数控机床反向间隙和定位精度的检测与补偿
- 格式:pdf
- 大小:125.88 KB
- 文档页数:2
设备管理与维修2021翼2(上-下)数控机床定位精度的补偿方法简述闫丽娟(常德纺织机械有限公司,湖南常德415004)摘要:数控机床的定位精度在很大程度上受滚珠丝杠精度影响,提高数控机床的定位精度,能有效地改善数控机床的加工精度[1]。
介绍提高数控机床定位精度的螺距误差补偿方法,并结合实例介绍Sodick LN1W 系统的螺距误差补偿方法。
关键词:数控机床;定位精度;螺距补偿;螺距补偿实例中图分类号:TG659文献标识码:BDOI :10.16621/ki.issn1001-0599.2021.02.590引言数控机床的定位精度在很大程度上受滚珠丝杠精度影响,提高数控机床的定位精度,能有效地改善数控机床的加工精度[1]。
由于数控机床的长期使用,丝杆的磨损在所难免,随着丝杆的螺距误差增大,数控机床的定位精度也会下降。
使用数控系统的“螺距误差补偿”功能,对数控机床的定位精度进行补偿,能有效改善数控机床的定位精度。
数控机床根据加工工件的精度要求,需要定期进行定位精度检测和补偿。
由于每一种数控系统都有自己独特的操作方式,所以“螺距误差补偿”的方法也不一样。
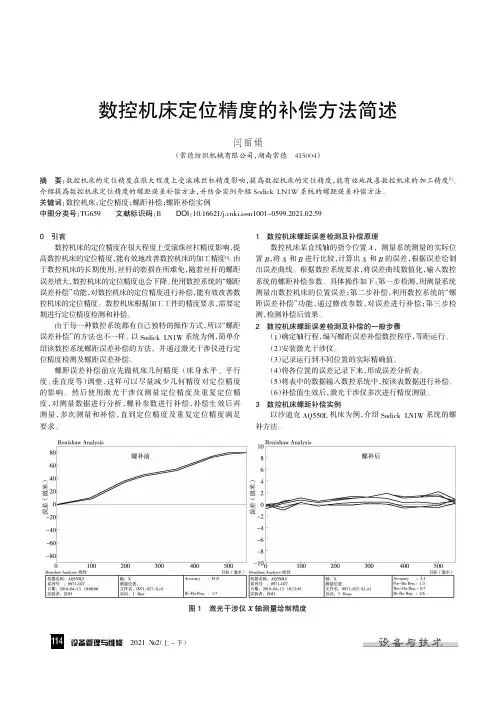
以Sodick LN1W 系统为例,简单介绍该数控系统螺距误差补偿的方法,并通过激光干涉仪进行定位精度检测及螺距误差补偿。
螺距误差补偿前应先做机床几何精度(床身水平、平行度、垂直度等)调整,这样可以尽量减少几何精度对定位精度的影响。
然后使用激光干涉仪测量定位精度及重复定位精度,对测量数据进行分析,螺补参数进行补偿,补偿生效后再测量,多次测量和补偿,直到定位精度及重复定位精度满足要求。
1数控机床螺距误差检测及补偿原理数控机床某直线轴的指令位置A ,测量系统测量的实际位置B ,将A 和B 进行比较,计算出A 和B 的误差,根据误差绘制出误差曲线。
根据数控系统要求,将误差曲线数值化,输入数控系统的螺距补偿参数。
具体操作如下:第一步检测,用测量系统测量出数控机床的位置误差;第二步补偿,利用数控系统的“螺距误差补偿”功能,通过修改参数,对误差进行补偿;第三步检测,检测补偿后效果。
反向间隙的测定及补偿任务内容反向间隙值的测定反向间隙的补偿在数控机床上,由于各坐标轴进给传动链上驱动部位(如伺服电动机) 的反向死区、各机械运动传动副的反向间隙等误差的存在,造成各坐标轴在由正向运动转为反向运动时形成反向偏差,通常称为反向间隙或失动量。
对于采用半闭环伺服系统的数控机床,反向间隙的存在会影响到机床的定位精度和重复定位精度,从而影响产品的加工精度。
若反向间隙太大,经常在加工中出现圆不够圆,方不够方的废品零件。
而FANUC半闭环数控则有相应的系统参数可实现较高精度的反向间隙补偿。
即可实现切削进给和快速进给两种加工模式下的反向间隙补偿功能,从而可以提高轮廓加工和定位加工的精度。
一、反向间隙值的测定在半闭环系统中,系统接收的实际值来自于电机编码器,轴在反向运行时指令值和实际值之间会相差一个反向间隙值,这个值就是反向间隙误差值。
在全闭环系统中,系统接收的实际值来自于光栅尺,实际值中已包含反向间隙,故不存在反向间隙误差。
反向间隙补偿在坐标轴处于任何方式时均有效。
当系统进行了双向螺距补偿时,双向螺距补偿的值已经包含了反向间隙,此时不需设置反向间隙的补偿值。
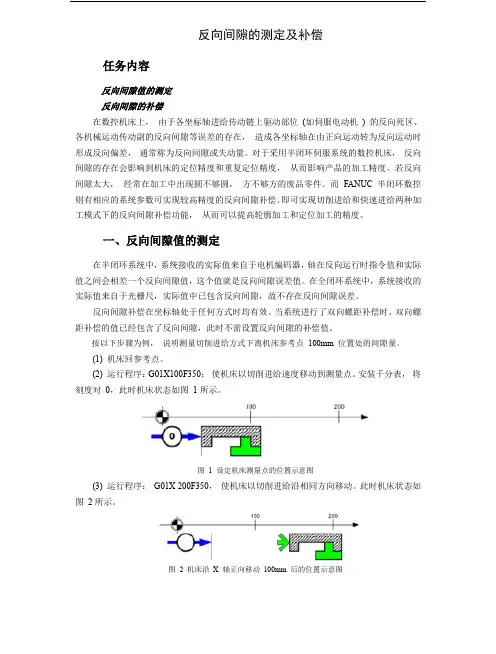
按以下步骤为例,说明测量切削进给方式下离机床参考点100mm 位置处的间隙量。
(1) 机床回参考点。
(2) 运行程序:G01X100F350;使机床以切削进给速度移动到测量点。
安装千分表,将刻度对0,此时机床状态如图1所示。
图 1 设定机床测量点的位置示意图(3) 运行程序:G01X 200F350,使机床以切削进给沿相同方向移动。
此时机床状态如图2所示。
图 2 机床沿X 轴正向移动100mm 后的位置示意图。
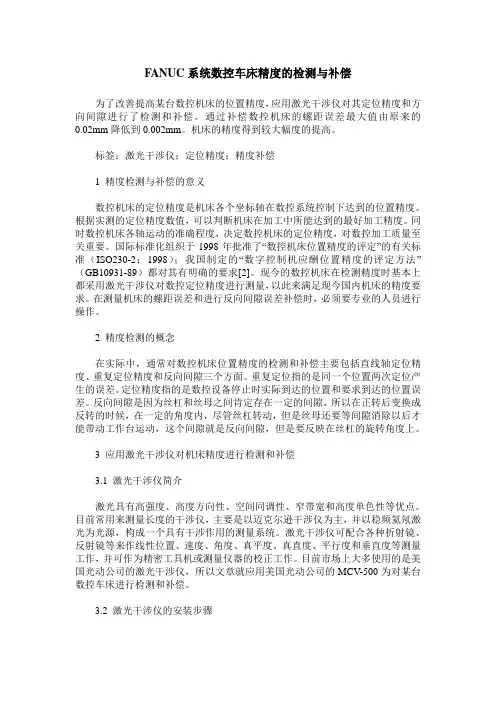
FANUC系统数控车床精度的检测与补偿为了改善提高某台数控机床的位置精度,应用激光干涉仪对其定位精度和方向间隙进行了检测和补偿。
通过补偿数控机床的螺距误差最大值由原来的0.02mm降低到0.002mm。
机床的精度得到较大幅度的提高。
标签:激光干涉仪;定位精度;精度补偿1 精度检测与补偿的意义数控机床的定位精度是机床各个坐标轴在数控系统控制下达到的位置精度。
根据实测的定位精度数值,可以判断机床在加工中所能达到的最好加工精度。
同时数控机床各轴运动的准确程度,决定数控机床的定位精度,对数控加工质量至关重要。
国际标准化组织于1998年批准了“数控机床位置精度的评定”的有关标准(ISO230-2:1998);我国制定的“数字控制机应酬位置精度的评定方法”(GB10931-89)都对其有明确的要求[2]。
现今的数控机床在检测精度时基本上都采用激光干涉仪对数控定位精度进行测量,以此来满足现今国内机床的精度要求。
在测量机床的螺距误差和进行反向间隙误差补偿时,必须要专业的人员进行操作。
2 精度检测的概念在实际中,通常对数控机床位置精度的检测和补偿主要包括直线轴定位精度、重复定位精度和反向间隙三个方面。
重复定位指的是同一个位置两次定位产生的误差。
定位精度指的是数控设备停止时实际到达的位置和要求到达的位置误差。
反向间隙是因为丝杠和丝母之间肯定存在一定的间隙,所以在正转后变换成反转的时候,在一定的角度内,尽管丝杠转动,但是丝母还要等间隙消除以后才能带动工作台运动,这个间隙就是反向间隙,但是要反映在丝杠的旋转角度上。
3 应用激光干涉仪对机床精度进行检测和补偿3.1 激光干涉仪简介激光具有高强度、高度方向性、空间同调性、窄带宽和高度单色性等优点。
目前常用来测量长度的干涉仪,主要是以迈克尔逊干涉仪为主,并以稳频氦氖激光为光源,构成一个具有干涉作用的测量系统。
激光干涉仪可配合各种折射镜、反射镜等来作线性位置、速度、角度、真平度、真直度、平行度和垂直度等测量工作,并可作为精密工具机或测量仪器的校正工作。
数控机床反向间隙的测量及补偿在数控机床的进给传动链中,联轴器、滚珠丝杆、螺母副、轴承等均存在反间间隙。
机床进给轴在换向运动的时候,在一定的角度内,尽管丝杆转动,但是丝杆螺母副还要等间隙消除以后才能带动工作台运动,这个间隙就是反向间隙。
对于采用半闭环控制的数控机床,反向间隙会影响到定位精度和重复定位精度。
反向间隙数值较小,对加工精度影响不大则不需要采取任何措施;若数值过大,则系统的稳定性明显下降,加工精度明显降低,尤其是曲线加工,会影响到尺寸公差和曲线的一致性,此时必须进行反向间隙的测定和补偿。
如在G01切削运动时,反向间隙会影响插补运动的精度,若偏差过大就会造成“圆不够圆,方不够方”的情形;而在G00快速定位运动中,反向偏差影响机床的定位精度,使得钻孔、镗孔等孔加工时各孔间的位置精度降低。
这就需要数控系统提供反向间隙补偿功能,以便在加工过程中自动补偿一些有规律的误差,提高加工零件的精度。
机床在出厂前已仔细的测量了进给系统中的间隙值,并进行了补偿。
随着数控机床使用时间的增长,反向间隙还会因为运动副的磨损而逐渐增加,所以需要定期对数控机床各进给轴的反向间隙进行测量和补偿。
当在数控系统中进行反向间隙补偿后,数控系统在控制进给轴反向运动时,自动先让该进给轴反向运动,然后再按编程指令进行运动。
即数控系统会控制伺服电机多走一段距离,这段距离等于反向补偿值,从而补偿反向间隙。
在不同的速度下测得的反向间隙是不同的,一般低速时的反向间隙值比高速时的反向间隙值在,尤其是在进给轴负荷较大,运动阻力较大时。
所以有的数控系统就提供了低速G01和高速G00两种补偿值。
FANU丝杆反向间隙调整步骤切削进给方式与快速进给方式可设定不同的间隙量。
用此功能可进行更高精度的定位。
相关参数按以下步骤,测量切削进给方式的进给量。
1.回参考点。
2.用切削进给使机床移动到测量点。
(G01 X100 F1000;)3.安装百分表或千分表,将刻度对0。
浅析数控机床坐标轴反向间隙对精度的影响及补偿
数控机床坐标轴反向间隙是指数控机床的导轨与滚珠丝杠副之间的松动。
这种松动和反向运动时导致的误差被称为“反向间隙误差”。
这种误差在加工过程中会影响加工精度和重复定位精度。
1. 反向间隙误差对加工精度的影响
在数控机床加工过程中,由于反向间隙误差的存在,导致执行机构必须反向运动一定距离,才能达到准确的加工位置。
这种偏差会导致工件加工精度下降。
3. 反向间隙误差的补偿方法
为了解决反向间隙误差对加工精度和重复定位精度的影响,需要采取一些措施进行补偿。
常用的方法如下:
(1)空间轨迹补偿
空间轨迹补偿是通过调整机床轨道的轮廓,使得反向运动误差减小或者消除。
这种方法适用于机床结构固定的情况下。
(2)补偿循环
补偿循环可以在程序中加入一些指令,通过反向运动一段距离,再进行正向运动来消除反向间隙误差。
(3)伺服增益调节
通过调节伺服系统的增益参数,可以使反向运动误差减小,从而减少反向间隙误差对加工精度和重复定位精度的影响。
总之,反向间隙误差是数控机床加工过程中影响加工精度和重复定位精度的一个关键因素。
采取合适的方法进行补偿可以有效减少其影响,提高机床的加工精度和重复定位精度。

反向间隙是数控机床使用一段时间后必须要修整的技术参数,其测定及设定方法如下: 将百分表座吸附在工作台上,表头靠在正对主轴外圆面上,左右移动(X向是表头正对主轴侧面,前后移动)找到最高点。
先手轮方式选择Y向(X向)倍率选择X100;
朝正向连续移动三次(0.3mm)后记住当前百分表读数,然后反向移动一次(0.1mm )再读取当前百分表读数,两个值相减后被0.1mm相减得出的至即为当前的反向间隙值;
例如正向走是加表,三此后读数为0.56,反向一次后读数为0.47;那么实际还有反向间隙为:0.1-(0.56-0.48)=0.02mm;
所测得的反向间隙值减去0.01mm后乘1000(三菱是乘以2000)增加到参数中;
例如三菱系统(60S系列和70系列)2011当前值为48,上例测得反向间隙为0.02mm ,补偿时(0.02-0.01)*2000=20;那么2011的新的设定值为68;
设定好参数后最好按一次复位后机床关电后再上电,确保新参数生效。
系统反向间隙参数:
FAUNC(mate)MD:1851;1852;
三菱M64M70:2011;2012
SIEMENS808D828D840D:32450。
数控机床精度测定和补偿方法硕超数控数控机床的位置标准通常指各数控轴的反向偏差和定位精度。
对于这二者的测定和补偿是提高加工精度的必要途径。
一、反向偏差的测定反向偏差的测定方法:在所测量坐标轴的行程内,预先向正向或反向移动一个距离并以此停止位置为基准,再在同一方向给予一定移动指令值,使之移动一段距离,然后再往相反方向移动相同的距离,测量停止位置与基准位置之差。
在靠近行程的中点及两端的三个位置分别进行多次测定(一般为七次),求出各个位置上的平均值,以所得平均值中的最大值为反向偏差测量值。
金属加工微信内容不错,值得关注。
在测量时一定要先移动一段距离,否则不能得到正确的反向偏差值。
测量直线运动轴的反向偏差时,测量工具通常采有千分表或百分表,若条件允许,可使用双频激光干涉仪进行测量。
当采用千分表或百分表进行测量时,需要注意的是表座和表杆不要伸出过高过长,因为测量时由于悬臂较长,表座易受力移动,造成计数不准,补偿值也就不真实了。
若采用编程法实现测量,则能使测量过程变得更便捷更精确。
二、反向偏差的补偿数控机床,定位精度有不少>0.02mm,但没有补偿功能。
对这类机床,在某些场合下,可用编程法实现单向定位,清除反向间隙,在机械部分不变的情况下,只要低速单向定位到达插补起始点,然后再开始插补加工。
插补进给中遇反向时,给反向间隙值再正式插补,即可提高插补加工的精度,基本上可以保证零件的公差要求。
对于其他类别的数控机床,通常数控装置内存中设有若干个地址,专供存储各轴的反向间隙值。
当机床的某个轴被指令改变运动方向时,数控装置会自动读取该轴的反向间隙值,对坐标位移指令值进行补偿、修正,使机床准确地定位在指令位置上,消除或减小反向偏差对机床精度的不利影响。
一般数控系统只有单一的反向间隙补偿值可供使用,为了兼顾高、低速的运动精度,除了要在机械上做得更好以外,只能将在快速运动时测得的反向偏差值作为补偿值输入,因此难以做到平衡、兼顾快速定位精度和切削时的插补精度。
数控机床各数控轴重复定位精度和反向间隙一、重复定位精度1、定义重复定位精度是指机床滑板或大拖板在一定距离范围内(一般为200-300mm)往复运动7次千分表或激光干涉仪检测的精度。
取这7次的最大差值。
2、影响因素重复定位精度反映了伺服系统特性、进给系统的间隙与刚性以及摩擦特性等综合误差。
一般情况下,重复定位精度是呈正态分布的偶然性误差,它影响一批零件加工的一致性,是一个非常重要的精度指标。
它是影响机器能力指数CMK,工序能力指数CPK的重要因素。
3、相关标准GB/T18400.4-2010 与ISO标准相当。
300毫米长度上±0.0035JIS 日本标准DIN 德国标准二、重复定位精度和定位精度的区别。
定位精度指的是数控轴实际到达的位置和数控系统要求到达的位置误差。
比如要求一个轴走100 mm ,结果实际上它走了100.01 多出来的0.01 就是定位精度。
重复定位指的是同一个位置多次定位过去产生的误差。
比如要求一个轴走100 mm 结果第一次实际上他走了100.01 重复一次同样的动作他走了99.99 这之间的误差0.02 就是重复定位精度。
通常情况重复定位精度比定位精度要高的多。
单件生产(比如模具制造)要求机床具有较高的定位精度,大批量生产要求机床具有较高的重复定位精度三、重复定位精度的检测方法。
有两种,一种使用激光干涉仪,一种使用千分表。
介绍千分表检测重复定位精度。
1、选取数控轴经常使用的一段长度(200~300)毫米。
2、由作业指导员按下列要求编写一段小程序:1)设定坐标轴的起点2)坐标轴以工进速度(300米/分)往前走200或300毫米。
3)停住3秒。
(便于观察千分表)4)返回起点5)重复上述步骤共七次。
程序如下:(以X 轴为例)G91 X0G01 X300. F300G04 X3.G01 X0M993、作业指导员运行先单节运行小程序,确认程序无误。
4、保全工在停止的位置安装好千分表,并将千分表置零。
自动化数控机床的精度补偿在现代制造业中,自动化数控机床扮演着至关重要的角色。
它们以高效、精确的加工能力,为各种产品的生产提供了强大的支持。
然而,要确保数控机床始终保持高精度的加工性能,精度补偿是一项不可或缺的关键技术。
精度对于数控机床的重要性不言而喻。
在高精度的加工要求下,哪怕是微小的误差也可能导致产品质量不合格,造成资源浪费和成本增加。
而影响数控机床精度的因素众多,例如机床本身的制造误差、零部件的磨损、热变形、力变形以及控制系统的误差等。
为了应对这些影响精度的因素,精度补偿技术应运而生。
简单来说,精度补偿就是通过一系列的方法和手段,对机床在加工过程中产生的误差进行测量、分析,并采取相应的措施进行修正,从而提高机床的加工精度。
其中,误差测量是精度补偿的第一步。
常用的误差测量方法包括激光干涉测量、球杆仪测量、光栅测量等。
以激光干涉测量为例,它能够精确地测量机床坐标轴的定位误差、直线度误差等。
通过这些测量手段,可以获取机床在不同工作状态下的误差数据。
在获得误差数据后,接下来就是误差分析。
这需要对测量得到的数据进行深入研究,找出误差的规律和特点。
比如,是呈现出线性变化的趋势,还是存在周期性的波动?通过对误差规律的分析,可以为后续的补偿措施提供有力的依据。
针对不同类型的误差,采取的补偿措施也各不相同。
对于几何误差,常见的补偿方法有螺距误差补偿和反向间隙补偿。
螺距误差补偿是通过在机床控制系统中输入相应的补偿值,来修正由于丝杠螺距不均匀导致的误差。
反向间隙补偿则是针对丝杠与螺母之间的间隙进行补偿,以提高坐标轴的定位精度。
热变形误差是另一个需要重点关注的问题。
由于机床在运行过程中会产生热量,导致零部件发生热膨胀,从而影响加工精度。
为了补偿热变形误差,可以采用温度传感器实时监测机床关键部位的温度变化,并根据预先建立的热变形模型进行补偿。
力变形误差通常发生在机床加工过程中,由于切削力的作用,机床结构会发生微小的变形。
数控机床位置精度的检测与补偿现代数字精密加工技术已经成为当前主流加工技术,精度成为现代工业最重要的技术要求。
为此,在数控机床上对数控机床位置精度进行检测和补偿是提高数控机床的工作精度最直观有效的途径。
本文主要介绍当前数控机床上常用的几种误差测量方法与仪器的原理。
标签:数控机床激光干涉仪精度检测高精度是现代工业最主要的技术要求,随着数控机床在现代化工业技术中的应用越来越广泛,对数控机床在精度上的要求也越来越严格。
提高数控机床位置精度是提高数控机床加工精度的前提保障和最为直观有效的方法。
目前数控机床位置精度检验标准主要采用国际标准(IS0230-2)或(国家标准GBl0931-89)或国际上公认的VDI3441标准等。
同一台机床检测时如果采用了不同的标准,可能会得到不同的位置精度值,因此要注意根據需要选择相应标准的数控机床的精度指标,或者参考数控机床购买合同技术书上注明的验收标准。
下面具体探讨应用激光干涉仪对数控机床的几何精度以及各数控轴的反向偏差和定位精度的检测。
1 激光干涉仪检测数控机床精度的原理及方法激光干涉仪的工作原理是在氦氖激光器上添加一个约0.03特斯拉的轴向磁场。
根据塞曼分裂效应和频率牵引效应,激光器会产生出“1”和“2”两个不同频率的左旋和右旋圆偏振光。
其中一路在经过了偏振分光镜后又分成了仅含有f1的光束和仅含有f2的光束。
当可移动反射镜发生位移的时侯,含有f2的光束在经过可移动反射镜的反射后成为含有f2±Δf的光束(Δf是可动反射镜移动时因多普勒效应产生的附加频率,正负号表示移动方向)并与由固定反射镜反射回来的,仅含有f1的光束在经过偏振片2后会合成为测量光束f1-(f2±Δf)。
测量光束和参考光束f1-f2经过各自的光电转换组件、放大器组件、整形器组件后进入减法器相减后输出,成为仅含有±Δf的电脉冲信号。
经可逆计数器计数后,进行当量换算(乘1/2激光波长)后,即可得出可动反射镜的位移量。
FANUC 0i D数控机床直线轴的反向间隙的检测与补偿针对FANUC 0i D数控机床,介绍了使用步距规测量反向间隙的步骤和使用参数补偿反向间隙的方法。
希望通过文章的分析,能够对相关工作提供参考。
标签:FANUC 0i D;步距规;反向间隙补偿1 概述数控机床的主要精度指标要求包括几何精度,位置精度和加工精度。
其中位置精度主要包括定位精度和重复定位精度等,它的大小直接影响数控机床的加工精度。
而数控机床位置精度误差产生的主要原因是滚珠丝杠等机械结构存在反向间隙。
FANUC 0i-D数控系统可以通过参数补偿反向间隙,从而提高数控机床的定位精度和重复定位精度。
目前我国检测数控机床轴线反向间隙经常采用的标准有两个:国际标准ISO230-2:1997或国家标准GB17421.2-2000。
经常采用的测量仪器有激光干涉仪和步距规。
有些用户认为步距规太老旧了,激光干涉仪的精度更高,其实这是很大的误解。
举例来说,直到今天,世界上最高档的数控装备当属高档三坐标测量机,如南京齿轮厂在2011年购买的一台德国莱兹公司生产的规格为3m的三坐标测量机,德国人就是用规格1m的步距规分段进行现场检验和校准的。
[1]文章介绍利用步距规进行数控机床反向间隙测量的步骤和方法。
2 反向间隙的测量步骤采用步距规和激光干涉仪检测反向间隙的步骤基本一致,即在所检测的轴线行程中记录三个以上基准位置的读数,每个位置多次测量取平均数,并将各个位置处的平均数的最大值作为反向间隙测量值。
具体测量步骤如下:(1)清零1851,1852号参数后重启数控系统。
(2)数控机床回参考点。
(3)将步距规放置到工作台上找正。
以测量X轴反向间隙为例,找正的目的就是使步距规轴线与X轴轴线平行。
放置步距规之前要将步距规和工作台擦拭干净后再放置,另外杠杆百分表表杆不宜伸出过长。
(4)编制数控程序按照图1标准检验循环路径移动。
图1 是GB17421.2-2000给出的标注检验循环路径。