哈工大控制科学与工程考研801控制原理大纲
- 格式:doc
- 大小:25.00 KB
- 文档页数:2
哈尔滨工程大学控制工程专业考研经验贴先做个自我介绍,黑龙江某双非院校信息工程学院控制工程专业,现为哈尔滨工程大学在读控制研究生。
下面是各个科目的考研经验分享。
专业课810自动控制原理的复习:控制工程专业属于自动化学院,考研专业课考的是810自动控制原理,专业课自控复习参考书《自动控制原理》刘胜编,哈尔滨工程大学出版社,第一轮专业课复习就是刘胜课本+刘胜课后习题答案,对于一些同学来说,看书就足矣,因为自控考试重点非常明显,不管是本科期末考试还是历年研究生入学真题,基本上每个章节一道大题,课本知识消化了课后习题一定要去做!结合刘胜的答案对比一下,还有觉得题目不够可以用《胡寿松自动控制原理题海》这本题海拿来练手,在解答题目的时候计算量比较大,所以草稿纸我们可以通过写一些步骤打下草稿,再写重要步骤就行,另外我再说下难点,根轨迹不难,按照步骤解题就没错,一道题15分左右,按步骤来也差不多了,线性系统串联并联校正及非线性系统都是难点,刘胜课本基础性比较好,要是还有时间也可以利用胡寿松的自控原理,稍加复习;最后11月份,和数学一样对错题进行回顾,再把历年真题反复去练考前每个礼拜都要像考场一样进行模拟考试,并且在脑袋里面想象下考试的真实感觉,要的就是那种feel!公共课数学的复习:数学是分阶段复习的,第一阶段是基础阶段,可以用李永乐的《复习全书》时间安排可以放在3-7月份,一般是上午俩小时,我们都知道打基础往往是痛苦的,这个阶段我主要是跟着老师的视频复习,做好基础笔记并且适当训练自己的解题能力,这一阶段不是特别建议去做课后习题,讲真,从开始复习到考研我一直都没做过课后习题,因为觉得课后习题难度的维数和考研不在一个层次就没放在心上了。
第二个阶段,7-9月份,这个时候又是怀疑自己能力和智力不行的时候,所以想和大家说两个字,坚持!我用的是《张宇真题大全解》,由于我第一个阶段复习得比较扎实,唯一的就是缺乏题库的训练,所以我特别建议大家对于真题的训练可以多来几遍,不仅仅是张宇的真题大全解,张宇的资料跳跃性有点大,不是特别注意细节,但真题大全解也是很nice的,分门别类,我们在复习的时候也可以一目了然。
目 录
2013年哈尔滨工业大学801控制原理考研真题
2012年哈尔滨工业大学801控制原理考研真题
2011年哈尔滨工业大学801控制原理考研真题
2010年哈尔滨工业大学801控制原理考研真题
2009年哈尔滨工业大学801控制原理考研真题
2008年哈尔滨工业大学801控制原理考研真题及详解
2007年哈尔滨工业大学401控制原理考研真题及详解
2006年哈尔滨工业大学401控制原理考研真题
2004年哈尔滨工业大学控制原理考研真题
2000年哈尔滨工业大学控制原理考研真题
2013年哈尔滨工业大学801控制原理考研真题。
硕士研究生入学考试大纲
课程名称:【801 】控制原理
一、考试要求要求考生全面掌握控制原理的基本概念和基础理论,并具有运用基本概念和基础理论分析问题与解决问题的能力。
二、考试内容
1) 控制系统的数学描述控制系统的运动方程式控制系统的传递函数控
制系统的方框图及其简化信号流图控制系统的状态空间描述
2) 线性连续控制系统的分析线性系统的时域法线性系统的根轨迹法线
性系统的频域法线性系统的状态空间法
3) 线性离散控制系统的分析线性系统的离散化脉冲传递函数线性离散控制
系统的分析与计算
4) 非线性系统的分析
相平面法描述函数法
5) 线性连续控制系统的综合
PID 控制规律控制系统的校正线性系统的状态空间综合法
三、试卷结构考试时间:180 分钟,满分150 分。
题型结构
简答题( 20 分) 分析、计算题( 100 分) 理论题( 30 分)
四、参考书目
(1) 裴润,宋申民,《自动控制原理》(上、下册)修订版,哈尔滨工业大学出版社,2011
(2) 胡寿松,《自动控制原理》第六版,科学出版社,2013
(3) Katsuhito Ogata ,《现代控制工程》第五版,电子工业出版社,2011。
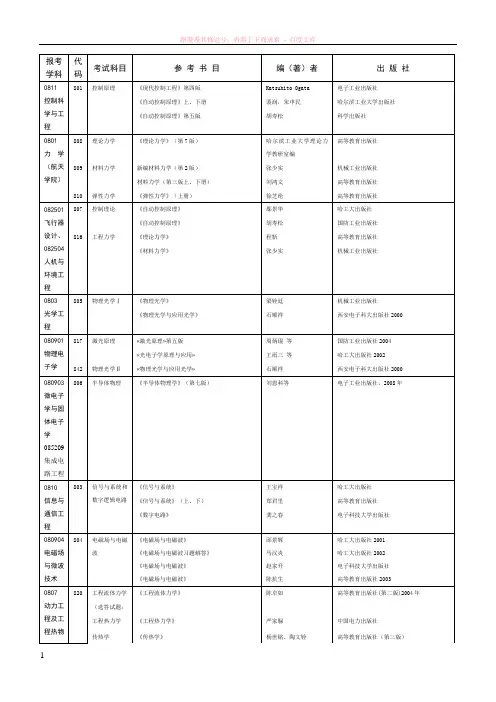
报考学科代码考试科目参考书目编(著)者出版社0811控制科学与工程801 控制原理《现代控制工程》第四版Katsuhito Ogata 电子工业出版社《自动控制原理》上、下册裴润,宋申民哈尔滨工业大学出版社《自动控制原理》第五版胡寿松科学出版社0801力学(航天学院)808 理论力学《理论力学》(第7版)哈尔滨工业大学理论力学教研室编高等教育出版社809 材料力学新编材料力学(第2版)张少实机械工业出版社材料力学(第三版上、下册)刘鸿文高等教育出版社810 弹性力学《弹性力学》(上册)徐芝纶高等教育出版社082501飞行器设计、082504人机与环境工程807 控制理论《自动控制原理》鄢景华哈工大出版社《自动控制原理》胡寿松国防工业出版社816 工程力学《理论力学》程靳高等教育出版社《材料力学》张少实机械工业出版社0803光学工程805 物理光学Ⅰ《物理光学》梁铨廷机械工业出版社《物理光学与应用光学》石顺祥西安电子科大出版社2000080901 物理电子学817 激光原理«激光原理»第五版周炳琨等国防工业出版社2004 «光电子学原理与应用»王雨三等哈工大出版社2002842 物理光学Ⅱ«物理光学与应用光学»石顺祥西安电子科大出版社2000080903微电子学与固体电子学085209集成电路工程806 半导体物理《半导体物理学》(第七版)刘恩科等电子工业出版社,2008年0810信息与通信工程803 信号与系统和数字逻辑电路《信号与系统》王宝祥哈工大出版社《信号与系统》(上、下)郑君里高等教育出版社《数字电路》龚之春电子科技大学出版社080904电磁场与微波技术804 电磁场与电磁波《电磁场与电磁波》邱景辉哈工大出版社2001《电磁场与电磁波习题解答》马汉炎哈工大出版社2002《电磁场与电磁波》赵家升电子科技大学出版社《电磁场与电磁波》陈抗生高等教育出版社20030807动力工程及工程热物820 工程流体力学《工程流体力学》陈卓如高等教育出版社(第二版)2004年(选答试题:工程热力学《工程热力学》严家騄中国电力出版社传热学《传热学》杨世铭、陶文铨高等教育出版社(第三版)理燃烧学《燃烧理论与设备》徐旭常机械工业出版社空气动力学)《气体动力学基础》潘锦珊国防工业出版社085212软件工程834 软件工程基础《软件工程_原理、方法与应用》史济民等高等教育出版社《C程序设计》谭浩强清华大学出版社0804仪器科学与技术826 电子技术基础 1.《模拟电子技术基础》王淑娟高等教育出版社,20102.《数字电子技术基础》杨春玲高等教育出版社,20103.《模拟电子技术基础》(第四版)华成英高等教育出版社,20064.《数字电子技术基础》(第五版)阎石高等教育出版社,20065.《电子技术基础》(模拟部分第五版)康华光高等教育出版社,20066.《电子技术基础》(数字部分第五版)康华光高等教育出版社,20067.《模拟电子技术基础学习指导与考研指南》王淑娟高等教育出版社,2009(第2次印刷)8.《数字电子技术基础学习指导与考研指南》王淑娟高等教育出版社,2010(第3次印刷)注:在(1)(2)(7)(8)、(3)(4)(7)(8)和(5)(6)(7)(8)中任选一套0808电气工程827 电路与数字电子技术电路部分教材:《电路理论基础(第三版)》陈希有高教出版社,2004年《电路(第五版)》邱关源高教出版社,2006年电路部分参考书:《电路考研大串讲》孙立山科学出版社,2006年《电路名师大课堂》,孙立山科学出版社,2006年数字电子技术部分:①《数字电子技术基础》杨春玲高等教育出版社,2010年②《数字电子技术基础》(第五版)阎石高等教育出版社,2006年③《数字电子技术基础》(数字部分第五版)康华光高等教育出版社,2006年④《数字电子技术基础学习指导与考研指南》王淑娟高等教育出版社,2010年,(第3次印刷)注:在(1)(4)、(2)(4)和(3)(4)中任选一套。
哈工大控制科学与工程考研801控制原理大纲一、课程概述(80字)控制工程是现代科学和技术中的一门重要学科,是利用各种控制方法和技术对各种系统进行调节、稳定和优化的学科。
本课程主要介绍经典控制理论的基本概念、分析方法和设计技术,为学生提供掌握控制原理的基础知识和分析能力。
二、教学内容(400字)(一)经典控制理论1.控制系统基本概念:信号、系统、控制等;2.信号与系统分析:时域分析、频域分析;3.系统建模与传递函数:微分方程、传递函数、状态空间;4.单输入单输出系统的稳定性分析:根轨迹法、频率响应法;5.单输入单输出系统的稳定性设计:根轨迹设计、频率响应设计。
(二)现代控制理论1.状态空间分析与设计:状态空间模型、可观性和可控性分析、极点配置;2.频率域分析与设计:频率响应函数、束缚角和幅值移相、李阿普诺夫法;3.综合控制设计:状态反馈、输出反馈、积分控制、鲁棒控制、自适应控制。
(三)应用实例1.传动系统的控制;2.运动控制系统的控制;3.温度控制系统的控制;4.液压控制系统的控制。
三、教学目标(200字)通过本课程的学习,要求学生具备以下能力:1.掌握经典控制理论的基本概念、分析方法和设计技术;2.熟悉现代控制理论的状态空间分析、频率域分析和综合控制设计方法;3.能够利用所学的控制原理理论知识进行实际控制系统的建模、分析和设计;4.具备一定的工程应用能力,能够应用控制原理解决实际问题。
四、教学方法(200字)本课程采用“理论教学与应用实践相结合”的教学方法,具体包括以下几个方面:1.理论课讲授:通过授课形式,对控制原理的基本概念、分析方法和设计技术进行讲解;2.实验课程:通过实验操作,锻炼学生分析和解决实际问题的能力,加深学生对控制原理的理解;3.课堂讨论:通过课堂讨论,促进学生的思维活跃和自主学习,提高学生的问题解决能力;4.课程设计:通过完成控制系统的建模、分析和设计任务,提高学生的综合应用能力。
2011年硕士研究生入学考试大纲
考试科目名称:控制原理考试科目代码:[801]
一、考试要求:
要求考生全面掌握控制原理的基本概念和基础理论,并具有运用基本概念和基础理论分析问题与解决问题的能力。
二、考试内容:
1)控制系统的数学描述
a:控制系统的运动方程式
b:控制系统的传递函数
c:控制系统的方框图及其简化
d:信号流图
e:控制系统的状态空间描述
2)线性连续控制系统的分析
a:线性系统的时域法
b:线性系统的根轨迹法
c:线性系统的频域法
d:线性系统的状态空间法
3) 线性离散控制系统的分析
a:线性系统的离散化
b:脉冲传递函数
c:线性离散控制系统的分析与计算
4) 非线性系统的分析
a:相平面法
b:描述函数法
5) 线性连续控制系统的综合
a: PID控制规律
b:控制系统的校正
c:线性系统的状态空间综合法
三、试卷结构:
a)考试时间:180分钟,满分:150分
b)题型结构
a:简答题(20分)
b:分析、计算题(100分)
c:理论题(30分)
四、参考书目
李友善主编自动控制原理(修订版),国防工业出版社,1989 胡寿松主编自动控制原理(第3版),国防工业出版社,1999 胡寿松主编自动控制原理(第4版),科学出版社,2002
吴麒主编自动控制原理,清华大学出版社,1990。