压电石英称重传感器及其在动态公路车辆称重系统中的应用
- 格式:docx
- 大小:112.89 KB
- 文档页数:10
压电式动态称重传感器优化方法研究作者:崔啸华,等来源:《中小企业管理与科技·上中下旬刊》 2015年第2期崔啸华1 李浩2 (1.长安大学政治与行政学院;2.西藏民族学院西藏光信息处理与可视化技术重点实验室)摘要:目前我国所使用的动态汽车衡对重车行车速度和行驶状态十分敏感,针对这一问题,利用压电石英传感器的电敏特性,通过研究其布局,利用改进型Cebon 算法对传感器的布局进行了优化。
结果表明:优化后的传感器对重车行驶速度及行驶状态的敏感度下降了40%。
关键词:道路工程重载公路压电石英传感器动态称重0 引言随着我国经济跨越式发展,汽车保有量与日俱增,特别是货运汽车,增量尤为明显。
据统计2014 年我国各类货运汽车销量突破300 万量。
这种井喷式的增长所引起的直接问题就是道路的拥堵。
例如2014 年9-12 月京藏高速堵车达90 天以上,堵车带来的经济损失甚至超过了货运成本。
导致这种现象的原因很多,最主要的有:路网设置不合理、道路资源匮乏、公路管理自动化程度低等。
对于前两种问题的解决方法只能通过政府部门长期不间断的加大基础设施建设去克服,而对于公路管理的问题可以通过科学的方法进行改进。
目前重车拥堵的很大原因在于收费站点效率低,一辆重车进入收费站点进行称重收费,在无纠纷的情况下至少需要20分钟。
部分地区使用弯板式动态汽车衡,因其对重车行驶状态和速度较为敏感,因此通过速度较低,且容易发生纠纷。
因此如能找出一种称量精度高且对重车过称速度和状态不敏感的动态汽车衡就显得意义重大。
1 称重传感器的选取传统的动态汽车衡主要依靠形变对惠斯顿电桥产生的倾斜大小来得到重量的,如果重车的行驶状态在过秤时突然改变,如突然加速或减速,对称量结果影响很大,因此稳定性较差。
压电传感器是基于压电材料的压电效应来测量汽车质量的,这种传感器利用压电材料的单方向受力敏感特性,当车轮通过其表面时会产生电荷,且具有只对一种方向的受力敏感的特性,石英SiO2 是一种天然的压电材料,当其表面受到外力作用时便会产生电荷,用于制造压电石英动态汽车传感器的石英晶体需要置于高温、高压(1000bar,400℃)下培养一周,再利用光学晶体测角仪测量出其晶体的方向,不同晶体只对一种方向的受力敏感。
第27卷第8期2006年8月仪器仪表学报Chinese Journal of Scient ific InstrumentVo l127No18A ug12006车辆动态称重技术*程路张宏建曹向辉(浙江大学工业控制技术国家重点实验室杭州310027)摘要随着公路运输业和商业贸易的发展,车辆动态称重技术已成为车辆载荷测量的关键技术和发展方向。
文中对车辆动态称重系统的结构和弯板、压电传感器、单传感器及光纤传感器4种常用的动态称重传感器进行了介绍,并对系统产生的轴重信号进行了分析,重点讨论和研究了算术平均、神经网络、系统辨识等运用到车辆动态称重系统中的算法,并且阐述了今后的发展趋势。
关键词动态称重传感器轴重信号处理汽车中图分类号T P273.5文献标识码A国家标准学科分类代码510.8040Vehicle weigh-in-motion technologyCheng Lu Zhang H ong jian Cao Xiang hui(N ational key Labor ator y of I ndustr ial Contr ol T echnol ogy,Zhej iang Univers ity,H angz hou310027,China)Abstract A long w ith the development of the highw ay transpo rtation and trade,vehicle w eigh-in-m otion be-comes the key techno logy and the trend o f measuring traffic loads1T he paper presents the structure of vehicle WIM system and four ty pes of commo nly used WIM sensors:bending plate,piezoelectric sensor,load cell and fiber optic sensor1T he output signal of ax le load in the WIM sy stem is analyzed1Sever al alg orithm s used in veh-i cle WIM system,such as arithmetic averaging,neural netw ork and sy stem identification are deeply dis-cussed1The future trend for WIM is also described.Key words w eig h-in-motion sensor ax le load sig nal pro cessing vehicle1引言车辆的负荷对公路和桥梁的设计有着十分重要的意义。
称重传感器及其应用一、称重传感器介绍(一)简介室称重传感器实际上是一种将质量信号转变为可测量的电信号输出的装置。
用传感器应先要考虑传感器所处的实际工作环境,这点对正确选用称重传感器至关重要,它关系到传感器能否正常工作以及它的安全和使用寿命,乃至整个衡器的可靠性和安全性。
在称重传感器主要技术指标的基本概念和评价方法上,新旧国标有质的差异。
主要有S型、悬臂型、轮辐式、板环式、膜盒式、桥式、柱筒式等几种样式。
(二)称重传感器的分类称重传感器按转换方法分为光电式、液压式、电磁力式、电容式、磁极变形式、振动式、陀螺仪式、电阻应变式等8类,以电阻应变式使用最广。
1.光电式包括光栅式和码盘式两种。
光栅式传感器利用光栅形成的莫尔条纹把角位移转换成光电信号(图2)。
光栅有两块,一为固定光栅,另一为装在表盘轴上的移动光栅。
加在承重台上的被测物通过传力杠杆系统使表盘轴旋转,带动移动光栅转动,使莫尔条纹也随之移动。
利用光电管、转换电路和显示仪表,即可计算出移过的莫尔条纹数量,测出光栅转动角的大小,从而确定和读出被测物质量。
码盘式传感器(图3)的码盘(符号板)是一块装在表盘轴上的透明玻璃,上面带有按一定编码方法编定的黑白相间的代码。
加在承重台上的被测物通过传力杠杆使表盘轴旋转时,码盘也随之转过一定角度。
光电池将透过码盘接受光信号并转换成电信号,然后由电路进行数字处理,最后在显示器上显示出代表被测质量的数字。
光电式传感器曾主要用在机电结合秤上。
2.液压式在受被测物重力P作用时,液压油的压力增大,增大的程度与P成正比。
测出压力的增大值,即可确定被测物的质量。
液压式传感器结构简单而牢固,测量范围大,但准确度一般不超过1/100。
3.电容式它利用电容器振荡电路的振荡频率f与极板间距d 的正比例关系工作(图6 )。
极板有两块,一块固定不动,另一块可移动。
在承重台加载被测物时,板簧挠曲,两极板之间的距离发生变化,电路的振荡频率也随之变化。
科技信息1.选地苗圃地应选择地势较平坦、土层肥沃、灌溉方便、无病虫危害史、土壤的通透性良好,最好选择固定、半固定沙地或覆沙地。
2.整地紫穗槐育苗,对土壤要求不严,一般土地均可作为育苗地。
常用大田播种,土地经过施肥、翻耕、耙平,用耧播种。
3.做床深耕20-30厘米,苗床宽1.5-2米。
4.种子处理播种前种子处理方法一般采用两种:(1)温水浸种。
用50℃~60℃的温水,浸泡种子一昼夜,使种皮吸水软化,捞出后用“生豆芽”法进行催芽。
催芽期间,每天用水冲洗1次,待种子大量裂嘴时进行播种。
(2)碾种法。
把种子摊放在石碾上,厚度5-8厘米,边压边翻动,待有六七成的种子已去掉荚皮或破荚,用温水浸种24小时左右,有三分之二的种子吸水膨胀后捞出来,放在室内或温暖的地方,按前一种方法进行催芽。
5.播种(1)先开沟播种后浇水,两天后土壤不粘时耙一遍,出苗易。
(2)落水播种。
先将床内耙松的表土刮出去放在床外,然后向床内放水,待水快渗完时将种子均匀撒在床内,再将刮放在一旁的土覆盖在上面。
覆土厚度一般为1-2厘米。
6.施肥每亩用硫酸亚铁10-15公斤,过磷酸钙40-50公斤,尿素或二铵30-40公斤。
7.苗期管理苗木生长期灌水2-4次,每次灌水可追施尿素5-8公斤,灌水后要及时松土除草。
8.起苗起苗时应保证苗木不受损伤,要使苗木根系完整,及时包捆装运,不能及时装运的,要临时进行假植。
参考文献[1]卢宗凡,谢永生,王继军.陕北生态环境建设特点与典型模式分析[J].水土保持研究,2003,10(4).[2]李庆录,金小平.沙棘种植技术及其资源开发与利用[J].农业科技与信息,2012,(13):33-34.[3]戴荣强.沙棘植苗造林技术要点[J].科技园地,1999(3):31-31.[4]张青喜,徐丽梅.多用途植物——紫穗槐[J].中国林业,2010(10): 35-35.[5]谢力文.紫穗槐造林技术要点[J].安徽林业,2003(5):9-9.[6]王海江,李安辉.干旱地区雨季造林的有利因素和造林技术[J].当代生态农业,2012(1):67-68.此方法更多地应用于低湿地区,如河边、沟塘等土壤含水量高的地区。
国道石英式非现场科技治超系统设计方案2019年1月目录一、概述.................................................................................................... 错误!未指定书签。
二、设计依据............................................................................................ 错误!未指定书签。
三、设计目标............................................................................................ 错误!未指定书签。
四、非现场执法系统方案设计................................................................ 错误!未指定书签。
4.1需求分析...................................................................................... 错误!未指定书签。
4.2系统技术参数.............................................................................. 错误!未指定书签。
4.3非现场执法系统组成.................................................................. 错误!未指定书签。
4.4系统布局图.................................................................................. 错误!未指定书签。
动态称重系统集成及车型识别方法研究许凯泉,马俊(江西省交通科学研究院,江西南昌330200)摘 要:随着交通事业的迅猛发展及汽车保有量的增加,公路运输车辆超载超限现象也越来 越普遍,严重影响桥梁结构安全,降低公路使用寿命,给正常交通秩序带来了极大的安全隐 患。
针对道路运营管养中迫切的实际需求,本文基于动态精确称重技术对动态称重系统集成、 车辆分类及车型匹配识别方法展开研究,并提出了一种改进的、更精确快速的车型数据匹配方法。
关键词:动态称重;系统集成;荷载;车辆参数;数据匹配0前言由于车辆超限超载现象的普遍存在,对社会、经济、环境以及道路安全都造成严重影响。
国内许多机构一直在研究一种精度高、误差小、通行速度快的动态称重系统,目前国内在高速公路上应用非常广泛的动态称重系统(Weigh in Montion,简称WIM ),依然存在称重误差较大的问题,容易造成收费站拥堵,大大降低了高速公路的服务水平,因此亟需研究开发更高精度的动态汽车称重系统°1动态称重系统组成传统的固定超限超载检测站已经不能满足现今治理超限的要求,动态称重系统可以在车辆正常行驶情况下,对车辆进行车牌识别及称重,但是对车辆的通行速度有一定的限制,因此随着交通量的增长,人工收费站经常会出现因交费堵车现象,于是我们不由得联想到采用稳定的压电石英传感器,利 用计算机采集技术与集中收费数据处理,从而达到快速、稳定、准确地完成缴费的目的。
此类动态称重系统的实施在提高高速公路收费效率、方便用户快 捷通行、提升行业服务形象、减少环境污染等方面起到了重要的作用。
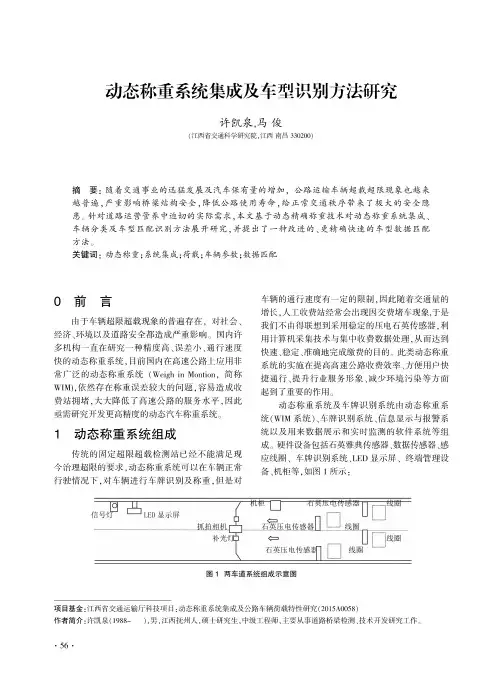
动态称重系统及车牌识别系统由动态称重系统(WIM 系统)、车牌识别系统、信息显示与报警系统以及用来数据展示和实时监测的软件系统等组成。
硬件设备包括石英雅典传感器、数据传感器、感应线圈、车牌识别系统、LED 显示屏、终端管理设备、机柜等,如图1所示:图1两车道系统组成示意图项目基金:江西省交通运输厅科技项目:动态称重系统集成及公路车辆荷载特性研究(2015A0058)作者简介:许凯泉(1988-),男,江西抚州人,硕士研究生,中级工程师,主要从事道路桥梁检测、技术开发研究工作°・56・1.1系统工作流程(1)车辆驶入检测区域时,依次通过前地感线圈、石英压电传感器、后地感线圈、石英压电传感器遥(2)当车辆经过前地感线圈时,触发动态称重开始称重,同时触发相机进行抓拍°(3)在车辆经过检测区域后,动态称重数据处理器将采集到的数据进行自动识别处理,计算出该车的整车重量、车速、轴载、车型、偏载等信息,通过数据接口发送至系统软件。

公路治超非现场执法系统解决方案山西恒信基集团有限公司2019年4月目录第一章、非现场执法系统解决方案概述 .................................................- 1 -一、方案简介...................................................................................- 1 -二、项目点位...................................................................................- 2 -三、非现场执法系统简介 ..................................................................- 7 -四、系统功能.....................................................................................- 8 -五、系统构成图.................................................................................- 9 -六、系统框架图............................................................................... - 10 -七、系统流程图............................................................................... - 11 -第二章、非现场执法系统组成 .............................................................. - 12 -一、高速动态称重子系统 .............................................................. - 14 -1、石英称重传感器 .................................................................... - 14 -2、电荷放大器 ............................................................................ - 16 -3、称重处理器 ............................................................................ - 17 -4、车辆分离线圈 .......................................................................... - 18 -5、数据集成控制柜 ...................................................................... - 18 -二、智能车牌识别子系统 .............................................................. - 20 -1、概述 ........................................................................................ - 20 -2、系统主要特点 ........................................................................ - 22 -3、系统主要构成 ........................................................................ - 25 -三、视频监控子系统...................................................................... - 29 -1、一体化智能球机 .................................................................... - 29 -四、信息发布子系统...................................................................... - 30 -1、概述 ........................................................................................ - 30 -2、系统主要构成 ........................................................................ - 30 -五、软件管理子系统...................................................................... - 31 -1、软件管理子系统构成 ............................................................ - 31 -2、软件子系统功能 .................................................................... - 32 -13、采集软件处理流程图 ............................................................ - 34 -管理平台子系统............................................................................... - 35 -1、系统概述 ................................................................................ - 35 -2、系统流程图 ............................................................................ - 37 -3、系统框架图 ............................................................................ - 38 -4、数据库管理功能界面图 ........................................................ - 39 -5、过车数据报表输出功能界面图 ............................................ - 40 -6、输出并打印执法单据功能界面图 ........................................ - 41 -六、外轮廓尺寸检测子系统 .......................................................... - 42 -1、系统原理 ................................................................................ - 42 -2、系统概述 ................................................................................ - 43 -3、系统功能 ................................................................................ - 43 -4、系统解决方案 ........................................................................ - 44 -5、系统演示图 ............................................................................ - 45 -6、系统案例图 ............................................................................ - 46 -七、监控指挥中心子系统 .............................................................. - 47 -1、系统构成 ................................................................................ - 47 -2、系统效果图 ............................................................................ - 48 -3、系统概述 ................................................................................ - 49 -4、系统功能 ................................................................................ - 49 -5、系统设备 ................................................................................ - 50 -八、信息告知子系统...................................................................... - 53 -1、系统概述 ................................................................................ - 53 -九、路面施工................................................................................. - 53 -1、路面施工规范 ........................................................................ - 53 -十一、安装、防雷 ........................................................................... - 56 -1、防雷接地方案 ........................................................................ - 56 -2、供电电缆及防护 .................................................................... - 57 -3、接地设施 ................................................................................ - 57 -24、网络线 .................................................................................... - 58 -5、信号电缆 ................................................................................ - 58 -6、电力电缆 ................................................................................ - 59 -7、单模光缆 ................................................................................ - 60 -第三章、参考依据................................................................................. - 62 -3第一章、非现场执法系统解决方案概述一、方案简介公路货运车辆超限超载运输问题已成为危害公路交通可持续发展的“痼疾”,近些年来,全国各级政府不断加大治理公路车辆超限超载运输的力度,取得了重要的阶段性成果。
基于DSP的动态称重系统设计作者:潘若禹来源:《现代电子技术》2010年第13期摘要:通过分析目前国内外使用的动态称重系统(WIM)存在的问题,选择石英压电称重传感器作为动态称重传感器,并采用TMS320C6416的DSP核心器件设计并实现了相应的动态称重系统,利用Delphi完成了该动态称重系统的软件设计。
该系统克服了传统动态称重系统测量精度低、所需时间长等缺点,通过实测表明该系统运行良好,应用前景广泛。
关键词:动态称重系统; 石英压电称重传感器; TMS320C6416; 称重软件中图分类号:TP274 文献标识码:A文章编号:1004-373X(2010)13-0183-04Design of Dynamic Weigh-in-Motion System Based on DSPPAN Ruo-yu(Department of Communication Engineering, Xi’an Post & Telecommunication College, Xi’an 710121, China)Abstract: The piezoelectric quartz weighing sensor is selected as a weigh-in-motion (WIM) sensor for solving the problems of WIM used at home and abroad. The WIM system is designed and realized by adopting the DSP kernel device of TMS320C6416, and the software design of WIM system is completed by Delphi. The WIM system overcomes shortcomings of the traditional WIM system, such as low-precision and long time. The simulation results show that the WIM system has good operation and wide application foreground.Keywords: weigh-in-motion system; piezoelectric quartz weighing sensor; TMS320C6416; weighing software0 引言交通运输业的发展对国民经济建设起到了积极的推动作用,但是我国公路运输车辆超限超载现象极为普遍,在严重的地区,几乎所有的货运车辆都存在不同程度的超限超载行为。
集成化应变称重系统研究与应用作者:路新一来源:《中国科技纵横》2014年第12期【摘要】根据震动的瞬时非线性特点,提出采用振动信号的本征模函数对实测信号进行特征频带识别。
根据压力弹性传感器分布,确定应变片的的分布区和具体位置,组成差动全桥电路,提高了偏载精度。
对提取后的信号进行计算后能得到准确的轴重值。
【关键词】动态称重信号处理集成化称重板频率响应因货运卡车超载而导致公路路面严重损坏的报道经常见诸报端,在国内存在矿产资源的地方在某些国道主干线以及主要承载大宗货物运输的公路上,车辆超载运输对路桥基础、交通安全设施造成了极大的危害。
50%的特大交通事故与超载有直接关系,70%的道路安全事故是由于车辆超载引发的。
针对日益严重的公路车辆超载状况,交通部2000年以2号令形式颁布了《超限运输车辆行驶公路管理规定》,对超载现象进行治理。
目前获取车辆重量信号的常用动态称重传感器主要有:压电薄膜式、电容式和弯曲盘式。
本项目旨在研制一种通过车轮将重量传递给称重装置,高精度动态称重。
可置于任意路面,操作简单、便于稽查、随时测量。
集成化应变称重系统是动态称重系统的核心部分,其中动态响应、偏载精度特性直接决定整个动态称重系统的工作性能与测量精度。
该集成化动态称重仪的设计要求有:(1)轮胎作用在称重仪上时,应变片测量区的所有应变总和误差控制在允许的1%内。
(2)能通过测量分析动态车轮作用力,估算出车辆的车速、质量等。
(3)有一定的超载冗余度。
1 集成化动态称重仪设计集成化称重仪的工作原理,是通过传感器弹性变形将载荷检测出来,再通过数据采集卡采集信号,将采集后的信号送至处理器TMS320处理,最后显示车辆的静态载荷。
该称重系统采取双通道数据采集。
称重板传感器也是弹性元件,对传感器应变产生的电压信号进行采集,材料的选择对测量精度有着重要的影响,同时要对称重仪的高度作要求,以减少高度引起的静态质量误差。
设计系统如图1所示。
其中核心处理器TMS320,采用新的C54X+CPU,拥有40位算术逻辑运算单元,其17*17位并行乘法器与40位专用加法器相连,非常适合数据吞吐量大的动态称重系统。
压电石英称重传感器及其在动态公路车辆称重系统中的应用一、概述尽管早在1908年Pierre (皮埃尔)和Jacguse Curie (雅克卡里)就发现了石英晶体的压电效应, 但是用于动态力的测量还是20世纪60年代。
当时由苏黎世的瑞士联邦技术研究所研制出压电石英测力传感器,并利用它制成风洞天平,对空气动力进行测量。
瑞士联邦工学院和德国Aachen大学分别利用石英晶体研制出刚性非常好的三分量测力传感器,用来测量机床的切削力。
20世纪70年代扩展了压电石英三分量测力系统,用来测量六个分量和计算力作用点的座标;军事工程部门用于测量火箭推力向量(力的大小、方向和位置);汽车工业部门用于测量轮胎的附着力;生物力学领域用于运动矫形术、整形和姿态控制。
20世纪80年代在汽车制造业中压电石英测力传感器用于测量汽车点火压力,汽车碰撞的冲击力。
利用二分量测力传感器同时测量汽车检测平台的垂直力和水平力,将压电石英测力传感器埋在路面下,测量汽车轮胎与路面之间的接触力。
20世纪90年代公路车辆轴载超限越来越严重,已成为世界难题。
在公路车辆轴载超载预判,桥梁超载报警和轴载动态称重计量中,迫切需要体积小、高度低、重量轻,刚度大,固有频率高,动态范围广,灵敏度高的动态称重传感器和动态公路车辆称重系统。
压电石英晶体敏感元件及其组装的压电石英称重传感器就具备上述特点。
瑞士Kistler (奇石乐)公司开发出可以埋在路面下的以石英晶体为敏感元件的工字梁型动态称重传感器,用于公路车辆轴载超载预判,桥梁超载报警,隧道保护和车辆轴载计量,取得了很好的应用效果。
这种压电石英称重传感器已在美国、英国、德国、澳大利亚、韩国、日本等许多国家广泛应用。
1993年7月在苏黎世的瑞士联邦技术研究所,根据欧洲研究项目“ COTS323道路动态称重”的要求,对压电石英称重传感器与另外8个商用称重传感器进行了道路比较试验。
试验使用数字式示波器显示重量信号、并将其储存在软盘上,然后将数据用计算机进行离线分析。
除了车辆的轴重和毛重外,车速、轴距、轮距和单双轮胎等均可确定。
在20〜50km/h速度下,动态称量结果与动态校准结果非常吻合,证明压电石英称重传感器完全可以用于公路车辆轴重计量。
二、石英晶体的压电效应石英晶体(Quartz Crystal )是二氧化硅无水化合物,分子式为Si02,是各向异性的材料,通常用直角坐标轴来表征它的方向性。
典型的石英晶体外形和直角坐标轴如图1所示。
Z轴是石英晶体的对称轴,在垂直于Z轴的平面上,通过相对两棱的直线叫X轴,由于石英晶体呈六角棱形,因此有三个X轴。
与X 轴和Z轴都垂直的是Y轴。
X轴称为电轴,Y 轴称为中性轴(或机械轴)Z轴称为光轴。
通常所说的X(或Y)切割,就是切割出来的石英晶体片的两个平面都与X (或Y)轴相垂直。
X切割的石英晶体片如图2所示。
图1石英晶体当石英晶体片沿X轴方向受一外力作用时,内部产生极化,在垂直于X轴的两个平面上产生等量的正负电荷,这种现象称为纵向压电效应。
而在垂直于Y轴的平面上,沿着Y轴的方向施加外力时,在与X轴垂直的平面上产生电荷,这种现象称为横向压电效应。
在Y切割(剪切型切割)石英晶体片中,当在垂直于Y轴的平面内,沿X轴方向受外力作用时,在受力表面产生电荷,这种现象称为剪切效应。
石英晶体的压电效应是由于在外力作用下石英晶体内的硅原子和氧原子的位置产生相对变形,正电荷和负电荷的重心互相移位所至,产生的电荷由覆盖在石英晶体表面的电极板进行收集、传输。
力值的计量就是直接利用这三个压电效应,制成单分量或多分量测力与称重传感器。
图2 X切割的石英晶体片三、压电石英称重传感器的工作原理压电石英称重传感器是利用石英晶体的纵向压电效应将重量信号转换成电信号的装置。
现以一个X切割的石英晶体圆片为例,计算它的电荷、电压。
石英晶体圆片如图3所示。
设石英晶体圆片直径为d,厚度为t。
当石英晶体圆片沿X轴方向受外力F x作用时,在垂直于F x的平面上产生电荷,而且其外力与产生的电荷存在线性关系。
Q d ii F x式中:Q—石英晶体圆片垂直于Fx平面产生的电荷d ii—石英晶体的纵向压电模数,d ii=2.31PC/N 两个表面之间的电压匕为:U<=C X/C x=d ii F x/C x式中:C<—石英晶体圆片的电容量2C<= en d /4t£ —石英晶体的介电系数。
将X切割的石英晶体片加工成称重传感器壳体所需要的外形和尺寸,按要求连同电极板一起装入壳体内,施加足够的预紧力后,采用圆膜片与壳体焊接密封。
当称重传感器受外载荷作用时,石英晶体圆片产生电荷,由电极板收集传至信号输出插座,再由低噪声的同轴电缆传输到电荷放大器(带有电容反馈的运算放大器),经灵敏度归一化后,按比例的转换成电压输出。
或放大器为重量信号的模拟一数字转换提供必要的驱动,并将此信号传输到计算机,然后用专用的软件将其转换为重量。
为了减小电荷的泄漏,放大器的输入端要有很高的绝缘电阻,通常要求大于10T Q。
电荷放大器(C)(V)(F)图3石英晶体圆片受力图的量程(与转换系数有关)由反馈电容确定,通常称为量程电容。
通过测得的电压值,就可得到所测载荷的大小。
利用石英晶体制造称重传感器时,石英晶体片有并联和串联连接两种方法。
并联连接:两个压电石英晶体片按极化方向相反粘结,负电荷集中在中间的负电极板上,正电荷在两端的正电极板上。
这时相当于两个电容器并联,输出电极板上的电荷和电容量将增加一倍,如图4所示。
图4两个石英晶体片并联示意图如果有n个石英晶体片按并联方式连接,此时的总输出电荷将增加n倍,电荷灵敏度也增加n 倍,而电压灵敏度则与单个石英晶体片工作时相同。
nQ X=nd ii F x串联连接:两个石英晶体片按极化方向相同粘结,于是在两个石英晶体片粘结处的中间电极板上正负电荷相互抵消,这时总电容量为单个石英晶体片工作时的一半,电压都增大一倍,而总电荷量则不变,如图5所示。
若n个石英晶体片串联连接,由于输出电压增加n倍,因此电压灵敏度也增加n倍,而电荷灵敏度则与单个石英晶体片工作时相同。
由此可得出,多个石英晶体片并联连接时,输出电荷量大,电荷灵敏度高;串联连接时,输出电压大,电压灵敏度高。
四、压电石英称重传感器的结构与特点单分量压电石英称重传感器的结构象一个承载垫圈,圆片,夹在两个圆片之间的电极板,带有密封膜片的上压头和信号输出插座组成,如图个石英晶体片并联所产生的电荷为:(C)由带底座的外壳,两个X 切割的石英晶体6 所示。
1石英晶体片2.电极板 3.上压板4.外壳5.信号输出插座图6 压电石英称重传感器结构图石英晶体的排列为以其晶轴X指向电极板的并联连接,使其在外载荷作用下产生的电荷和灵敏度都增加一倍。
在装配时,必须对石英晶体圆片施加足够的预紧力,就是在较高的预紧力下使上压板与外壳成为一个坚实的整体,上压板的膜片与外壳采用电子束焊或激光焊对石英晶体圆片进行密封和保持预紧力。
密封膜片必须具有柔软的线性弹簧特性。
对石英晶体圆片施加预紧力进行装配时应作到:预紧力必须垂直于称重传感器表面;在石英晶体圆片上产生的应力应尽量均匀分布;预紧元件的刚度应远远小于称重传感器的刚度以保持较高的灵敏度。
将石英晶体敏感元件与电阻应变计进行比较,不难得出,电阻应变计实际上是测量称重传感器弹性体上的应变,而不是测量外力。
在具体设计时必须使额定载荷下弹性体上产生的应变大小适当,即1100口&左右。
实际上电阻应变计在弹性体上测量的是一个或几个位置上的表面应变值。
表面应变是否代表弹性体每一种受载状态下的平均应变,取决于设计技术水平。
应变式称重传感器的固有缺点在动态称重中受到较多限制:测量范围小,对于10的几次方的测量范围必须用多个不同量程的称重传感器进行测量;量程与鉴别阈之比通常被限制在50000以下;弹性体结构较复杂;刚度偏小,固有频率低;使用温度范围小,一般为-10 C〜60C。
相对压电石英称重传感器唯一的优点是可以进行绝对测量和静态称重,特别是非常适用于精确称重。
与电阻应变计不同,石英晶体敏感元件测量的是应力,是它产生的电荷对于应力的平均值,也就是说石英晶体具有把敏感元件(石英圆片)整个表面上的载荷进行积分的能力。
压电石英称重传感器与应变式称重传感器的最大区别是石英晶体没有热电效应,即使是温度瞬变也不会引起信号漂移,而且灵敏度温度系数非常小,约为-0.02% C,因此不必采取特殊手段补偿路面温度的影响。
而应变式称重传感器则必须进行零点和灵敏度温度补偿。
垫圈式压电石英称重传感器一般有额定量程为100、200、500kg, I、2、5、10、20、50、100t十种规格。
灵敏度均为40pc/kg , 固有频率\40KHz线性度W1%FS绝缘电阻》10TQ,50t 的压电石英称重传感器的重量只有I00g。
压电石英称重传感器具有如下特点:①量程范围广,测量范围达10的几次方,一个称重传感器即可完成全量程测量,频率响应范围能在低至接近零周,高达十千周范围内工作;②量程与鉴别阈之比可达100000000, —般比值超过1000000。
灵敏度高,测量值可到上百吨载荷,又能分辨出小至几公斤的动态力;③刚度大,固有频率高(几十千赫以上),是同尺寸应变式称重传感器的8 倍,动态响应快;④时间老化率低,无热释电现象,工作可靠性高,寿命长;⑤石英晶体的居里点高(573C),对温度的敏感性低,灵敏度变化极小,长期稳定性好;⑥石英晶体具有较好的线性,在一般情况下无滞后,组装成称重传感器其动态测量的综合误差优于1%⑦结构紧凑,体积小,高度低,重量轻,可用多个石英晶体片组装大型称重传感器;⑧用多分量称重传感器进行称重计量时,抗交叉干扰能力强,交叉干扰达到800Hz 时,测量误差仍然低于10%交叉干扰到400Hz时,测量误差小至2%以内;⑨使用温度范围广,通常为-200 C〜200C;⑩在使用时不用事先调整平衡,操作方便。
唯一的缺点是不能在长时间内进行静态测量。
五、压电石英称重传感器在动态公路车辆称重中的应用石英晶体敏感元件及压电石英称重传感器在动态公路车辆称重中的应用主要有两种方式。
一种是利用多个垫圈式压电石英称重传感器组装成薄形电子轮重、轴重秤或条形称重板。
一种是利用多个石英晶体片和电极板直接安装在特制的梁式承载器内,形成专用的压电石英称重传感器,将其埋在公路表面截面为50X50mm的长槽内,形成动态公路车辆轴重秤。
瑞士Kistler (奇石乐)公司研制的石英晶体动态称重传感器就是这种应用的典型代表。
它的总体结构如同1m长的工字梁,所不同的是工字梁的腹板为圆形空心截面,实际上其空心是由平行于工字梁上下翼缘的两个平面形成的矩形通孔,它的结构如图7所示。