北斗BDG-MF-05型船载终端简介产品说明
- 格式:doc
- 大小:610.50 KB
- 文档页数:7

BDM10系列使用操作指南书写者:安朝日版权归本人所有目录1. 产品型号-------------------------------------------------------------- 第1 页2. 产品型号说明----------------------------------------------------------- 第1 页3. 电流互感器选型--------------------------------------------------------- 第1 页4. 产品功能对照表--------------------------------------------------------- 第2 页5. 产品建议开孔尺寸------------------------------------------------------- 第2 页6. 产品功能详细说明及参考定值设定-------------------------------------------- 第3 页6.1起动时间过长保护------------------------------------ 第3 页6.2断相保护---------------------------------------- 第3 页6.3堵转保护---------------------------------------- 第3 页6.4防爆电机EExe热过载保护(t E时间保护)------------------------ 第4页6.5 零序过流保护-------------------------------------------------------------- 第4页6.6 三相电流不平衡保护-------------------------------------------------------- 第5 页6.7 热过载-------------------------------------------------------------------- 第5 页6.8自动重起动----------------------------------------------------------------- 第6页6.9 欠电流保护----------------------------------------------------------------- 第7 页6.10工艺联锁跳闸-------------------------------------------------------------- 第8 页6 .11工艺联锁合闸---------------------------------------------------- -- 第8页6.12低电压保护---------------------------------------------------------------- 第8 页6.13过电压保护---------------------------------------------------------------- 第9 页6.14欠电流保护---------------------------------------------------------------- 第9 页7. 电流输入方式--------------------------------------------------------- 第10页8. 外置互感器尺寸------------------------------------------------------- 第11 页9. 使用操作------------------------------------------------------------ 第12 页10. 装置接线端子示意图及其端子定义描述-------------------------- 第14 页11. LED数码管显示故障代码以及定值代码 ------------------------- 第22页12. 现场故障案例分析与解决--------------------------------- 第24页13. 4-20mA说明文件----------------------------------- 第28页14. BDM100-M+工艺连锁分合闸调试方法-------------------------- 第28页15. 自动重起动说明------------------------------------- 第28 页1. 产品型号BDM100 系列共分为:BDM100-B、BDM100-S、BDM100-C、BDM100-C+、BDM100-M、BDM100-M+、BDM100-L 共计7 种型号。
http ://www.smujournal.cn第33卷第3期2012年9月上海海事大学学报Journal of Shanghai Maritime UniversityVol.33No.3Sept.2012文章编号:1672-9498(201203-0001-04基于北斗二代系统的船载定位终端应士君,王坤,刘卫,邹绪平(上海海事大学商船学院,上海201306摘要:为确保船舶航行安全,利用北斗二代卫星导航技术,设计船载定位终端.该终端以S3C2440ARM 处理器和Windows CE 6.0嵌入式系统为核心,以外围电路为辅,采用最小二乘算法,实现船舶的导航定位.通过MATLAB 软件对可见卫星数目和水平精度因子进行计算和分析,论证方案的可行性和可靠性,进一步推动北斗船载终端在航行中的应用.关键词:船载定位终端;ARM ;Windows CE 6.0;北斗二代系统中图分类号:U666.134;TP277.2文献标志码:AShipborne positioning terminal based on Beidou-2YING Shijun ,WANG Kun ,LIU Wei ,ZOU Xuping(Merchant Marine College ,Shanghai Maritime Univ.,Shanghai 201306,ChinaAbstract :In order to guarantee the ship navigation safety ,the shipborne positioning terminal was de-signed based on the Beidou-2satellite navigation system.TheS3C2440ARM processor and the Windows CE 6.0embedded system were taken as the core parts of the terminal which is assisted by the peripheral circuit.And the least square algorithm was used to realize the ship navigation and positioning.Then ,the numbers of visible satellites and horizontal dilution of precision were calculated and analyzed by using the MATLAB software.The results show that the design is feasible andreliable ,which can further promote the application of the Beidou shipborne terminal in the ship navigation.Key words :shipborne positioning terminal ;ARM ;Windows CE 6.0;Beidou-2收稿日期:2012-01-09修回日期:2012-05-17基金项目:国家科技支撑计划(2009BAG18B04;国家自然科学基金青年基金(61105097作者简介:应士君(1966—,男,江苏宜兴人,副教授,硕导,博士,研究方向为船舶导航与安全技术,(E-mail sjying@shmtu.edu.cn0引言北斗卫星导航系统(Compass Navigation Satellite System ,CNSS 是我国正在实施、具有自主知识产权的卫星导航定位系统.该系统由空间段、地面段和各类北斗用户组成,集导航、定位、授时功能于一体;分3个阶段进行建设,分别为北斗一代(区域有源双星定位,已完成、北斗二代(区域无源定位,建设中,记为BD-2、全球覆盖阶段.截至目前共有11颗BD-2卫星在轨,具有覆盖中国及周边地区,24h 全天候服务,高强度加密设计,安全、可靠、稳定等特点.随着远洋、内河航运产业发展和船舶通信导航及各类电子控制设备的日益完善,实现对船舶的全方位定位导航,及时掌握船舶在航行中的实际情况,快速了解船舶的动态数据,成为提升船舶管理水平的新标志.[1]因此,基于BD-2的船载定位终端设计,http ://www.smujournal.cn对确保船舶的航行安全具有重要意义.在北斗卫星导航系统的发展前景下,国内主要由神州天鸿、北斗星通、东方联星、华力创通等公司从事北斗接收机研发设计,在船舶监控[1]和海洋渔业[2]上均有应用.然而,此类应用主要建立在北斗一代船载接收机的基础上,市面上现存的BD-2接收机主要是少量的测试机、手持机,而成品民用船载机尚在研发阶段.鉴于此,本文设计基于BD-2的船载定位终端,主要有硬件平台搭建、定位解算算法、软件架构设计等几个方面,通过测试实验验证该方法的可行性.1硬件平台搭建该设计中基于ARM 和Windows CE 6.0(WINCE 6.0的BD-2船载定位终端硬件平台采用模块化设计方法,所有部件尽量采用成熟电子元器件.该系统硬件主要由BD-2导航模块、时钟模块、电源管理模块、数据通信接口和PVT (ARM 解算模块等组成.[3]系统硬件结构见图1.图1系统硬件结构BD-2导航模块主要由射频模块、A /D 采样模块、基带信号处理模块组成.射频模块分为2个通道,其中一个通道专门将B3频点射频信号变频为中频信号,而另一通道则通过切换方式将B1或者L1频点射频信号变频为中频信号.双通道A /D 将模拟中频信号数字化并作为基带信号处理模块信号输入,同时射频模块输出62MHz 参考信号,本地时钟信号作为ADC 的转换时钟,并且输入至基带信号处理模块作为信号跟踪基准时钟.基带信号处理模块完成信号的捕获、跟踪、解调,输出原始观测量.PVT (ARM 解算模块主要由极低功耗的ARM9处理器S3C2440,SDRAM ,NAND Flash 等硬件构成.PVT (ARM 解算模块完成对基带信号处理模块的控制,并将基带信号处理模块得到的观测量提取出来加以解算,得到解算结果,同时对整个系统的运行进行处理.数据通信接口部分设计CAN 总线接口、RS-485接口等,便于与雷达、ECDIS 和AIS 等设备互联,实现综合导航.2定位解算算法流程硬件电路BD-2导航模块设计中,基带信号处理模块主要采用的是北京华力创通科技有限公司的HwaNavchip-1北斗GPS 多频精密导航基带芯片.该芯片可同时接收BD-2的B3和B1频点信号(本文主要是利用B1频点进行导航定位解算,输出原始观测量;具有16bit 的并行数据总线接口,32bit 的ARM 微处理器S3C2440通过该接口可对HwaNav-chip-1进行配置,得到导航电文、集成电路工作状态等信息.通过ARM 开发工具ADS (ARM Developer Suit 对ARM 进行调试,使其解算用户位置、速度、时间等信息.该设计中采用基于伪距定位的最小二乘算法[4-5],定位解算算法流程见图2.图2定位解算算法流程2上海海事大学学报第33卷http ://www.smujournal.cn该算法通过伪距计算用户的位置:第1步初始化用户位置作为地球中心;第2步计算用户到卫星的距离及其信号传输时间;第3步根据地球自转效应修正卫星位置,并将卫星位置更新为以用户为中心的坐标系;第4步根据相关参数进行修正;第5步进行迭代运算;最后计算DOP ,并将ECEF 坐标系转化为CGCS2000坐标系,保存结果.3软件开发平台WINCE 6.0是模块化、可延展、实时性能好、通信功能强大、支持多种CPU 的嵌入式操作系统,与Windows 系列有较好的兼容性,支持WIN 32API ,便于快速开发产品,具有多线程、多任务等特点.[6]因此,该设计选用WINCE 6.0嵌入式操作系统.设计中软件架构主要包括WINCE 6.0系统的定制、移植和定位应用程序的开发.建立基本WINCE 6.0系统平台的一般过程是:设置系统平台;建立操作系统镜像;将平台传输到目标设备;调试系统平台.通过Platform Builder 应用程序可以方便地设置平台,建立操作系统镜像.定制WINCE 6.0的一般步骤见图3.图3定制操作系统的过程在进行WINCE 6.0定位应用程序设计开发时,开发语言采用的是Visual Studio 2008.开发的应用程序首先在模拟器中进行调试,调试成功之后下载到硬件设备中.实验时给出BD-2卫星的串口输出协议,设计定位导航显示界面程序[7],目的是查看船舶当前定位信息.4主要功能设计按照船用接收机软件需求分析,主要功能模块见图4.定位功能用于显示当前船舶的位置及时间信息;导航功能为船舶当前的航线进行导航及设定航迹偏差报警;报警功能对不合法操作及遇险报警.图4功能模块5测试实验及分析5.1串口输出协议分析通过对BD-2串口输出协议的理解,可以更好地提取导航定位信息:$BDGGA ,$BDRMC [8]等.以$BDRMC 语句为例分析串口输出协议:$BDRMC ,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*<13>协议中:<1>为定位时间(UTC ,hhmmss 格式;<2>为定位状态,A 表示有效,V 表示无效;<3>为纬度,ddmm.mmm 格式;<4>为纬度方向,N 或S ;<5>为经度,ddmmm.mmmm 格式;<6>为经度方向,E 或W ;<7>为速度;<8>为速度方向;<9>为当前UTC 日期,ddmmyy 格式;<10>为磁偏角;<11>为磁偏角方向;<12>为定位状态,A 表示有效,V 表示无效;<13>为校验和.5.2部分测试实验界面通过天线采样获得真实的导航定位信息,采样时间为2012年3月14日.以下测试结果只是初步设计要求,目的在于论证方案的可行性.下一步将按照船载定位导航需求,进行相应的应用开发,满足船舶日常航行需求.测试和导航界面见图5.图5测试实验界面5.3VSN 和HDDP本次测试时间段为2012年3月15日至2012年3月16日,共24h ,采样时间间隔为1s ;地点为上海地区;BD-2和GPS 星座使用当天广播星历计算卫星位置;用MATLAB 软件对接收到的数据进行3第3期应士君,等:基于北斗二代系统的船载定位终端http ://www.smujournal.cn分析处理.可见卫星数(Visible Satellite Number ,VSN 见图6.图6可见卫星数水平精度因子(Horizontal Dilution of Precision ,HDOP 描述的是卫星几何形态对平面定位的影响.[9-10]HDOP 分布见图7.图7HDOP 分布由图6和7归纳出的信息见表1.6结束语主要论证基于BD-2的船载定位终端设计的可表1BD-2与GPS 的VSN 和HDOP 值对照系统名称VSN (95%HDOP (95%最大值最小值平均值最大值最小值平均值BD-2745.137435.41.52.86022GPS1157.459672.60.71.14364行性和可靠性,在系统应用扩展方面未给出具体方案.综上得到:(1在ARM 和WINCE 6.0基础上设计基于BD-2的船载定位终端的思路可行、方法正确,可推动北斗卫星导航系统在海洋领域的应用,促进海洋经济的发展.(2受BD-2卫星在轨数目的客观限制,目前其VSN 低于GPS.尽管VSN 少,但可以保证我国及少数周边地区的定位导航.(3当前阶段BD-2船载定位终端的HDOP 保持在1.5 5.4之间,与GPS 的HDOP 值0.7 2.6相比较大,这是由当前阶段5颗GEO 卫星、4颗MEO 卫星及3颗IGSO 卫星的几何构型所决定的.根据误差(1σ=1ˑRMS 值ˑDOP 值[8],此时RMS 值为2m (统计值,则误差(1σ的范围在3.0 10.8m.(4本设计在电子器件选择、定位算法、导航软件界面丰富和软件扩展方面仍有不足之处,有待进一步提高.参考文献:[1]李晶,刘建,卢红洋.基于北斗卫星导航系统的船舶监控中心的设计与实现[J ].数字通信世界,2011(S1:68-71.[2]胡刚,马昕,范秋燕.北斗卫星系统在海洋渔业上的应用[J ].渔业现代化,2010,37(1:60-62.[3]应士君,邹绪平,刘卫,等.基于北斗二代系统的船用导航仪硬件设计及关键算法研究[J ].科学技术与工程,2012,12(9:223.[4]彭丛林.北斗导航系统定位算法仿真研究[D ].成都:西南交通大学,2009.[5]武英洁.船用北斗/GPS 联合导航终端的研究[D ].大连:大连海事大学,2010.[6]华清远见嵌入式培训中心.Windows CE 嵌入式开发标准教程[M ].北京:人民邮电出版社,2010:5-8.[7]汪兵.Windows CE 嵌入式高级编程及其实例详解[M ].北京:中国水利水电出版社,2008:360-377.[8]王艳军,王晓峰.AIS 和北斗终端组合在船舶动态监控中的应用[J ].上海海事大学学报,2011,32(4:17-21.[9]让-马利佐格.GPS 卫星导航基础[M ].北京:航空工业出版社,2011:80-81.[10]杨元喜,李金龙,徐君毅,等.中国北斗卫星导航系统对全球PNT 用户的贡献[J ].科学通报,2011,56(21:1734-1740.(编辑贾裙平4上海海事大学学报第33卷。
船载BDS接收机设备性能标准1 引言1.1 北斗卫星导航系统(BDS)是中国自主建设、独立运行,并与世界其他卫星导航系统兼容共用的全球卫星导航系统。
北斗卫星导航系统由空间星座、地面控制和用户终端三大部分组成。
空间星座部分由5颗地球静止轨道(GEO)卫星、27颗中圆地球轨道(MEO)卫星和3颗倾斜地球同步轨道(IGSO)卫星组成。
其中,GEO卫星分别定点于东经58.75度、80度、110.5度、140度和160度;MEO卫星轨道高度21500千米,轨道倾角55度,均匀分布在3个轨道面上;IGSO卫星轨道高度36000千米,均匀分布在3个倾斜同步轨道面上,轨道倾角55度,3颗IGSO卫星星下点轨迹重合,交叉点经度为东经118度。
这种星座空间几何构型可确保全球用户至少可见4颗卫星,用户定位精度因子(PDOP)≤6。
每颗BDS卫星在L波段发射公开服务信号B1I,载波频率为1561.098 MHz。
B1I信号发送能提供公开服务的测距码,导航电文信息加载在测距码上。
BDS采用CDMA识别卫星。
1.2 BDS提供定位、导航和授时服务,对直接使用者免费。
BDS接收机能够接收和处理BDS的公开服务信号。
1.3 在航速不超过70节的船上用于航行目的的BDS接收机设备除应满足IMOA.694(17)决议规定的一般要求外1,还应符合下文“BDS接收机设备的性能标准”规定的最低性能要求。
1.4 本标准仅包括定位、确定对地航向(COG)、对地航速(SOG)和授时的基本要求,用于导航目的或作为其他功能的输入。
本标准不包括设备中可能有的其他计算工具,也不包括可从BDS接收机获得输入的任何其他系统的要求。
1 参见IEC出版物60945。
2 BDS接收机设备2.1 本性能标准中使用的术语“BDS接收机设备”包括接收机正确使用正常功能所必需的所有部件和元件。
BDS接收机设备至少应包括下列部件:.1 能接收BDS信号的天线;.2 BDS接收机与处理器;.3 计算并输出纬度/经度位置数据的软件工具;.4 数据输出控制接口;.5 位置显示,以及在需要时的其他输出形式。
道路运输车辆卫星定位系统车载终端用户手册V1.0目录V1.0 (1)目录 (1)产品概述 (3)技术指标 (4)功能详细介绍 (6)3.1查询功能 (6)3.1.1位置查询(支持SMS模式) (6)3.1.2参数状态查询(支持SMS模式) (6)3.1.3定时回传参数查询(支持SMS模式) (6)3.1.4查询车辆历史轨迹 (6)3.1.5查询车辆参数 (6)3.1.6版本查询(支持SMS模式) (6)3.2设置 (6)3.2.1定时回传位置信息的时间间隔设置(支持SMS模式) (6)3.2.2超速报警门阀设置(支持SMS模式) (7)3.2.3停车超时报警门阀设置(支持SMS模式) (7)3.2.4电子围栏设置(支持SMS模式) (7)3.2.5多边形电子围栏设置(支持SMS模式) (7)3.2.6 IP、端口及APN设置(支持SMS模式) (7)3.2.7远程设置GPRS通讯方式(支持SMS模式) (7)3.2.8远程设置本机号(支持SMS模式) (7)3.2.9远程下载集团电话号码(支持SMS模式) (7)3.2.10通讯限制(支持SMS模式) (7)3.2.11远程修改短信中心号码(支持SMS模式) (8)3.2.12初始化里程(支持SMS模式) (8)3.2.13心跳时间设置(支持SMS模式) (8)3.2.14线路规划设置 (8)3.2.15车速传感器传递系数设置(支持SMS模式) (8)3.2.16车辆参数设置 (8)3.2.17自定义检测口配置 (8)3.3、远程控制 (8)3.3.1远程重启(支持SMS模式) (8)3.3.2远程控制油路(支持SMS模式) (9)3.3.3收发调度信息(支持SMS模式) (9)3.3.4远程监听(支持SMS模式) (9)3.3.5支持远程软件升级(支持SMS模式) (9)3.4报警 (9)3.4.1超速报警 (9)3.4.2停车超时报警 (9)3.4.3 GPS天线开路短路报警 (10)3.4.4终端主电源断电报警 (10)3.4.5电源过高/低报警 (10)3.4.6自定义报警(高低传感器报警) (10)3.4.7抢劫/求助报警 (10)3.4.8进出围栏报警 (10)3.4.9疲劳驾驶报警 (10)3.5其它 (10)3.5.1图像采集 (10)3.5.2定时拍照 (11)3.5.3触发拍照 (11)3.5.4里程统计 (11)3.5.5盲区补传 (11)3.5.6打印功能 (11)3.5.7行驶记录仪功能 (11)3.5.8、读取事故疑点数据 (11)四、外带接口和扩展功能 (11)4.1 带USB host接口 (11)4.2 DB9串口连接PC电脑 (12)4.3 无线红外接口 (12)4.4 带IC卡接口 (12)4.5 带速度传感器接口 (12)五、使用说明 (12)5.2主机参数设置 (13)5.2.1 菜单结构示意图: (14)5.2.2 菜单设置 (15)七安装及调试流程 (17)七包装清单 (18)八注意事项 (18)产品概述道路运输车辆卫星定位系统车载终端、符合汽车行驶记录仪国标GB/T GBT19056-2003和交通运输部JT/T 794-2011《道路运输车辆卫星定位系统车载终端技术要求》、JT/T808-2011《道路运输车辆卫星定位系统车载终端通讯协议及数据格式》标准。
北斗船载导航终端-LC369双模一体机规格书一、产品简介北斗船载导航终端-LC369一体机内部集成RDSS模块、RNSS B1/GPS L1模块、天线等,该模块集成度高、功耗低、可完整实现RDSS定位、短报文通信功能,并且实时接收RDSS、RNSS B1/GPS L1卫星导航信号。
北斗船载导航终端-LC369一体机体积小巧、功耗低,连接简单、操作方便,非常适应于船舰导航等大规模应用。
二、功能特点●全天候的定位导航和双向报文通信功能;●支持BD/GPS双模工作,保证定位结果准确;●集成化程度高,RDSS模块、RNSS模块、GPS模块及天线融于一体;●采用防水设计,可在室外可靠工作;●提供支架安装方式,便于用户安装使用。
三、电源接口四、航空头芯线接口定义五、SIM卡接口用户机要正常使用,必须插入专用的SIM卡。
SIM卡主要参数:●卡号:用户卡的唯一识别号码;●入站频度:用户机在两次发送的最小时间间隔;单位秒;●最大发送电文BIT数:用户机能够一次发送的最大信息BIT数;如果用户电文超过最大BIT数,多余的BIT将会被丢弃;注意:插卡时必须确认用户机已关机(将电缆从用户机取下)。
六、系统功能1.BD双向定位●通过用户接口发送命令实现双向定位功能;双向定位需要对卫星发送入站信号,此命令占用用户卡的频度;在本次发送后一个频度时间内的其他入站信号将不被处理;●如果信号良好,用户机将返回当前用户机所在的位置的经度、维度和高程;2.RNSS/GPS定位●可接受RNSS卫星信号及GPS信号实现实时导航、定位、定时等功能;●具有RNSS系统、GPS系统和GPS/RNSS兼容定位等三种定位方式;3.短报文通信●本机可以通过用户接口发送命令实现短报文通信功能;需要对卫星发送入站信号,此命令占用用户卡的频度;在本次发送后一个频度时间内的其他入站信号将不被处理;●发送的电文BIT数不能超过用户机能够一次发送的最大信息BIT数;如果用户电文超过最大BIT数,多余的BIT将会被丢弃;4.位置自动上报●本机可以通过设置上报参数实现用户位置向控制中心上报本机所在的位置;将几个定位位置点打包成短报文,通过短报文向中心发送本机位置;●位置自动上报由用户机主机自动进行,只需要通过配置即可;备注:位置自动上报占用RDSS服务频度。
北斗一号一体式船载型用户机
1.1产品概述
北斗一号一体式船载型用户机是北京星地恒通信息科技有限公司在北斗一号一体式车载型用户机的基础上,为了适应高盐雾、高腐蚀海上使用环境而研制的产品,用户可利用该产品实现北斗定位、短信息通信功能。
1.2产品实物图片
北斗一号一体式船载型用户机由主机、电源数据电缆组成。
连接线缆有以下方式(显控接口和串口接口,参见图1),可根据用户需求进行选配。
图1 整机组成图
该产品通过数据电源电缆,连接到用户供电电源,同时通过数据电源电缆,与用户终端之间实现串口数据传输。
该产品的主要特点如下:
➢该产品具有同时完成北斗定位和GPS定位两种工作模式;
➢可同时接收3颗北斗卫星6个波束的信号;
➢IC卡拆卸安装简便快捷;
➢环境适应能力满足海上高盐雾、高腐蚀环境;
➢产品数据电源电缆采用底出口方式,防水性好。
1.3产品技术指标
1.3.1功能指标
➢定位功能
定位精度:20米(1σ)有标校站地区) 100米(1σ)(无标校站地区)➢短信息通信功能
1.3.2结构尺寸及重量
整机结构尺寸示意图
➢主机尺寸:φ158mm×90mm
➢整机重量:≤1.2Kg(不含电缆、附件等) 1.3.4电源
➢外部直流供电,电压范围:12~32V 1.4交货清单。

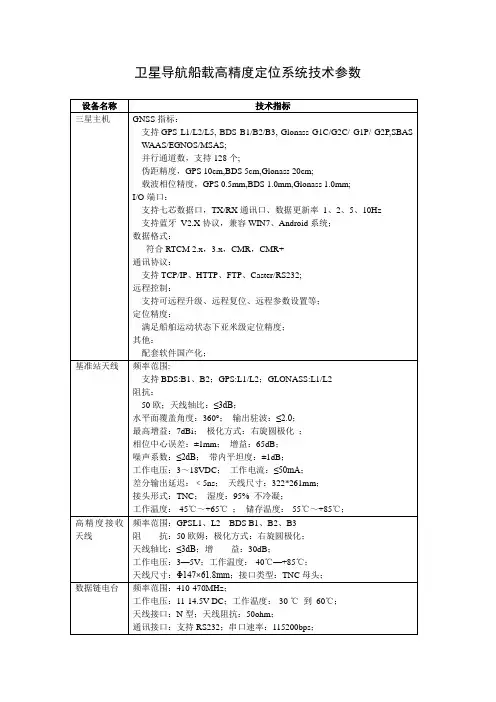
北斗卫星导航船载终端检修规程船载北斗卫星导航系统终端技术由以下单元组成:定位通信单元:由收发天线、收发信道、北斗卫星定位和短报文通信、兼容GPS 的卫星定位、信息采集和处理、I/O接口及协议、电源等功能模块组成。
显控单元:由包含中央处理器和应用程序及存储器的主板、各功能和信息的控制和处理、I/O接口及协议、显示屏、键盘及紧急报警键、电源等功能模块组成。
安装配件:包括电缆、紧固件等。
一、外观检修方法(1)机壳1、标识:应有厂名、产品型号或名称、产品序列号和安全距离确认。
2、外形:不应有凹坑、裂纹、锈蚀、毛刺等显明显缺陷。
3、涂漆:应均匀、平滑,不应有脱落、划痕、流痕等明显缺陷。
4、装配:应无松动或漏装坚固件。
(2)旋(按)钮、开关操作应灵活,无松动和打滑,功能开关换档明确,定位准。
(3)插座、插孔应无失灵或功能不稳。
(4)指示灯、显示器应能正常工作。
二、功能检修方法(1)定位功能要求1、能利用北斗卫星导航系统确定船舶位置,并可兼容GPS的卫星定位。
2、可以通过北斗指令控制的方式要求定位通信单元进行北斗定位,也可以通过显控单元用手动方式向定位通信单元发送北斗定位指令。
3、能够按照规定的时间要求,或者航速、航向变化情况,进行动态的定位数据采集。
4、能够按照设定的时间间隔、距离间隔或者时刻点,自动发送位置信息或位置信息包。
5、按照先进先出原则,具有动态存储最近时间段之内全部定位信息的功能。
6、能给出定位状态信息,当不能定位时,根据设定给出视觉信息和提示音信息。
(2)通报文通信功能要求1、具有短报文预存、编辑、输入、存储、发送、接收和显示的功能。
2、在接收到短报文信息后,能自动发出接收到短报文信息的回执。
3、能够利用北斗卫星导航系统进行包括汉字、数字和英文等内容的短报文通信。
4、短报文中的汉字采用GB2312编码的一级字库,英文采用ASCII码编码。
5、短报文通信对象包括:北斗运营服务中心、其他渔业船舶船载北斗终端、北斗用户机、移动通信网络的手持电话等。

图1船载监管终端船载监管终端硬件设计船载监管终端硬件部分如图2所示,主要包括电源管理模模块、防拆模块、天线模块、蓝牙模块、RNSS报警模块。
图2船载监管终端硬件框图电源管理模块集成了太阳能充电电路,锂电池充放电电路、DC/AC电路。
终端首先通过太阳能电池板将太阳能转化为电能,然后通过充电电路对锂电池进行充电,锂电池再对主电路进行供电。
RSMC模块集成了射频芯片、基带芯片、PA电路以及LNA电路,外接SIM卡和无源天线即可实现短报文通信、定位和位置报告功能,RSMC服务通过北斗三号标称空间星座中GEO卫星的L频段和S频段信号提供。
RSMC模块发射信号在L频段的Lf1(1614.26MHz)、Lf2(1618.34MHz),采用直接序列扩频(DSSS)、BPSK调制。
模块接收信号在S频段483.5~2500MHz,包括导频支路S2C_p和电文支路S2C_d 均采用DSSS、BPSK调制,RSMC模块框图如图3所示。
图3RSMC模块框图防拆模块集成了干簧管控制电路,在遭到非法拆卸时可以将终端断电。
天线模块用于与卫星信号的对接,实现卫星信号的接收和发射,本文采用陶瓷天线,该天线的优点是成本低、体积较小。
蓝牙模块是整个设备的核心控制单元,考虑到渔船在外作业时间较长,且小型“三无”船舶设备配备不充分,因此低功耗设计对保证整个系统的正常运行至关重要。
休眠模式下功耗达模块输出的GGA定位语句得到终端的位置信息,通过电量采集模块得到供电系统的电量信息后,将这些信息数据帧上报给信息服务平台。
数据协议处理模块:终端嵌入式软件对RNSS输出定位语句进行解析得到终端的定位信息,将定位信息数据转交给终端位置及状态RSMC定时上报模块。
低功耗蓝牙数据处理模块:终端嵌入式软件程序得到上位出,若定时器溢出,则接收RSMC输出的定位信息、电量和检测终端拆卸信号并将其组帧打包,最后再将打包的帧数据包通过RSMC发送至服务平台。
图5嵌入式软件流程框图图4嵌入式软件框图图6户外测试场景表1户外测试结果图7为微波暗室测试场景,将船载监管终端接入暗室测试系统,测试项目为:RSMC失锁重捕时间、首次捕获时间。
海上船舶监控管理系统一、用户需求通过舰艇中的北斗终端机实时传输经纬度坐标,依托电子海图实时展现出舰艇所在方位,历史航迹等信息;硬件要求总计20艘舰艇,每艘舰艇根据实际情况安装北斗终端机;对每艘舰艇进行实际调研,制定改装方案;定位模块、设备需要高可靠性,北斗长时间自动裕兴,无需人为干预,能够应对海上恶劣环境;软件要求基础电子海图;海图分层,显示部队舰艇、地方船只;在海图中实时显示出舰艇所在位置;在海图中显示出舰艇历史航迹;二、系统设计系统结构系统组成 1.北斗指挥机北斗集团式指挥机是为各级指挥机关提供其下属舰船定位、授时及短报文信息,完成信息的管理、监控、显示、分析、存储及查询,并向下属用户发送命令电文,实施指挥控制的高端北斗系统,该系统可构建多级指挥监控体系;图 主机外观图 天线外观主要功能代码指挥;为部集团用户、指挥车辆及人员提供代码指挥与管控功能; 标绘能力;提供自动、手动标绘能力;位置监控;能够监收部队所辖北斗用户终端位置和短报文信息; 态势显示;提供基于电子地图的下属位置和状态等态势显示;用户终北斗卫星/GPS 卫船载终端船载终端用户终数据库服务应用服务器北斗指挥图 1 船舶监控管理系统结构示意应急通信;为作战部队提供基于北斗短报文的基本应急通信保障手段;具有初始化及自检能力;能够通过软件进行故障检测,出现故障硬件能够进行报警;具有对服务器授时能力,并能够提供时间同步服务;主要技术指标RDSS技术参数1.接收链路主要技术参数接收频点:±;接收通道:10;接收灵敏度:误码率小于1×10E-5,前端低噪放噪声系数小于;2.发射链路主要技术参数发射频点:±;发射功率EIRP:6dBW~19dBW仰角10°~ 90°;载波抑制:优于-30dB;BPSK调制相位误差:<±3°;3.其它技术参数双向零值:1ms±10ns,方差≤10ns1σ;定位成功率:99%有线测试;通信成功率:99%有线测试;最高发射频度:1秒取决于RDSS_IC卡或RDSS_IC芯片; RNSS技术参数1.接收通道数:BD2 B1:12;BD2 B3:8;2.接收灵敏度:-130dBm前端低噪放噪声系数小于;3.开机定位时间:冷启动首次定位时间:≤45s;热启动平均首次定位时间:≤20s;4.失锁重定位时间:≤2s失锁时间≤10s;5.水平定位精度:≤8m1σ;6.垂直定位精度:≤10m1σ;7.水平测速精度:≤s;8.垂直测速精度:≤s;9.授时精度:100ns;环境条件工作温度: -20℃ ~ +55℃;贮存温度: -40℃ ~ +70℃;振动~200Hz;冲击 15g/s;湿热 95%35℃;电磁兼容性,满足GJB151A-97陆军五项要求;2.船载终端北斗船载终端是立足于我国北斗卫星导航定位系统,支持北斗短报文通信,兼容北斗和GPS定位,实现了对多个卫星导航系统的兼容及综合利用,在产品的可靠性、集成度方面取得突破性进展,为船舶提供导航、定位、监控、通信等丰富功能;l产品特点和优势大屏幕彩色电子海图;采用北斗、GPS双模定位导航,搜索卫星速度快;一键式紧急报警;支持船舶之间、船舶与手机用户之间互发短信;可扩展支持AIS船舶防碰撞功能产品稳定可靠,防盐雾、防浸水、耐腐蚀、耐湿热,完全适合于海洋、江河应用;2主要功能导航:彩色大屏幕电子海图导航;定位:采用北斗和GPS双模定位,支持自动及手动位置报告,并可远程调取船位;短信:可实现船舶之间,船岸之间中英文短信互通;紧急报警:提供遇险紧急情况下的一键报警;区域报警:可设置100个以内的区域围栏,当船舶违反区域规则时,自动向船上人员发出声光报警提示,同时向所属的管理部门发出区域报警信息;进出港报告:船舶进出港时,可按下进出港报告按键,向所属管理部门报告进出港信息;信息服务功能:提供台风、海浪、潮汐等渔业作业相关信息;船舶防碰撞报警选配AIS:船舶相互靠近时,可自动发出避让报警,提示船上人员进行避让;3主要技术指标显控屏幕:8英寸彩色屏,800600像素海图比例尺:1:1500——1:0外壳防护等级:IP66卫星首次捕获时间:BD1≤2S BD2&GPS≤60S卫星失锁再捕时间:BD1≤1S BD2&GPS≤2S定位精度:BD1≤20米BD2&GPS≤10米额定工作电压:直流24V峰值功耗:40W 待机功耗:4W最大发射功率:10W相对湿度:90%~95%工作温度:–25℃~70℃3.数据库服务器接收存储管理舰船定位信息、短信信息以及其他信息,供业务模块信息加载、查询、统计使用;4.应用服务器对接收到的卫星定位信息、状态信息以及其他信息进行处理,加载业务功能模块;5.用户信息显示终端以海图为背景,显示各舰船位置、航迹、状态;6.网络通信设备中心局域网信息交换;系统功能船舶监控管理系统是针对船舶航行监控管理的专业平台;系统针对海上行动通讯中断情况下,通过北斗船舶终端采集船舶运行数据,利用北斗卫星定位与短报文通信功能;可在普通移动通信网络盲区,实现对船只精确定位、动态跟踪、过程控制和指挥调度管理,以最快的速度响应舰船的请求;协助管理部门掌握舰船运行情况,提供紧急求助、快速施救和事故调查,推动舰船管理监控一体化信息平台的建设;1.舰船行动态势显示和监控2.通讯指挥和调度3.定位导航4.报警信息及处理5.短信报警6.航迹回放三、经费预算。
2017年第6期 总第170期DOI :10.19423 / ki.31-1561 / u.2017.06.097船载北斗卫星导航系统(BDS)接收设备性能标准林德辉(中国船舶及海洋工程设计研究院 上海200011)收稿日期:2017-11-09作者简介:林德辉(1941-),男,研究员。
研究方向:船舶电气标准(含规则、规范)。
1 GPS 与BDS全球定位系统(Global Positioning System,GPS)由美国于1970 年建设,其前身是一套专为美军研制的定位系统,出于军用考量,为防止敌方通过定位信号截获美军位置,定位系统被设定为单向传输(即 GPS 接收机只接受卫星信号,而不向外发射信号),这一特性也为 GPS 面向民用领域奠定了基础[1]。
打开 GPS,地球上空的卫星在几分钟之内就会锁定你的位置,并告诉你行进的速度、所处位置的海拔高度……。
现在,世界上可以提供精确定位的全球导航系统共有四种:美国的 GPS、俄罗斯的格洛纳斯卫星导航系统(Global Navigation Satellite System,GLONASS)、欧盟的伽利略卫星导航系统(Galileo Satellite Navigation System)和中国的北斗卫星导航系统(Beidou Satellite Navigation System,BDS)。
目前美国的 GPS 最为成熟,覆盖面也最广。
GPS 由空间、地面监控和用户三部分组成(参见图1):(1)空间部分,由24 颗GPS 卫星(包括 21 颗工作卫星和 3 颗备用卫星)组成;(2)地面监控部分,由 1 个主控站、3 个注入站和5 个监控站组成;(3)用户部分,即 GPS 接收机,主要作用是从GPS 卫星接收信号,并利用传来的信号计算用户的三维位置及时间[1]。
24 颗卫星均匀分布在 6 个轨道平面上(即每个平面上 4 颗卫星),各个轨道面均设定为特定的角度。
GPS/北斗定位模块使用说明书文档版本:V1.2目录1.产品介绍 (3)1.1产品概述 (3)1.2功能特点 (3)1.3设备技术参数 (3)1.4产品选型 (3)2.设备使用说明 (4)2.1设备安装前检查 (4)2.2接口定义 (4)3.配置软件安装及使用 (5)3.1软件选择 (5)4.通信协议 (6)4.1通讯基本参数 (6)4.2数据帧格式定义 (6)4.3寄存器地址 (7)4.4通讯协议示例以及解释 (8)4.4.1读取设备地址0x01的定位状态 (8)4.4.2读取设备地址0x01的经度 (8)4.4.3修改地址 (9)5.联系方式 (10)6.文档历史 (10)附录:壳体尺寸 (11)1.产品介绍1.1产品概述我公司研发生产的GPS/北斗定位模块,是一款具有GPS定位和北斗定位的双模定位终端,可以快速、有效、精确定位位置。
GPS/北斗定位模块内含双模定位芯片,可快速定位位置,并且将定位信息以RS232/485接口和ModBus协议的方式提供给用户使用,并可以通过PC 机设置软件或串口命令轻松控制,使用方便快捷。
1.2功能特点同时支持GPS定位和北斗定位(北斗二号和北斗三号1-63号全部卫星)采用WGS84世界大地坐标系,精准定位经纬度信息可实时读取对地速度、对地航向、海拔高度等信息串口波特率自定义,支持1200~115200bps模块串口波特率等参数可通过PC机或串口命令配置RS232/485带TVS、过流等保护提供天线状态诊断,提供天线开路、短路等状态信息1.3设备技术参数供电DC7~30V功耗0.348W使用环境工作温度-20℃~+60℃,0%RH~95%RH非结露通信接口RS232/485接口可选;通信波特率:1200~115200可设天线接口接我公司提供的GPS+北斗双频天线定位精度 2.5m(CEP50)海拔高度典型精度:±10m对地速度<0.36km/h(1σ)1.4产品选型RS-公司代号GPSBDS-GPS北斗定位模块N01-RS485(ModBus-RTU协议)N02-RS232(标准RS232-DB9接口)1GPS北斗定位模块外壳2.设备使用说明2.1设备安装前检查设备清单■GPS北斗定位模块1台■产品合格证、保修卡等■GPS+北斗双频天线安装尺寸:Φ2.5mm88mm2.2接口定义序号标识说明1DC10-30V电源输入设备供电10-30VDC宽压供电2Ant北斗+GPS双频天线3通信设备485通信灯4运行设备运行灯5电源正电源输出正6电源负电源输出负7485A通信:485-A8485B通信:485-B注:通信灯在设备485通信时亮0.1s,设备运行灯正常工作(定位成功)时亮0.5s,熄灭0.5s,异常(未定位成功)时亮0.1s,熄灭0.9s,且模块只需要一端供电就可以正常工作,另一端电源是为后级供电而准备,如不对后级进行供电,可悬空。
版本号:202308501010104北斗三号遥测终端机RTU使用说明书微信公众号第一章产品概述 (4)1.1概述 (4)1.2产品特点 (4)第二章产品功能 (5)第三章技术参数 (6)3.1产品外观 (6)3.2技术参数 (7)第四章参数设置 (9)4.1物理接口 (9)4.2软件接口 (9)4.3使用说明 (10)版权声明:本使用说明书包含的所有内容均受版权法的保护,未经唐山蓝迪通信科技有限公司的书面授权,任何组织和个人不得以任何形式或手段对整个说明书和部分内容进行复制和转载,并不得以任何形式传播。
商标声明:为唐山蓝迪通信科技有限公的注册商标。
本文档提及的其他所有商标或注册商标,由拥有该商标的机构所有。
注意:由于产品版本升级或其他原因,本文档内容会不定期进行更新。
除非另有约定,本文档仅作为使用指导,本文档中的所有陈述、信息和建议不构成任何明示或暗示的担保。
公司声明:本说明书最终解释权由蓝迪通信科技公司负责。
1.1概述北斗三号遥测终端机RTU内部集成北斗三号RDSS模块、BDS B1/GPSL1模块(选配)、天线等,该一体机集成度高、功耗低、可完整实现短报文通信,并且实时接收BDS B1/GPS L1卫星导航定位信号(选配)。
北斗三号遥测终端机RTU体积小巧、功耗低,连接简单、操作方便,非常适应于山洪预警、水库水雨情监测、河流水文监测、地质环境监测、野外数据传输、森林防火、无人区工控指令发送等领域,为暴雨洪水预警和抗洪抢险提供及时准确的水文测报信息,为防汛关键期的预警工作提供坚实保障。
1.2产品特点●通过水利行业权威检测。
●北斗+4G双信道自由切换。
●防潮防盐雾防紫外线。
●采集雨量、水位、流量、风速、风向、温湿度等多种传感器。
·采集多种仪表、传感器等水利相关设备;·具备全天候的定位导航(选配)、单向北斗三号报文通信功能;·支持BD/GPS双模工作,提供更加准确可靠的定位结果(选配);·集成化程度高,RDSS模块、RNSS模块(选配)及天线于一体,通过电源线供电,串口线调用指令进行数据发送及位置上报(选配);·采用防水设计,可在室外可靠工作;·提供支架安装方式,便于用户安装使用;·待机功耗12V@120mA;·支持15KV ESD保护;·串口输出232或485;·平均功耗<1.5W;·通信成功率≥95%;·RDSS接收通道数,最大14通道。
基于北斗卫星通信系统的船载终端串口通信作者:李宏豆,杜美净,崔冬睿来源:《无线互联科技》2023年第20期摘要:北斗船载终端可提供船舶定位报告、北斗短报文通信、应急报警、船舶沉没预警等多种功能。
该系统可以在落入水中后准确地控制释放深度,可以对船只进行导航和定位,可以通过该系统对船只进行定时报告,从而达到对船只的位置进行预警的目的。
装备了北斗卫星的船只,不但能够增强船只与岸边之间信息交流的实时性与客观性,为船只的航行管理提供有力的技术支持,还能够在恶劣的天气、复杂的航道条件下,对船只的位置进行实时监控,从而获得准确的航行信息。
文章主要研究了船载终端系统的主要功能,串口通信的关键技术以及相关的数据处理,从而提高系统的定位精度,并克服了没有基站的问题,提高了系统的可靠性,扩大了信号的覆盖范围。
关键词:北斗卫星通信系统;船载终端;串口通信中图分类号:TN927 文献标志码:A0引言北斗卫星系统是我国自主研发的一种自主导航系统,它拥有自己的自主知识产权,不受任何国家的影响,可以实现全球巡逻的卫星系统。
北斗卫星系统的功能很多,不仅可以免费提供卫星定位,还可以免费提供开放服务,对我国的海事事业作出了重大贡献。
航标系统就是从这里诞生的,它也因此成了海上交通安全保障体系的重要组成部分。
在海上航行时,若能见度很低时,航标体系会通过不停地闪烁灯光、改变灯色等行为,来提醒附近的船只,避免发生危险。
综上所述,对航标进行有效的监控和精准管理,不仅可以让航标变得更加准确,还可以保证航船在行驶过程中的安全。
1北斗卫星通信系统船载终端1.1船载终端系统简介北斗卫星通信船载终端是将中国卫通的“中寰无限”平台作为基础,整合了北斗卫星、世广卫星、 GPS等多项资源,实现了对车辆、船舶等移动对象的监控、指挥、防盗、导航等多项功能[1]。
该系统可以接收来自渔业管理机构的气象、海洋情况和灾害预报;可以为渔船提供精确定位和相关状态;可以记录渔船的航行轨迹及发生的各种情况;还可以配置油量传感器,检测油箱油量,并上报可续航船里程。
1BDG-MF-05型船载终端简介
BDG-MF-05型北斗海洋渔业船载终端(以下简称船载终端),是北斗星通卫星导航技术有限公司(以下简称北斗星通)根据多年对北斗GPS双模用户机在海洋渔业行业的应用的积累,提出的集稳压电源模块(选配)、显控模块和北斗船用定位通信模块。
其中北斗船用定位通信模块是集直流稳压、北斗、GPS等一体的双模北斗用户机,它安装在海上作业的船舶上,能适应海上,船舶上的环境和应用需求。
船载终端由显控模块、北斗船用定位通信模块、连接线及有关安装辅件等部件组成。
其中:显控模块、电源模块为舱内设备,北斗船用定位通信模块、连接线及有关安装辅件为舱外设备。
根据具体渔船的不同可以选配安装专用稳压电源模块。
2功能描述
2.1 船位监控功能
船载终端内置GPS和北斗一号定位设备,具备自动定位功能,通过简单操作,将当前时间、经度、纬度、航向和航速等数据显示在终端显示模块上;能接受远程定位激活指令,并立即通过卫星将当前船位、航行动态自动传送给发令方;能够定时将本船船位报自动传送给各运营中心,并且报告时间、频度、开启和关闭都能通过卫星下行的控制指令随时设置和变更。
2.2 进、出港报告功能
提供渔船用户在船只出港和入港时向渔业主管部门的快速报告功能。
2.3 紧急报警功能
当渔船发生紧急情况请求援助时,可按下显控模块“紧急”按钮并持续3秒,显控模块自动发出紧急报警信息到运营中心,
2.4 电源状态报和通、断电告警功能
当船载终端被人为或非人为切断外接电源时,定位通信模块能自动将电源切换到内置的电池,该电池须可继续正常工作8小时以上;同时在掉电瞬间向运营中心发出断电告警;当外接电源被重新接通时,终端能自动向运营中心发送通电报告。
2.5 区域预警
区域预警及报警:能够存储100个以上的多边形、矩形及圆形区域数据及其这些区域的预警距离。
2.6 拆卸报警
该功能支持防止随意拆卸和盗窃报警,收到外部电子铅封的拆卸信号,生成拆卸报警信息,并携带当前的船位信息以及供电状态、电池电量等信息通过北斗一号通信链路通过北斗运营中心发至用户。
2.7 文字通信功能
使得船载终端终端能够实现船岸、船船的文字信息互通。
✧发送输入信息和内置短语
✧渔船与作业渔船之间通信
✧渔船与运营中心之间
✧渔船与渔政船之间
✧渔船与手机之间
2.8 基本输入输出、显示功能
✧显示模块具备比较完善的显示功能和面板操作功能,包括文字和图形的
显示,以及中英文文字的输入。
✧为方便在白天强光线及夜间黑暗条件下使用,灰度液晶显示屏和操作面
板均配备背景灯,且在终端操作面板上有调节背景光强弱按钮。
✧文字输入:考虑到使用者的文化背景差异较大的限制,显示模块的输入
方式采用简单和容易操作的常用的拼音输入法。
3产品性能指标
3.1 通信性能指标
✧开机首捕时间:≤2s;
✧失锁重捕时间:≤300ms;
✧最高接收灵敏度:-162.6 dBW(G/T=23dB/K);
✧发射功率:≤20瓦;
✧定位精度:近海20米,外海100米。
✧定位成功率:≥99.9%;
✧平均无故障工作时间:≥5000小时;
✧平均维修时间:≤0.5小时;
✧观测卫星仰角:20°~90゜方位角:0°~360゜;
✧通信能力:短报文通信,41个汉字/次;
✧通信频度:北斗用户卡控制。
3.2 管理性能指标
✧保存认证通过的远程北斗用户机号个数:8个。
✧保存组地址个数:16个。
✧外电断开后,自动切换内电池供电时间延迟≤60秒。
✧检测内置电池剩余电量:4档(≤25%、25-50%、50-75%、≥75%)。
✧当前位置与指定区域(约十个点坐标)的相对位置关系判断计算时间<1秒
/区域。
3.3 电源性能指标
稳压电源输入端包括220V交流输入及24V直流输入:其中220V交流输入由稳压电源引出电源线匹配三向插头直接与船上的220V插座连接实现交流供电,电源线长度为2米;24V直流输入由稳压电源引出电源线直接与船上的蓄电池连接,电源线长度为3米。
✧输入:
⏹能够接入AC220V电源输入,输入电压范围:AC160~260V;
⏹能够接入宽电压直流输入,输入电压范围:DC9~45V;
⏹能够同时接入直流和交流两种电源输入,在有交流的情况下自动使
用交流,没有交流的情况下自动使用直流。
在交直流切换时不能产
生输出终端或者输出跳变。
✧保护:
⏹输入电压超出上述的电压范围或外接电源正负极接反时,自动截断
保护;
⏹具有输出端短路保护功能。
✧输出:
⏹最大输出功率:≤50W;
⏹平均功耗:≤8W;
⏹对外部输入最大电流不超过5A;
⏹输出电压:DC9~32V
⏹纹波:纹波≤3%;
3.4 工作环境
✧工作温度:室外天线-20℃~+80℃
✧冲击:30g、6ms ;
✧振动:5~5.5Hz、25.4mm双振幅;5.5~30Hz、2g;30~50Hz、0.8mm
双振幅;50~500Hz、5g
✧防水、防霉、防盐雾:符合国军标GJB367.2~87;
✧湿度:符合国军标GJB367.2~87;
✧电磁兼容性:符合国军标GJB151A~97相关标准
4 技术指标规范
4.1 定位通信模块
4.1.1 北斗性能指标
✧开机首捕时间:≤2sec;
✧失锁重捕时间:≤1sec;
✧发射功率:≤15W;
✧定位精度:北斗系统定位精度;
✧定位成功率:≥97%;
✧平均无故障工作时间:≥5000小时;
✧平均维修时间:≤0.5小时;
✧观测卫星仰角:10°~75゜方位角:0°~360゜;
✧通信频度:北斗用户卡控制。
4.1.2 GPS性能指标
✧天线:内置天线;
✧定位精度:<20米(1σ);
✧更新率:1秒;
✧开机首捕时间:<2min;
✧失锁重捕时间:<10sec;
4.2 稳压电源模块
✧内置直流稳压模块:该模块位于定位通信模块和显控模块内,能接
入9—32V或9~40V直流输入并具备超压自动截断保护和正负反接
保护。
截断后耐压80V/30秒。
可选的外接稳压电源模块:输入端包括160—260V交流输入及9—42V直流输入:其中交流输入由稳压电源引出电源线匹配三向插头
直接与船上的交流电插座连接实现交流供电,输入端电源线长度为
2米;直流输入由稳压电源引出电源线直接与船上的蓄电池连接,
电源线长度为5米,具备超压自动截断保护、正负反接保护和交直
流同时接入,优先使用交流并且实现无缝切换。
具备输出端短路保
护。
4.3 工作环境
4.3.1 高低温
舱外设备:-25℃~+70℃;舱内设备:–15℃~55℃,符合船用电子设备高低温标准SC/T7002.2-1992、SC/T7002.3-1992
4.3.2 碰撞冲击
加速度49m/s2、脉冲持续时间11ms;脉冲重复频率为60次/min~80次/min 条件下碰撞1000次。
符合船用电子设备碰撞标准SC/T7002.9-1992
4.3.3 振动
频率1Hz~12.5Hz,位移幅值±1.6mm; 频率12.5Hz~25Hz,位移幅值±0.38mm;频率25Hz~50Hz,位移幅值±0.10mm;每个频率范围内持续振动时间不少于15min。
符合船用电子设备振动标准SC/T7002.8-1992
4.3.4 防盐雾
+35℃连续雾化24小时;PH值 6.5~7.2,符合船用电子设备盐雾标准SC/T7002.6-1992
4.3.5 雨淋及溅水
要求整体水密处理;符合国军标GJB367.2~87;
4.3.6 湿热
相对湿度:93%,温度:40℃,时间:12.5小时;
符合船用电子设备恒定湿热标准SC/T7002.5-1992;
4.3.7 外壳防护
符合船用电子设备外壳防护标准SC/T7002.10-1992
显控模块防护等级IP54,定位通信模块防护等级IP66。