动移栽机的设计—取苗装置设计主要任务与目标现代的中国是一个经济飞速发展的中国,是一个农业大国,更是一个工业大国,我国也有越来越多的重视农业与工业的结合,将工业机械用于农业,以减轻人力操作,增加作业效率,蔬菜移栽机也更多的在进行开发并投入使用价值,对于这方面的研究也更加有意义。
所以,我们结合所学,应用三维仿真软件,初步设计出移栽机的取苗机构,为以后的进一步研究做基础。
主要内容与基本要求1、查找国内外相关文献资料,了解西方发达国家和我国蔬菜移栽机方面的区别、合理之处机器弊端2、收集整理其他国家对于移栽机的分类及其成果3、整理数据资料落实写作。
4、通过对文献的研究和分析,具体描述我国农业机械尤其是自动移栽机的发展和展望。
5、通过上述分析,设计蔬菜自动移栽机。
要求:1.文献综述报告(不少于3000字)一篇2.开题报告一篇3.毕业论文一篇(不少于10000字)4.实习日记、实习报告3000字以上主要参考资料及文献阅读任务[1]我国蔬菜育苗移栽机械化的现状与发展方向,/2007/3-5/94922.htm[2]陈殿奎.蔬菜机械化育苗的现状与展望[J].农业工程学报,1990,(12):20~25.[3]G. V. Prasanna Kumar ;H. RahemanInternational Journal of VegetableScience,V ol.14,No.3,232-255[4]Konosuke TSUGA. Development of fully automatic vegetable transplanter.JARQ 34, 21~28 (2000)[5]王君玲,高玉芝,李成华.蔬菜移栽生产机械化现状与发展方向.农机化研究,2004(02):22~28[6]张波屏.现代种植机械工程[M].北京:机械工业出版社,1997.[7]封俊.论我国早地栽植机械的开发前景与方向[J].中国农机化,2000,(4):12~13.[8]俞高红,陈志威,赵匀,孙良,叶秉良椭圆一不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究DoI:10.390l,JME.2012.13.032[9]毛君, 毕长飞.基于Pro/Engineer 采煤机的三维动态仿真与优化设计[J].煤矿机械,2006,27(6) : 990-994.外文翻译任务(见外文翻译)计划进度:起止时间内容2013.01.07~2013.01.12 调研、信息汇总,文献查阅分析2013.01.13~2013.01.30 外文翻译、文献综述、开题报告,并熟悉理论力学、机械原理等相关知识2013.01.31 ~2013.03.01 提交开题报告、文献综述及外文翻译2013.03.02~2013.03.08 开题答辩2013.03.09~2013.03.16 蔬菜移栽机整体方案设计2013.03.17~2013.03.30 取苗机构设计及零部件设计2013.03.31~2013.04.11 三维CAD建模、装配2013.04.12~2013.04.24 三维运动学分析仿真2013.04.25~2013.05.02 结构改进设计及毕业论文撰写2013.05.03~2013.05.10 完成并提交毕业论文2013.05.11~2013.05.24 整理材料准备答辩2013.05.25~2013.05.29 论文答辩实习地点指导教师签名年月日系意见系主任签名:年月日学院盖章主管院长签名:年月日文献综述报告班级姓名课题名称单行蔬菜钵苗自动移栽机的设计—取苗装置设计文献综述目录1前言2国外蔬菜自动移栽机的发展和研究成果3国内蔬菜自动移栽机发展和研究成果4国内外蔬菜自动移栽机动态与趋势5总结参考文献(报告全文附后)指导教师审批意见签名:年月日单行蔬菜钵苗自动移栽机的设计—取苗装置设计1前言据FAO统计,2006年中国已成为世界上最大的蔬菜生产国,蔬菜产量约占世界总产量的49.6%[1]。
2012年5月农机化研究第5期穴盘倒置式取苗装置的取苗特性试验研究程前,胡斌,王国平(石河子大学机械电气工程学院,新疆石河子832003)摘要:基于穴盘倒置式自动取苗装置,在对番茄穴盘苗的质量、苗高、茎秆直径、冠形尺寸和含水率等基本参数测试分析的基础上,进行了番茄穴盘苗不同含水率下脱离穴盘时的拉出力试验和分苗过程中沿倾斜滑轨滑落试验及挡苗杆位置配置和输送带的位置确定等试验。
同时,探讨了番茄穴盘秧苗取苗机理,为自动取苗分苗装置机构的设计提供了理论依据。
关键词:番茄穴盘苗;取苗分苗特性;正交试验中图分类号:s233.74文献标识码:A文章编号:1003—188X(2012)05—0170—040引言番茄机械化育苗移栽是新疆兵团“十一五”期间重点发展推广的一种新型高效栽培技术…。
目前,育苗移栽技术已在我国广泛推广应用,多种移栽机械不断投入生产使用旧J。
研究发现,影响移栽效率的主要因素有栽植均匀度、栽植状态、栽植生产率、栽植机适应性和栽植自动化等5个方面…。
栽植均匀度以及栽植状态取决于栽植器;而取苗分苗方式和栽植速度是影响栽植生产率的最主要因素。
目前对栽植器研究已经比较成熟,所以除去要配套种植模式以外,栽植前的取苗分苗工作成为影响移栽机移栽效率的重要因素。
但是目前对栽植前的取苗分苗工作研究的却不多,如杯式番茄穴盘秧苗移栽机H J、吊篮式移栽机【51和导苗管式移栽机_6’等栽植作业前的取苗分苗基本上都是人工取苗分苗后喂入栽植器内,效率低。
取苗分苗必定要涉及取秧、拔秧等机构的研究,涉及番茄秧苗的各种物理及机械特性【7J:如番茄穴盘苗的质量、苗高、茎秆直径、冠形尺寸和含水率等基本参数以及番茄穴盘苗不同含水率下脱离穴盘时的拉出力及分苗过程中沿倾斜滑轨滑落情况等。
本文对基于穴盘倒置式自动取苗分苗装置旧1进行了试验研究和分析。
1倒置式取苗装置的结构及工作原理收稿日期:201l~07一17基金项目:石河子大学研究生创新基金项目(Y J C x2010一Y15);石河子大学蓖大科技攻关计划项目(gxj也0l O—zd9903—02)作者简介:程前(1986一),女,乌鲁木齐人,硕士研究生,(E一t l ai l) chengyi‰l yu@126.com。