合肥工业大学力学班有限元试题08A答案
- 格式:doc
- 大小:321.50 KB
- 文档页数:7
有限单元法考试题及答案一、单项选择题(每题2分,共10分)1. 有限元法中,单元刚度矩阵的计算是基于()。
A. 位移法B. 势能原理C. 能量守恒定律D. 牛顿第二定律答案:B2. 在有限元分析中,以下哪项不是网格划分时需要考虑的因素?()A. 网格数量B. 网格形状C. 材料属性D. 边界条件答案:C3. 有限元分析中,以下哪项不是结构分析的基本步骤?()A. 离散化B. 求解C. 后处理D. 优化设计答案:D4. 在有限元分析中,以下哪种类型的单元不适用于平面应力问题?()A. 三角形单元B. 四边形单元C. 六面体单元D. 楔形单元答案:C5. 有限元分析中,以下哪种边界条件不属于几何边界条件?()A. 固定支座B. 压力C. 温度D. 位移答案:C二、多项选择题(每题3分,共15分)6. 有限元法中,以下哪些因素会影响单元的精度?()A. 单元形状B. 单元数量C. 材料属性D. 网格划分答案:ABD7. 在有限元分析中,以下哪些是常见的数值积分方法?()A. 一阶积分B. 二阶积分C. 高斯积分D. 牛顿-莱布尼茨积分答案:ABC8. 有限元分析中,以下哪些是常见的单元类型?()A. 线性单元B. 二次单元C. 三次单元D. 非线性单元答案:ABCD9. 在有限元分析中,以下哪些是常见的后处理技术?()A. 应力云图B. 位移云图C. 模态分析D. 热分析答案:ABC10. 有限元分析中,以下哪些是常见的非线性问题?()A. 几何非线性B. 材料非线性C. 接触非线性D. 热应力问题答案:ABCD三、填空题(每题2分,共20分)11. 有限元法中,单元刚度矩阵的计算通常基于___________原理。
答案:势能12. 在有限元分析中,网格划分的目的是将连续的___________离散化为有限数量的单元。
答案:域13. 有限元分析中,___________是将实际问题转化为数学问题的关键步骤。
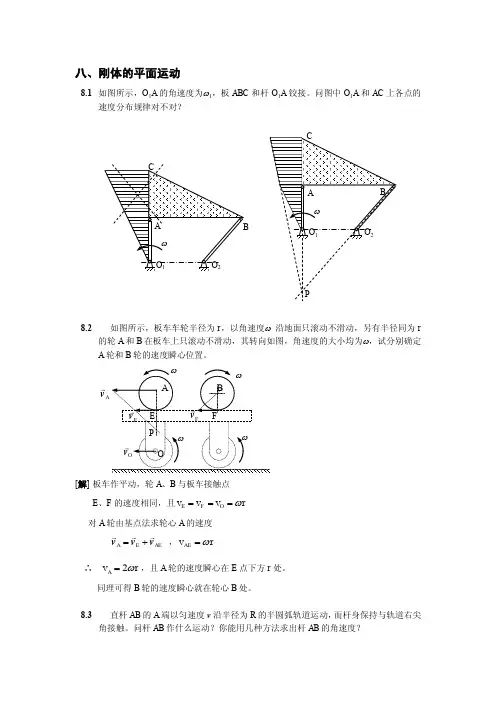
八、刚体的平面运动8.1 如图所示,O 1A 的角速度为ω1,板ABC 和杆O 1A 铰接。
问图中O 1A 和AC 上各点的速度分布规律对不对?8.2如图所示,板车车轮半径为r ,以角速度ω 沿地面只滚动不滑动,另有半径同为r 的轮A 和B 在板车上只滚动不滑动,其转向如图,角速度的大小均为ω,试分别确定A 轮和B 轮的速度瞬心位置。
[解] 板车作平动,轮A 、B 与板车接触点 E 、F 的速度相同,且r v v v O F E ω=== 对A 轮由基点法求轮心A 的速度 A E AE =+v v v ,r v AE ω=∴ r v A ω2=,且A 轮的速度瞬心在E 点下方r 处。
同理可得B 轮的速度瞬心就在轮心B 处。
8.3直杆AB 的A 端以匀速度v 沿半径为R 的半圆弧轨道运动,而杆身保持与轨道右尖角接触。
问杆AB 作什么运动?你能用几种方法求出杆AB 的角速度?E FPOE v Av Fv Ov[解] AB 杆作平面运动。
(一) 瞬心法AB 杆作平面运动,速度瞬心为P 。
Rv AP v AAB2==ω (二)基点法D A DA =+v v v ,DA v v AB A DA ωθ==sin又 DA =2R cos(90o -θ)=2R sin θ ∴ Rv AB 2=ω(三)自然法: d d AB tϕω=,而R S ϕ2= ∴d d 2d d S R v t t ϕ==, d d 2vt R ϕ= ∴ Rv AB 2=ω 8.4如图所示四连杆机构OABO 1中,OA=O 1B=AB/2,曲柄OA 的角速度ω=3rad/s 。
当OA 转到与OO 1垂直时,O 1B 正好在OO 1的延长线上,求该瞬时AB 杆的角速度ωAB 和曲柄O 1B 的角速度ω1。
[解]取AB 为研究对象,AB 作平面运动。
以A 为基点,画B 点速度合成图 由B A BA =+v v v(rad/s)32230sin o==∴⋅=⋅==ωωωωAB OAAB OA v v AB AB ABABBBvvvDAv Dv Dv111cos3022(rad/s)B BAv v OA O Bωωω=︒=⋅=∴=8.5图示曲柄摇机构中,曲柄OA以角速度oω绕O轴转动,带动连杆AC在摇块B内滑动,摇块及与其固结的BD杆绕B铰转动,杆BD长l;求在图示位置时摇块的角速度及D点的速度。
有限元试题及答案一、选择题1. 有限元方法是一种用于求解工程和物理问题的数值技术,其核心思想是将连续域划分为有限数量的离散子域。
以下哪项不是有限元方法的特点?A. 网格划分B. 边界条件处理C. 局部近似D. 整体求解答案:D2. 在有限元分析中,以下哪项不是网格划分的常见类型?A. 三角形网格B. 四边形网格C. 六边形网格D. 圆形网格答案:D3. 对于线性弹性问题,以下哪种元素类型不适用于有限元分析?A. 线性三角形元素B. 二次三角形元素C. 线性四边形元素D. 三次四边形元素答案:D二、填空题1. 在有限元分析中,单元刚度矩阵的计算通常涉及到单元的_________。
答案:形状函数2. 有限元方法中,边界条件可以分为_________和_________。
答案:Dirichlet边界条件;Neumann边界条件3. 有限元软件通常采用_________方法来求解大型稀疏方程组。
答案:迭代三、简答题1. 简述有限元方法的基本步骤。
答案:有限元方法的基本步骤包括:- 定义问题的几何域和边界条件。
- 将几何域划分为有限数量的小单元。
- 为每个单元定义形状函数。
- 计算单元刚度矩阵和载荷向量。
- 组装全局刚度矩阵和载荷向量。
- 施加边界条件。
- 求解线性方程组,得到节点位移。
- 计算单元应力和应变。
2. 为什么在有限元分析中需要进行网格划分?答案:网格划分是有限元分析中的一个重要步骤,因为它允许将连续的几何域离散化,使得问题可以被数值方法求解。
通过网格划分,可以: - 简化复杂几何形状的分析。
- 适应不同的材料属性和边界条件。
- 提供足够的细节以捕捉应力和位移的局部变化。
- 减少计算复杂度,提高求解效率。
四、计算题1. 假设有一个平面应力问题,已知材料的弹性模量E=210GPa,泊松比ν=0.3。
请计算一个边长为10mm的正方形单元在单轴拉伸下的单元刚度矩阵。
答案:单元刚度矩阵\[ K \]可以通过以下公式计算:\[K = \frac{E}{(1-\nu^2)} \int_{\Omega} \left[ B^T B \right] d\Omega\]其中,\( B \)是应变-位移矩阵,\( \Omega \)是单元的面积。
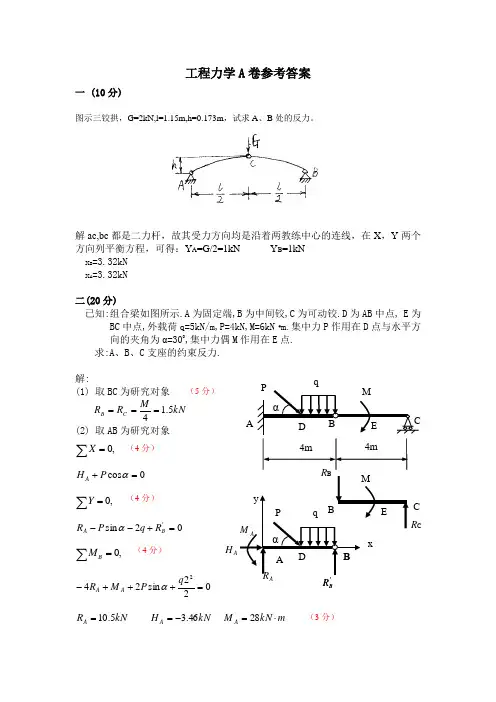
工程力学A 卷参考答案一 (10分)图示三铰拱,G=2kN,l=1.15m,h=0.173m ,试求A 、B 处的反力。
解ac,bc 都是二力杆,故其受力方向均是沿着两教练中心的连线,在X ,Y 两个方向列平衡方程,可得:Y A =G/2=1kN Y B =1kN x B =3.32kN x A =3.32kN二(20分)已知:组合梁如图所示.A 为固定端,B 为中间铰,C 为可动铰.D 为AB 中点, E 为BC 中点,外载荷q=5kN/m,P=4kN,M=6kN ·m.集中力P 作用在D 点与水平方向的夹角为α=300,集中力偶M 作用在E 点. 求:A 、B 、C 支座的约束反力. 解: (1) 取BC 为研究对象 kN M R R C B 5.14=== (2) 取AB 为研究对象∑=,0X 0cos =+αP H A∑=,0Y 02sin '=+--B A R q P R α∑=,0B M 022sin 242=+++-q P M R A A αkN R A 5.10= kN H A 46.3-= m kN M A ⋅=28A qR 'BA A H C R C(4分)(5分) (4分)(4分)(3分)三(10分)如图所示钢制拉杆承受载荷F=32kN,若材料的许用应力=120MPa,杆件横截面积为圆形,求横截面的最小半径。
解:由截面法可知,轴力F N=F=32kN拉杆的横截面面积A≥[]δMaxF=63101201032⨯⨯=266.7mm2即πr2≥266.7 mm2,故r ≥9.2mm横截面的最小半径为9.2mm四(10分)如图所示,等直杆AD,左端固定,F1=100KN,F2=80KN,F3=60KN,求各段杆的轴力,做出轴力图。
解:(1)求支座反力。
∑==niFi10即F N+F1-F2+F3=0 得F N= -F1+F2-F3=-100+80-60=-80kN结果为负号,说明支座反力水平向左。
有限元课后习题答案1.1有限元法的基本思想和基本步骤是什么首先,将表示结构的连续离散为若干个子域,单元之间通过其边界上的节点连接成组合体。
其次,用每个单元内所假设的近似函数分片地表示求解域内待求的未知厂变量。
步骤:结构的离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移。
1.2有限元法有哪些优点和缺点优点:有限元法可以模拟各种几何形状复杂的结构,得出其近似解;通过计算机程序,可以广泛地应用于各种场合;可以从其他CAD软件中导入建好的模型;数学处理比较方便,对复杂形状的结构也能适用;有限元法和优化设计方法相结合,以便发挥各自的优点。
缺点:有限元计算,尤其是复杂问题的分析计算,所耗费的计算时间、内存和磁盘空间等计算资源是相当惊人的。
对无限求解域问题没有较好的处理办法。
1.3有限元法在机械工程中有哪些具体的应用静力学分析模态分析动力学分析热应力分析其他分析2.1杆件结构划分单元的原则是什么?1)杆件的交点一定要取为节点2)阶梯形杆截面变化处一定要取为节点3)支撑点和自由端要取为节点4)集中载荷作用处要取为节点5)欲求位移的点要取为节点6)单元长度不要相差太多2.2简述单元刚度矩阵的性质。
单元刚度矩阵是描述单元节点力与节点位移之间关系的矩阵。
2.3有限元法基本方程中每一项的意义是什么?{Q}---整个结构的节点载荷列阵(包括外载荷、约束力);{}---整个结构的节点位移列阵;[K]---结构的整体刚度矩阵,又称总刚度矩阵。
2.4简述整体刚度矩阵的性质和特点。
对称性奇异性稀疏性主对角上的元素恒为正2.5位移边界条件和载荷边界条件的意义是什么由于刚度矩阵的线性相关性不能得到解,从而引入边界条件。
2.6写出平面刚架问题中单元刚度矩阵的坐标变换式2.7推导平面刚架局部坐标系下的单元刚度矩阵。
2.8简述整体坐标的概念。
单元刚度矩阵的坐标变换式把平面刚架的所有单元在局部坐标系X’O’Y’下的单元刚度矩阵变换到一个统一的坐标系xOy下,这个统一的坐标系xOy称为整体坐标系。
习题2.1 解释如下的概念:应力、应变,几何方程、物理方程、虚位移原理. 解 错误!应力是某截面上的应力在该处的集度。
○,2 应变是指单元体在某一个方向上有一个ΔU 的伸长量,其相对变化量就是应变.X U Xx ∆∆=ε表示在x 轴的方向上的正应变,其包括正应变和剪应变.○3几何方程是表示弹性体内节点的应变分量与位移分量之间的关系,其完整表示如下:Txz yz xy z y x x w z u zv y w y u x v z w y vx u x w z u z v y w y u x v z w y v x u ⎥⎦⎤⎢⎣⎡∂∂+∂∂∂∂+∂∂∂∂+∂∂∂∂∂∂∂∂=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∂∂+∂∂∂∂+∂∂∂∂+∂∂∂∂∂∂∂∂=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=γγγεεεε错误!物理方程:表示应力和应变关系的方程某一点应力分量与应变分量之间的关系如下:⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=666564636261565554535251464545434241363534333231262524232221161514131211αααααααααααααααααααααααααααααααααααατττσσσσxz yz xy z y x ⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡xz yz xy zz yy xx γγγεεε错误!虚位移原理:在弹性有一虚位移情况下,由于作用在每个质点上的力系,在相应的虚位移上虚功总和为零,即为:若弹性体在已知的面力和体力的作用下处于平衡状态,那么使弹性体产生虚位移,所有作用在弹性体上的体力在虚位移上所做的工就等于弹性体所具有的虚位能. 2.2说明弹性体力学中的几个基本假设。
错误! 连续性假设:就是假定整个物体的体积都被组成该物体的介质所填满,不存在任何间隙. 错误! 完全弹性假设:就是假定物体服从虎克定律。
合肥工业大学工程硕士专业《工程中的有限元》2009年试卷答案2009年1月18日晚考试答案 学号: 专业:适用专业:工程硕士-土木与建筑、水利工程2008级,出题人:牛忠荣1.(10分)线弹性力学静力问题有限元法计算列式的推导是如何采用弹性力学问题基本方程? 答:(1) 假设单元的位移场模式 e N δf =, (2) 代入到几何方程,得 e B δε=, (3) 代入到物理方程,得 e DB δζ=,(4) 代入到虚功方程或最小势能原理,得到单元刚度刚度方程 e e K δF =, (5) 叠加到总刚阵,得到结构的平衡方程 K δF =,(6) 引入已知位移边界条件后,K 非奇异,解上式得结点位移。
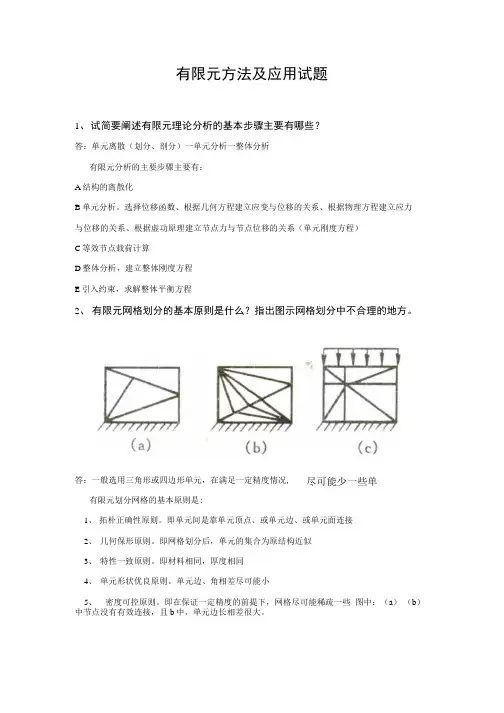
2.(12分)图示弹性力学平面问题,采用三角形常应变元,网格划分如图,试求:(1) 对图中网格进行结点编号,并使其系统总刚度矩阵的带宽最小; (2) 计算在你的结点编号下的系统刚度矩阵的半带宽; (3) 根据图中结构的边界约束状态,指出那些结点自由度的位移已知并且为何值。
解: 10)1(2,4=+==d M d B041==u u 041==v v题2 图p103.(10分)弹性力学有限元中,平面等参数单元中的“等参数”概念是何意思? 该单元在跨相邻单元时,位移场连续吗? 应力场连续吗?答:在单元中,位移描述的形函数和单元形状描述的形函数是相同的,参数个数相等,称为等参数元。
相邻等参元之间,位移是连续的,应力场不连续。
4.(13分)回答下列问题:(1) 弹性力学平面问题4节点四边形等参元,其单元自由度是多少?单元刚阵元素是多少?(2) 弹性力学空间轴对称问题三角形3节点单元,其单元自由度是多少?单元刚阵元素是多少?(3) 弹性力学空间问题4节点等参元,其单元自由度是多少?单元刚阵元素是多少?(4) 平面刚架结构梁单元(考虑轴向和横向变形)的自由度是多少?单元刚阵元素是多少?答:平面问题4节点等参元,其单元自由度是8个; 单元刚阵元素有64个; 轴对称问题三角形3节点单元,单元自由度是6个;单元刚阵元素有36个; 空间问题4节点等参元,其单元自由度是12个;单元刚阵元素有144个; 平面梁单元(考虑轴向和横向变形)的自由度是6个;单元刚阵元素有36个。
有限元法基础试题有限元法基础试题(a)一、填空题(5×2分)1.1单元刚度矩阵k?e??btdbd?中,矩阵b为__________,矩阵d为___________。
1.2边界条件通常存有两类。
通常出现在边线全然紧固无法旋转的情况为_______边界,具体内容选定非常有限的非零值加速度的情况,例如提振的下陷,称作_______边界。
1.3内部微元体上外力总机械功:+?的表达??d?wex,x??xy,y?fbx??u???xy,x??y,y?fby??v?dxdy??x?u,x??y?v,y??xy??u,y?? u,x??dxdy式中,第一项为____________________的虚功,第二项为____________________的虚功。
1.4弹簧单元的位移函数n1+n2=_________。
1.5kij数学表达式:令dj=_____,dk=_____,k?j,则内力fi?kij。
二、判断题(5×2分)2.1加速度函数的假设合理是否将直接影响至有限元分析的计算精度、效率和可靠性。
()2.2变形体虚功原理适用于于一切结构(一维杆系、二维板、三位块体)、适用于于任何力学犯罪行为的材料(线性和非线性),就是变形体力学的广泛原理。
()2.3变形体虚功原理建议力系均衡,建议虚位移协同,就是在“均衡、协同”前提下功的并集关系。
()2.4常快速反应三角单元中变形矩阵就是x或y的函数。
()2.5等距单元中变形矩阵就是x或y的函数。
()三、简答题(26分后)3.1列举有限元法的优点。
(8分)3.2写下非常有限单元法的分析过程。
(8分后)3.3列出3种普通的有限元单元类型。
(6分)3.4详细阐释变形体虚位移原理。
(4分后)四、计算题(54分)4.1对于右图右图的弹簧女团,单元①的弹簧常数为10000n/m,单元②的弹簧常数为20000n/m,单元③的弹簧常数为10000n/m,确认各节点加速度、反力以及单元②的单元力。
致奋战在有限元考试一线的兄弟姐妹们期末考试接近尾声了,估计咱都是剩下两门左右没考。
这两天我看了一下有限元,许多问题有些棘手。
相信大家的感觉跟我差不多。
现在是元旦假期,知道大家许多都“拖家带口”的,不容易,呵呵……小生相对来说清闲一点,就趁着这几天整理了一下有限元教材课后题的答案。
在这里,我不得不说:答案不好找。
所以找的不是太全。
而且肯定有许多疏漏之处,仅供大家参考。
希望能对大家有所帮助。
以下是我整理的答案:(温馨提示:在word2000中编辑的公式无法粘到日志当中,有关公式请大家参考教材。
)习题有限元法的基本思想:有限元法把连续体离散成有限个单元,每个单元的场函数是只包含有限个待定节点参量的简单场函数,这些单元场函数的集合就能近似代表整个连续体的场函数。
根据能量方程或加权残量方程可建立有限个待定参量的代数方程组,求解此离散方程组就得到有限元法的数值解。
1.1 有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度的问题?位移有限元法的标准化程式是怎样的?①离散:将连续区域分散成有限多个子区域;②给每个单元选择合适的位移函数来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。
因为节点位移个数是有限的,故无限自由度问题就转变成了有限自由度的问题;③有限元法的标准化程式:结构或区域离散、单元分析、整体分析、数值求解。
1.2 什么叫做节点力和节点荷载?两者有什么不同?为什么应该保留节点力的概念?①节点力:节点对单元的作用力。
节点荷载:包括集中力和将体力、面力按静力等效原则移植到节点形成的等效荷载,原荷载和移植后的荷载在虚位移上的虚功相等;②相对于整体结构来说,节点力是内力,节点荷载是外力。
(注:我不太确定)③节点力的概念在建立单元刚度方程的时候需要用到。
1.3 单元刚度矩阵和整体刚度矩阵各有哪些性质?单元刚度系数和整体刚度系数的物理意义是什么?①单刚:对称性,奇异性。
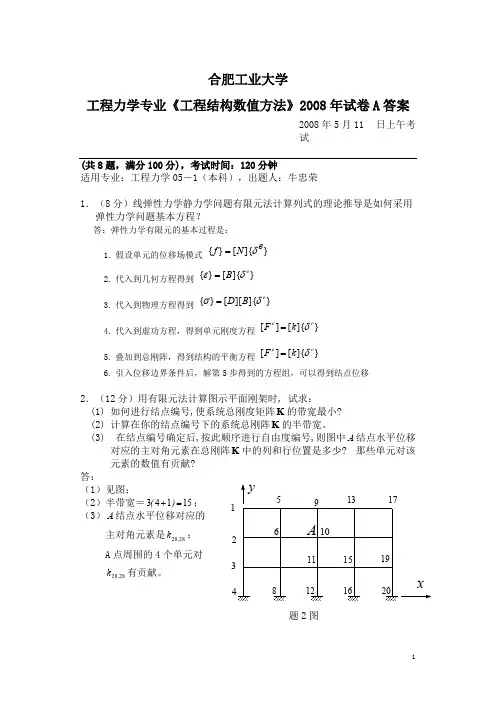
合肥工业大学工程力学专业《工程结构数值方法》2008年试卷A 答案2008年5月11 日上午考试(共8题,满分100分),考试时间:120分钟适用专业:工程力学05-1(本科),出题人:牛忠荣1.(8分)线弹性力学静力学问题有限元法计算列式的理论推导是如何采用弹性力学问题基本方程?答:弹性力学有限元的基本过程是:1.假设单元的位移场模式}]{[}{e N f δ=2.代入到几何方程得到}]{[}{eB δε=3.代入到物理方程得到}]{][[}{e B D δσ=4.代入到虚功方程,得到单元刚度方程}]{[][ee k F δ=5.叠加到总刚阵,得到结构的平衡方程}]{[][e e k F δ=6.引入位移边界条件后,解第5步得到的方程组,可以得到结点位移2.(12分)用有限元法计算图示平面刚架时, 试求:(1) 如何进行结点编号,使系统总刚度矩阵的带宽最小? K (2) 计算在你的结点编号下的系统总刚阵的半带宽。
K (3) 在结点编号确定后,按此顺序进行自由度编号,则图中结点水平位移A 对应的主对角元素在总刚阵中的列和行位置是多少? 那些单元对该K 元素的数值有贡献?答:(1)见图;(2)半带宽=;15143=+)((3)结点水平位移对应的A 主对角元素是;2828,k A 点周围的4个单元对有贡献。
2828,k xy 题2图1171353.(10分)弹性力学有限元中,平面等参数单元中的“等参数”概念是何意思? 该单元在跨相邻单元时,位移场连续吗? 应力场连续吗?答:在有限单元法中最普遍采用的是等参变换,即单元几何形状的变换和单元内的场函数采用相同数目的节点参数及相同的插值函数进行变换。
采用等参变换的单元称之为等参元。
所谓“等参元”是指几何形状插值形函数和单元上的位移插值形函数相同,参数个数相等。
相邻等参元之间,位移场是连续的,应力场不连续。
4.(10分)回答下列问题:(1)弹性力学平面问题8节点等参元,其单元自由度是多少个?单元刚阵元素是多少个?(2)弹性力学空间问题20节点等参元,其单元自由度是多少个?单元刚阵元素是多少个?(3)一般的平面刚架结构梁单元的自由度是多少个?单元刚阵元素是多少个?(4)一般的空间刚架结构梁单元的自由度是多少个?单元刚阵元素是多少个?答:1)自由度16个,刚阵元素16×16=256;2)自由度60个,刚阵元素60×60=3600;3)自由度6个,刚阵元素6×6=36;4)自由度12个,刚阵元素12×12=144.5.(10分)结构振动问题有限元离散的无阻尼自由振动方程为 0ΦM K 2=-)(ϖ式中是刚度矩阵,是质量矩阵,是结构固有频率,是振型n n ⨯K n n ⨯M ϖΦ向量。
2 弹性力学问题的有限单元法思考题2.1 有限元法离散结构时为什么要在应力变化复杂的地方采用较密网格,而在其他地方采用较稀疏网格?答:在应力变化复杂的地方每一结点与相邻结点的应力都变化较大,若网格划分较稀疏,则在应力突变处没有设置结点,而使得所求解的误差很大,若网格划分较密时,则应力变化复杂的地方可以设置更多的结点,从而使得所求解的精度更高一些。
2.2 因为应力边界条件就是边界上的平衡方程,所以引用虚功原理必然满足应力边界条件,对吗?答:对。
2.3 为什么有限元只能求解位移边值问题和混合边值问题?弹性力学中受内压和外压作用的圆环能用有限元方法求解吗?为什么?答:有限元法是一种位移解法,故只能求解位移边值问题和混合边值问题。
而应力边值问题没有确定的位移约束,不能用位移法求解,所以也不能用有限元法求解。
2.4 矩形单元旋转一个角度后还能够保持在单元边界上的位移协调吗?答:能。
矩形单元的插值函数满足单元内部和单元边界上的连续性要求,是一个协调元。
矩形的插值函数只与坐标差有关,旋转一个角度后各个结点的坐标差保持不变,所以插值函数保持不变。
因此矩形单元旋转一个角度后还能够保持在单元边界上的位移协调。
2.5 总体刚度矩阵呈带状分布,与哪些因素有关?如何计算半带宽? 答:因素:总体刚度矩阵呈带状分布与单元内最大结点号与最小结点号的差有关。
计算:设半带宽为B ,每个结点的自由度为n ,各单元中结点整体码的最大差值为D ,则B=n(D+1),在平面问题中n=2。
2.6 为什么单元尺寸不要相差太大,如果这样,会导致什么结果? 答:由于实际工程是一个二维或三维的连续体,将其分为具有简单而规则的几何单元,这样便于网格计算,还可以通过增加结点数提高单元精度。
在几何形状上等于或近似与原来形状,减小由于形状差异过大带来的误差。
若形状相差过大,使结构应力分析困难加大,误差同时也加大。
2.7 剖分网格时,在边界出现突变和有集中力作用的地方要设置结点或单元边界,试说明理由。
一、如图所示的1D 杆结构,试用取微单元体的方法建立起全部基本方程和边界条件,并求出它的所有解答。
注意它的弹性模量为E 、横截面积A解:如图1.1所示的1D 杆结构,其基本变量为 位移 x u 应变 x ε 应力 x σ取微单元体Adx ,其应力状态如图1.2,由泰勒展开式知()⋅⋅⋅⋅⋅+∂∂+⋅∂∂+=+22221dx x dx x dx x x x x σσσσ略去2阶以上的商阶微量知()dx xdx x xx ⋅∂∂+=+σσσ 由力的平衡知0=∑i x :0=-⎪⎭⎫ ⎝⎛∂∂+A A dx x x x x σσσ即力的平衡方程为:⋅⋅⋅⋅=0dxd xσ① 位移由图1.3知(泰勒展开,略去商阶微量)()dx xu u dx x u xx ⋅∂∂+=+ dxu dxdxdx u dx x uu ABABB A xx x x x ∂=-+-∂∂+=-=∴)(''ε应变 即几何方程为:⋅⋅⋅⋅=dxdu xx ε② 根据虎克定律知⋅⋅⋅⋅⋅⋅⋅=⋅=dxdu E E xx x εσ③ 由①、②、③知该1D 杆的基本方程为⎪⎪⎪⎩⎪⎪⎪⎨⎧====dx du E E dx du dx d x x xx xxεσεσ0 在节点1时位移:00==x x u 在节点2时应力:APlx x==σ即其边界条件为00==x x u on u SAPlx x==σ on P S 由①式知⋅⋅⋅⋅⋅=0c x σ ④ ④代入③解得:dxdu Ec x=0 ⋅⋅⋅⋅⋅⋅⋅+=10c x Ec u x ⑤ 0c 、1c 为待定系数结合边界条件知⎪⎪⎩⎪⎪⎨⎧==+A P c c x Ec 010解知得APc =0,01=c ∴⎪⎪⎪⎩⎪⎪⎪⎨⎧==⋅==EA P E x EA P u A P x xx x σεσ二、设平面问题中的应力问题y a x a a x 321++=σy a x a a y 654++=σ y a x a a xy 987++=τ其中i a (1、2、………9)为常数,令所有体积力为零,对下面特殊情况说明平衡是否满足?为什么?或者i a 之间有什么关系才满足平衡。
一。
简答题:1.轴对称体上作用正对称形式的载荷时,沿坐标,,r z θ的三个分量(,,)r P r z θ,z (,,)P r z θ和(,,)P r z θθ有何特点?(P85)(,,)r P r z θ和z (,,)P r z θ是偶函数,傅里叶级数展开式中不含sin k θ,(,,)P r z θθ是奇函数,傅里叶级数展开式中不含cos k θ。
2.某单元的节点上,既有位移自由度又有转动自由度,试述此单元的协调性要求?(P27) 在交界面上满足变形协调条件,变形后既不分裂,也不重叠,从而保证了整个结构的位移连续。
3.用泛函变分求解弹性力学的场问题时,为什么只需要考虑几何边界条件?(P179) 泛函求极值与求满足位移及力边界条件的平衡方程的解是完全等价的。
利用变分求解只需要满足位移边界条件,而力边界条件是在求解泛函的极值中自动满足的。
4.写出用位移梯度表示的格林应变张量和阿尔曼西应变张量,并证明他们的参考变形?(P201)格林应变张量1=+2j i k k ij j i i j u u u u E x x x x ∂∂∂∂∂∂∂∂(+) 阿尔曼西应变张量1=+2j i k k ij j i i ju u u u e x x x x ∂∂∂∂∂∂∂∂(-) 5.写出接触问题中的运动学条件和动力学条件?(P225)运动学条件:满足不可贯穿条件,对于两个接触物体,可表示为0ABV V ⋂=动力学条件:要求连个物体接触面的合力为零0ABq q += 二、三角形单元的位移为:012012(cos 1)(sin )(sin )(cos 1)u u x x v v x x θθθθ=+-+-=++-式中0u 和0v 分别为1x 和2x 方向的刚体位移,θ为逆时针绕原点的刚体转角。
计算单元的柯西应变和格林应变。
证明此位移为刚体运动。
(P201) 解:柯西应变:11=cos 1u x εθ∂=-∂,22=cos 1v x εθ∂=-∂,12212=+sin sin 0u v x x εθθ∂∂=-+=∂∂ 格林应变:1111111111=+(cos 1cos 1(cos 1)(cos 1)sin sin )022u u u u v v E x x x x x x θθθθθθ∂∂∂∂∂∂+-+-+--+=∂∂∂∂∂∂(+)=122121121211==+(sin sin (cos 1)(sin )sin (cos 1))022u v u u v v E E x x x x x x θθθθθθ∂∂∂∂∂∂+-++--+-=∂∂∂∂∂∂(+)=2222222211=+(cos 1cos 1(cos 1)(cos 1)sin sin )022v v u u v v E x x x x x x θθθθθθ∂∂∂∂∂∂+-+-+--+=∂∂∂∂∂∂(+)=三 周向有集中载荷作用的悬臂梁,弯曲刚度为EI ,(1)建立梁的总势能表达式,(2)假定瑞利-里茨能为2323w C x C x =+,计算梁的挠度表达式。
有限单元试题参考答案一、问答题(50分)1.(5分)有限单元位移法求解弹性力学问题的基本步骤有哪些? 1)选择适当的单元类型将弹性体离散化 2)建立单元体的位移插值函数 3)推导单元刚度矩阵4)将单元刚度矩阵组装成整体刚度矩阵 5)代入边界条件和求解2.(5分)有限元法在单元划分的时候应注意哪些问题?1)集中载荷的作用点、分布载荷的突变点和约束的支撑点都应取为结点2)在应力变化激烈的区域,单元划分得细一些,其它应力平缓的区域划分得粗一些3)为了避免在计算中产生过大的误差,单元的长细比最好不要大于23.(5分)有限元法中建立位移函数一般有广义坐标法和插值函数法,我们经常用插值函数的哪些性质来直接建立位移函数? 1)形函数与位移插值函数是相同次数的多项式2)形函数N i 在结点i 处等于1,在其它结点上的值等于0 3)在单元任意一点,三个形函数之和为14.(10分)在有限元法中,单元刚度矩阵和整体刚度矩阵具有哪些性质?1)单元刚度矩阵每一列元素表示一组平衡力系,对于平面问题每列元素之和为零2)单元刚度矩阵对角线元素总为正 3)单元刚度矩阵为对称矩阵 4)单元刚度矩阵为奇异矩阵整体刚度矩阵前三条性质和单元刚度矩阵一样。
另外: 1) 整体刚度矩阵为奇异矩阵,排除刚体位移后为正定矩阵 2)整体刚度矩阵是带状矩阵5.(5分)什么是等参数单元?它与三角形单元和矩形单元相比有哪些优势? 1)在建立局部坐标系下的形状规则的标准单元与整体坐标系下形状复杂的实际单元之间的变换时,如果坐标变换函数中的形函数及插值结点与描述单元位移函数的形函数及插值结点完全相同,则这种变换我们成为等参数变换,当中的实际单元单元称为等参数单元。
(其它描述意思一样也可)2)三角形单元和矩形单元不能适应复杂的曲线边界,等参数单元可以。
6.(10分)平面三角形单元与轴对称问题的三角形截面单元的不同之处在哪里?轴对称问题三角形截面单元刚度方程的推导当中,为了简化计算和消除在对称轴上r=0引起的麻烦,可怎样处理?1)平面三角形单元的三个应力分量xy y xτσσ和三个应变分量xy y γεεx 都为常量,是常应变单元也是常应力单元。
合肥工业大学工程力学专业《工程结构数值方法》2008年试卷A 答案2008年5月11 日上午考试(共8题,满分100分),考试时间:120分钟适用专业:工程力学05-1(本科),出题人:牛忠荣1.(8分)线弹性力学静力学问题有限元法计算列式的理论推导是如何采用弹性力学问题基本方程?答:弹性力学有限元的基本过程是:1. 假设单元的位移场模式 }]{[}{e N f δ=2. 代入到几何方程得到 }]{[}{eB δε=3. 代入到物理方程得到}]{][[}{eB D δσ= 4. 代入到虚功方程,得到单元刚度方程}]{[][ee k F δ= 5. 叠加到总刚阵,得到结构的平衡方程}]{[][e e k F δ= 6. 引入位移边界条件后,解第5步得到的方程组,可以得到结点位移2.(12分)用有限元法计算图示平面刚架时, 试求:(1) 如何进行结点编号,使系统总刚度矩阵K 的带宽最小? (2) 计算在你的结点编号下的系统总刚阵K 的半带宽。
(3) 在结点编号确定后,按此顺序进行自由度编号,则图中A 结点水平位移对应的主对角元素在总刚阵K 中的列和行位置是多少? 那些单元对该元素的数值有贡献? 答:(1)见图;(2)半带宽=15143=+)(; (3)A 结点水平位移对应的主对角元素是2828,k ; A 点周围的4个单元对2828,k 有贡献。
xy 题2图13171353.(10分)弹性力学有限元中,平面等参数单元中的“等参数”概念是何意思? 该单元在跨相邻单元时,位移场连续吗? 应力场连续吗?答:在有限单元法中最普遍采用的是等参变换,即单元几何形状的变换和单元内的场函数采用相同数目的节点参数及相同的插值函数进行变换。
采用等参变换的单元称之为等参元。
所谓“等参元”是指几何形状插值形函数和单元上的位移插值形函数相同,参数个数相等。
相邻等参元之间,位移场是连续的,应力场不连续。
4.(10分)回答下列问题:(1) 弹性力学平面问题8节点等参元,其单元自由度是多少个?单元刚阵元素是多少个?(2) 弹性力学空间问题20节点等参元,其单元自由度是多少个?单元刚阵元素是多少个?(3) 一般的平面刚架结构梁单元的自由度是多少个?单元刚阵元素是多少个?(4) 一般的空间刚架结构梁单元的自由度是多少个?单元刚阵元素是多少个?答:1)自由度16个,刚阵元素16×16=256;2)自由度60个,刚阵元素60×60=3600; 3)自由度6个,刚阵元素6×6=36; 4)自由度12个,刚阵元素12×12=144. 5.(10分)结构振动问题有限元离散的无阻尼自由振动方程为 0ΦM K 2=-)(ϖ式中n n ⨯K 是刚度矩阵,n n ⨯M 是质量矩阵,ϖ是结构固有频率,Φ是振型向量。
试问为什么从上式求出的特征对<i i Φ,ϖ> (n i ,,2,1 =)中,只有前若干低阶频率和相应振型是可靠的,误差较小。
答:在有限单元法中,采用低阶多项式拟合振型。
结构的低阶振型曲线与低阶多项式比较通配,结构的高阶振型曲线与低阶多项式曲线有着显著的差异。
因而,有限元法中求出的低阶频率和振型是可信的,而所求出的高阶频率和振型误差较大,甚至无效。
6.(7分)用有限元法求结构的动力响应通常有振型叠加法和逐步积分法,试问该两种方法的优缺点。
答:振型叠加法适应于求解线性振动问题,需要计算结构的固有频率和振型。
适合于时间较长求解。
逐步积分法可用于非线性振动问题的求解,不必需要计算结构的固有频率和振型。
适合于时间较短的问题求解,当时间长时计算量大。
7. (25分)图示矩形薄板m m 12⨯,厚度m h 1.0=。
载荷及约束信息如图示,泊松比20/,0m N E E ==μ,N P 10=,板的重量密度为330m /N =γ,沿y 轴负向。
试采用三角形常应变元求: (1)建立适宜的有限元计算模型; (2)结构系统的等效结点力列阵;(3)采用划行划列法引入已知结点位移,计算出结点3和4的位移; (4)单元1和2的各应力分量。
( 建议单元编号:i j m 单元1:3 4 2 单元2:2 1 3 )解:计算模型题7图题7图单元1的等效结点力:结点 3 4 2N .hA TT )()(10101050101010311---=---=γF单元2的等效结点力:结点 2 1 3N .hA TT )()(10101050101010312---=---=γF结构整体等效结点力结点 1 2 3 4N ..T)(5006010500----=F单元1:11050=-==-==m j m j i b ,b ,y y b ,.∆ 011=-==+-=m j m j i c ,c ,x x c 单元2:11050-===-==m j m j i b ,b ,y y b ,.∆ 011==-=+-=m j m j i c ,c ,x x c单元1应力矩阵结点 3 4 2⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=500500010105005001010001....E S ; 单元2应力矩阵结点 2 1 3⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=500500010105005001010002....E S ; 单元1刚度矩阵:单元1:11050=-==-==m j m j i b ,b ,y y b ,.∆011=-==+-=m j m j i c ,c ,x x c⎥⎦⎤⎢⎣⎡=1005020.h E ii k , ⎥⎦⎤⎢⎣⎡---=10505020..h E ij k ,⎥⎦⎤⎢⎣⎡=0050020.h E im k ⎥⎦⎤⎢⎣⎡=5150505120....h E jj k ,⎥⎦⎤⎢⎣⎡---=50050120..h E jm k ⎥⎦⎤⎢⎣⎡=5000120.h E mm k3 4 2⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------=500010500515050150510010105005050050201...........h E k ⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧243;2 1 3⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------==5000105005150501505100101050050500502012...........h E k k ⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧312; 叠加总刚阵:结点号: 1 2 3 4⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----=+=515050511051050500512021........hE k k K ⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧4321 已知结点位移:0214321======v v u u u u⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----5150505110510505005120........h E ⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧44332211v u v u v u v u=⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧----5006010500..; 采用划行划列,得到)(-62051043⨯=-E v v . )(-+-502051043.E v .v ⨯=解得结点位移:03152E /v -= , 04108E /v -= 。
代入:e S δσ=得单元应力(常应力):2154460m /N xy y x ⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=τσσσ , 225400m /N xy y x ⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=τσσσ 。
8.(18分)图示正方形薄板,厚度m h 1.0=,边长m a 1=。
约束信息如图示,板的质量密度为303m /kg =ρ,泊松比0=μ,弹性模量22m /N E =,取210s /m g =。
不计系统阻尼,试采用图示的2个三角形常应变元求:(1)引入已知结点位移后,结构系统的刚度矩阵和一致质量矩阵;(2)结构自由振动方程;(3)计算结构的固有频率。
解:⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=105005000105005050010500050010505005001005005001121............h ρM ⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧243;题8图⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=105005000105005050010500050010505005001005005001122............h ρM ⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧312;⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=+=105000105050020050021221....h ρM M M ⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧4321⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=511151101511151200....E K ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=15050241250502120....ρM 系统自由振动方程:取202m /N E =,kg 03=ρ,则⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎦⎤⎢⎣⎡-⎩⎨⎧⎥⎦⎤⎢⎣⎡--001505024151115110143v v ....λ 令 40./λη=,则0515********=------).(..).(ηηηη, ηλω40.==0501512512=+---).().)(.(ηηη 052272=+-ηη24701.=η,922.=η 31401.=ω,07712.=ω。
(完)。