ABB闸控
- 格式:doc
- 大小:28.50 KB
- 文档页数:1

ABB盘式制动器系统液压站设置说明(仅供参考)原稿:ABB (3ASM 62H 010) 翻译:北京恩菲电气科技有限公司李伟时间:二〇〇五年十月十七日目录1、概述: (1)2、阀设置: (1)3、更换部件: (1)步骤2a:阀132的设定 (1)步骤3:液压泵的设定,液压图中编号为 6 (2)步骤4:减压阀11的设定 (2)步骤5:减压阀25的设定 (2)步骤6:阀37的设定 (2)步骤7:减压阀16的设定 (2)步骤8:蓄能器的检查 (2)步骤9:阀9 的设定 (2)步骤10:流量控制阀17 的设定 (2)步骤11:压力开关35 的设定 (3)步骤12:压力开关34 的设定 (3)液压站设定值列表: (3)1、概述:该部分内容参照了手册3ASM62L005中的“液压站的调试和维护说明”。
以下是对矿山提升机所使用的盘式制动器的液压站的设置步骤的说明。
当对液压阀或其它部件进行更换时,该部分内容也是非常有用的。
本文中所用到的符号的含义如下所述:= 阀关闭= 阀打开= 电磁阀动作= 电磁阀释放= 电磁阀从动作状态切换到释放状态阀32、37、39、40 处于(除非有其它规定)阀18、27 处于(除非有其它规定)2、阀设置:在液压站调试时,应按下面所述步骤进行。
其中涉及到的压力值PB(稳态压力)可以在提升机计算数据表中找到。
一般来讲,压力设定值都可以通过压力表14A来看到。
在安装过程中应建立一个设定值列表,可以按本部分内容最后的表格来填上数据即可。
调试完成后,必须进行制动性能的测试。
不同的摩擦系数和不同的负载条件都会导致减速性能的改变。
那么,必须根据新的条件来重新计算一个新的PB值,相关的阀也必须重新设置。
最终,如果PB值调整的好的话,将可以提供现行规章所要求的减速性能(通常最小为1.5m/s2)3、更换部件:对于已经调试好的液压站,如果更换液压阀或其它部件,那么它们的设置必须按照相关部分的详细步骤来进行。

使用Mint Workbench 设置ABB 运动驱动器使用调试向导在数分钟内完成设置介绍本应用说明的目的,是对ABB 运动驱动器配合交流伺服电机运行,并在“调节”后达到可能的最佳性能所需的步骤进行说明。
虽然对感应电机参数做了部分引用,但有单独的应用说明讨论感应电机的设置和调节。
MicroFlex e190和MotiFlex e180运动驱动器MicroFlex e190和MotiFlex e180是精密的伺服驱动器。
它们被设计用于满足分散型单轴智能解决方案和集中型多轴系统的需要,以便宜的价格提供更高性能。
它们为许多机械应用提供了理想的解决方案,也是机械制造商和系统集成商的理想部件。
在本应用说明中,我们将描述MotiFlex e180的调试过程。
该过程对MicroFlex e190驱动器几乎完全相同。
因此,除非另有说明,本文件中提到MotiFlex e180的地方一般也可用于MicroFlex e190。
所需设备:-运行最新固件的MotiFlex e180伺服驱动器,安装了正确的反馈选件模块-带增量式编码器、SSi 、EnDat 、SinCos 、Hiperface 、SmartAbs 、Resolver 1或BiSS 反馈的BSM 电机-运行Windows 7或者以上版本的PC-使用适当的两端端接的连接器的电机反馈电缆-在电机端有适当的连接器的电机动力电缆-MotiFlex e180的市电电源(如果PHASELOSSMODE 参数设置为0,外形尺寸A 和B 也可使用三相200-480VAC 或单相230VAC 电源)2-以太网电缆1如果使用MicroFlex e190,基于旋转变压器的电机将需要使用旋转变压器适配器OPT-MF-2012如果使用MicroFlex e190,电源应为单相115-240VAC 或三相115-240VAC应用说明使用Mint Workbench调节伺服电机的驱动器 AN00250目录1概述3 1.1推荐的I/O连接3 1.2反馈设备4 1.3电源和电机电源连接5 1.4连接PC52调试向导7 2.1输入应用数据7 2.2查看和修改参数142.2.1修改电机方向142.2.2电机抱闸控制15 2.3理解控制率和控制环16 3电机调节173.1调节前要执行的检查17 3.2初始调节18 3.3无载调节193.3.1测量定子电阻和电感203.3.2计算电流环增益203.3.3测试反馈203.3.4测量电压常量20 3.4有载调节213.4.1测量惯量233.4.2计算速度和位置环增益23 3.5微调233.5.1微调电流环253.5.2在速度伺服配置下微调速度环253.5.3在速度伺服配置下微调位置环273.5.4在转矩伺服配置下微调位置环30 3.6手动调节333.6.1手动调节电流环333.6.2在速度伺服配置下手动调节速度环343.6.3在速度伺服配置下手动调节位置环363.6.4在转矩伺服配置下手动调节位置环374调节中的调试和故障诊断38 4.1调试“测量定子电阻和电感”39 4.2调试电流环的调节39 4.3调节“测试反馈”39 4.4调试“测量电压常量”40 4.5调试“测量惯量”40 4.6机械因素414.6.1惯量失配414.6.2力顺和添加转矩滤波器415完成调试43 5.1进一步支持44应用说明使用Mint Workbench调节伺服电机的驱动器 AN002501概述1.1推荐的I/O连接如果该过程有任何类型的安全要求,则应在驱动器使用两个安全转矩取消(STO)输入。

ABB机器⼈制动闸未释放故障维修ABB机器⼈制动闸未释放故障维修描述:ABB机器⼈开始操作或者⼯作运动时,机器⼈内部制动闸必须松开,才能允许机器⼈移动⼯作。
如果机器⼈的制动闸没有松开,机器⼈不能移动,并且机器⼈的⽰教器上会显⽰很多错误故障的记录信息。
ABB机器⼈制动闸未释放故障维修原因:通常引起机器⼈制动闸没有释放故障可能是由以下原因引起的:ABB机器⼈制动器接触器编号为K44⼯作状态是否正确;机器⼈控制系统⽆法进⼊Motors ON正确的⼯作状态;ABB机器⼈轴上的制动闸出现损坏导致故障发⽣;机器⼈控制器的24V BRAKE供电电源损坏或者是掉电。
ABB机器⼈制动闸未释放故障维修过程:维修中要确保机器⼈制动接触器是被有效激活的,重点是被激活的接触器(编号为K42和K43),两个接触器必须同时激活(接触器就⼀个被激活是⽆法正常⼯作的)。
检查⽰教器上的控制按钮检测机器⼈的制动器是否出现故障(其原理是制动器出现故障,操作按钮也会跟着失去相关的作⽤)。
机器⼈驱动模块电源的24V BRAKE电压是否正常也是很重要的因素。
4. MCCB: S系列塑壳断路器4.1. S1-S7可以提供那些安装方式,·固定式 S1-S7,在型号中用F表示。
·插入式S1-S5 400,在型号中用P表示。
·抽出式S3-S7,在型号中用W表示。
·其中插入式和抽出式分为本体和底座两部分,这两部分必须分别定购。
·固定式的S断路器可以通过ABB提供的插入式或抽出式转换套件,改装成插入式或抽出式的产品。
4.2. S系列断路器可以提供那些常用的接线方式。
·前接线端子,在型号中用F表示。
·加长前接线端子,在型号中用EF表示。
·电缆前接线端子,在型号中用FC表示。
·螺栓后接线端子,在型号中用R表示。
·后水平汇流排接线端子,在型号中用HR表示。
(只有插入式和抽出式提供)·后垂直汇流排接线端子,在型号中用VR表示。
(只有插入式和抽出式提供)·前接线的S断路器可以通过ABB提供的接线端子转换套件,改装成其他接线方式的产品。
4.3. S系列塑壳断路器可以提供的热磁脱扣器的型号· TM热磁脱扣器S1,S2,S3,S5,S6可以安装TM热磁脱扣器。
S1的热过载保护的门限值不可调。
S2、S3、S5、S6的热过载门限值可调,可调范围为0.7-1In,分为3档。
S1、S2、S3的磁脱扣的门限值不可调。
S5、S6的磁脱扣门限值可调,可调范围为5-10In,分为3档。
· M 电磁脱扣器(只有磁脱扣保护,无热过载保护)S1,S2,S3,S5,S6可以安装M磁脱扣器。
S1、S2、S3的磁脱扣的门限值不可调。
S5、S6的磁脱扣门限值可调,可调范围为5-10Ith ,分为3档。
·特殊磁脱扣值的TM或M脱扣器S1、S2、S3的磁脱扣值不可调,但可以提供磁脱扣值为5Ith的产品。
S1、S2、S3、S5、S6可以提供磁脱扣值为3Ith和12Ith的产品。
有关ABB闸控系统工作原理的研究与分析
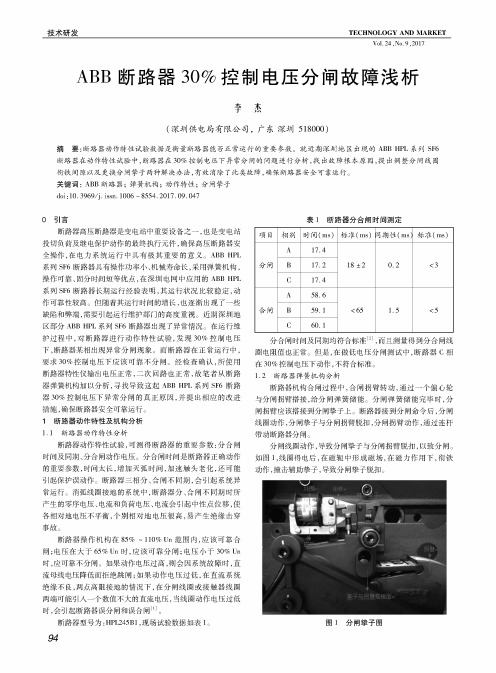
(1)闸系统控制分手动和自动两种控制方式:手动方式操作主要是根据司机的意愿和提升机的松、施闸命令进行控制。
自动方式直接由提升机发出的闸控命令进行松、施闸顺序控制。
(2)当提升机发出松闸命令时,闸控系统让液压站控制阀V32和比例调节阀V37得电,使系统油压上升到8.5MPa.。
提升机进行预松闸;随后系统通过增加比例调节阀V37的电流,让油压在较短的时间内上升到11Mpa.当松闸命令发出一定时间后,通过让控制阀V39得电,使系统油压上升到最大值14.5MPa.,让盘型制动器完全敞开。
提升机进行全速运行;当罐笼到达停车位置附近时,闸控系统通过让控制阀V39失电,使压力下降到11MPa,盘型制动器进行预贴闸。
当罐笼到达停车位置时,提升机发出施闸命令时,比例调节阀V37的控制电流减少,让系统压力下降到8.5MPa.当油压减少到6.5MPa后,比例调节阀V37失电,油压下降到4.5MPa.随后阀V32失电,闸系统压力逐渐减少到零,提升机抱闸停车。
(3)紧急停车时的恒减速制动控制功能:闸控系统的安全回路与提升系统的安全回路相互闭锁,一旦闸控系统出现问题,闸安全回路跳闸,实
障,其安全回路跳闸,作用于闸安全回路,让提升机实施恒减速制动。
恒减速制动由提升机和闸控系统的安全回路继电器、闸控板BCC-1和测速机等进行控制。
闸处理器板AC70通过对液压传感器反馈的系统压力、测速机反馈的提升机的运行速度、压力开关和各种阀的控制,由闸控板给出适合提升机负载的恒减速压力包络曲线,让提升机安全、平稳的以恒定的减速度进行减速停车。
液压站进行恒减速制动时,液压泵停止工作,系统压力下降到一定值时,由蓄能器向液压系统提供压力,确保系统压力的平稳。
由此可见闸控系统与提升机的电控系统是紧密联系在一起的,两者之间的连锁效应保证了提升系统安全可靠的运行。