驱动程序架构
- 格式:ppt
- 大小:664.00 KB
- 文档页数:11
UNIX下设备驱动程序的基本结构在Unix系统里,对用户程序而言,设备驱动程序隐藏了设备的具体细节,对各种不同设备提供了一致的接口,一般来说是把设备映射为一个特殊的设备文件,用户程序可以象对其它文件一样对此设备文件进行操作。
UNIX对硬件设备支持两个标准接口:块特别设备文件和字符特别设备文件,通过块(字符)特别设备文件存取的设备称为块(字符)设备或具有块(字符)设备接口。
块设备接口仅支持面向块的I/O操作,所有I/O操作都通过在内核地址空间中的I/O缓冲区进行,它可以支持几乎任意长度和任意位置上的I /O请求,即提供随机存取的功能。
字符设备接口支持面向字符的I/O操作,它不经过系统的快速缓存,所以它们负责管理自己的缓冲区结构。
字符设备接口只支持顺序存取的功能,一般不能进行任意长度的I/O请求,而是限制I/O请求的长度必须是设备要求的基本块长的倍数。
显然,本程序所驱动的串行卡只能提供顺序存取的功能,属于是字符设备,因此后面的讨论在两种设备有所区别时都只涉及字符型设备接口。
设备由一个主设备号和一个次设备号标识。
主设备号唯一标识了设备类型,即设备驱动程序类型,它是块设备表或字符设备表中设备表项的索引。
次设备号仅由设备驱动程序解释,一般用于识别在若干可能的硬件设备中,I/O请求所涉及到的那个设备。
设备驱动程序可以分为三个主要组成部分:(1) 自动配置和初始化子程序,负责检测所要驱动的硬件设备是否存在和是否能正常工作。
如果该设备正常,则对这个设备及其相关的、设备驱动程序需要的软件状态进行初始化。
这部分驱动程序仅在初始化的时候被调用一次。
(2) 服务于I/O请求的子程序,又称为驱动程序的上半部分。
调用这部分是由于系统调用的结果。
这部分程序在执行的时候,系统仍认为是和进行调用的进程属于同一个进程,只是由用户态变成了核心态,具有进行此系统调用的用户程序的运行环境,因此可以在其中调用sleep()等与进程运行环境有关的函数。
Linux设备驱动程序原理及框架-内核模块入门篇内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块内核模块介绍Linux采用的是整体式的内核结构,这种结构采用的是整体式的内核结构,采用的是整体式的内核结构的内核一般不能动态的增加新的功能。
为此,的内核一般不能动态的增加新的功能。
为此,Linux提供了一种全新的机制,叫(可安装) 提供了一种全新的机制,可安装) 提供了一种全新的机制模块” )。
利用这个机制“模块”(module)。
利用这个机制,可以)。
利用这个机制,根据需要,根据需要,在不必对内核重新编译链接的条件将可安装模块动态的插入运行中的内核,下,将可安装模块动态的插入运行中的内核,成为内核的一个有机组成部分;成为内核的一个有机组成部分;或者从内核移走已经安装的模块。
正是这种机制,走已经安装的模块。
正是这种机制,使得内核的内存映像保持最小,的内存映像保持最小,但却具有很大的灵活性和可扩充性。
和可扩充性。
内核模块内核模块介绍可安装模块是可以在系统运行时动态地安装和卸载的内核软件。
严格来说,卸载的内核软件。
严格来说,这种软件的作用并不限于设备驱动,并不限于设备驱动,例如有些文件系统就是以可安装模块的形式实现的。
但是,另一方面,可安装模块的形式实现的。
但是,另一方面,它主要用来实现设备驱动程序或者与设备驱动密切相关的部分(如文件系统等)。
密切相关的部分(如文件系统等)。
课程内容内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块应用层加载模块操作过程内核引导的过程中,会识别出所有已经安装的硬件设备,内核引导的过程中,会识别出所有已经安装的硬件设备,并且创建好该系统中的硬件设备的列表树:文件系统。
且创建好该系统中的硬件设备的列表树:/sys 文件系统。
(udev 服务就是通过读取该文件系统内容来创建必要的设备文件的。
)。
LCD设备驱动1、LCD硬件原理a、利益液晶制成的显示器称为LCD,嵌入式系统中主要用TFT屏。
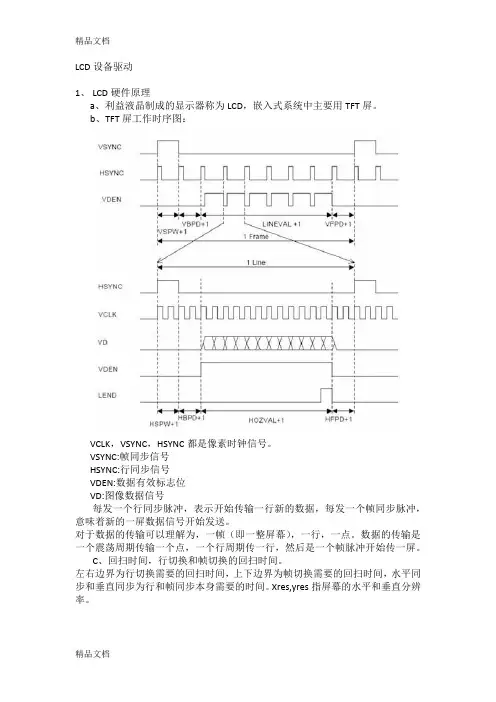
b、TFT屏工作时序图:VCLK,VSYNC,HSYNC都是像素时钟信号。
VSYNC:帧同步信号HSYNC:行同步信号VDEN:数据有效标志位VD:图像数据信号每发一个行同步脉冲,表示开始传输一行新的数据,每发一个帧同步脉冲,意味着新的一屏数据信号开始发送。
对于数据的传输可以理解为,一帧(即一整屏幕),一行,一点。
数据的传输是一个震荡周期传输一个点,一个行周期传一行,然后是一个帧脉冲开始传一屏。
C、回扫时间,行切换和帧切换的回扫时间。
左右边界为行切换需要的回扫时间,上下边界为帧切换需要的回扫时间,水平同步和垂直同步为行和帧同步本身需要的时间。
Xres,yres指屏幕的水平和垂直分辨率。
d、以我们TFT-LCD中需要了解到的硬件参数描述为例。
分辨率:768*1024(256*3=768)Spec中的时序图。
了解硬件参数需要根据具体不同的硬件设置参数。
2、帧缓冲(framebuffer)帧缓冲是linux系统为显示设备提供的借口,将显示缓冲区抽象。
帧缓冲设备为标准的字符设备,因此我们可以参加一般字符设备驱动的架构来理解。
上层应用程序只需要往帧缓冲设备的显示缓冲区中写入与显示点对应的区域的颜色值,对应的颜色就会显示在屏幕上。
所以对于LCD驱动的理解,主要部分就是对帧缓冲设备的操作。
a、帧缓冲设备驱动架构:b、理解帧缓冲设备需要了解的几个重要结构体,也就是在注册驱动时需要用到的几个结构体fb_info结构体(简称FBI)FBI是帧缓冲设备中最关键的一个结构体,包括了帧缓冲设备属性和操作的完整性struct fb_info {int node;int flags;struct fb_var_screeninfo var; /* Current var *///可变参数struct fb_fix_screeninfo fix; /* Current fix *///固定参数struct fb_monspecs monspecs; /* Current Monitor specs */struct work_struct queue; /* Framebuffer event queue */struct fb_pixmap pixmap; /* Image hardware mapper */struct fb_pixmap sprite; /* Cursor hardware mapper */struct fb_cmap cmap; /* Current cmap */struct list_head modelist; /* mode list */struct fb_videomode *mode; /* current mode */#ifdef CONFIG_FB_BACKLIGHT/* assigned backlight device *//* set before framebuffer registration,remove after unregister */struct backlight_device *bl_dev;/* Backlight level curve */struct mutex bl_curve_mutex;u8 bl_curve[FB_BACKLIGHT_LEVELS];#endifstruct fb_ops *fbops;struct device *device; /* This is the parent */struct device *dev; /* This is this fb device */int class_flag; /* private sysfs flags */#ifdef CONFIG_FB_TILEBLITTINGstruct fb_tile_ops *tileops; /* Tile Blitting */#endifchar __iomem *screen_base; /* Virtual address */unsigned long screen_size; /* Amount of ioremapped VRAM or 0 */void *pseudo_palette; /* Fake palette of 16 colors */#define FBINFO_STATE_RUNNING 0#define FBINFO_STATE_SUSPENDED 1u32 state; /* Hardware state i.e suspend */void *fbcon_par; /* fbcon use-only private area *//* From here on everything is device dependent */void *par;};其中,fb_ops,是指向硬件底层操作的函数指针。
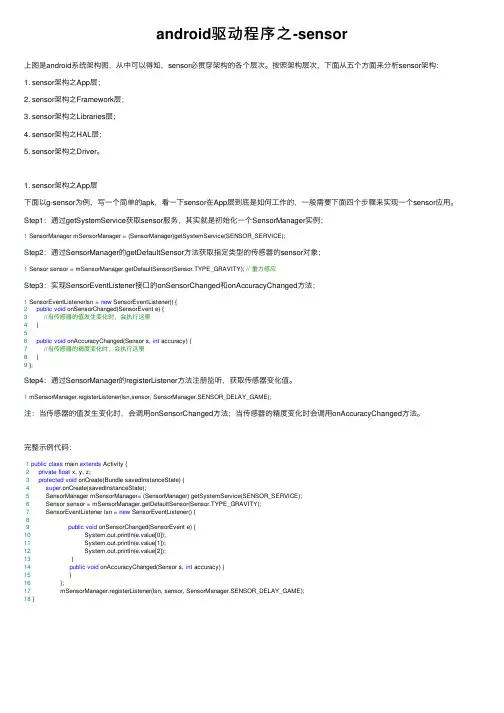
android驱动程序之-sensor上图是android系统架构图,从中可以得知,sensor必贯穿架构的各个层次。
按照架构层次,下⾯从五个⽅⾯来分析sensor架构:1. sensor架构之App层;2. sensor架构之Framework层;3. sensor架构之Libraries层;4. sensor架构之HAL层;5. sensor架构之Driver。
1. sensor架构之App层下⾯以g-sensor为例,写⼀个简单的apk,看⼀下sensor在App层到底是如何⼯作的,⼀般需要下⾯四个步骤来实现⼀个sensor应⽤。
Step1:通过getSystemService获取sensor服务,其实就是初始化⼀个SensorManager实例;1 SensorManager mSensorManager = (SensorManager)getSystemService(SENSOR_SERVICE);Step2:通过SensorManager的getDefaultSensor⽅法获取指定类型的传感器的sensor对象;1 Sensor sensor = mSensorManager.getDefaultSensor(Sensor.TYPE_GRAVITY); // 重⼒感应Step3:实现SensorEventListener接⼝的onSensorChanged和onAccuracyChanged⽅法;1 SensorEventListenerlsn = new SensorEventListener() {2public void onSensorChanged(SensorEvent e) {3//当传感器的值发⽣变化时,会执⾏这⾥4 }56public void onAccuracyChanged(Sensor s, int accuracy) {7//当传感器的精度变化时,会执⾏这⾥8 }9 };Step4:通过SensorManager的registerListener⽅法注册监听,获取传感器变化值。
25.2 USB驱动程序框架Linux内核提供了完整的USB驱动程序框架。
USB总线采用树形结构,在一条总线上只能有唯一的主机设备。
Linux内核从主机和设备两个角度观察USB总线结构。
本节介绍Linux内核USB驱动程序框架。
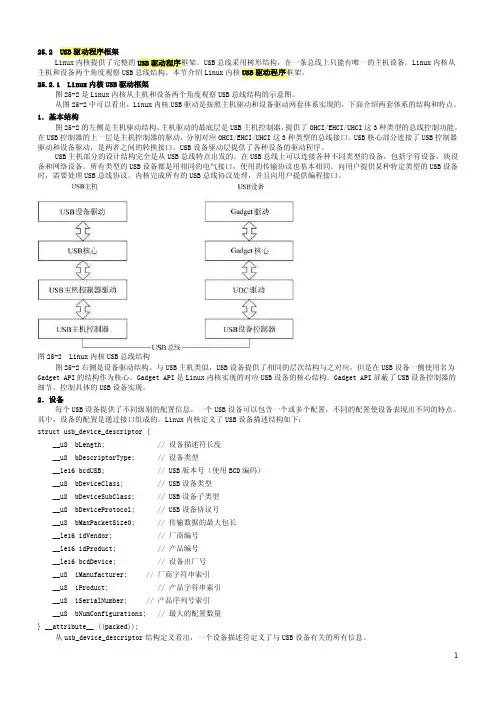
25.2.1 Linux内核USB驱动框架图25-2是Linux内核从主机和设备两个角度观察USB总线结构的示意图。
从图25-2中可以看出,Linux内核USB驱动是按照主机驱动和设备驱动两套体系实现的,下面介绍两套体系的结构和特点。
1.基本结构图25-2的左侧是主机驱动结构。
主机驱动的最底层是USB主机控制器,提供了OHCI/EHCI/UHCI这3种类型的总线控制功能。
在USB控制器的上一层是主机控制器的驱动,分别对应OHCI/EHCI/UHCI这3种类型的总线接口。
USB核心部分连接了USB控制器驱动和设备驱动,是两者之间的转换接口。
USB设备驱动层提供了各种设备的驱动程序。
USB主机部分的设计结构完全是从USB总线特点出发的。
在USB总线上可以连接各种不同类型的设备,包括字符设备、块设备和网络设备。
所有类型的USB设备都是用相同的电气接口,使用的传输协议也基本相同。
向用户提供某种特定类型的USB设备时,需要处理USB总线协议。
内核完成所有的USB总线协议处理,并且向用户提供编程接口。
图25-2 Linux内核USB总线结构图25-2右侧是设备驱动结构。
与USB主机类似,USB设备提供了相同的层次结构与之对应。
但是在USB设备一侧使用名为Gadget API的结构作为核心。
Gadget API是Linux内核实现的对应USB设备的核心结构。
Gadget API屏蔽了USB设备控制器的细节,控制具体的USB设备实现。
2.设备每个USB设备提供了不同级别的配置信息。
一个USB设备可以包含一个或多个配置,不同的配置使设备表现出不同的特点。
其中,设备的配置是通过接口组成的。
Linux内核定义了USB设备描述结构如下:struct usb_device_descriptor {__u8 bLength; // 设备描述符长度__u8 bDescriptorType; // 设备类型__le16 bcdUSB; // USB版本号(使用BCD编码)__u8 bDeviceClass; // USB设备类型__u8 bDeviceSubClass; // USB设备子类型__u8 bDeviceProtocol; // USB设备协议号__u8 bMaxPacketSize0; // 传输数据的最大包长__le16 idVendor; // 厂商编号__le16 idProduct; // 产品编号__le16 bcdDevice; // 设备出厂号__u8 iManufacturer; // 厂商字符串索引__u8 iProduct; // 产品字符串索引__u8 iSerialNumber; // 产品序列号索引__u8 bNumConfigurations; // 最大的配置数量} __attribute__ ((packed));从usb_device_descriptor结构定义看出,一个设备描述符定义了与USB设备有关的所有信息。

设备驱动程序基本结构设备驱动程序是计算机系统中用来控制硬件设备的软件模块。
它负责与硬件设备进行通信,将操作系统的指令翻译成硬件可以理解的信号,以实现对设备的控制和管理。
一个良好设计和实现的设备驱动程序能够提高系统的性能和稳定性,保证硬件设备的正常工作。
设备驱动程序的基本结构由以下几个部分组成:1. 初始化和资源分配:在设备驱动程序运行之前,需要进行一些必要的初始化工作。
这包括分配内存空间、初始化寄存器、设置中断等。
这些操作旨在为设备驱动程序提供必要的资源,使其能够正常工作。
2. 设备注册和注销:在设备驱动程序加载时,需要将设备与驱动程序进行绑定,以建立二者之间的联系。
这一过程称为设备注册。
当设备不再需要被驱动时,需要将其从驱动程序中注销,释放相关资源。
设备注册和注销是设备驱动程序中非常重要的环节。
3. 设备操作函数:设备操作函数是设备驱动程序中最核心的部分。
它包括设备的打开、关闭、读取和写入等操作。
这些操作通过调用设备驱动程序提供的接口函数来实现。
设备操作函数能够实现对硬件设备的控制和管理,使其能够完成特定的功能。
4. 中断处理函数:中断是计算机系统中一种常见的事件处理机制。
当硬件设备发生某些特定的事件时,会触发中断信号,通知操作系统进行相应的处理。
设备驱动程序中的中断处理函数负责处理这些中断事件,以实现对设备的实时响应。
5. 设备文件系统接口:设备驱动程序与操作系统之间通过文件系统进行通信。
设备驱动程序需要实现相应的文件系统接口,以便操作系统能够调用驱动程序提供的功能。
这些接口包括设备文件的打开、关闭、读取和写入等操作。
6. 错误处理和调试:设备驱动程序中需要实现相应的错误处理机制,以应对可能出现的错误情况。
同时,为了方便调试和排查问题,设备驱动程序还需要提供相应的调试接口和日志功能。
7. 设备驱动程序的可移植性:设备驱动程序需要具备良好的可移植性,以适应不同的硬件平台和操作系统。
为了实现可移植性,设备驱动程序需要遵循一定的编程规范和标准,使用通用的接口和数据结构。
驱动程序原理什么是驱动程序?在计算机系统中,驱动程序(Driver)是一种软件,它充当操作系统与硬件设备之间的翻译器和协调者。
驱动程序的主要功能是将操作系统提供的标准命令转换为硬件设备可以理解的指令,并将设备产生的数据和事件传递给操作系统。
驱动程序通常由设备厂商开发,并与特定的硬件设备相对应。
每个硬件设备都需要一个特定的驱动程序来实现与操作系统的交互。
驱动程序原理驱动程序原理涉及到多个方面,包括硬件架构、操作系统、设备接口等。
下面将详细介绍与驱动程序原理相关的基本原理。
1. 硬件架构计算机系统中有多种不同类型的硬件设备,例如处理器、内存、磁盘、显示器等。
每种硬件设备都有自己特定的工作方式和数据交换方式。
驱动程序需要了解硬件设备的工作原理和寄存器结构。
寄存器是硬件设备内部用于存储控制信息和状态信息的特殊内存单元。
通过读写寄存器,驱动程序可以与硬件设备进行交互。
2. 操作系统操作系统是计算机系统的核心组成部分,它负责管理和控制硬件资源,并提供给应用程序使用。
驱动程序需要与操作系统进行交互,以便获取设备的配置信息、处理设备的中断请求、发送命令给设备等。
不同的操作系统可能有不同的驱动程序接口和机制。
3. 设备接口设备接口是驱动程序与硬件设备之间进行数据传输和控制的通道。
常见的设备接口包括串行接口(如RS232)、并行接口(如USB、LPT)、网络接口(如以太网)等。
驱动程序需要了解设备接口的工作方式和协议,以便正确地发送和接收数据。
4. 驱动程序架构驱动程序通常采用模块化的架构,由多个功能模块组成。
•控制模块:负责与操作系统交互,处理中断请求,管理设备资源等。
•数据传输模块:负责将数据从应用程序传输到硬件设备,或从硬件设备传输到应用程序。
•配置模块:负责读取和设置硬件设备的配置信息。
•错误处理模块:负责监测和处理设备操作过程中的错误。
5. 驱动程序开发驱动程序的开发需要使用特定的开发工具和编程语言。
常见的驱动程序开发工具包括编译器、调试器、模拟器等。
事件驱动架构EDA事件驱动架构EDAEDA是事件驱动架构,在面向服务架构(SOA)领域,一个比较重要的概念就是事件驱动的体系结构 (EDA),英文全称为Event-driven Architecture。
EDA允许您将创建或遇到事件的过程中的所有这些事件发布到一个中央事件处理主干上,从而使所有感兴趣的相关方可以从此处找到它们。
产生事件的过程或服务本身无需考虑这些外部各方,否则,会给该特定过程的执行带来压力,系统之间交织过密,造成维护困难。
对于IT部门来说幸运的是,EDA方法与SOA是互补的,随着具有前瞻思想的IT部门伴随Web Services向前进时,他们开始更多地采用此方法。
采用基于SOA的方法,开发者通过将那些定义可重复用业务功能的“服务”或软件部件组装起来,就能构建应用程序。
什么是EDA?Gartner在2003年引入了一个新术语事件驱动架构(Event Driven Architecture,EDA), 主要用于描述一种基于事件的范例。
EDA是一种用于进行设计和实现应用和系统的方法—在这些应用和系统里, 事件所触发的消息可以在独立的、非耦合的组件和服务之间传递,这些模块彼此并不知晓对方。
这些应用程序中的EDA极大地改进了企业或政府响应不同的、表面上毫无关联事件的能力。
通过提供瞬时过滤、聚合和关联事件的能力,EDA可以快速地检测出事件并判断它的类型,从而帮助组织机构快速、恰当地响应和处理这些事件。
通常事件可以采用发布/订阅机制。
事件驱动架构(EDA)的最佳方法EDA应用事件驱动架构(EDA)是分布式应用程序的普遍架构形式,非常典型的是:分布式应用程序都被设计成为模块化的、封装的、可共享事件服务的组件。
能够通过应用程序、适配器以及无入侵性的代理操作来创建这些服务。
由于EDA的特点,在金融贸易、能源贸易、电信以及欺诈检测这些行业中,一直都在采用事件驱动架构(EDA)技术。
近期在我国政府的电子政务建设中,利用EDA分布式处理架构的优势构建共享交换平台,实现跨部门、跨平台、跨应用系统的政务信息资源的共享与交换,并对政府应急系统和跨委办局之间的业务协同办公提供支撑和保障。
android 驱动面试题Android驱动面试题1. 介绍Android驱动Android驱动是指在Android操作系统上与硬件设备进行通信的一种软件。
通过驱动程序,Android操作系统可以与特定的硬件设备进行交互,实现数据传输、设备控制等功能。
2. Android驱动的主要作用是什么?Android驱动的主要作用在于将硬件设备的功能与Android操作系统无缝地连接起来,使得Android应用程序可以通过驱动程序与硬件设备进行交互。
驱动程序起到了桥梁的作用,实现了软硬件的衔接。
3. 请简要介绍Android驱动的架构。
Android驱动的架构主要包括以下几个部分:- Hardware Abstraction Layer (HAL): 提供了一系列的接口,用于访问底层硬件设备。
HAL将驱动程序与硬件具体实现细节隔离开来,使得Android操作系统在不同硬件平台上的兼容性更好。
- Kernel Driver: 是Android驱动的核心部分,负责对硬件设备进行底层的操作和控制。
驱动开发的核心内容通常在这一层实现。
- Native Libraries: Android提供了一系列的Native Libraries,用于提供驱动程序的 API 接口,使得应用程序可以方便地调用驱动功能。
- IOCTL: 是一种 I/O 控制命令,用于驱动程序与用户空间进程之间进行通信。
在Android中,IOCTL常用于设备的控制和数据交换。
4. 请说明Android驱动开发的常用语言和工具。
在Android驱动开发中,常用的语言是C和C++,因为这两种语言能够更好地与底层硬件进行交互。
而常用的工具包括:- Android Studio: 是Android应用开发的主要IDE,可以支持驱动程序的开发和调试。
- ADB(Android Debug Bridge): 是一个调试工具,用于与Android设备进行通信。
操作系统的结构内核外壳和驱动程序操作系统的结构:内核、外壳和驱动程序操作系统是计算机系统中最基础和核心的软件之一,它负责管理和控制计算机的硬件和软件资源,提供给用户和其他应用程序一个可靠和友好的运行环境。
操作系统的结构由内核、外壳和驱动程序组成,它们各自承担着不同的功能和任务。
一、内核内核是操作系统的核心部分,它负责控制和管理计算机的硬件资源,并提供必要的系统调用接口供其他应用程序使用。
内核的主要功能包括进程管理、内存管理、文件系统管理以及设备驱动程序管理等。
1. 进程管理:内核负责创建、调度和终止进程,为不同的进程分配资源,确保它们能够有序地运行。
内核中的进程调度算法可以根据不同的策略来选择下一个要执行的进程,例如先来先服务、最短作业优先等。
2. 内存管理:内核管理计算机的内存资源,包括内存的分配和释放,内存的保护和共享,以及虚拟内存的管理等。
内核通过使用页表等机制将虚拟地址映射到物理地址,为应用程序提供一个独立且可扩展的内存地址空间。
3. 文件系统管理:内核负责管理计算机上的文件系统,包括文件的创建、读取、写入和删除等操作。
内核通过文件系统驱动程序将文件存储在磁盘上,并提供文件系统的接口供用户和应用程序使用。
4. 设备驱动程序管理:内核负责管理计算机的硬件设备和设备驱动程序。
它通过设备驱动程序与各种硬件设备进行通信,并提供设备的接口和控制功能。
内核中的设备驱动程序可以与硬件设备进行交互,完成输入输出等操作。
二、外壳外壳是操作系统的用户接口,它提供了用户与操作系统之间的交互手段。
外壳可以分为命令行界面和图形界面两种形式。
1. 命令行界面:命令行界面允许用户通过输入命令来操作系统。
用户可以通过输入命令来执行各种文件操作、系统设置、进程管理等任务。
命令行界面可以提供高度的灵活性和可扩展性,但需要用户具备一定的命令行操作知识。
2. 图形界面:图形界面通过图形化的窗口、菜单和按钮等元素来提供用户与操作系统的互动。
流接口驱动程序的系统结构图文档分两部分内容:(1)Dll 、应用程序和设置驱动程序的注册键(2)USB 流接口驱动流程及函数调用一:Dll 、应用程序和设置注册键1: Dll 动态链接库流接口驱动其基本框架是一个dll 动态连接库。
所有的USB 设备驱动程序必须在它们的DLL 库中呈现一定的入口点从而与USBD 模块进行交互,也使得驱动程序能够创建和管理任何可能需要的注册键。
入口点函数有:USBInstallDriver,USBDeviceAttach,USBUnInstallDriver 。
加载驱动的时候,会到你的dll 中去找xxx_系列的函数,所以你的dll 一定要导出表中所示函数符号。
其中XXX 是三个答大写字母,如串口就表示为COM ,这也是注册表中Prefix 的值。
表1: 函数名称描述 XXX_Init当设备管理器初始化一个USB 设备的时候调用这个函数 XXX_Deinit当设备管理器卸载一个USB 驱动程序的时候调用这个函数 XXX_Open在打开一个USB 设备驱动的时候应用程序通过CreatFile()函数调用这个函数 XXX_Close在USB 驱动程序关闭的时候应用程序通过CloseHandle()函数调用这个函数 XXX_IOControl上层的软件通过DeviceIoControl()函数可以调用这个函数 XXX_Read USB 设备驱动程序处于打开状态的时候由应用程序通过ReadFile()函数调用 用户应用程序内核文件系统代码 基于Windows CE 的平台外接USB 设备 设备管理器 流接口驱动程序 USBD 模块 HCD 模块XXX_Seek 对USB设备的数据指针进行操作,由应用程序通过SetFilePointer()函数调用XXX_Write 在一个USB设备驱动程序处于打开状态时由应用程序通过WriteFile()调用XXX_PowerUp 在系统重新启动前调用这个函数XXX_PowerDown 在系统挂起前调用这个函数DLL中必须建立一个.def文件定义需要输出的函数,这些函数能够被其它代码用动态加载的方法调用。
事件驱动架构模型事件驱动架构模型(Event-Driven Architecture,简称EDA)是一种基于事件的软件设计模式,通过事件的产生、传递和响应来驱动应用程序的执行流程。
它具有松耦合、高可扩展性和灵活性的特点,被广泛应用于各种领域的软件系统中。
事件驱动架构模型的核心思想是将应用程序的功能划分为独立的事件和事件处理器。
事件是系统中发生的一些特定的状态变化或用户操作,可以是用户触发的,也可以是其他系统组件触发的。
事件处理器则负责处理特定类型的事件,并采取相应的行动。
在事件驱动架构模型中,事件通过事件总线进行传递。
事件总线是一个中央枢纽,负责接收事件并将其分发给对应的事件处理器。
通过事件总线的使用,可以实现不同组件之间的解耦,使系统更加灵活和可扩展。
事件驱动架构模型的一个重要特点是异步处理。
当事件发生时,系统不会立即进行处理,而是将事件放入消息队列中,由事件处理器按照一定的顺序进行处理。
这种异步处理的方式可以提高系统的响应速度和吞吐量,同时还能够有效地处理突发的大量事件。
在实际应用中,事件驱动架构模型可以应用于各种场景。
例如,在电商系统中,可以将用户下单、支付完成等事件作为触发点,通过事件驱动的方式来更新订单状态、生成物流信息等;在物联网系统中,可以将传感器数据上报、设备状态变化等事件作为触发点,通过事件驱动的方式来进行实时监控和控制。
事件驱动架构模型的优势在于其灵活性和可扩展性。
由于事件和事件处理器之间的解耦,系统可以更加容易地进行扩展和修改。
例如,当需要新增一种事件类型时,只需要新增对应的事件处理器即可,而不需要改动其他组件。
这种灵活性使得系统更加容易进行维护和升级。
然而,事件驱动架构模型也存在一些挑战和考虑因素。
首先,事件的顺序和一致性可能会成为一个问题。
由于事件的异步处理,事件处理器的执行顺序可能会受到影响,从而导致系统出现不一致的情况。
其次,事件的传递和处理可能会带来一定的延迟。
如果系统对实时性要求较高,需要谨慎设计事件的传递机制以及事件处理器的执行逻辑。
事件驱动架构的优势与应用场景事件驱动架构(Event-driven architecture)是一种基于事件和事件处理的软件设计模式。
相比于传统的请求响应模式,事件驱动架构具有许多优势,并适用于多种应用场景。
本文将探讨事件驱动架构的优势以及其在不同领域的应用。
一、事件驱动架构的优势1. 异步通信:在事件驱动架构中,组件之间通过发布-订阅模式进行异步通信,使得系统能够更高效地进行消息传递。
各个组件之间的解耦也使得系统更加灵活和可扩展。
2. 分布式系统:事件驱动架构天然适用于分布式系统。
各个组件可以分别运行在不同的节点上,通过事件的传递和处理,实现分布式系统的协同工作。
这种松耦合的设计使得系统更容易进行横向扩展,提高了系统的可伸缩性。
3. 可重用性:通过事件驱动架构,可以将独立的事件处理程序封装成可重用的组件,使得不同的应用可以共享这些组件,提高了代码的复用性和开发效率。
4. 实时性:事件驱动架构对实时性要求较高的应用非常适用。
当一个事件发生时,能够立即触发相应的处理程序,使系统能够及时地响应和处理事件。
5. 容错性:由于事件驱动架构的解耦特性,如果某个组件发生故障或者需要维护升级,整个系统仍然能够正常运行。
这种容错性可以提高系统的可靠性和可用性。
二、事件驱动架构的应用场景1. 物联网(IoT):在物联网领域,大量的传感器和设备通过事件驱动架构进行数据的采集和处理。
当传感器检测到某个事件时,会发布相应的事件消息,由事件处理程序进行处理,例如控制设备的运行状态、发送警报等。
2. 金融领域:在金融交易系统中,事件驱动架构可以实现实时的交易处理和事件监控。
当涉及到交易、支付等重要事件时,可以通过事件驱动架构进行实时的风险控制和预警。
3. 微服务架构:微服务架构是一种基于事件驱动和轻量级组件的系统架构。
通过将一个大型系统拆分成多个小型的服务,每个服务都可以独立部署和扩展。
通过事件的发布和订阅,可以实现各个服务之间的解耦和协同工作。
2.1摄像头V4L2驱动框架分析学习⽬标:学习V4L2(V4L2:vidio for linux version 2)摄像头驱动框架,分析vivi.c(虚拟视频硬件相关)驱动源码程序,总结V4L2硬件相关的驱动的步骤;⼀、V4L2架构1. 字符类驱动V4L2(V4L2:vidio for linux version 2)摄像头驱动属于字符类驱动,对于⼀般的字符类驱动程序,其编写步骤⼀般分为:1)构造⼀个file_operations: 编写open=drv_open .read=drv_read2)注册设备,告诉内核:register_chrdev(主设备号,名字,&file_operations)3)⼊⼝函数:调⽤register_chrdev4)出⼝函数:卸载对于复杂的字符类驱动程序,其程序是⼀种分层结构。
例如LCD驱动程序。
如下图所⽰。
--> 上层为核⼼层(内核已经做好的),在fbmem.c中,主要的作⽤为:1)构造file_operations(open read write 函数);2)注册;3)⼊⼝、出⼝。
--> 硬件相关层(⽤户需要做的),供核⼼层的file_operations调⽤,主要完成:1) 分配⼀个fb_info 结构体;2) 设置fb_info 结构体等;3) 注册;4) 硬件相关的操作。
2. V4L2驱动架构由以上字符类设备驱动架构可知,摄像头驱动也是分层结构的。
其中,ucv_driver.c中,定义了uvc_driver结构体,根据ucv_ids查找匹配的设备,如果⽀持,则会进⼊probe函数1struct uvc_driver uvc_driver = {2 .driver = {3 .name = "uvcvideo",4 .probe = uvc_probe,5 .disconnect = uvc_disconnect,6 .suspend = uvc_suspend,7 .resume = uvc_resume,8 .reset_resume = uvc_reset_resume,9 .id_table = uvc_ids,10 .supports_autosuspend = 1,11 },12 };⼆. vivi.c虚拟视频驱动程序架构由于V4L2驱动程序是⼀种分层架构,⽤户只需要完成硬件相关驱动程序即可。