对少齿差传动的电动执行器设计的研究
- 格式:pdf
- 大小:355.62 KB
- 文档页数:1

毕业设计:电动执行器设计摘要电动执行器被广泛应用于各种工业自动化过程的控制环节,能够精确地实现远程控制。
主要由伺服放大器和执行器两大部分组成。
电动执行器接受调节器来的4-20mA的直流信号,将其线性地转换成机构转角或直线位置位移,用以操作风门、挡板、阀门等调节机构,以实现自动调节。
本设计的重点是设计电动执行器的控制部分。
控制部分主要由单片机和可控硅组成。
其中单片机选用AT89C2051,AT89C2051单片机是51系列单片机的一个成员,是8051单片机的简化版。
AT89C2051构成的单片机系统是具有结构最简单、造价最低廉、效率最高的微控制系统,省去了外部的RAM、ROM和接口器件,减少了硬件开销,节省了成本,提高了系统的性价比。
可控硅选用BTA16。
本设计的电动执行器的控制部分主要是控制伺服电机的正反转。
关键词:电动执行器;控制;单片机;可控硅;电机Electric actuator designABSTRACTElectric actuators are widely used in various industrial automation control links, which can realize remote control precisely. Mainly by the servo amplifier and the actuator is composed of two parts, Electric actuator for DC signal regulator to 4~20mA, the linear conversion mechanism of the angular or linear displacement, to operate a damper, baffle, valve adjustment mechanism, in order to achieve automatic adjustment. The point of this design is to control the design of electric actuator part.Control part is mainly composed of single-chip microcomputer and controlled silicon. The SCM AT89C2051, AT89C2051 microcontroller is a member of the 51 Series MCU, is a simplified version of the 8051 single chip microcomputer. AT89C2051 constitute the SCM system is the most simple structure, low cost, most efficient micro-control system, eliminating the external RAM, ROM and the interface device, reduces the hardware cost, saves the cost, enhances the system performance. Silicon controlled rectifier using BTA16. The control part of the design of the electric actuator is the main positive inversion control servo motor.Keywords: electric actuator, Control; MCU; thyristor; motor目录第一章绪论 ------------------------------------------------------------------------------------------------------------- 11.1设计的背景和意义-------------------------------------------------------------------------------------------- 11.2概述 ---------------------------------------------------------------------------------------------------------------- 11.3电动执行器的性能特点 ------------------------------------------------------------------------------------- 21.4 电动执行器的发展-------------------------------------------------- 2第二章总体设计方案------------------------------------------------------------------------------------------- 52.1 电动执行器的结构框图---------------------------------------------- 52.2 单片机的选取------------------------------------------------------ 62.2.1单片机的内部结构----------------------------------------------------------------------------------- 62.2.2软硬件的开发-------------------------------------------------- 62.2.3引脚说明------------------------------------------------------ 72.2.4主要性能------------------------------------------------------ 82.3 输入电路的设计---------------------------------------------------- 92.4 防止振荡电路的设计----------------------------------------------- 102.5 信号的比较------------------------------------------------------- 132.6可控硅的选择与说明------------------------------------------------ 142.7 光电耦合器------------------------------------------------------- 162.8 晶振电路--------------------------------------------------------- 182.9 开关电源模块----------------------------------------------------- 192.10 系统总体电路设计------------------------------------------------ 202.10.1系统设计内容------------------------------------------------ 202.10.2电压跟随器的作用-------------------------------------------- 21第三章控制电机的程序和设计流程图-------------------------------------------------------------- 233.1 流程图----------------------------------------------------------- 23第四章电动执行器故障分析与维护------------------------------------------------------------------- 253.1 注意事项--------------------------------------------------------- 253.2 故障分析与维护--------------------------------------------------- 25结论 -------------------------------------------------------------------------------------------------------------------------- 27 致谢 -------------------------------------------------------------------------------------------------------------------------- 28 参考文献------------------------------------------------------------------------------------------------------------------ 29第一章绪论1.1设计的背景和意义电动执行器在自动控制系统中的作用是接受来自控制器的控制信号,通过电动执行器本身开度的变化,控制阀体等节流件的开度,达到控制流量的目的。

渐开线少齿差行星齿轮减速器的设计(零齿差输出机构)摘要在条件为输入转速为1450转/分钟、输入功率为5KW、传动比为25等这些技术参数的基础上设计一渐开线少齿差行星齿轮减速器。
渐开线行星齿轮减速器传动与普通定轴减速器传动相比具有承载能力大、体积小、效率高、重量轻、传动比大、噪声小、可靠性高、寿命长、便于维修等优点,同时还可以提高其承载能力。
本设计最主要的过程就是少齿差和零齿差设计参数的选取与计算,特别是变位系数的选取,需通过Matlab 软件编程计算,这样很大程度上节省了因选取的变位系数不当而需重新计算所需要的时间。
还可以多次给定初值选取最佳的变位系数,从而有利于少齿差和零齿差的结构设计。
同时还需对轴类零件、端盖、箱体的结构设计,装配时,需要对轴承、密封圈、挡圈、键进行选用。
关键词:减速器行星齿轮优化设计Involute few tooth difference planet gear reduction geardesign(zero tooth difference output element)AbstractThe planet gear reduction gear with few-tooth difference transmission and the ordinary dead axle reduction gear transmission compares has the bearing capacity in a big way, the volume small, the efficiency high, the weight light, the velocity ratio big, the noise small, the reliability high, the life long, is advantageous for merits and so on service, meanwhile may sharpen its bearing capacity.This design process most main is the few tooth difference and the zero tooth difference design variable selection and the calculation, specially dislodges the coefficient the selection, must through the Matlab software programming computation, save like this to a great extent because of the dislodgement coefficient which selected not when had the recomputation to need time. It also may many times assign the starting value selection best dislodgement coefficient, thus is advantageous to the few tooth difference and the zero tooth difference structural design.When simultaneously also needs the countershaft class components, the end cover, the body structural design, the assembly, needs to the bearing, the seal packing collar, the elastic ring, the key to carry on selects.Key word: The reduction gearplanet gear optimizes the design目录第一章概述51.1 发展概况51.2 发展方向51.3 传动特点61.4 设计目的6第二章齿差传动62.1 少齿差传动原理62.2 少齿差传动的结构类型82.2.1按输出机构型式分82.2.2按减速器的级数分82.2.3按安装型式分82.3 2K-H型传动装置92.4 传动比计算92.5 少齿差传动的特点和应用92.6 少齿差传动的设计顺序102.7 少齿差传动的各个限制条件112.7.1 齿廓不重迭干涉112.7.2 啮合角112.7.3 重合度112.7.4 变位系数122.8 少齿差齿轮副的几何计算12第三章零齿差传动163.1 零齿差传动原理163.2 零齿差传动的主要参数163.2.1 变位系数与中心距173.2.2 啮合齿面的诱导法曲率183.2.3 重迭系数183.2.4 齿面滑动系数193.2.5 啮合效率203.3 主要几何限制条件213.3.2 齿顶具有一定的厚度213.3.3 验算径向间隙213.3.4 差齿刀齿数要适当213.4 零齿差齿轮副的设计步骤223.5零齿差齿轮副的几何计算22第四章其他元件的选择264.1 键的选择264.2 齿轮的材料与其选择原则274.2.1 选用的齿轮材料:钢274.2.2 选择原则274.3 滚动轴承的选择284.4 轴的设计304.5 密封件34参考文献35致36第一章概述机械设计制造与其自动化专业是为了培养从事机械设计、制造行业的人才而开设的专业。
毕业设计:电动执行器设计摘要电动执行器被广泛应用于各种工业自动化过程的控制环节,能够精确地实现远程控制。
主要由伺服放大器和执行器两大部分组成。
电动执行器接受调节器来的4-20mA的直流信号,将其线性地转换成机构转角或直线位置位移,用以操作风门、挡板、阀门等调节机构,以实现自动调节。
本设计的重点是设计电动执行器的控制部分。
控制部分主要由单片机和可控硅组成。
其中单片机选用AT89C2051,AT89C2051单片机是51系列单片机的一个成员,是8051单片机的简化版。
AT89C2051构成的单片机系统是具有结构最简单、造价最低廉、效率最高的微控制系统,省去了外部的RAM、ROM和接口器件,减少了硬件开销,节省了成本,提高了系统的性价比。
可控硅选用BTA16。
本设计的电动执行器的控制部分主要是控制伺服电机的正反转。
关键词:电动执行器;控制;单片机;可控硅;电机Electric actuator designABSTRACTElectric actuators are widely used in various industrial automation control links, which can realize remote control precisely. Mainly by the servo amplifier and the actuator is composed of two parts, Electric actuator for DC signal regulator to 4~20mA, the linear conversion mechanism of the angular or linear displacement, to operate a damper, baffle, valve adjustment mechanism, in order to achieve automatic adjustment. The point of this design is to control the design of electric actuator part.Control part is mainly composed of single-chip microcomputer and controlled silicon. The SCM AT89C2051, AT89C2051 microcontroller is a member of the 51 Series MCU, is a simplified version of the 8051 single chip microcomputer. AT89C2051 constitute the SCM system is the most simple structure, low cost, most efficient micro-control system, eliminating the external RAM, ROM and the interface device, reduces the hardware cost, saves the cost, enhances the system performance. Silicon controlled rectifier using BTA16. The control part of the design of the electric actuator is the main positive inversion control servo motor.Keywords: electric actuator, Control; MCU; thyristor; motor目录第一章绪论 ------------------------------------------------------------------------------------------------------------- 11.1设计的背景和意义-------------------------------------------------------------------------------------------- 11.2概述 ---------------------------------------------------------------------------------------------------------------- 11.3电动执行器的性能特点 ------------------------------------------------------------------------------------- 21.4 电动执行器的发展-------------------------------------------------- 2第二章总体设计方案------------------------------------------------------------------------------------------- 52.1 电动执行器的结构框图---------------------------------------------- 52.2 单片机的选取------------------------------------------------------ 62.2.1单片机的内部结构----------------------------------------------------------------------------------- 62.2.2软硬件的开发-------------------------------------------------- 62.2.3引脚说明------------------------------------------------------ 72.2.4主要性能------------------------------------------------------ 82.3 输入电路的设计---------------------------------------------------- 92.4 防止振荡电路的设计----------------------------------------------- 102.5 信号的比较------------------------------------------------------- 132.6可控硅的选择与说明------------------------------------------------ 142.7 光电耦合器------------------------------------------------------- 162.8 晶振电路--------------------------------------------------------- 182.9 开关电源模块----------------------------------------------------- 192.10 系统总体电路设计------------------------------------------------ 202.10.1系统设计内容------------------------------------------------ 202.10.2电压跟随器的作用-------------------------------------------- 21第三章控制电机的程序和设计流程图-------------------------------------------------------------- 233.1 流程图----------------------------------------------------------- 23第四章电动执行器故障分析与维护------------------------------------------------------------------- 253.1 注意事项--------------------------------------------------------- 253.2 故障分析与维护--------------------------------------------------- 25结论 -------------------------------------------------------------------------------------------------------------------------- 27 致谢 -------------------------------------------------------------------------------------------------------------------------- 28 参考文献------------------------------------------------------------------------------------------------------------------ 29第一章绪论1.1设计的背景和意义电动执行器在自动控制系统中的作用是接受来自控制器的控制信号,通过电动执行器本身开度的变化,控制阀体等节流件的开度,达到控制流量的目的。

鞍山科技大学硕士学位论文新型2K-H少齿差传动的参数优化设计与实际受载齿数研究姓名:***申请学位级别:硕士专业:机械设计及理论指导教师:***20040315鞍山科技走擘硕士学位论文第一章绪论附录阴)来看,传动效率还不到20%(理论上只有15.7%),同时齿轮齿宽偏大f约为51ram),致使齿轮传动部件设计体积(o.0176m3)偏大。
造成这种现象,一方面是由于在制造及安装过程中存在着各种误差,另一方面,由于本减速器正处于研发阶段,其参数的选择不尽合理及其性能的研究不是很完善则是一个主要的因素。
因11新型2K-H少齿差减速器飚.1.1thcNew2K-HTypeR。
dI脚withSmallToothD诳hm∞此,针对这些缺点,有必要对该种传动形式进行进一步的分析与研究。
这对减少该减速器体积,提高传动效率,降低制造成本,无疑会带来可观的经济效益和社会效益。
目前为了促进这种新型少齿差行星齿轮传动的进~步推广应用与发展,我院“齿轮传动课题组”已对这种传动形式及其传动装置的结构原理、运动学、动力学、强度、制造工艺等方面展开了研究阴,本论文就是在此基础上展开以体积与效率为双目标函数的参数优化设计与实际受载齿数研究的。
这项研究得到了辽宁省教育厅高等学校科研项目基金的资助,项目编号:20092132。
1.4本论文所作的主要工作本论文所研究的减速器是一种新型少齿差减速器,论文将在己设计样机的基础上进行多目标参数优化方法设计,并对受载时同时接触的齿对数进行理论分析,为进一步对少齿差传动进行强度分析及日后产品的标准化、系列化设计工作提供可靠的理论依据。
本论文的主要工作如下:1.通过对新型2K-H少齿差减速器的分析,利用模糊理论,以体积和传动效率为双目标建立了模糊优化数学模型并展开参数多目标优化设计。
4图3.6程序调试结果示意图Fig3.6theDiagramoftheProgramDebuggingOutcome3.3少齿差参数优化结果下面是对初始设计参数:zl=112,z2=115,z3=109,z4=112,葺=1.25,x2=1.469m=3,吃=o.75,乜=50,玩=49分别利用模糊学中的最优水平截集法和普通的优化方法,取加权系数wr=O.5,w2=O.5时进行优化的结果(因自变量的取值差异较大,取迭代精度为O.002),从对比中显示最优水平截集法的优越性。
电子执行器齿轮静力学的有限元分析发布时间:2022-09-15T06:00:57.524Z 来源:《科技新时代》2022年4期2月作者:娄光路,随岁寒,段松微[导读] 现代汽车工业要求能精确控制增压器,提高增压器响应速度,减少滞后性,提高娄光路,随岁寒,段松微商丘工学院,机械工程学院,河南商丘 476000摘要:现代汽车工业要求能精确控制增压器,提高增压器响应速度,减少滞后性,提高动力性和降低排放。
执行器是涡轮增压器负责调节增压压力的机构。
传统气动式执行器,动作滞后,控制不精确,因此在涡轮增压器上电子执行器正逐步淘汰气动执行器。
然目前国外已厂家成熟的开发并已量产,这些产品往往价格较高,并且只装配在中高端发动机上。
为继续发挥增压器的优势和现存的问题,因此开发一款控制精度高并国产化率高的电子执行器具有重要意义。
为此我们设计了一款电子执行器,本文主要针对其齿轮强度进行分析。
为满足强度设计要求,应用Creo5.0 Simulate功能对设计的齿轮强度进行仿真计算。
仿真结果表明选用的齿轮材料强度满足要求。
关键词:电子执行器、有限元分析、Creo Simulate0 引言目前节能减排是汽车行业的发展趋势,其中发动机采用涡轮增压技术提高节能减排性能就是重要举措之一[1]。
高速发展的现代化工业社会使越来越多的公司参与了电动执行机构的研发和生产,电动执行机构的发展也可谓是工业发展的缩影[2]。
Bogner Mathias [3]等发明了一种使用有电子执行器的涡轮增压器,其技术特点是用电子执行器替代了传统气动执行器并将执行器集成到该水冷涡轮增压器的壳体上,避免了因高温而损坏。
李燕[4]对传动齿轮的选择做了有关研究,渐开线行星齿轮减速器传动与普通定轴减速器传动相比具有体积小、重量轻、效率高、承载能力大等优点。
苏海东[5]阐述执行器按其能源形式分为气动、电动和液动三大类。
有关执行器智能化方面,王玉峰[6]基于ARM设计了一套直行程电子式电动执行器控制器,能够从调节器接收4~20mA或1~5V信号,转换为电动执行器的角位移或直线位移带动调节机构,并把其位移转换为4~20mA输出。
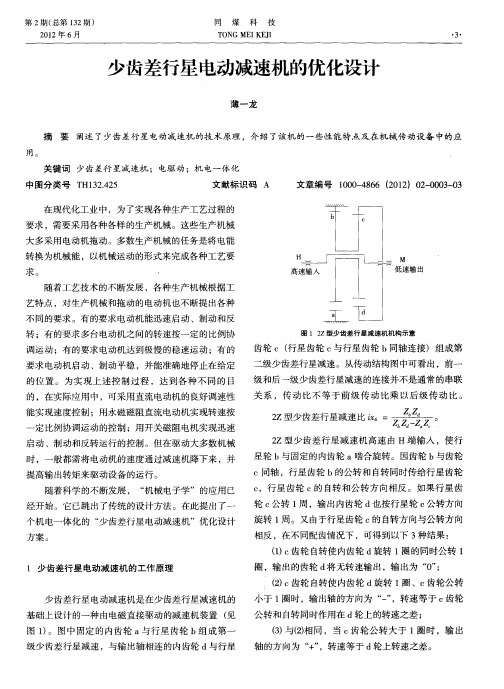
少齿差行星齿轮传动分析及应用摘要:少齿差行星齿轮传动由行星齿轮传动演变而来,由于行星齿轮副内外齿轮的齿数相差很少,因此简称少齿差传动,通常指渐开线少齿差行星齿轮传动。
少齿差轮系按传动形式可分为N型和NN型,其输出机构又设计成多种形式,文章分析轮系传动比的计算方法,对其典型结构的效率计算做了阐述,少齿差传动以其大传动比、小体积、轻重量、传动效率高等优点,在化工、轻工、冶金等机械设备中获得广泛应用。
关键词:少齿差传动;传动比;传动效率Abstract: the less tooth differenced planetary gear transmission of planetary gear transmission by evolved, by the planet gear pair of internal and external gear are very few number, so fewer tooth difference as transmission, usually refers to the involute less tooth differenced planetary gear transmission. Less tooth was sent by the transmission forms can be divided into N type and NN type, its export agencies and design into a variety of forms, this paper analyzes the calculation method of gear transmission ratio, the typical structure of the calculation efficiency paper and less tooth difference with its large transmission transmission, small volume, light weight, high transmission efficiency advantage, in the chemical industry, the light industry, metallurgy, and other machinery and equipment were widely available.Keywords: less tooth difference transmission; Transmission ratio; Transmission efficiency中图分类号:U463.212+.42 文献标识码:A文章编号:少齿差行星齿轮传动是由行星齿轮传动演变而来,是行星齿轮传动中的一种特殊的轮系。