气动系统建模仿真设计
- 格式:doc
- 大小:421.50 KB
- 文档页数:23
气动建模方法、系统及装置与流程一、气动建模的概念气动建模是指利用气动力学原理和建模方法对气流、气体动力系统进行建模和仿真分析的过程。
通过气动建模,可以对气体动力系统的性能、工作原理和流动特性进行研究和优化,为设计和改进气体动力系统提供依据。
二、气动建模的方法气动建模主要采用计算流体力学(CFD)方法和试验验证相结合的方式进行。
其中,CFD方法通过对流动的方程进行离散化和求解,模拟气体动力系统中的流动过程;而试验验证则通过实际测量和实验验证,验证建模结果的准确性和可靠性。
三、气动建模的系统和装置气动建模系统由计算机、建模软件和仿真工具等组成。
计算机作为气动建模的主要工具,用于进行计算和仿真分析;建模软件则提供了建模的界面和工具,辅助用户进行建模和仿真;仿真工具则提供了模拟和分析气动系统的功能,用于评估系统的性能和优化设计。
四、气动建模的流程气动建模的流程主要包括问题定义、建模准备、建模和分析、结果评估和优化改进等步骤。
1. 问题定义:明确需要建模和分析的气体动力系统的问题和目标,确定建模的范围和要求。
2. 建模准备:收集和整理与建模相关的数据和信息,包括系统的几何参数、流体特性和边界条件等。
3. 建模和分析:根据建模准备阶段的数据和信息,利用建模软件进行建模和分析。
根据系统的特点和要求,选择适当的建模方法和模型,并进行仿真计算和分析。
4. 结果评估:对建模和分析的结果进行评估和验证,与实际数据进行对比和分析,评估建模的准确性和可靠性。
5. 优化改进:根据结果评估的反馈,对建模和分析进行优化和改进,提高模型的准确性和可靠性。
五、气动建模的注意事项在进行气动建模时,需要注意以下几点:1. 数据准确性:建模的结果和分析的准确性和可靠性与所使用的数据和参数密切相关,因此需要确保数据的准确性和可靠性。
2. 建模方法选择:根据系统的特点和要求,选择适当的建模方法和模型,合理选择离散化方法和求解算法,以获得准确和可靠的建模结果。
基于AMESim的气动系统建模与仿真技术研究(版本A)本文主要内容如下(1)推导气体的流量、温度和压力方程。
(2)基于AMESim对普通气动回路进行仿真分析。
并推导气动系统常用元件的数学方程,在此基础上对气动元件及系统进行模型仿真分析。
(3)对气动比例位置系统进行建模与仿真研究,在系统仿真模型基础上进行故障仿真研究。
最后探讨基于 AMESim 的气动比例位置系统实时仿真研究。
1.气动系统建模的理论基础气动系统和元件建模的首要任务就是要充分的明确空气的物理性质和空气的热力学性质,为准确的元件建模和系统仿真奠定基础。
气动元件的结构是十分复杂的,但其中的基本规律和数学描述一般还是比较清楚的。
经过前人的大量研究发现,气动系统的动态特性从本质上讲可以抽象为由一些基本环节所组成,比如放气环节、惯性环节和气容充气环节等等。
而它们之间又是通过压力、力、位移、容积等参数相互关联相互影响的。
1.1 流量方程流量特性表示元件的空气流通能力,将直接影响气动系统的动态特性。
所有的压力降取决于下面两个基本参数:a)声速流导 C(Sonic Conductance)——[null]b)临界压力比b(Critical Pressure Ratio)[S*m4/kg]ISO6358标准孔口——标准体积流量设绝对温度T ,绝对压力p的工况下的体积流量为Q,基准状态和标准状态下的体积流量可表示为:空气压缩机的输出流量通常用换算到吸入口的大气状态下的体积流量来表示。
以上公式同样适用于从吸入口的大气状态到基准或标准状态的换算。
气动孔口流量在气动系统中,一般需要计算通过节流口的气体压力、流量、温度等参数,但是由于气体的可压缩性,气体在通过节流口时是个很复杂的过程,节流口前后的流道突然收缩或扩张,气体在孔口前后均会形成涡流,产生强烈的摩擦,因而机械能变成热能具有不可逆过程。
同时,由于流体运动的极不规则,同一界面上的各点参数极不均匀。
为了研究气体的流量特性,基本上可将阀中的节流口理想地等价为一个小孔或收缩喷嘴,并用小孔或者收缩喷嘴的流量特性来表示其流量特性。
Solidworks的液压和气动系统设计技巧液压和气动系统在现代工程设计中扮演着至关重要的角色。
它们能够将能量转换成力或运动,并广泛应用于许多领域,包括工业机械、汽车、航空航天等。
而在这个过程中,Solidworks作为一种专业的计算机辅助设计(CAD)工具,为液压和气动系统的设计提供了许多有效的技巧。
本文将介绍一些Solidworks中液压和气动系统设计的关键技巧,以帮助工程师在设计过程中更加高效和准确。
首先,一个成功的液压和气动系统设计往往需要进行模拟和分析。
Solidworks提供了一套强大的仿真工具,可以帮助工程师更好地理解系统的工作原理和性能。
在设计过程中,通过使用Solidworks Flow Simulation插件,可以模拟液压和气动系统的流体流动、压力分布以及各种特性。
通过对液压和气动系统的仿真分析,可以发现并解决设计中的潜在问题,提高系统的效率和性能。
其次,准确建模是液压和气动系统设计的关键。
在Solidworks中,建模主要通过创建合适的零件和组装来完成。
对于液压和气动系统,必须精确地建立零件的几何形状和参数,以确保系统的工作正常。
在建模过程中,可以使用Solidworks的各种工具,如旋转、镜像、偏移等,来快速生成复杂的几何形状。
此外,通过使用Solidworks的装配功能,可以准确地将零件组装在一起,并模拟其在真实工作条件下的动作。
接下来,对于液压和气动系统,密封件的设计也是至关重要的一环。
Solidworks提供了一些有用的工具和功能来帮助工程师设计和分析密封件。
例如,Solidworks的设计验证工具可以模拟密封件在不同工作条件下的变形和应力分布,并根据结果进行优化。
同时,Solidworks还提供了多种与密封件相关的特征和命令,如填充特征、切割特征等,来帮助工程师创建复杂的密封结构。
通过合理设计和优化密封件,可以减少系统的泄漏和损耗,提高系统的可靠性和效率。
此外,Solidworks还提供了一些扩展工具和插件,可以进一步提升液压和气动系统的设计能力。
液压气动系统设计及仿真软件FluidSIM3.5
破解文件在安装文件中的Crack里,这两个文件分别对应气压和液压的程序,覆盖到安装文件中的同名文件就可以了!
31个压缩包
请问楼主,这三十一个压缩报先装哪个呢?
我解压了第一个包,都安装完成了破解也正常,剩余的包好象内容也和第一个一样啊?一解就提示是否覆盖第一个包?是不是装第一个包的内容就可以了呢?其余包的内容怎么处理?
正确的装法请说明一下,
多谢!
我的神啊!全下载后,只需解压一个,就OK了!好好研究一下WINRAR压缩软件!不管怎样,安装可运行就OK!。
呼吸机高频振荡通气系统仿真建模与分析徐欢;陈再宏;胡燕海;刘广清;张伟杰【期刊名称】《机械制造》【年(卷),期】2024(62)3【摘要】提出一种综合呼吸机、呼吸管路、人体呼吸系统的呼吸机高频振荡通气系统仿真模型。
根据呼吸机气动方案,以及呼吸系统的ExtendedRIC模型,应用Simscape多域物理建模软件,搭建呼吸机高频振荡通气系统仿真模型。
对于呼吸机气动回路中的各零部件,通过使用Simscape软件相应模块进行模拟。
人体呼吸系统根据工作机理,选用适当的模块组合进行模拟。
将呼吸机模型与呼吸系统模型进行连接,并加入相应控制系统,形成完整的仿真模型。
使用由高频振荡呼吸机与ASL5000主动模拟肺组成的试验平台,对仿真模型进行性能对比,以验证合理性。
在HFO+CPAP和HFO+IPPV模式下,仿真模型测得的压力、流量、潮气量波形与试验平台测得的相应数据波形相比,偏差较小。
将仿真与试验数据导入SPSS数据分析软件,进行比较分析,发现仿真与试验数据具有较好的一致性。
呼吸机高频振荡通气系统仿真模型能够有效模拟呼吸机高频振荡通气时与患者呼吸系统间的相互作用,突破了现有通气模型仅考虑人体呼吸系统的局限性,具有实用价值。
【总页数】6页(P52-57)【作者】徐欢;陈再宏;胡燕海;刘广清;张伟杰【作者单位】宁波大学机械工程与力学学院;宁波戴维医疗器械股份有限公司【正文语种】中文【中图分类】TH778【相关文献】1.高频振荡呼吸机辅助通气在新生儿呼吸窘迫综合征中的应用分析2.叩背联合高频胸壁振荡排痰护理法对减少患者呼吸机相关性肺炎发生与机械通气时间的效果分析3.综合预见性护理联合高频振荡排痰对行机械通气患者呼吸机相关性肺炎的预防作用4.呼吸机无创高频振荡通气在极低出生体质量儿呼吸窘迫综合征42例中的疗效分析5.双水平无创呼吸机高频振荡通气在NRDS中的应用效果分析因版权原因,仅展示原文概要,查看原文内容请购买。
一、实验目的1. 了解气动系统的基本原理和组成;2. 掌握气动仿真软件的使用方法;3. 通过仿真实验,验证气动系统理论知识的正确性;4. 提高分析问题和解决问题的能力。
二、实验原理气动系统是利用压缩空气作为动力源,通过管道、阀门、执行器等元件实现能量转换和传递的装置。
气动仿真实验主要是通过计算机软件模拟气动系统的运行过程,分析系统性能和优化设计。
三、实验仪器与设备1. 气动仿真软件:如MATLAB/Simulink、ANSYS Fluent等;2. 气动元件:气缸、气阀、管道等;3. 计算机一台。
四、实验步骤1. 确定实验方案:根据实验要求,设计气动系统,包括元件选型、连接方式等;2. 建立仿真模型:利用气动仿真软件,建立所设计气动系统的仿真模型;3. 设置参数:根据实际工况,设置仿真模型中的参数,如压力、流量、时间等;4. 运行仿真:启动仿真软件,运行仿真实验,观察系统运行状态;5. 数据分析:分析仿真实验结果,验证理论知识的正确性;6. 优化设计:根据仿真结果,对气动系统进行优化设计。
五、实验结果与分析1. 实验结果:通过仿真实验,得到气动系统的压力、流量、速度等参数随时间的变化曲线;2. 分析:(1)验证了气动系统理论知识的正确性,如气缸输出力与输入压力的关系;(2)分析了气动系统性能,如压力损失、流量分配等;(3)通过仿真实验,发现气动系统在实际运行中存在的一些问题,如气缸启动时间过长、流量分配不均等。
六、实验总结1. 通过本次实验,掌握了气动仿真软件的使用方法,提高了分析问题和解决问题的能力;2. 验证了气动系统理论知识的正确性,加深了对气动系统运行原理的理解;3. 发现了气动系统在实际运行中存在的问题,为优化设计提供了依据。
七、实验建议1. 在实验过程中,应注重理论与实践相结合,提高实际操作能力;2. 针对不同实验项目,灵活运用所学知识,进行综合分析和设计;3. 注重实验数据的准确性和可靠性,为后续研究提供有力支持。
气动传动控制系统的建模与仿真气动传动控制系统是工业机械领域中使用较为广泛的一种传动结构,它通过压缩空气来实现对机械运动的控制。
在现代工业生产中,气动传动控制系统广泛应用于车间自动化控制、机械加工、物流输送等各个领域。
为了提高气动传动控制系统的性能和可靠性,进行建模和仿真是非常必要的。
气动传动控制系统的建模过程气动传动控制系统是由多个部分组成的,需要对每个部分进行建模。
首先是执行元件部分,包括气缸、气动阀等,它们通过压缩空气来引起机械运动。
其次是控制部分,包括PLC、传感器等,它们用于检测和响应气动传动系统的运动状态。
最后是动力元件部分,包括气压源等,提供气缸运作所需的气体压力。
在进行建模之前,需要确定气动传动控制系统的工作流程和运动方式。
建立数学模型时,需要根据不同部分的特性考虑各种影响因素,如气体特性、传动件材料和运动方式等。
通过对系统各部分进行建模,可以对系统完整性进行评估,以确定哪些方面需要改进或优化,这可以有效提高系统设计和维护的效率。
气动传动控制系统的仿真过程仿真是对某个实际系统或场景的虚拟化模拟,并在计算机上进行模拟测试。
针对气动传动控制系统,仿真可以对其运行情况进行模拟分析,并对系统的运行结果进行验证和修改。
通过模拟分析,在实际工程应用前就能够预测系统的性能和可靠性问题,进行优化设计,确保系统能够在实际应用中正常运行。
在仿真过程中,需要将系统各个部分的数学模型进行集成和优化,进行系统整体仿真。
此过程需要使用专业的仿真软件,如MATLAB/Simulink等,进行模拟运行和数据统计分析。
仿真结果将反馈给系统设计者进行迭代,直到系统满足设计要求为止。
气动传动控制系统仿真的应用与发展气动传动控制系统的建模和仿真已经广泛应用于工业生产中。
利用仿真技术,可以设计更加优化的气动传动控制系统,提高工业生产效率和资产利用率。
未来气动传动控制系统仿真技术的发展,将表现在模型精度的提高、仿真工具的多样化、优化算法的应用等方面。
气压控制伺服系统的数学建模及仿真模型建立关于气动伺服系统的数学建模,主要是通过分析系统的运动规律,运用一些己知的定理和定律,如热力学定律、能量守恒定律、牛顿第二定理等,通过一些合理而必要的假设和简化,推导出系统被控对象的基本状态方程,并将其在某一工作点附近线性化,从而获得的一个近似的数学模型。
虽然这些模型不是很准确,但还是能够反映出气动伺服控制系统的受力和运动规律,并且借此可以分析出影响系统特性的主要因素,给系统的进一步分析和控制提供依据和指导。
另外,利用Simulink 工具包可以不受线性系统模型的限制,能够建立更加真实的非线性系统,同时其模型分析工具包括线性化和精简工具。
因此,本文在数学模型的基础之上,利用Simulink 对所研究的气压力控制系统尝试建立一个非线性数学模型,并对该模型进行计算机仿真。
由于气动系统的非线性,如气体的压缩性较大,且在气缸的运动过程中容腔中气体的各参数和变量是实时变化的,所以对气动系统的精确建模是比较困难的。
所以为了建立系统的模型,我们对控制系统作一些合理的假设,来简化系统的数学模型。
假设如下:(1)气动系统中的工作介质—空气为理想气体; (2)忽略气缸与外界和气缸两腔之间的空气泄漏; (3)气动系统中的空气流动状态为等熵绝热过程; (4)气源压力和大气压力恒定;(5)同一容腔中的气体温度和压力处处相等。
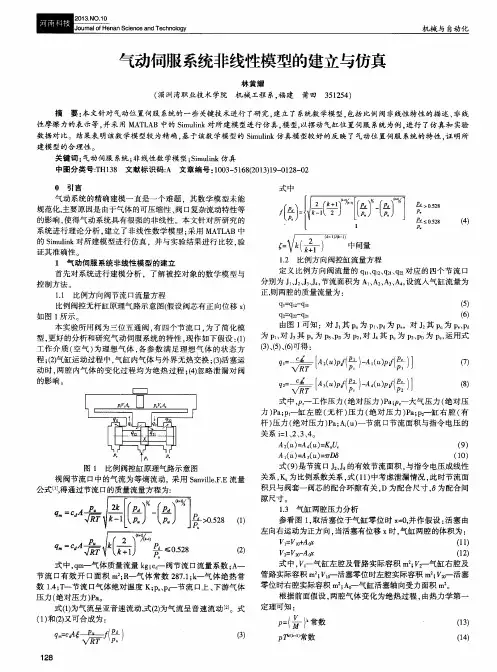
1) 比例阀的流量方程在实际的伺服控制系统中气体的流动过程十分复杂,气动元件研究中使用理想气体等熵通过喷管的流动过程来近似代替。
一般计算阀口的流量时采用Sanville 流量公式:kk s d k sdsm P P P P k RT k P q 1212A +⎪⎪⎭⎫ ⎝⎛-⎪⎪⎭⎫⎝⎛-= 0.528<sdP P ≤1 )1(212A 11+⎪⎭⎫⎝⎛+=-k RT k k P q k s m 0≤sd P P≤0.528其中:P s—为阀口上游压力;Pd—为阀口下游压力。
0.528为临界压力比。
当阀口上、下游的压力比小于等于0.528时,气体通过阀口的流量达到最大值,即气体以音速流动,此时下游压力的降低不会使质量流量再增加,出现了所谓的“壅塞”现象,这种现象使气体流经阀时具有很强的非线性,也是以空气作为传动介质系统中的固有特征。
当控制阀上、下游压力之比大于0.528小于1时,通过阀口的气体质量流量不仅取决于阀的结构,而且还取决于阀口上、下游压力,此时通过阀口的气体流动状态为亚音速流动[26]。
由于气动元件部的结构比较复杂,不同于渐缩喷管。
这使流动的音速和亚音速分界点不是压力比为0.528的点。
为解决这个问题,流量计算的新的发展趋势是通过临界压力比b来计算描述气动元件的过流能力,并用这个参数来计算经过比例阀的流量。
因此,比例阀进出气口的流量方程为:111111Q21d vsmkd v ssPc x P bPPc x P bk Pωω-⎧⎪≤≤⎪⎪=⎨⎪⎛⎫⎪≤≤⎪⎪+⎝⎭⎩(1-1)2211221Q21d vmkd vPc x P bPPc x P bk Pωω-⎧⎪≤≤⎪⎪=⎨⎪⎛⎫⎪≤≤⎪⎪+⎝⎭⎩(1-2)其中:Cd—流量系数ω—阀口面积梯度xv—阀芯位移Ps、P—气源压力、大气压力P1、P2—气缸左、右腔压力利用Simulink工具对进气口式进行建模,如图1-1所示,对其子系统封装如图1-2所示。
同理可对出气口进行建模并封装子系统。
2) 压力微分方程根据质量守恒定律,假定工作介质为连续的,储藏到某控制体中去的质量的储藏率应该等于流入的质量流量减去流出的质量流量。
即:()dM d V dV d M M V dt dt dt dtρρρ••-===+∑∑入出 将气体状态方程代入上式并化简可得:1dM dV V dp p dt RT dt k dt ⎛⎫=+ ⎪⎝⎭假定T 1=T 2=T ,忽略温度变化的影响,将气缸两腔参数分别代入上面公式,得:图1-1 阀进口流量方程图1-2 阀进口流量方程封装模块11111()m dxk RTQ P A dP dt dtV -=(1-3)22222()m dx k RTQ P A dP dt dtV +=(1-4)其中:A 1、A 2—气压缸左、右腔面积 V 1、V 2—气缸左、右两腔体积Qm 1、 Qm 2—气缸进出左、右两腔的流量 x —气缸活塞位移用Simulink 对(3)式建模如图1-3所示,子系统封装如图1-5所示。
同理对(4)式进行建模如图1-4所示,子系统封装如图1-6。
图1-3 气缸左腔流量压力方程3) 气缸活塞的力平衡方程根据牛顿第二定律可得到气缸的力平衡方程如下:P 1A 1-P 2A 2 -F f = m 22d dty+K y+ F (1-5)其中:F f —作用在气缸上的摩擦力 F —作用在气缸上的的外力负载m —气缸上运动部件的质量及负载质量总和 K —负载弹簧刚度图1-4 气缸右腔流量压力方程图1-5 气缸1腔流量压力方程封装模块图1-6 气缸2腔流量压力方程封装模块根据力平衡方程(5)式在Simulink中建立模型如图1-7所示,进行子模型封装如图1-8所示。
4)气缸摩擦力模型摩擦力是影响气动伺服控制系统性能的重要因素,摩擦力的大小、方向取决于滑动摩擦副的材料、表面粗糙度、润滑条件、受力大小及温度等因素。
气缸的摩擦力对气动伺服系统的影响最大,特别是气缸低速运动时更为明显,所以研究摩擦力的影响因素对系统的建模至关重要。
气缸摩擦力是非线性的,通常将气缸摩擦力分为动摩擦力和静摩擦力,其中动摩擦力又分为库伦摩擦力和粘性摩擦力。
当气缸在静止时摩擦力较大,而它一旦开始运动时,摩擦力随着速度增加急剧下降,在达到一定速度,即临界速度后又随着速度的上升而增加。
这一摩擦特性产生了气缸在低速运动时的爬行现象,同时影响气动伺服定位系统的性能。
图1-7 气缸力平衡方程图1-8 气缸力平衡方程封装模块当前工程上位置控制系统中应用较为广泛的气缸摩擦力模型是Stribeck摩擦模型,其摩擦力与速度关系曲线如图1-9所示,摩擦力首先随着速度的增加而降低,到一定速度后又随着速度的上升而下降,其公式为:(())sgn()suuu c s cF F F F e u Cuδ⎛⎫- ⎪⎝⎭=+-+其中:Fs—静摩擦力Fc—库仑摩擦力u—活塞速度us—Stribeck分离速度δ—待定系数,介于0.5到2之间Stribeck摩擦模型较好地描述了低速下的摩擦力的行为,用一个衰减指数项体现了负斜率摩擦现象。
但是Stribeck模型没有考虑到摩擦滞后、变化的临界摩擦力等非线性因素带来的影响,在速度穿越零时,摩擦力发生突变,并且突变值较大,在力控制系统中直接反馈到的变量是力,摩擦力的突变会导致反馈力发生突变,进而引发系统高频振荡,不符合实际情况。
实际情况中,摩擦力还具有时间依赖性,即摩擦记忆的特性。
摩擦记忆就是接触表面间相对运动速度发生改变时, 摩擦力滞后一段时间才会发生变化的现象,而LuGue模型较好的考虑了这一方面的因素,加入了摩擦力的记忆特性,避免了因为摩擦力突变而产生的高频振荡现象。
因此本仿真模型中采用LuGue模型,LuGue模型不仅考虑了Stribeck图1-9 气缸Stribeck模型摩擦力与速度关系曲线速度负斜率影响,并且能反映预滑动位移、摩擦滞后、变化的临界摩擦力和粘性滑动等非线性特性,是目前较为完善的一个模型,具有较高的精度。
LuGre 模型将摩擦的接触面看成是在微观下具有随机行为的弹性鬃毛,摩擦力由鬃毛的挠曲产生,其摩擦力模型为:012dzF a z a a v dt=++ (1-6) ()v dzv dt g v =- (1-7) 20()()s v v c s c a g v F F F e⎛⎫- ⎪⎝⎭=+- (1-8)其中:v —摩擦表面的相对速度Z —粘滞状态下相对运动表面间的相对变形量 a 0—移动前的微观变形量z 的刚度 a 1—dz/dt 的动态阻尼 a 2—粘性摩擦系数根据(1-6)、(1-7) (1-8)三个方程表述的摩擦力模型在Simulink 中建模如图1-10所示,然后进行子系统封装。
图1-10 气缸LuGre 模型摩擦力方程由LuGre模型作出气缸在低速时的摩擦力与速度的关系如图1-11所示。
此模型中的摩擦力具有记忆特性,在速度过零点时不会发生突变,而是有一定的滞后,在速度增加到反方向的某一个值时才缓慢的回到零,不会产生高频振荡。
并且摩擦力随速度变化关系也满足Stribeck负效应,符合摩擦力变化趋势,比较适合应用于气压力控制系统仿真模型中。
上面已经对气压力控制系统的4个方程进行了建模,将4个子模型联系起来就可以完成对整个系统的建模。
气压力控制系统的线性化气压力伺服系统为比较复杂的非线性系统,特性也比较复杂,对其进行控制会比较困难,因此对其进行线性化,虽然线性化不能准确的给出实际系统模型,但它对系统的定性分析提供了一种有效的手段。
下面针对系统的数学模型在某一工作点对系统进行线性化处理。
首先对阀的流量方程(1-1)式(1-2)式进行线性化处理,由Sanville流量公式知,阀的流量方程仅是阀芯位移xv和气缸中气体压力P1和P2的函数,在工作点分别对这些变量取一阶偏微分即可得出微分方程的近似线性化方程:1111m m v cQ K x K P=- (2-1)2222m m v cQ K x K P=- (2-2)图1-11 气缸LuGre模型摩擦力与速度关系曲线式中:1m1101110.5281Q|x200.5281dsmvkd ssPc PPKPc Pk Pωω-⎧⎪≤≤⎪∂⎪==⎨∂⎪⎛⎫⎪≤≤⎪⎪+⎝⎭⎩m22011220.5281Q|x200.5281dsmvkdsPc PPKPc Pk Pωω-⎧⎪≤≤⎪∂⎪==⎨∂⎪⎛⎫⎪≤≤⎪⎪+⎝⎭⎩m111QPcK∂=-∂m222QPcK∂=-∂然后对压力微分方程进行线性化处理,对(1-3)式(1-4)式进行拉氏变换得出:()110111(y)mk RTQ P A sP s sV-=从而()1m110111Qs VkRT kP s P A yV=- (2-3)同理()2m220222Qs VkRT kP s P A yV=-- (2-4) 其中10V V Ay=+,20V V Ay=-气缸的力平衡方程:A1P1- A2P2-F-F f= m22d ydt+ K y在摩擦力模型中,有一部分与速度成正比的粘性摩擦力,因此线性化过程中可将摩擦力模型简化为f j pF F B v=+,则力平衡方程变为:A 1P 1- A 2P 2-F -F j = m 22d dt y +B p dtdy +K y 进行拉氏变换,得()()j21122p F F A P s A P s ms y B sy Ky s +--=++ (2-5)将式(2-1) ,(2-2),(2-3) ,(2-4)代入式 (2-5) ,得22210120211221212112212()m m p v c c j kP A kP A kRTA K kRTA K ms B s K sy x V V V V kRTPK kRTP K F F V V ⎡⎤⎛⎫⎛⎫++++=+-⎢⎥ ⎪ ⎪⎝⎭⎝⎭⎣⎦⎛⎫+-+ ⎪⎝⎭可此求得由阀芯位移到气缸活塞位移的传递函数为:()()11221222210120212Y s m m v p kRTA K kRTA K V V X s kP A kP A s ms B s K V V ⎛⎫+ ⎪⎝⎭=⎡⎤⎛⎫++++⎢⎥ ⎪⎝⎭⎣⎦ =11221222210120212m m p kRTA K kRTA K mV mV B kP A kP A K s s s m m mV mV ⎛⎫+ ⎪⎝⎭⎡⎤⎛⎫++++⎢⎥ ⎪⎝⎭⎣⎦ 在力控制系统中,被控制量是力,将输出力由力传感器转换为反馈电压信号与指令电压信号相比较,得到偏差信号,此偏差信号经过控制器输入伺服阀,使伺服阀到气压缸的流量发生变化,从而使输出力向着减小误差的方向变化。