制导律实验报告
- 格式:pdf
- 大小:123.10 KB
- 文档页数:6

一、实验目的1. 了解红外信号制导的基本原理和特点;2. 掌握红外信号制导系统的组成及工作过程;3. 通过实验验证红外信号制导系统的性能。
二、实验原理红外信号制导是一种利用红外辐射进行目标识别和跟踪的制导技术。
其基本原理是:发射机发射特定频率的红外辐射,目标物体吸收部分能量并反射回接收机,接收机将接收到的红外信号进行处理,进而实现对目标的跟踪和制导。
三、实验仪器与设备1. 红外信号发射机;2. 红外信号接收机;3. 目标模拟器;4. 实验台;5. 数据采集系统;6. 计算机及相应软件。
四、实验步骤1. 连接实验设备,确保各部分工作正常;2. 将目标模拟器放置在实验台上,调整目标模拟器的位置和角度;3. 启动红外信号发射机和接收机,设置相关参数;4. 观察接收机显示屏,记录目标跟踪情况;5. 调整目标模拟器的位置和角度,重复步骤4;6. 记录实验数据,分析红外信号制导系统的性能。
五、实验结果与分析1. 目标跟踪情况:在实验过程中,红外信号制导系统能够较好地跟踪目标模拟器,实现目标识别和跟踪功能;2. 系统稳定性:实验过程中,红外信号制导系统表现出较好的稳定性,无明显抖动现象;3. 抗干扰能力:在实验过程中,系统对周围环境的干扰具有一定的抗干扰能力,但仍有部分影响;4. 跟踪精度:实验结果显示,红外信号制导系统的跟踪精度较高,能够满足实际应用需求。
六、实验结论1. 红外信号制导技术具有较好的目标识别和跟踪性能;2. 红外信号制导系统在实验过程中表现出较好的稳定性和抗干扰能力;3. 红外信号制导系统在跟踪精度方面满足实际应用需求。
七、实验改进建议1. 提高红外信号发射机和接收机的性能,降低系统噪声;2. 优化目标模拟器的设计,提高目标模拟器的仿真度;3. 研究新型红外信号处理算法,提高系统抗干扰能力;4. 优化实验环境,降低实验误差。
八、实验总结本次实验对红外信号制导技术进行了初步研究,通过实验验证了红外信号制导系统的性能。

一种具有机动目标加速度补偿的制导律设计制导律是制导系统中的关键算法,用于使导弹或飞行器能够准确地追踪和击中目标。
针对机动目标的设计,需要考虑到目标的速度和加速度变化,以及制导系统的响应时间和调整能力。
本文将介绍一种具有机动目标加速度补偿的制导律设计,以提高制导系统的精确性和鲁棒性。
一、引言在导弹或飞行器的制导系统中,目标通常会进行机动,即改变其速度和加速度,以避免被击中。
传统的制导律设计仅考虑目标的速度变化,并采用比例导引或自抗扰制导等方法来追踪目标。
然而,对于具有较大加速度变化的机动目标,单一的速度补偿往往无法满足要求。
二、机动目标加速度补偿的制导律设计为了实现对机动目标的精确追踪,需要引入目标加速度的补偿。
具体的制导律设计可以分为以下几个步骤:1. 目标模型建立针对机动目标,需要建立一个合适的数学模型来描述其运动状态。
常见的模型包括匀速运动模型、加速度模型等。
根据实际情况选择适合的模型,以便计算和预测目标的位置和速度。
2. 目标状态估计通过传感器获取目标的位置和速度信息,并结合目标模型进行状态估计。
利用滤波算法(如卡尔曼滤波)可以获得对目标状态的估计值,作为制导律设计的输入。
3. 制导律设计基于目标状态的估计值和目标模型,设计合适的制导律以使导弹或飞行器能够追踪目标。
在速度补偿的基础上,引入加速度补偿项,通过预测目标的加速度信息来修正制导指令。
4. 制导性能评估对设计的制导律进行性能评估,包括追踪精度、鲁棒性、抗干扰能力等。
利用仿真或实验数据进行验证,不断优化和调整制导律的参数以达到最佳的制导效果。
三、案例研究为了验证该制导律设计的有效性,进行了一系列的仿真和实验。
以导弹制导系统为例,选择了一种常见的机动目标,并模拟其速度和加速度变化。
通过设计的制导律进行导弹的仿真追踪,得到了较好的追踪精度和鲁棒性。
四、结论本文提出了一种具有机动目标加速度补偿的制导律设计,以提高制导系统对机动目标的追踪能力。

2014年8月第25卷 第4期装 备 学 院 学 报Journal of E q ui p ment Academ y Au g ust 2014Vol.25 No .4收稿日期 2014-03-20基金项目 国家级资助项目作者简介 闫 梁(1987-),男,博士研究生.主要研究方向:航天装备总体.y anlian g b j @163.com.沈怀荣,男,教授,博士生导师.变轨迹制导律技术研究及发展动态闫 梁1, 沈怀荣1, 赵继广2, 段永胜1(1.装备学院航天装备系,北京101416; 2.装备学院科研部,北京101416) 摘 要 变轨迹制导律的设计是在现代空间飞行器㊁高超声速飞行器㊁导弹设计过程中的关键技术㊂将变轨迹制导律划分为带末端约束的末制导律及标称制导律,概述了2类变轨迹制导律的技术难点,对带末端碰撞约束角的末制导律㊁标称制导律的在线规划算法,以及标称制导律的轨迹跟踪方法进行了综述,并分析了其可能的研究方向㊂关 键 词 制导律;约束碰撞角;标称制导律中图分类号 TJ 765.3文章编号 2095-3828(2014)04-0065-05文献标志码 ADOI 10.3783/j .issn.2095-3828.2014.04.015TechnicaI Research and DeveIo p ment Trend ofTra j ector y Sha p e Var y in g Guidance LawYAN Lian g 1, SHEN Huairon g 1, ZHAO Ji g uan g 2, DUAN Yon g shen g 1(1.De p artment of S p ace E q ui p ment ,E q ui p ment Academ y ,Bei j in g 101416,China ;2.Scientific Research De p artment ,E q ui p ment Academ y ,Bei j in g 101416,China )Abstract Desi g nin g the tra j ector y sha p e var y in g g uidance law (TSVGL )is a ke y ste p ,es p eciall yfor the modern s p acecrafts and su p ersonic fli g ht vehicles and missiles.TSVGL is classified as terminal g uidance with im p act an g le constraints and nominal g uidance law ,whose technical difficulties are stat -ed.Moreover ,a review of homin g g uidance with im p act an g ular constrains ,online p lannin g al g orithm and tra j ector y trackin g method of nominal g uidance law is g iven.The contents trends and directions are anal y zed ,which p rovides the references for develo p ments of technolo gy of p recision g uidance.Ke y words g uidance law ;im p act an g le constraints ;nominal g uidance law变轨迹制导律(TSVGL )[1]是指根据制导任务需要改变轨迹的形态,以达到指定约束要求㊂约束 具体是指规定的轨迹初㊁末端约束,包括位置㊁速度㊁加速度㊁角度等约束限制,或者2点间的能量最省,时间最小,轨迹最短的最优化轨迹㊂TSVGL 虽然是由文献[1]在1989年正式提出,但早已被广泛应用到航天飞机的再入制导,航空器的航迹制导,弹道导弹的制导,外星球的登陆等领域中㊂国内外文献尚未从主动改变轨迹的角度对其进行系统的综述,故本文首先分析TSVGL的基本问题及技术难点,着重从TSVGL 的研究方法对其展开评述㊂1 TSVGL 基本问题描述及技术难点TSVGL 主要侧重的是根据客观约束或使命任务主动改变轨迹的形态㊂一般分为2大类:一类是通过估算方法对终点进行预测,并实时校正控制量以达到终点,并满足一定的约束条件㊂其特点是,仅有较少的末端约束条件,计算量小,时效性强㊂主要应用在导弹的末制导上,如拦截弹拦截目标时需满足较大的末端约束碰撞角,以提高弹头效能㊂代表的制导律是偏置比例(bias p ro p ortional navi g ation g uidance,BPNG)[2]㊂另一类是通过数值计算方法规划轨迹,并实时跟踪,以达到终点,并满足一定的约束条件㊂其特点是约束条件多,计算复杂,但制导时间充足㊂主要应用在航天器的航迹制导,外太空探索的轨迹制导及弹道导弹的初\中段制导中,代表的制导律是标称制导律[3]2㊂带约束的末制导律的主要技术难点:针对各种类型的目标,在一定范围的控制力情况下,保证精确的末端碰撞角及较小的脱靶量㊂这就需要设计新型的制导律满足不同类型目标的要求㊂标称制导律的主要技术难点:一是研究在线实时规划轨迹算法㊂具有自主规划轨迹的飞行器,其优势是安全性强㊂可在出现故障时,迅速规划一条轨迹,使飞行器安全返回;灵活性强,具备多任务执行的能力㊂因此,研究轨迹的在线规划算法已经成为标称制导律的研究热点㊁难点㊂二是研究准确跟踪轨迹的方法㊂跟踪方法主要侧重将非线性的模型线性化,而后采用不同的控制律实施控制,将不同的模型线性化方法与控制律有效的结合是跟踪方法的研究难点㊂下节将针对TSVGL的技术难点对国内外研究现状展开评述㊂2国内外研究现状评述2.1带约束的末制导律设计方法保证零脱靶量,并带有末端碰撞角约束的制导律设计是一项富有挑战性的任务㊂近年来,许多学者热衷于此,并提出了基于比例导引(p ro-p ortional navi g ation,PN)的多种制导律㊂但尚未有学者以目标的类型,对制导律加以综述㊂故本文首先按照拦截的目标类型(低速目标㊁静止目标和高速目标),对3类制导律进行梳理,如表1所示㊂2014年,闫梁等[4]设计一种三维联合偏置比例制导(united biased p ro p ortional navi g ation, UBPN)律㊂该制导律采用时变偏置角速率和时变比例系数,结合顺轨㊁逆轨拦截模式的优点,使用负比例系数拦截高速目标(顺轨模式),使用正比例系数拦截低速目标(逆轨模式)㊂UBPN[4]从普适性制导律的角度出发,能够适应多种类型目标拦截的制导律,使其既能拦截高速目标(顺轨模式),又能拦截低速目标(逆轨模式),并同时考虑到末端碰撞角约束限制㊂这将加强制导律的普遍适用性㊂由此可见,制导律的发展将不只针对单一的目标进行设计,向普遍性制导律发展是一种必然的趋势㊂表1针对不同目标类型使用的制导律及其特点目标类型针对的制导律类型制导律特点低速目标偏置比例导引(biasedp ro p ortional navi g a-tion,BPN)采用时变的偏置角速率,正比例系数;考虑末端碰撞角约束限制2阶段PN制导律[5]在2个阶段分别调整比例系数;考虑末端碰撞角约束限制静止目标前后段分别使用BPN与PN制导[6]在2个阶段分别调整比例系数;考虑末端碰撞角约束限制高速目标滑模制导[7]顺轨模式拦截目标;考虑了末端碰撞角约束的限制负比例导引[8](retro-p ro p ortional-navi g a-tion,RPN)负比例系数;未考虑末端碰撞角约束限制因此,普遍性制导律的研究将有2种研究思路:一是将单一型的制导律,通过一定的算法,将其有机的结合,使其能拦截多种类型的目标;二是设计一种制导律能拦截多种类型的目标㊂2.2标称制导律的在线规划算法2.2.1间接法间接法是基于经典的变分法或者Pontr y a g in 极大(小)值原理,将最优控制问题转化为哈密顿两点边值问题(Hamiltonian boundar y value p roblem,HBVP)进行求解㊂在间接法应用中,最具代表性的是间接打靶法和有限差分法㊂间接打靶法[9]计算量小,属于简单的寻根方法,求解较小的变量及维数㊂因此,对计算机性能要求较低㊂且积分特性好,不易发散㊂适用于在航天飞机的短距离,所需约束条件较少的情况㊂但是随着初始猜想参数的增加,数值积分收敛性将变差,其收敛域减小,造成迭代收敛困难,故间接打靶法对初始猜想的参数要求准确性高,不适用于初值无法估计或者估计难度较大的轨迹规划中㊂对此,有限差分法[10]将预定的轨迹平均划分有限个时段,并通过有限差分的方法将微分方程组线性化,从而将哈密顿两点边值问题转化为代数方程组求根问题㊂这样有限差分法就从根本上克服了间接打靶法初值敏感的问题,并且适用于对轨道比较光滑且不易激烈振荡的飞行器轨迹㊂因此,间接法是在建立深入理解算法的基础上,用半解析法求66装备学院学报 2014年解最优化问题㊂迭代量小,时效性强,最优性有保证,可信度好㊂但其推导过程复杂,对于初值估计困难及复杂的约束问题,间接法求解有一定的困难㊂2.2.2直接法相对间接法,直接法通过将控制变量㊁状态变量离散化,将连续的最优控制问题转化为有限维的非线性规划问题,再利用数值优化方法进行求解㊂近年来,随着计算机计算性能的提高,直接法(direct method)在轨迹规划研究领域中备受国内外学者青睐㊂直接法通过把控制变量㊁状态变量离散并参数化,从而将连续的最优控制问题转换成有限维的非线性规划问题,再利用参数优化数值方法进行求解㊂直接打靶法(direct shootin g)[11]是直接法中的一种经典方法,该方法通过离散控制变量,在单区间上进行高阶数值积分来求取状态变量,当时间间隔增大时,积分精度会下降㊂若想提高运算精度,则必须增加每段的节点数,这会增大运算量,影响轨迹规划的时效性㊂但是对于终端时刻不固定的轨迹规划问题,可动态改变离散节点的个数,动态改变离散步长,提高节点的利用率和计算精度㊂另一种解决方法是同时离散控制变量与状态变量[12],在有限时间内提高计算精度,在各段逼近控制值,也有学者称该方法为多重打靶法㊂直接打靶法已被广泛应用在火箭上升轨迹和空间飞行器转移轨道优化等方面[13]㊂在多重打靶法的基础上,学者提出了配点法㊂经配点法转化得到的非线性规划问题的变量维数远高于打靶法,但降低了目标函数的病态程度,提高了收敛性和精度,且对优化初值不敏感[14]㊂Se y wald[15]对配点法加以改进,提出了微分包含法㊂与配点法相比,使用微分包含法转化的模型变量数目较少,求解速度更快,但在有限时域内控制变量的获取上存在局限性㊂为缓解优化参数敏感问题,Lu[16]提出了动态逆(inverse d y namics)方法㊂该方法是仅有离散控制变量的直接法,能够有效缓解参数敏感问题,且输出的初值估计比较容易,但该方法需要用到期望输出的前几阶导数信息,比一般直接法的参数化要求高㊂对此, Yakimenko[17-18]提出了虚拟域动态逆(inverse d y namics in the virtual domain,IDVD)方法,该方法通过引入虚拟路径,将轨迹优化问题从时域转化为虚拟域,再用动态逆的方法优化轨迹㊂ID-VD算法与近些年来发展起来的GPM(Gauss p seudos p ectral method)[19]㊁LGLPM(Le g endre-Gauss-Lobatto p seudos p ectral method)[20]相比:虽然IDVD算法在优化上仅能做到 近优 ,但是其收敛性和鲁棒性较强,优化时间远少于GPM㊁LGLPM,并且对优化的初值设置要求较低[21]㊂正是由于具有以上优点,该算法已在飞机航迹规划㊁航天器的再定位及弹道导弹拦截领域有深入地研究㊂关于IDVD算法的研究:文献[17]探讨了近似目标函数及其阶数的选择对优化结果的影响㊂在反动力学计算过程中,文献[18]比较了不同的节点数对优化结果的影响,但采用等距的节点分布计算控制量及状态量使得节点的使用率不高㊂对此,基于过载对虚拟路径变上限积分的变节点IDVD算法具有潜在的优势,研究该算法在选定节点数的情况下,如何缩短优化时间与提高计算精度的问题具有很大意义㊂文献[22]提出了VNIDVD(variable node inverse d y namics in the virtual domain)方法,该方法以控制变量曲线的曲率大小划分节点数,有效提高了节点的使用率,且优化时间较IDVD小㊂综上所述,直接法比间接法更早出现,但由于计算机性能较低而发展缓慢㊂随着数字计算机技术的迅速发展,以及航空航天领域的需求,直接法才有了较快发展㊂目前,传统直接法已广泛应用于各种飞行器的轨迹优化设计中㊂直接法相对间接法收敛域大,初值估计精度要求低,通用性好㊂但求解最优化问题时,只能做到 近优 ㊂2.3标称制导律的轨迹跟踪方法轨迹跟踪方法是研究准确跟踪预定轨迹的方法,其根源属于控制问题㊂在航天飞机的制导中,因倾侧角多次反转,导致不能完成大横程需求的飞行任务,Roenneke[23]将轨迹跟踪的控制问题转化为阻力空间中的线性调节器问题,利用LQR 线性最优调节器方法和非线性控制器设计方法设计的轨迹跟踪器㊂Mease[24]应用近似反馈线性化技术,将航天飞机只具有局部渐进特性的纵向参考轨迹跟踪律改进成为具有全局渐进跟踪性能的制导律㊂Lu[25]借鉴航天飞机阻力加速度与纵程的解析关系,利用成熟的序列二次规划算法求解得到阻力加速度剖面,并应用非线性预测控制律完成轨迹跟踪㊂非线性预测控制的难点主要集中在代价函数的选取及优化问题上㊂可分为 精确优化 及 近似优化 ㊂所谓 精确优化 是采用序列二次规划方法求解控制量,该方法通常会导致二次规划的76第4期闫梁,等:变轨迹制导律技术研究及发展动态非凸问题,而且计算量庞大,实时性难以保证㊂ 近似优化 成为近年来发展非线性模型预测控制的主要手段㊂其核心思想是近似系统模型,易得到优化解的代价函数,其最大的优势是解耦效果好,时效性强,系统参数绝对大部分为在线计算获得,适用于实时优化轨迹的跟踪㊂J OOS[3]2使用雅克比矩阵线性化方法,进而采用预测控制跟踪轨迹,然而由于其复杂的计算量而不能进行实时控制㊂CHEN[26]使用了泰勒展开式线性化模型,其方法应用在单输入单输出控制中㊂Nathan Sle g ers[27]也是使用了泰勒展开式线性化控制模型,并将其扩展到多输入多输出系统的控制中㊂JUNG[13]等取5个动态平衡点,采用线性插值的方法将模型线性化,使用预测控制方法跟踪预定的轨迹㊂由此可见,对于航天器的轨迹跟踪问题,采用预测控制方法跟踪轨迹,首先需对模型线性化㊂如前所述,轨迹规划方法有直接打靶法㊁配点法㊁微分包含法㊁动态逆法㊁伪谱法㊁VNIDVD㊂这些轨迹规划方法有一个共同的特性:先对模型线性化,而后转化为非线性规划问题㊂在研究轨迹跟踪方法时,借鉴轨迹规划的线性化方法,而后使用不同的控制律实施控制,跟踪预定的轨迹㊂3结论本文综述了国内外相关领域的研究成果,系统对TSVGL分类进行梳理,在深入研究各类算法的基础上,提出以下建议,可为TSVGL的设计提供参考㊂1)仅针对1种典型目标(高速㊁低速或者静止目标)设计的制导律具有以下缺点:从导弹型号研制方面讲,需对不同类型的目标设计不同的制导律,这将会增加导弹设计员的工作量㊂从作战层面讲,如果导弹的制导律可以改变,即可在作战前装订到导弹中,这将会给作战人员增大负担,同时也影响作战的时效性;如果导弹装订的制导律不可改变,那么将需要贮存大量的针对不同类型目标的导弹,这将会增加作战保障难度,对于机动发射的导弹更为突出㊂因此,可否从制导律的普适性出发,设计一种制导律能拦截高/低速目标,并带有末端约束碰撞角限制㊂这将加强制导律的普遍适用性,减少导弹型号研制费用,增强作战效能㊂2)随着计算机性能大幅度提高,直接法将会成为轨迹实时规划方法的主流㊂该方法的研究方向是实时性强㊁稳定性高㊂未来轨迹规划的发展需要对此进一步研究㊂轨迹在线规划可能更注重稳定性高,算法的实时性可用高性能的计算速率弥补㊂3)轨迹跟踪方法的研究同样偏向于用直接法的思路㊂将控制系统的模型线性化,而后使用不同的控制律进行控制㊂轨迹跟踪方法与轨迹规划方法将有一定程度的结合,这样就能有效利用轨迹规划离散后的结果,减少计算量㊂参考文献(References)[1]RAO M N.Anal y tical solution of o p timal tra j ector y-sha p in gg uidance[J].Journal of Guidance,Control,and D y namics, 1989,12(4):600-601.[2]BYUNG S K,JANG G L,HYUNG S H.Biased PNG law for im p act with an g ular constraint[J].IEEE Transactions on Aeros p ace and Electronic S y stems,1998,34(1):277-288.[3]JOOS A,MÜLLER M A,BAUMGÄRTNER D,et al.Non-linear p redictive control based on time-domain simulation for automatic landin g[C]//AIAA.AIAA Guidance,Control,and D y namics Conference2011.Portland,OR,United States:A-merican Institute of Aeronautics and Astronautics Inc.,2011.[4]闫梁,赵继广,沈怀荣,等.带末端约束碰撞角的三维联合偏置比例制导律设计[J/OL].(2013-12-25).航空学报,ht-t p://e p /kns/detail/detail.as p x?FileName= HKXB20140115000&DbName=CAPJ2014.[5]RATNOO A,GHOSE D.Im p act an g le constrained g uidancea g ainst nonstationar y nonmaneuverin g tar g ets[J].Journal of Guidance,Control,and D y namics,2010,33(1):269-275.[6]ERER K S,MERTTOPCUOGLU O.Indirect im p act-an g le-control a g ainst stationar y tar g ets usin g biased p ure p ro p or-tional navi g ation[J].Journal of Guidance,Control,and D y-namics,2012,35(2):700-703.[7]TAL S,GOLAN O M.Head p ursuit g uidance[J].Journal of Guidance,Control,and D y namics,2007,30(5):1437-1444.[8]PRASANNA H M,GHOSE D.Retro-p ro p ortional-navi g a-tion:A new g uidance law for interce p tion of hi g h-s p eed tar-g ets[J].Journal of Guidance,Control,and D y namics,2012, 35(2):377-386.[9]李惠峰.高超声速飞行器制导与控制技术[M].北京:中国宇航出版社,2012:265-268.[10]MATAUSEK M R.Direct shootin g method,linearization,and nonlinear al g ebraic e q uations.[J].Journal of O p timiza-tion Theor y and A pp lications,1974,14(2):199-212. [11]OCAMPO C A,MATHUR R.Variational model for o p ti-mization of finite-burn esca p e tra j ectories usin g a directmethod[J].Journal of Guidance,Control,and D y namics, 2012,35(2):598-608.[12]LENZ S M,BOCK H G,SCHöDER J P,et al.Multi p leshootin g method for initial satellite orbit determination[J].86装备学院学报 2014年Journal of Guidance,Control,and D y namics,2010,33(5): 1334-1346.[13]HESS R A,JUNG Y C.A pp lication of g eneralized p redic-tive control to rotorcraft terrain-followin g fli g ht[J].IEEETransactions on S y stems,Man and C y bernetics,1989,19(5):955-962.[14]SUBBARAO K,SHIPPEY B M.H y brid Genetic Al g orithmcollocation method for tra j ector y o p timization[J].Journalof Guidance,Control,and D y namics,2009,32(4):1396-1403.[15]SHEN H,SEYWALD H,POWELL R W.Desensitizin g theminimum-fuel p owered descent for Mars p in p oint landin g[J].Journal of Guidance,Control,and D y namics,2010,33(1):108-115.[16]LU P.Inverse d y namics a pp roach to tra j ector y o p timizationfor an aeros p ace p lane[J].Journal of Guidance,Control,andD y namics,1993,16(4):726-732.[17]YAKIMENKO O A.Direct method for ra p id p rotot yp in g ofnear-o p timal aircraft tra j ectories[J].Journal of Guidance, Control,and D y namics,2000,23(5):865-875. [18]BASSET G,XU Y,YAKIMENKO O p utin g short-time aircraft maneuvers usin g direct methods[J].Journal ofCom p uter and S y stems Sciences International,2010,49(3): 481-513.[19]BENSON D A,HUNTINGTON G T,THORVALDSEN TP,et al.Direct tra j ector y o p timization and costate estima-tion via an ortho g onal collocation method[J].Journal ofGuidance,Control,and D y namics,2006,29(6):1435-1440.[20]FAHROO F,ROSS I M.Costate estimation b y a Le g endrep seudos p ectral method[J].Journal of Guidance,Control, and D y namics,2001,24(2):270-277.[21]BOYARKO G A,ROMANO M,YAKIMENKO O A.Time-o p timal reorientation of a s p acecraft usin g an inversed y namics o p timization method[J].Journal of Guidance,Control,and D y namics,2011,34(4):1197-1208. [22]闫梁,李辕,赵继广,等.基于变节点虚拟域动态逆的轨迹实时优化[J].航空学报,2013,34(12):2794-2803.[23]ROENNEKE A J,CORNWELL P J.Tra j ector y control fora low-lift re-entr y vehicle[J].Journal of Guidance,Control,and D y namics,1993,16(5):927-933.[24]BHARADWAJ S,RAO A V,MEASE K D.Entr y tra j ecto-r y trackin g law via feedback linearization[J].Journal ofGuidance,Control,and D y namics,1998,21(5):726-732.[25]LU P.Entr y g uidance and tra j ector y control for reusablelaunch vehicle[J].Journal of Guidance,Control,and D y-namics,1997,20(1):143-149.[26]CHEN H,ALLGOWER F.Quasi-infinite horizon nonlinearmodel p redictive control scheme with g uaranteed stabilit y[J].Automatica,1998,34(10):1205-1217. [27]SLEGERS N,KYLE J,COSTELLO M.Nonlinear modelp redictive control techni q ue for unmanned air vehicles[J].Journal of Guidance,Control,and D y namics,2006,29(5): 1179-1188.(编辑:李江涛)96第4期闫梁,等:变轨迹制导律技术研究及发展动态。
微分几何制导律及其捕获性能分析摘要:本文通过采用瞬时碰撞点思想,对时间求导,来推导微分几何制导律,同时给出了相应目标捕获的充分条件。
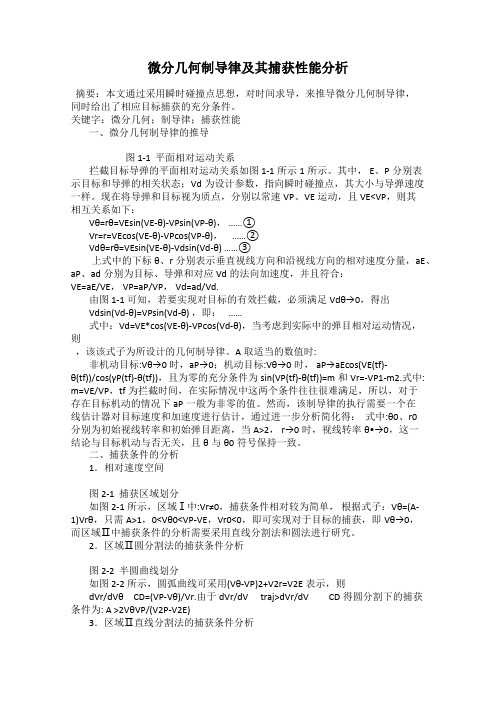
关键字:微分几何;制导律;捕获性能一、微分几何制导律的推导图 1-1 平面相对运动关系拦截目标导弹的平面相对运动关系如图 1-1所示1所示。
其中, E、P分别表示目标和导弹的相关状态;Vd为设计参数,指向瞬时碰撞点,其大小与导弹速度一样。
现在将导弹和目标视为质点,分别以常速VP、VE运动,且VE<VP,则其相互关系如下:Vθ=rθ=VEsin(VE-θ)-VPsin(VP-θ),……①Vr=r=VEcos(VE-θ)-VPcos(VP-θ),……②Vdθ=rθ=VEsin(VE-θ)-Vdsin(Vd-θ) ……③上式中的下标θ、r分别表示垂直视线方向和沿视线方向的相对速度分量,aE、aP、ad分别为目标、导弹和对应Vd的法向加速度,并且符合:VE=aE/VE, VP=aP/VP, Vd=ad/Vd.由图 1-1可知,若要实现对目标的有效拦截,必须满足Vdθ→0,得出Vdsin(Vd-θ)=VPsin(Vd-θ) ,即:……式中:Vd=VE*cos(VE-θ)-VPcos(Vd-θ),当考虑到实际中的弹目相对运动情况,则,该该式子为所设计的几何制导律。
A取适当的数值时:非机动目标:Vθ→0时,aP→0;机动目标:Vθ→0时,aP→aEcos(VE(tf)-θ(tf))/cos(γP(tf)-θ(tf)),且为零的充分条件为sin(VP(tf)-θ(tf))=m和Vr=-VP1-m2.式中: m=VE/VP,tf为拦截时间,在实际情况中这两个条件往往很难满足,所以,对于存在目标机动的情况下aP一般为非零的值。
然而,该制导律的执行需要一个在线估计器对目标速度和加速度进行估计,通过进一步分析简化得:式中:θ0、r0分别为初始视线转率和初始弹目距离,当A>2,r→0时,视线转率θ•→0,这一结论与目标机动与否无关,且θ与θ0符号保持一致。
实验一 8mm 波段主动探测器目标识别(一)一、实验目的1、了解运动目标的探测原理;2、掌握多普勒频率的分析和计算。
二、实验原理(一)连续波多普勒探测器收发原理本实验8mm 波段主动探测器采用连续波多普勒体制,即发射不加调制的连续波,利用多普勒效应工作的探测器,其探测原理框图如图1.1所示。
图1.1 连续波多普勒主动探测器测试原理图我们知道,在探测器和目标接近的过程中,由于探测器和目标存在径向运动,探测器发射的电磁波经目标反射之后被探测器接受一部分,接受的目标回波信号与发射信号之间存在着一个随时间而变化的相位差,致使回波信号的频率不同于发射信号的频率。
这一现象就叫做多普勒效应。
目标回波信号频率与发射频率之间的差频被称为多普勒频率。
多普勒频率的大小和符号与探测器及目标之间的接近速度有关。
设连续波多普勒探测器发射的是未加调制的正弦信号,则多普勒频率可表示为:02λRd V f = (1)式中:d f —多普勒频率;R V —接近速度;0λ—工作波长。
d f 在探测器与目标接近时为正值(接收信号频率高于发射信号频率),相远离时为负值(接收信号频率低于发射信号频率);二者若不存在相对运动,或接近速度为零时,d f 亦为零。
由此看出,回波信号的频率相对于发射信号变化了一个多普勒频率,其数值大小与目标间的接近速度R V 成正比,与发射源工作波长成反比。
因此,我们可以利用连续波多普勒探测器来检测目标的运动速度,即接近速度:R V =021λd f (2) 利用式子(2)还可以定距。
1、多普勒信号的提取根据下式:02λRd V f ==R V cf 20 (3) 即: c V f f R d 20= (4) 可见,多普勒频率的相对值正比于接近速度R V 与光速c 之比,d f 的正负值取决于相对运动方向。
一般来说,R V <<c ,所以相对多普勒频率d f /0f 是很小的,多处于音频范围。
因此,要从接收信号中提取多普勒频率信号,一般可采用混频后取其差频的方法,即r f f -0=d f 。
一、实验目的1. 理解导弹的基本原理和组成。
2. 掌握导弹飞行轨迹的计算方法。
3. 学习导弹制导系统的基本原理和实现方法。
4. 通过实验验证导弹飞行轨迹的准确性。
二、实验原理导弹是一种依靠自身动力装置推进,按预定弹道飞行的武器。
它由弹体、推进系统、制导系统、战斗部等组成。
本实验主要研究导弹的推进系统、制导系统和飞行轨迹。
三、实验器材1. 导弹原理实验平台2. 数据采集器3. 计算机4. 导弹飞行轨迹模拟软件四、实验步骤1. 准备阶段(1)熟悉实验平台的结构和功能。
(2)检查实验器材是否完好。
(3)了解实验原理和步骤。
2. 实验阶段(1)启动实验平台,进入导弹飞行轨迹模拟软件。
(2)设置导弹的基本参数,如发射速度、发射角度、弹道高度等。
(3)启动数据采集器,实时采集导弹飞行过程中的各项数据。
(4)观察导弹飞行轨迹,分析数据变化。
(5)根据采集到的数据,分析导弹的飞行性能。
3. 数据处理与分析阶段(1)对采集到的数据进行整理和分析。
(2)绘制导弹飞行轨迹图,观察弹道变化。
(3)计算导弹的飞行速度、加速度、飞行时间等参数。
(4)分析导弹制导系统的性能,提出改进措施。
4. 实验总结(1)整理实验数据和结果。
(2)撰写实验报告。
五、实验结果与分析1. 导弹飞行轨迹通过实验,我们得到了导弹的飞行轨迹图。
从图中可以看出,导弹在飞行过程中,其轨迹基本符合预定弹道。
在飞行过程中,导弹的速度和加速度发生了变化,这与导弹推进系统和制导系统的性能有关。
2. 导弹制导系统实验结果表明,导弹的制导系统基本能够满足飞行要求。
在飞行过程中,导弹的偏航、俯仰和偏转角度都在允许范围内。
但在某些情况下,导弹的飞行轨迹与预定弹道存在一定偏差。
这可能是由于制导系统精度不足或外界干扰所致。
3. 改进措施(1)提高制导系统的精度,减小外界干扰。
(2)优化推进系统,提高导弹的飞行速度和加速度。
(3)优化弹道设计,提高导弹的射程和命中精度。
六、实验结论通过本次实验,我们对导弹的基本原理和组成有了更深入的了解。
探测制导综合实验实验报告姓名:任路遥学号:0904330108 指导老师:吴礼实验一 8mm波段主动探测器目标识别(一)一、实验目的1、了解运动目标的探测原理;2、掌握多普勒频率的分析和计算。
二、实验设备和装置1、三角架、木制小车及轨道1套;2、直流稳压电源1台;3、示波器1台;4、数字万用表1只;5、面积大小不同的金属目标若干。
测试装置连接方块图如图1.7所示。
图1.7 测试连接示意图三、实验方法和步骤1、将探测器固定在三角架上,被测目标置于小车杆上,注意目标中心与天线波束中心保持水平;2、将直流稳压电源两输出端口电压分别调至+18V和+9V(见实样),并数字万用表测量确定,然后关闭电源;3、通过两付电源夹子线接到探测器电源输入端;4、将探测器输出接到示波器,具体见样机;5、打开电源,等待探测器稳定;6、径向匀速拉动放于轨道上的小车,接近探测器装置运动,接近到一定距离时,探测器蜂鸣器叫,观察示波器上显示的多普勒频率,测量目标与探测器的距离;7、加快小车运动速度,观察示波器上显示的多普勒频率,测量目标与探测器的距离;8、更换目标(可预先准备几种不同大小或材料的目标),重复步骤6和7,比较显示频率及蜂鸣器鸣叫时目标和探测器之间的距离;四、实验结果1.表1 8mm波段主动探测器目标识别实验数据记录一目标速度(m/s)多普勒频率(Hz) 目标与探测器距离(m)11v50 1 2v100.5 121v152 1.5 2v380 1.531v110 2 2v270 22. 实验现象:(1)用手掌慢慢水平挥动,随着挥动速度的变化,示波器上的多普勒频率随之变化。
逐渐增大挥动速度,最终达到一定的速度的时候探测器发出报警声,表示出现预定速度的目标。
改变挥动手臂的方向,效果逐渐变差,当垂直挥动的时候,不会发生报警信号,示波器上的波形的变化也最微弱。
(2)改变挥动位置与探测器之间的水平距离,重复一。
发现效果没有近距离明显,当达到大概五米的时候,几乎探测不到了。
导航与制导原理实验报告一.实验要求1.完成INS与GPS位置组合导航的仿真;2.画出组合导航后的位置误差、速度误差曲线;3.画出原始轨迹与组合导航后的轨迹比较图;(画图时弧度制单位要转换成度分秒制单位)4.结果分析5.提交纸版实验报告(附上代码)二.全局变量R=6378160; %地球半径(长半轴)f=1/298.3; %地球扁率wie=7.2921151467e-5; %地球自转角速率g0=9.7803267714; %重力加速度基础值deg=π/180; %角度min=deg/60; %角分sec=min/60; %角秒hur=3600; %小时dph=deg/hur; %度/时ts=0.1; %仿真采样时间三.组合导航仿真变量GPS_Sample_Rate=10; %GPS采样时间Runs=10; %由于随机误差,使用Kalman滤波时,应多次滤波,以求平均值Tg = 3600; %陀螺仪Markov过程相关时间Ta = 1800; %加速度计Markov过程相关时间四.Kalman Filter:估计状态初始值:Xk = zeros(18,1);估计协方差初始值:Pk=diag([min,min,min,0.5,0.5,0.5,30/Re,30/Re,30, 0.1*dph, 0.1*dph, 0.1*dph, 0.1*dph,0.1*dph, 0.1*dph, 1.e-3,1.e-3,1.e-3].^2); %18*18矩阵系统噪声方差:Qk=1e-6*diag([0.01,0.01,0.01,0.01,0.01,0.01,0.9780,0.9780,0.9780]).^2量测噪声方差:Rk=diag([1e-5,1e-5,10.3986]).^2系数矩阵 F, G, H 的表示,参考课件 6.2.1。
五.可能用到的公式(1)四元数Q的即时修正(符号⨂表示四元数乘法)式中nb nbx nby nbz 0Tbb b b ⎡⎤ω=ωωω⎦⎣为向量扩展四元数,标量部分为0。
导弹自寻的制导律实验报告
报告人:刘军
学号:030710218
一、实验目的
通过本实验加深了解导弹制导律的设计、实现,从而加深对导弹制导律的理解。
二、实验要求
1、实验准备
理论基础:学习过导弹制导与控制系统原理等相关课程。
软件基础:熟悉Matlab 等相关软件。
2、实验要求
熟练应用Matlab 编程语言设计各种形式的制导律,不少于3 种。
三、实验原理
相对运动方程是指描述导弹、目标、制导站之间相对运动关系的方程、建立相对运动方程是导引弹道运动学分析方法的基础。
相对运动方程习惯上建立在极坐标系中,其形式最简单。
下面分别建立自动瞄准制导的相对运动方程。
自动瞄准制导的相对运动方程实际上是描述导弹与目标之间相对运动关系的方程。
图1 导弹、目标间相对运动关系
r=。
其中r表示导弹相对目标的距离,当导弹命中目标时0
q目标线与基准线之间的夹角,称目标线方位角(简称目标线角)。
若从基准线逆时针
—1—
—2—
转到目标线上时,则q 为正。
σ、M σ分别为导弹、目标速度矢量与基准线之间的夹角,称之为导弹弹道角和目标航向角。
分别以导弹、目标所在位置为原点,若由基准线逆时针旋转到各自的速度矢量上时,则σ、M σ为正,当攻击平面为铅垂面时,σ就是弹道倾角 θ;当攻击平面为水平面时,θ就 是弹道偏V ψ。
η、M η分别为导弹、目标速度矢量与目标线之间的夹角,相应称之为导弹速度矢量前置角和目标速度矢量前置角(简称为前置角)。
分别以导弹、目标为原点,若从各自的速度矢量逆时针旋转到目标线上时,η、M η则为正。
考虑到上图所示角度间的几何关系,以及导引关系方程,就可以得到自动瞄准制导的相对运动方程组为:
1cos cos sin sin 0
M M D D M M M M
dr V V dt
dq r V V dt
q q ηηηηση
σηξ=−=−=+=+= 上面方程组中,10ξ=为描述导引方法的导引关系方程(或称理想控制关系方程)。
在自动瞄准制导中常见的导引方法有:追踪法、平行接近法,比例导引法等,相应的导引关系方程为:
追踪法:0η=,10ξη==;
平行接近法:0q q const ==,10dq dt ξ=
=; 比例导引法:d dq K dt dt σ=,10d dq K dt dt
σξ=−=; 上述方程组中;()D V t 、()M V t 、()M t η(或()M t σ)为已知,方程组中只含有5 个未知参数:()r t 、()q t 、()M t σ(或()M t η)、()t σ、()t η因此方程组是封闭的,可以求得确定解。
根据()r t 、()q t 可获得导弹相对目标的运动轨迹,称为导弹的相对弹道(即观察者在目标上所观察到的导弹运动轨迹)。
若已知目标相对地面坐标系(惯性坐标系)的运动轨迹之后,则通过换算可获得导弹相对地面坐标系的运动轨迹—绝对弹道。
—3—
四、实验内容
实验主用Matlab 编程语言设计各种形式的制导律,其主要结论如下:
1、 追踪法制导律仿真结果
制导律仿真的初始条件为:初始距离3000r m =; 1.5M V M =; 3.8D V M = (其中M 为马赫数);090q =o ,60M σ=o 。
仿真曲线如下图所示:
图1追踪法(距离r 曲线) 图2追踪法(目标视角q 曲线)
图3追踪法(导弹速度矢量角σ) 图4追踪法(目标视角变化率曲线)
2、平行接近法仿真仿真结果
制导律仿真的初始条件为:初始距离3000r m =; 1.5M V M =; 3.8D V M = (其中M 为马赫数); 090q =o ,60M σ=o 。
仿真曲线如下所示:
—4—
图5平行接近法(距离r 曲线) 图6平行接近法(目标视角q 曲线)
图7平行接近法(目标视角变化率曲线)
3、比例导引法仿仿真结果
制导律仿真的初始条件为:初始距离3000r m =; 1.5M V M =; 3.8D V M = (其中M 为马赫数);60M σ=o , 2.0K =。
图8比例导引法(距离r 曲线) 图9比例导引法(目标视角q 曲线)
图10目标速度矢量与目标视线夹角图11导弹速度矢量与目标视线的夹角
图12比例导引法(目标视角变化率曲线)
五、实验心得与体会
通过对图1到图12的分析,可以看出:
(1)自寻的制导是一种涉及导弹与目标相对运动的制导方式;
(2)平行接近法的弹道比较平直,曲率比较小是一种比较理想的导引方法;
(3)采用比例导引法时,导弹的理想弹道的曲率,介于平行接近法和追踪法之间;
(4)追踪法导引时,弹道曲率最大,最后形成尾追;
(5)平行接近法和比例导引法和追踪法三种方法都可以很好的导引导弹命中目标,但又都不甚完美,可以考虑一下它们之间的结合。
—5—
六、参考文献
[1] 阮毅,陈伯时.电力拖动自动控制系统 [M].4版.北京:机械工业出版社,2009.
[2] 王华,李有军,刘健存.Matlab电子仿真与应用教程 [M].2版.北京:国防工业出版社,2007.
[3] 孟秀云.导弹制导与控制系统原理 [M].北京:北京理工大学出版社,2003.
[4] 胡寿松.自动控制原理 [M].5版.北京:科学出版社,2007.
—6—。