上下肢康复运动训练系统
- 格式:doc
- 大小:60.00 KB
- 文档页数:2
2019·7(下)《科技传播》142作者简介:张皓洋,南京外国语学校。
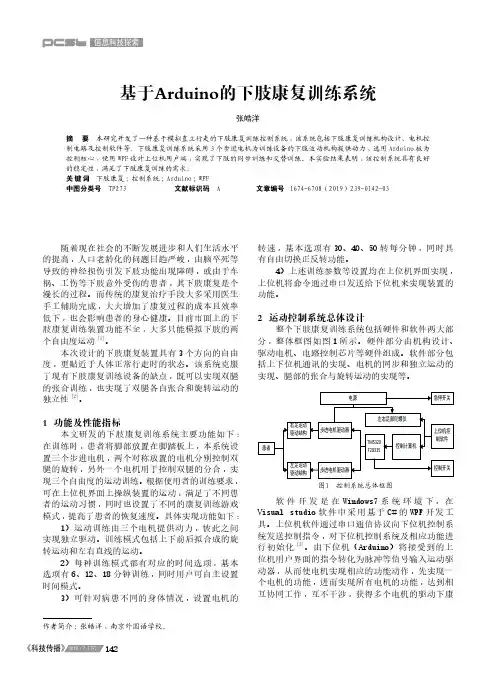
基于Arduino的下肢康复训练系统张皓洋摘 要 本研究开发了一种基于模拟直立行走的下肢康复训练控制系统,该系统包括下肢康复训练机构设计、电机控制电路及控制软件等。
下肢康复训练系统采用3个步进电机为训练设备的下肢运动机构提供动力,选用Arduino 板为控制核心,使用WPF 设计上位机用户端,实现了下肢的同步训练和交替训练。
本实验结果表明,该控制系统具有良好的稳定性,满足了下肢康复训练的需求。
关键词 下肢康复;控制系统;Arduino ;WPF中图分类号 TP273 文献标识码 A 文章编号 1674-6708(2019)239-0142-03随着现在社会的不断发展进步和人们生活水平的提高,人口老龄化的问题日趋严峻,由脑卒死等导致的神经损伤引发下肢功能出现障碍,或由于车祸、工伤等下肢意外受伤的患者,其下肢康复是个漫长的过程。
而传统的康复治疗手段大多采用医生手工辅助完成,大大增加了康复过程的成本且效率低下,也会影响患者的身心健康。
目前市面上的下肢康复训练装置功能不全,大多只能模拟下肢的两个自由度运动[1]。
本次设计的下肢康复装置具有3个方向的自由度,更贴近于人体正常行走时的状态。
该系统克服了现有下肢康复训练设备的缺点,既可以实现双腿的张合训练,也实现了双腿各自张合和旋转运动的独立性[2]。
1 功能及性能指标本文研发的下肢康复训练系统主要功能如下:在训练时,患者将脚部放置在脚踏板上,本系统设置三个步进电机,两个对称放置的电机分别控制双腿的旋转,另外一个电机用于控制双腿的分合,实现三个自由度的运动训练。
根据使用者的训练要求,可在上位机界面上操纵装置的运动,满足了不同患者的运动习惯,同时也设置了不同的康复训练游戏模式,提高了患者的恢复速度。
具体实现功能如下:1)运动训练由三个电机提供动力,彼此之间实现独立驱动。
训练模式包括上下前后拟合成的旋转运动和左右直线的运动。
骨科康复常用设备配置骨科康复涉及肌肉、骨骼、关节、肌腱、韧带和关节软骨等运动系统的损伤导致的肢体运动功能障碍。
这包括人工关节置换术、四肢创伤骨折术后、前交叉韧带重建术围手术期、肩袖损伤修复的围手术期康复,踝关节骨折、踝关节骨性关节炎、跟腱断裂、足外翻、扁平足,以及跟腱断裂缝合术后等。
康复过程中,肌力恢复是重要的一步。
为了帮助患者恢复肌力,可以使用平衡评定及训练系统、运动功能障碍评定训练仪、肌电诱发电位头盒、肢体智能康复工作站、四肢协调主被动训练系统、下肢肌力训练系统、上肢肌力训练系统、髋关节运动训练系统、上肢康复训练组合系统、肢体康复训练设备、上下肢交叉运动训练器、肢体康复器、腕关节旋转训练器、液压式踏步器、肌力训练弹力带、组合软垫、牵引网架、背部矫正运动器和系列沙袋等设备。
步态平衡功能障碍也是需要重点关注的问题。
为此,可以使用平衡评定及训练系统、下肢智能反馈训练系统、三维步态与运动分析系统、步态助行训练系统、减重步态训练系统和四肢协调主被动训练系统等设备。
对于骨折延迟愈合的问题,可以使用脉冲磁治疗仪、体外冲击波治疗仪、超声波治疗仪和立体动态干涉波治疗系统等设备。
在处理疼痛肢体肿胀时,可以使用自动脉冲冷敷系统、冷热治疗仪、电脑中频治疗仪、中频电疗仪、微波治疗机、熏蒸治疗机、中药熏蒸机、空气压力波治疗系统、脉冲磁治疗仪、电脑疼痛治疗仪和全自动智能蜡疗系统等设备。
关节活动范围受限也是需要注意的问题。
为了解决这个问题,可以使用多功能筋膜治疗床、多功能牵引床、四肢协调主被动训练系统、下肢肌力训练系统、上肢肌力训练系统、髋关节运动训练系统、上肢康复训练组合系统、肢体康复训练设备、肢体智能康复工作站、关节锻炼运动器(肩、肘)、踝关节锻炼运动器、手指(腕)关节锻炼运动器、膝(髋)关节锻炼运动器、肢体康复器、踝关节背屈活动训练器(液压式)、液压式踏步器、踏步训练器、组合软垫、牵引网架(网架和床)、多功能关节活动测量表、系列沙袋(绑式)和楔形垫(软)等设备。
2.性能指标2.1外观与结构2.1.1可触及的表面不应有毛刺、尖角、锐边和可能对使用者造成伤害或者损坏衣物的缺陷。
2.1.2焊接件表面均匀平整,不应有漏焊、虚焊、焊瘤、夹渣、裂缝、烧穿、飞溅物等缺陷。
2.1.3镀(涂)层表面应色泽均匀、光滑平整,不应有擦伤、烧痕、裂纹、针孔、麻点、斑点、毛刺、鼓包剥落等缺陷。
2.1.4产品在使用过程中,不应存在训练位与训练位之间或同一训练位之间的器械干涉,运动范围干涉、人体干涉等现象。
2.1.5在训练位正常训练状态下,使用者可触及的区域内不应存在被剪切、卷入、挤压或碰撞等现象。
2.1.6产品上所有重块移动范围不应出现无法控制的偏摆现象。
2.2训练模式具有上肢水平训练、上肢垂直交叉训练、上肢垂直平行训练和下肢训练 4 种训练功能,且 4 种训练功能均具备被动训练、主动训练和主被动训练 3 种训练模式。
2.3被动模式2.3.1软件功能设备提供转动方向的定时自动切换和手动切换措施,不提供改变最大输出扭矩的措施。
2.3.2转数范围上下肢转速 5~60rpm,步进可调,步距 1rpm,空载转速误差应不大于±30% 或±3rpm,二者取大值。
设备的转速监测值误差应不大于±10%或±2rpm,二者取大值。
2.3.3转速变化率在被动训练时,转速变化率小于0.5r/s2。
2.4主动模式2.4.1阻力范围上下肢阻力设定范围为 0~20 档位,分 20 档位设定,设备提供阻力档位的相对显示。
2.4.2转速监测值设备提供转速监测值显示,其误差应不大于±10%或±2rpm,二者取大值。
2.4.3产品提供限制最大转速的措施。
2.5操作控制1)设备可根据患者运动状态自动切换主动模式和被动模式,自动切换前提供至少 2s 的切换提示,不提供定时自动切换的功能;2)主动模式和被动模式的指示在整个训练过程中连续显示;3)训练开始时默认为被动模式;4)训练启动前设定转速时,操作者必须做出附加的确认动作,才能将转速设定至 30r/min 或以上;5)上肢训练转速预置值应不大于 10r/min,下肢训练转速预置值应不大于15r/min;6)产品界面提供转动方向、转速、阻力、训练时间、肌力对称性信息,以图示方式显示;7)患者扶手和/或训练手柄的握持部分不提供带有可改变训练模式和运行参数(如转动方向、转速、阻力、痉挛等级、训练时间、换向时间﹑输出扭矩等)的控制装置;8)运行参数的设置值不提供仅通过一个动作就从最小变为最大;9)设备提供手动急停保护装置;10)设备不提供自动控制转速的被动模式;11)设备不提供有线连接的手持式控制器。
1性能指标1.1外观下肢运动康复训练设备外壳表面应光滑,所有表面不得有细孔、裂纹和毛刺,易清洁和消毒。
1.2工作时间下肢运动康复训练设备充满电后工作时间应>120分钟。
1.3开机指示下肢运动康复训练设备应具有开机指示,开机时电源开关应发出蓝光。
1.4工作模式下肢运动康复训练设备应具有以下模式:1.4.1普通模式。
下肢运动康复训练设备选择普通模式后,开关上的LED不亮灯;双腿对应触发模式,即为那支腿动作则触发产品对应的腿臂给出作用力。
1.4.2左触发模式。
下肢运动康复训练设备选择左触发模式后,开关上的LED亮绿灯;当触发左腿时,右腿应产生向上抬腿的力。
1.4.3右触发模式。
下肢运动康复训练设备选择右触发模式后,开关上的LED亮蓝灯;当触发右腿时,左腿应产生向上抬腿的力。
1.5力量选择1.6最大运行角度保护下肢运动康复训练设备最大运行角度≤90度。
1.7触发角度下肢运动康复训练设备触发角度的相对角度 10±5度。
1.8低电量提示下肢运动康复训练设备应具有低电量提示功能。
1.9APP功能1.9.1下肢运动康复训练设备应能通过蓝牙连接安卓系统APP终端。
1.9.2工作模式切换。
点击“切换”按键,APP应能切换工作模式。
1.9.3力量选择。
点击“力量档位”按键,APP应能切换力量选择档位。
1.9.4网络安全要求1.9.4.1数据接口APP软件通过蓝牙与主机进行双向数据传输和实时远程控制,传输协议为蓝牙4.0。
1.9.4.2用户访问控制控制型软件需登录密码作为用户身份鉴别。
软件具有用户访问控制机制,包括用户身份鉴别方法(用户名、口令)、用户权限(可对属于该用户的使用者进行注册登记,添加或删除使用者信息、保存删除使用者设置的权限)。
1.10环境试验按GB/T 14710-2009中气候环境试验II组,机械环境试验II组的要求。
运输试验、电源电压适应能力试验应分别符合GB/T 14710-2009中第4章、第5章的要求。
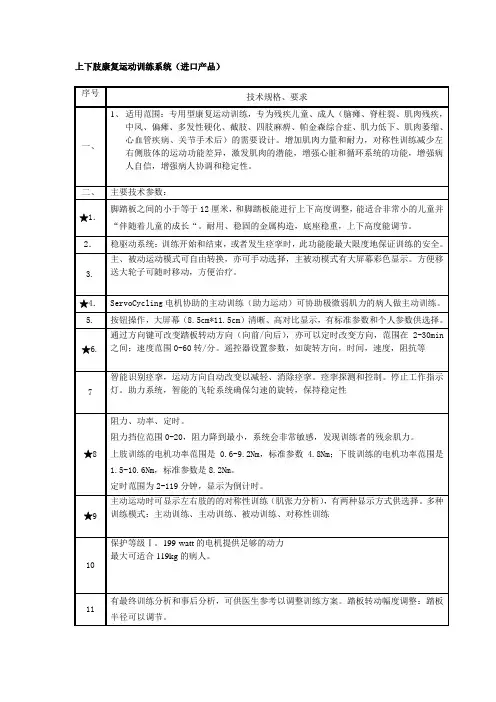
上、下肢康复训练评估系统招标技术参数及要求数量:一套(含上下肢);预算:90万元一.上肢智能训练评估系统技术要求:*1.通过力反馈技术进行上肢运动功能训练。
包括等速训练,助力训练,主动训练,抗阻训练等。
*2.标配上肢康复分析功能。
包含上肢肌力、关节活动范围分析等多种分析功能。
*3.力反馈传感器精度≤0.1公斤, 范围0-10公斤,反馈数值可以实时显示,助力大小和阻力大小均可电脑调节。
4.双电机独立驱动,运动速度0-35cm/s,控制精度≤1mm,连续可调。
5.运动范围570mm*400mm(参考数值),连续可调。
6.设备高度电动连续可调,高度调节范围为670mm到1070mm(参考数值),连续可调。
7.标配移动式台车,一体式操作显示终端,实时显示三维场景。
8.标配示教模式,可以自由带动机械臂进行轨迹记录和回放训练9.控制方式:结合全伺服电机控制和电脑控制,训练时间、运动范围,运动速度均可电脑调节。
10.安全检测:提供痉挛灵敏度检测,发生痉挛能停止运动。
11.标配虚拟现实功能:包含不同场景,用户身临其境。
12.标配数据库管理,提供查询,新增,删除,修改等功能13.标配报告功能,能够一键自动生成训练报告,能够比较查看不同时间的情况记录功能:记录每一次训练的表现14.软件预留多种接口,例如EMG信号,EEG信号接口,扩展设备功能15.联网状况下,可以实现网络数据库发布,方便多中心合作*16.质保要求:整机质保两年。
二.下肢智能反馈训练系统技术要求技术参数及特点:1.操作平台:标配搭载windows xp系统的便携式双核笔记本电脑。
2.床体:采用抗菌耐磨高弹力皮革,具备高阻燃性、抗菌、耐温、防划、床体弹力好、舒适等功能;3.床体控制装置:3个原装进口直线电机(提供证明材料);床体升降高度范围:52~86 cm;床体站立角度范围:0~80 °;床体后仰角度范围:0~10°;4.配备减重吊带,使训练保持在减重状态下进行;*5.步行训练方式:仿真人体步行曲线函数,包含初速度、加速度、减速度过程;6.训练驱动装置:2个原装进口伺服马达;踏步角度范围:0~25 °;踏步速度范围:1~80 Step/Min;7.训练模式:主、被动训练模式*8.多功能脚踏板:根据身高调节适应病人内、外翻足型,调整踝关节角度,矫正患者步态。
基于虚拟现实的下肢主动康复训练系统LI Wenxiao;GUO Bingjing;HAN Jianhan;LI Xiangpan;MAO Yongfei【摘要】针对传统下肢康复训练中病人参与度低、主动运动意图逐渐丧失的问题,设计一种基于虚拟现实的下肢主动康复训练系统.该系统采用惯性检测单元(IMU)获取并解算下肢关节活动度,作为虚拟场景中的运动控制信号,并建立无线蓝牙通信机制,把患者下肢运动与运动功能康复训练游戏结合在一起.基于鞋内置多点足底力传感器(FSR)获取患肢足底力参数,识别步态相周期,作为康复评估的数据基础.实验验证了康复数据获取的准确性、交互通信的实时性与康复场景运行的流畅性.【期刊名称】《现代电子技术》【年(卷),期】2019(042)004【总页数】5页(P61-64,70)【关键词】虚拟现实;主动康复;下肢康复训练;传感系统;活动度;足底力【作者】LI Wenxiao;GUO Bingjing;HAN Jianhan;LI Xiangpan;MAO Yongfei 【作者单位】;;;;【正文语种】中文【中图分类】TN915.5-34;TP274随着社会老龄化的加剧,由脑卒中等导致的神经损伤引起的下肢功能障碍者逐年增加[1],严重影响患者的生活质量,给社会和家庭带来了沉重的负担。
传统的康复治疗多采用医师手工辅助完成,效率低、康复过程枯燥,已不能满足患者的需求[2]。
根据大脑神经可塑性理论、镜像神经元理论和运动康复理论,丰富的训练环境可以促进康复的进程[3],也可以有效地提高患者的训练兴趣和积极性,从而提高康复效率。
如德国柏林弗朗霍费尔研究所研制Haptic Walker机器人系统和加拿大蒙特利尔McGill大学研究的多自由度反馈的下肢训练器;当前的下肢康复训练设备多为在医疗机构中使用,价格昂贵[4],同时也需要医护人员的协助,缺乏可供患者使用的家庭便携式智能康复训练设备,不利于患者的自主训练。
2.性能指标2.1性能2.1.1机械部件调节2.1.1.1床体升降范围应在 45cm~86cm 范围内。
2.1.1.2床体直立角度调节范围应在0°~80°内。
2.1.1.3床面腰部后仰角调节范围应在0°~10°范围内。
2.1.1.4腿长调节范围应在 0cm~25cm 范围内。
2.1.2治疗参数2.1.2.1踏步速度a)速度应为 1 步/min~80 步/min,连续可调,步进应为 1 步/min;b)误差应为 1 步/min 或标称值的±5%,取二者中大值。
2.1.2.2踏步角度应在0°~25°范围内。
2.1.2.3治疗时间a)应在 1min~90min 内,连续可调,步进应为 1min;b)默认时间应为 30min;c)误差应为 30s 或标称值的±5%,取二者大值。
2.1.2.4压力范围(A1S 适用)a)A1S 型应能分别测量左/右踏板受到的压力大小;b)测量范围应在 0~60kg 内;c)显示值误差应为 5kg 或±10%,取二者大值。
2.1.3操作功能a)A1 型应具有跟踪模式并描绘跟踪曲线,以实时跟踪显示患者腿部受到电机的力矩的大小;A1S 型应可分别实时跟踪显示患者腿部受到电机的力矩的大小及脚底压力的大小。
b)应具有评估模式并描绘评估曲线,以实现左/右腿训练过程中的僵硬度评估值;c)应具有操作界面模式,能对训练参数进行设置和调整。
d)应具有音乐播送功能。
e)A1S型应具有游戏训练功能。
f)A1S 型应具有记录患者治疗信息的功能。
2.1.4承载能力2.1.4.1设备应能承载 135kg 分布的质量,其形变的量不应大于 5mm。
2.1.4.2设备在承载 135kg 分布的质量的情况下:a)作上、下运动、角度调节呈中间任一位置时,自行下降量不得超过 10mm/h,角度变化量不得超过2°/h;b)设备应能从最低位置起上升。
翔宇智能下肢反馈康复训练系统操作规程智能下肢反馈康复训练系统是一款主要用来对下肢功能障碍患者进行模拟步行训练的仪器,具有主被动两种训练模式,被动训练用于早中期的训练或肌力分级在2级以下的患者,当患者的肌力提高到2级以上的时候,可以进行主动训练,主要目的是刺激患者下肢的神经肌肉,促进其功能的恢复,帮助其建立正常的步态模式,最终实现患者下地进行行走。
该仪器同时具有跟踪评估模式、痉挛检测模式等,功能齐全,使用过程中安全性高。
产品原理
1)刺激下肢神经肌肉,增强下肢肌肉力量,防止肌肉的萎缩;
2)改善下肢血液循环,加强血供,改善下肢的营养供给。
产品特点
本产品由微电脑自动控制;被动训练;
起立踏步训练系统为直立床与下肢关节康复训练的完善结合,对膝关节、踝关节做被动训练。
适用于长期卧床不起的病人。
采用进口优质控制器和驱动器,仪器平稳无噪音。
可移动式床体,操作台数码显示轻触薄膜开关控制,操作方便,使用寿命更长。
起立角度可点动控制操作,简便、方便患者转移。
踏步时间和踏步速度由微电脑控制。
配备紧急停止开关,设备安全可靠。
脚踏板电动伸缩装置,可根据患者身高,做灵活调节,并可对患
者下肢施加压力。
预防骨质疏松。
脚踏板上下自由活动,适用于踝关节恢复训练。
豪华脚轮,移动灵活,锁定牢固。
有减重功能,不可电动调节。
下肢智能反馈训练系统性能指标下肢智能反馈训练系统是一种用于康复治疗和改善下肢功能的先进技术。
它结合了传感器技术、智能算法和虚拟现实技术,为患有下肢运动障碍的个体提供个性化的康复训练,以恢复其运动能力和改善生活质量。
该系统使用智能反馈技术,能够实时监测患者的运动状态,并根据患者的情况进行相应的调整和反馈,以提高训练效果。
下肢智能反馈训练系统的性能指标可以从以下几个方面进行评估。
1.精确度和可靠性:下肢智能反馈训练系统应具备准确和可靠的运动监测功能。
传感器应能够实时、精确地检测患者的运动状态,并将数据传递给智能算法进行分析和反馈。
系统应能够区分不同的运动模式,并准确地指导患者进行正确的运动。
2.实时性:下肢智能反馈训练系统应具备实时的运动监测和反馈功能。
系统应能够在患者进行运动时,实时地对其进行监测和反馈,以提供准确、及时的指导。
3.个性化:下肢智能反馈训练系统应具备个性化的训练功能。
系统应能够根据患者的个体差异和康复需求,进行个性化的调整和设置,以满足不同患者的训练需求。
4.舒适性:下肢智能反馈训练系统应为患者提供良好的舒适感。
系统应具备合适的硬件设计,以提供舒适的穿戴体验。
同时,系统的训练过程应以患者的舒适为先,避免过度疲劳或不适。
5.可操作性:下肢智能反馈训练系统应具备便捷的操作性。
系统的用户界面应简单易懂,患者和康复医护人员能够方便地操作系统,并进行必要的调整和设置。
6.效果评估:下肢智能反馈训练系统应具备评估训练效果的功能。
系统应能够记录患者的训练数据,并根据数据进行训练效果的评估。
评估结果可以帮助康复医护人员了解患者的康复进展,并进行必要的调整。
下肢智能反馈训练系统的性能指标直接关系到系统的康复效果和临床应用。
一个好的下肢智能反馈训练系统应具备高精确度和可靠性,能够提供实时和个性化的训练,同时保证患者的舒适感和操作便捷性。
在实际临床应用中,系统的性能指标需要得到充分的评估和验证,以确保其可靠性和有效性。