第三章几何非线性
- 格式:ppt
- 大小:1.54 MB
- 文档页数:77
空间几何的非线性变换空间几何是研究几何对象在三维空间中的性质和变换的一个分支。
线性变换是空间几何中非常重要的一种变换,它能够保持点、线或者平面的位置、方向、长度和角度等性质不变。
然而,在实际应用中,很多情况下需要进行非线性变换,例如在计算机图形学、计算机视觉、自然语言处理等领域就需要对图像、语言等非线性信息进行处理。
本文将重点介绍空间几何的非线性变换。
1. 刚体变换刚体变换是最简单的非线性变换之一。
刚体变换包括平移、旋转和镜像三种基本操作,它们能够保持点之间的距离和夹角不变。
例如,二维平面上的一条直线,如果进行平移、旋转、镜像操作后,依然是一条直线。
当然,在三维空间中进行刚体变换需要更复杂的运算。
刚体变换在计算机图形学的建模和动画制作中有广泛的应用。
2. 仿射变换仿射变换是一种保持直线平行的非线性变换。
它包括平移、旋转、比例和错切四种基本操作。
仿射变换能够保持平面上的点、线和平面的位置和方向不变。
对于一个不共线的三角形,它经过仿射变换后仍然是一个三角形。
仿射变换在计算机视觉、机器学习等领域有很多应用,例如在图像对齐、文本识别和人脸识别中都需要进行仿射变换。
3. 投影变换投影变换是指将三维空间中的物体映射到二维平面上的过程。
投影变换可以是线性和非线性的,其中较常用的是透视投影和正交投影。
透视投影是一种模拟人眼看物体的方法,它能够产生近大远小的效果,常用于3D建模、游戏开发和虚拟现实等领域。
正交投影能够保持物体的形状和大小不变,常用于制作工程图和CAD软件中。
4. 变形变换变形变换是一种将物体进行形状变换的非线性变换。
变形变换包括弯曲、扭曲、拉伸等形变操作,它能够改变物体的形状和大小。
例如,在计算机图形学中,可以使用变形变换对人脸进行变形,从而实现面部表情的动态模拟。
总之,空间几何的非线性变换在现代科技中有着广泛和重要的应用。
通过对非线性变换的研究,我们能够更好地理解和利用三维空间中的几何信息。
未来,随着技术的不断发展和进步,空间几何的非线性变换将会在更广泛的领域中得到应用。
论析斜拉桥几何非线性的解法斜拉桥的结构分析与传统的连续梁和刚构桥的结构分析相比,几何非线性的影响显著,特别是特大跨径的斜拉桥,几何非线性效应尤为突出。
斜拉桥几何非线性影响因素概括为3个方面:(1)斜拉索自重垂度引起的拉索拉力与变形之间的非线性关系;(2)大位移产生的结构几何形状变化引起的几何非线性效应;(3)由于斜拉索的拉力作用,主梁和索塔不仅承受弯矩而且还将承受巨大的轴向力,在主梁和索塔变形过程中,由于轴向力和弯矩相互影响,而产生所谓的梁一柱效应(P -△效应),使整个斜拉桥结构表现出几何非线性行为。
斜拉索的模拟有许多种方法,而应用最为普遍的则属等效弹性模量法,运用Ernst公式进行弹性模量的修正,详细介绍了等效弹性模量法的原理。
1.大跨度斜拉桥几何非线性效应的有限元解法1.1非线性方程的求解几何非线性有限元平衡方程,能够用全量列式法式和增量列式法式(实际上是微分方程表示法)2种方法表示。
从数学角度来看,其实质都是非线性方程。
目前,非线性方程主要的解法有:简单增量法、迭代法、增量迭代混合法、一阶自校正方法、二阶自校正方法、摄动法等。
本文采用迭代法,其迭代过程见图1 (3)索单元的刚度矩阵。
由于索单元比较特殊,一般采用等效刚度的修正弹性模量法。
该法是1965年由德国学者Ernst提出的,被总结为Ernst公式[3]:分析表明,对于承受较大拉应力、索长不是太长的普通斜拉索相差不大,采用的Ernst公式形成索单元刚度能满足工程要求。
以上的常见单元切线刚度矩阵,集合当前状态下所有单元刚度矩阵就可以形成当前状态下结构的切线刚度矩阵。
1.3不平衡力的求解1.4迭代流程对于大跨度斜拉桥,一个典型的迭代循环包括:(1)利用整体坐标下的节点位移单元的局部坐标;(2)计算在局部坐标下各单元的位移列阵,建立在局部坐标下的各单元刚度矩阵,并计算节点力;(3)利用索单元已求得的内力,用Ernst公式修正索单元弹性模量;(4)变换和到整体坐标下的和;(5)集合各单元刚度矩阵,形成结构的整体刚度矩阵,矩阵就是当时变形位置的结构刚度矩阵;(6)计算各单元并且算出不平衡力,作用到节点上的力它就是;(7)求解结构平衡方程式得到位移增量,将位移增量加到前次迭代中累积起来的节点位移中去,这就给出节点位移的新的近似值;(8)检查收敛性,如果不满足,返回到步骤1,直至趋向于零为至。
ANSYS几何非线性概述一、什么是非线性什么是非线性(non-linear)?按照百度百科的解释,非线性是指变量之间的数学关系不是直线而是曲线、曲面或不确定的属性。
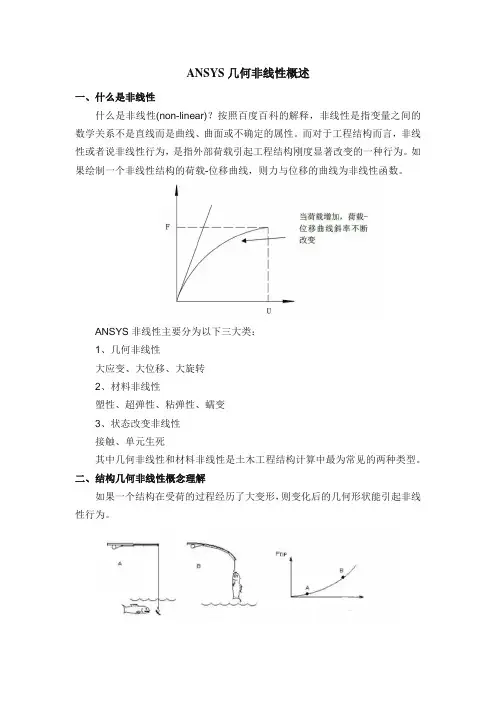
而对于工程结构而言,非线性或者说非线性行为,是指外部荷载引起工程结构刚度显著改变的一种行为。
如果绘制一个非线性结构的荷载-位移曲线,则力与位移的曲线为非线性函数。
ANSYS非线性主要分为以下三大类:1、几何非线性大应变、大位移、大旋转2、材料非线性塑性、超弹性、粘弹性、蠕变3、状态改变非线性接触、单元生死其中几何非线性和材料非线性是土木工程结构计算中最为常见的两种类型。
二、结构几何非线性概念理解如果一个结构在受荷的过程经历了大变形,则变化后的几何形状能引起非线性行为。
例如,上述例子,杆梢在轻微横向作用下是柔软的,当外部横向荷载加大时,杆的几何形状发生改变,力矩臂减小,引起杆的刚化响应。
几何非线性主要分为如下三种现象:1.单元的形状改变(面积、厚度),其单独的单元刚度也将改变2.单元的取向发生转动,其局部刚度在转化为全局分量时将会发生变化。
3.单元应变产生较大的平面内应力状态引起平面法向刚度的改变。
随着垂直挠度UY 的增加,较大的膜应力SX 将会导致刚化效应。
上述三种情况的关系如下:应力刚化三、ANSYS几何非线性注意事项1、建模注意事项 (a )单元选择注意事项在定义单元类型时,应明白如果分析的过程中有几何非线性,应确保所选单元类型支持相应的几何非线性效应。
例如shell63单元支持应力刚化和大挠度,但不支持大应变;而shell181则支持所有的三类几何非线性,可在单元描述的特殊特征列表中找到类似信息。
特别是在选择接触单元的时候应慎重,有的接触单元是没有任何非线性能力,例如CONTAC52.同时应注意剪切锁定以及体积锁定等不可压缩性所带来的收敛困难。
(b )预见网格扭曲ANSYS 在第一迭代之前,会检查网格的质量;在大应变分析中,迭代计算过后的网格或许会变得严重扭曲,为防止出现不良形状,可以预见网格扭曲从而修改原始网格。
几何非线性力学中的定解问题研究几何非线性力学是以物体的形状和变形为主要研究对象,涉及到多个学科的交叉,如数学、力学、材料科学等。
其中,定解问题是研究重要的方向之一。
本文旨在简要介绍几何非线性力学中的定解问题研究。
一、定解问题概述定解问题是研究微分方程的重要领域,从物理学的角度来讲,定解问题是描述力学系统的运动规律,因此在几何非线性力学中,定解问题也是研究物体受力时的变形与运动规律的重要工具。
在几何非线性力学中,一般研究以下两类定解问题:1.初值问题初值问题是指在某一时刻,物体的形状与位置已知,要求预测在后续时间内的形状和位置的变化情况。
这类问题通常用泰勒级数来进行近似求解,但是要求计算过程中不受舍入误差的影响,也需要对误差进行估计和控制。
2.边值问题边值问题是指在一个密闭区域内,物体受到一定约束力的情况下,求解物体的形状与运动规律。
这类问题通常需要建立较为复杂的数学模型,涉及到微分方程、变分原理等多种数学工具。
二、定解问题的数学模型与求解方法几何非线性力学中的定解问题,有时需要建立复杂的非线性微分方程,因此需要借助于数值计算方法来进行求解。
目前常用的数值计算方法有以下几类:1.差分法差分法是一种离散化求解微分方程的方法,将空间和时间分为若干个网格,根据物体的受力情况,利用有限差分法来逼近微分方程的解。
这种方法简单易行,在一些简单的模型中表现良好。
2.有限元法有限元法是一种将物体分割成有限个单元,建立每个单元的形状函数和位移函数,从而建立起整个物体的数学模型。
这种方法具有一定的通用性,在处理非线性问题时有很好的效果。
3.辛普森法辛普森法是一种以积分为基础的数值计算方法,通过对微分方程的积分逼近来求解方程的解。
辛普森法具有高精度和高效率的特点,但在处理非线性问题时,需要对误差进行较为精细的控制。
三、应用与展望几何非线性力学中的定解问题广泛应用于材料科学、工程力学、地质力学等各个领域,在地震预测、纳米器件设计等领域具有重要的应用价值。
几何非线性分析第1页几何非线性分析随着位移增长随着位移增长,,一个有限单元已移动的坐标可以以多种方式改变结构的刚度。
一般来说这类问题总就是就是非线性的度。
一般来说这类问题总就是就是非线性的,,需要进行迭代获得一个有效的解。
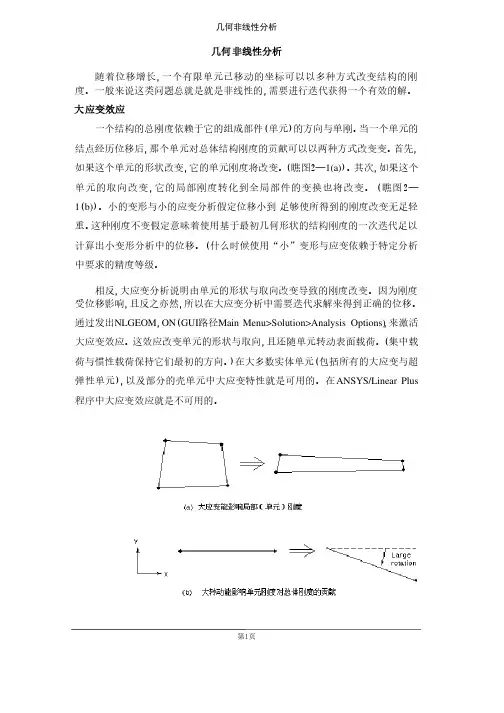
大应变效应一个结构的总刚度依赖于它的组成部件一个结构的总刚度依赖于它的组成部件((单元单元))的方向与单刚。
当一个单元的结点经历位移后结点经历位移后,,那个单元对总体结构刚度的贡献可以以两种方式改变变。
首先首先,,如果这个单元的形状改变如果这个单元的形状改变,,它的单元刚度将改变。
(瞧图瞧图22─1(a))。
其次其次,,如果这个单元的取向改变单元的取向改变,,它的局部刚度转化到全局部件的变换也将改变。
(瞧图瞧图22─1(b))。
小的变形与小的应变分析假定位移小到足够使所得到的刚度改变无足轻重。
这种刚度不变假定意味着使用基于最初几何形状的结构刚度的一次迭代足以计算出小变形分析中的位移。
计算出小变形分析中的位移。
((什么时候使用“小”变形与应变依赖于特定分析中要求的精度等级。
相反相反,,大应变分析说明由单元的形状与取向改变导致的刚度改变。
因为刚度受位移影响受位移影响,,且反之亦然且反之亦然,,所以在大应变分析中需要迭代求解来得到正确的位移。
通过发出NLGEOM ,ON (GUI 路径Main Menu>Solution>Analysis Options),来激活大应变效应。
这效应改变单元的形状与取向这效应改变单元的形状与取向,,且还随单元转动表面载荷。
(集中载荷与惯性载荷保持它们最初的方向。
)在大多数实体单元在大多数实体单元((包括所有的大应变与超弹性单元弹性单元),),),以及部分的壳单元中大应变特性就是可用的。
在以及部分的壳单元中大应变特性就是可用的。
在ANSYS/Linear Plus 程序中大应变效应就是不可用的。
图1─11 大应变与大转动大应变与大转动大应变处理对一个单元经历的总旋度或应变没有理论限制。
几何非线性
1)几何非线性一般是由于变形后的状态与变形之前相差较大,必须
在变形后的状态下重新建立物体的平衡方程,来保证问题的准确性,主要
包括——大挠度、大转动、大曲率三种:
2)几何非线性的计算方法有两种——TL方法(完全拉格朗日方法)、UL方法(更新拉格朗日方法),其中UL方法的平衡是建立在变形后坐标
系上,具有更强的适用性,如下图:
3)和材料非线性问题相比,几何非线性问题有更为复杂多样的荷载-
位移的平衡路径,存在荷载控制下的位移跳跃和位移控制下的荷载跌落,
如下图:
4)对于这种具有负斜率的荷载-位移曲线,能够解决的求解算法是——弧长法,防止了一般基于增量法的牛顿-辛普森方法的双折返现象,其
越过顶峰的示意图如下:
5)接下来的文章,将通过例如轴对称固支圆板的几何非线性分析,
就该问题做更详细的说明:。
第三部分非线性分析第一章非线性有限元概述1.1非线性行为1、 非线性结构的基本特征是结构刚度随载荷的改变而变化。
如果绘制一个非线 性结构的载荷一位移曲线,则 力与位移的关系是非线性函数。
2、 引起结构非线性的原因:a 几何非线性:大应变,大位移,大旋转 (例如钓鱼竿的变形)b 材料非线性:塑性,超弹性,粘弹性,蠕变c 状态改变非线性:接触,单元死活3、 非线性行为一一分析方法特点A 不能使用叠加原理!B 结构响应与路径有关,也就是说加载的顺序可能是重要的。
C 结构响应与施加的载荷可能不成比例。
1.2非线性分析的应用1、 一些典型的非线性分析的应用包括: 非线性屈曲失稳分析金属成形研究碰撞与冲击分析制造过程分析(装配、部件接触等)材料非线性分析 (塑性材料、聚合物)2、 橡胶底密封:一个包含几何非线性(大应变与大变形),材料非线性(橡胶), 及状态非线性(接触)的例子。
2.1非线性方程组的解法1、求解一个结构的平衡问题通常等于求解结构的总位能的驻值 问题。
结构总位能n : 口 "3弋门心 2、 增量法:就是将荷载分成一系列的荷载增量,即 ANSYS 中的荷载步或荷载子 步。
A 要点:在每一个荷载增量求解完成后,继续进行下一个荷载增量之前, 刚度矩阵以反映结构刚度的变化。
B 增量法的优点:可以追踪结构变形历程,这对于材料或几何非线性(特别是 极限值屈曲分析)十分有用。
C 增量法的缺点:随着荷载步增量的增加而产生积累误差,导致荷载-位移曲 线飘移。
D 对飘移进行平衡修正,可以大大提高增量法的精度。
应用最广的就是在每一 级载荷增量上用Newton-Raphsor 或其变形的迭代法。
3、 迭代法:割线刚度法:收敛性差,因此很少应用切线刚度法Newto n-Ra phsor 迭代法:切向刚度法中 2.2 Newto n-Ra phsor 迭代法 1、 优点:对于一致的切向刚度矩阵有 二次收敛速度。
什么叫几何非线性?几何非线性的特点是结构在载荷作用过程中产生大的位移和转动。
如板壳结构的大挠度,此时材料可能仍保持为线弹性状态,但是结构的几何方程必须建立于变形后的状态,以便考虑变形对平衡的影响。
同时由于实际发生的大位移、大转动,使几何方程再也不能简化为线性形式,即应变表达式中必须包含位移的二次项。
稳态响应在某一输入信号的作用后,时间趋于无穷大时系统的输出状态称为稳态响应。
瞬态响应系统在某一典型信号输入作用下,其系统输出量从初始状态到稳定状态的变化过程固体粘性指与时间有关的变形性质,蠕变和应力松弛都是与粘性有关的力学现象。
几乎所有固体材料都有粘性。
有些情况下,粘性对材料力学性能的影响小到可以忽略,但某些聚合物、岩土材料以及处于高速变形状态下的金属材料则具有明显的粘性。
粘塑性体具有塑性和粘性的物体称为为什么平面问题的截面属性是实心体?ABAQUS/CAE推荐的建模方法是把整个数值模型(材料、边界条件)都直接定义在几何模型上,而不是像其他前处理器那样定义在单元和节点上?1、ABAQUS模型中的6个自由度,其中的坐标中编号是1.2.3而不是常用的X.Y.Z。
因为模型的坐标系也可以是主坐标系或球坐标系等。
边界条件的定义方法主要有两种,这两种方法可以混合使用:自由度1(U1):沿坐标轴1方向上的平移自由度。
自由度2(U2):沿坐标轴2方向上的平移自由度。
自由度3(U3):沿坐标轴3方向上的平移自由度。
自由度4(UR1):沿坐标轴1上的旋转自由度。
自由度5(UR1):沿坐标轴2上的旋转自由度。
自由度6(UR1):沿坐标轴3上的旋转自由度。
2、约定的边界条件类型:XSYMM:对称边界条件,对称面为与坐标轴1垂直的平面,即U1=UR2=UR3=0; YSYMM:对称边界条件,对称面为与坐标轴2垂直的平面,即U2=UR1=UR3=0; ZSYMM:对称边界条件,对称面为与坐标轴3垂直的平面,即U3=UR1=UR2=0; XASYMM:反对称边界条件,对称面为与坐标轴1垂直的平面,即U2=U3=UR1=0; YASYMM:反对称边界条件,对称面为与坐标轴2垂直的平面,即U1=U3=UR2=0; ZASYMM:反对称边界条件,对称面为与坐标轴3垂直的平面,即U1=U2=UR3=0; PINNED:约束所有平移自由度,即U1=U2=U3=0;ENCASTRE:约束所有自由度(固支边界条件),即U1=U2=U3=UR1=UR2=UR3=0. Abaqus中部件(Part)、实体(Instance)和集合(Assembly)的关系收藏1、部件(Part)、实体(Instance)和集合(Assembly)的关系(13.3.1)一个模型(Model)能包括很多部件(Part),然而,它却只能包含一个集合(Assembly)。
MIDAS几何非线性理论知识当结构的变形相对杆件长度已不能忽略时,为了在结构变形后的形状上建立平衡,并考虑初始缺陷对结构屈曲承载力的影响,必须对结构进行基于大挠度理论的非线性屈曲分析。
在midas中可以这样处理:对于索结构或张悬梁结构中,定义的只受拉索单元并不能进行特征值分析,因为其只能定义在几何非线性分析中。
如要进行特征值分析,那么要将只受拉索单元转换为只受拉桁架单元。
先对该结构进行几何非线性,得出自重作用下的初始索力,然后将索单元定义为只受拉桁架单元,将计算所得的索力按初始荷载加到单元中:荷载,>初始荷载,>小位移,>初始单元内力加入张力。
1、问:在MIDAS 中如何计算自重作用下活荷载的稳定系数(屈曲分析安全系数)? 答:稳定分析又叫屈曲分析,所谓的荷载安全系数(临界荷载系数)均是对应于某种荷载工况或荷载组合的。
例如:当有自重W 和集中活荷载P 作用时,屈曲分析结果临界荷载系数为10 的话,表示在10*(W+P)大小的荷载作用下结构可能发生屈曲。
但这也许并不是我们想要的结果。
我们想知道的是在自重(或自重+二期恒载)存在的情况下,多大的活荷载作用下会发生失稳,即想知道W+Scale*P 中的Scale 值。
我们推荐下列反复计算的方法。
步骤一:先按W+P 计算屈曲分析,如果得到临街荷载系数S1。
步骤二:按W+S1*P 计算屈曲,得临界荷载系数S2。
步骤二:按W+S1*S2*P 计算屈曲,得临界荷载系数S3。
重复上述步骤,直到临街荷载系数接近于1.0,此时的S1*S2*S3*Sn 即为活荷载的最终临界荷载系数。
(参见下图)midas官方网站的说话,供大家参考:考虑几何非线性同时进行稳定分析可以实现。
方法如下:1、将进行稳定分析所用荷载定义在一个荷载工况下;2、定义非线性分析控制,选择几何非线性,在非线性分析荷载工况中添加此荷载工况,并对其定义加载步骤;3、分析;4、查看结果中的阶段步骤时程图表,查找变形发生突变的位置点,及加载系数,即可推知发生失稳的极限荷载。
第22卷 第12期2005年12月 公 路 交 通 科 技Journal of Highway and T ransportation Research and DevelopmentV ol 122 N o 112 Dec 12005文章编号:1002Ο0268(2005)12Ο0075Ο03收稿日期:2004Ο09Ο13作者简介:罗喜恒(1969-),男,福建上杭人,高级工程师,工学博士,主要研究方向为大跨径桥梁的结构分析与施工控制1(luoxh @eastday 1com )几何非线性问题求解的改进算法罗喜恒,肖汝诚,项海帆(同济大学桥梁工程系,上海 200092)摘要:Newton ΟRaphs on 法和荷载增量法是求解几何非线性问题的两种常用方法。
作为对这两种方法的补充,提出了将不平衡力向量在一个荷载步内逐级施加的改进算法,同时通过设置前后迭代循环单元轴向力的收敛精度改进了CR 列式平面梁单元的多次循环迭代法。
计算表明,这种方法对某些场合,如悬索桥的施工过程分析等,可取得很好的收敛效果,并能与已有的各种方法有机地结合起来。
关键词:非线性分析;Newton ΟRaphs on 法;荷载增量法;不平衡力向量中图分类号:O343;U448125 文献标识码:AImproved Method for Geometrically Nonlinear AnalysisLUO Xi Οheng ,XIAO Ru Οcheng ,XIANG Hai Οfan(Department of Bridge Engineering ,T ongji University ,Shanghai 200092,China )Abstract :Newton ΟRaphs on Method and load increment method are tw o main methods for geometrically nonlinear analysis 1As a com ple 2ment for those methods ,an im proved method ,which divides the unbalanced force vector into prescribed parts and makes them act gradu 2ally in one load step ,was proposed 1The n Οcycle iteration scheme for 2ΟD beam element based on CR formulation was als o im proved by controlling the difference between the element axial force of current cycle and that of previous cycle 1This method is proved to be able to im prove convergence properties of the equilibrium iteration in s ome cases ,for exam ple in the construction process analysis of suspension bridge ,and can be easily used in combination with other methods 1K ey words :N onlinear analysis ;Newton ΟRaphs on Method ;Load increment method ;Unbalanced force vector0 引言对于几何非线性问题,平衡条件必须建立在预先未知的变形后的几何位置上,因此,通常需要通过迭代过程来求解[1]。
当结构的变形相对杆件长度已不能忽略时,为了在结构变形后的形状上建立平衡,并考虑初始缺陷对结构屈曲承载力的影响,必须对结构进行基于大挠度理论的非线性屈曲分析。
在midas中可以这样处理:对于索结构或张悬梁结构中,定义的只受拉索单元并不能进行特征值分析,因为其只能定义在几何非线性分析中。
如要进行特征值分析,那么要将只受拉索单元转换为只受拉桁架单元。
先对该结构进行几何非线性,得出自重作用下的初始索力,然后将索单元定义为只受拉桁架单元,将计算所得的索力按初始荷载加到单元中:荷载->初始荷载->小位移->初始单元内力加入张力。
1、问:在MIDAS 中如何计算自重作用下活荷载的稳定系数(屈曲分析安全系数)?答:稳定分析又叫屈曲分析,所谓的荷载安全系数(临界荷载系数)均是对应于某种荷载工况或荷载组合的。
例如:当有自重W 和集中活荷载P 作用时,屈曲分析结果临界荷载系数为10 的话,表示在10*(W+P)大小的荷载作用下结构可能发生屈曲。
但这也许并不是我们想要的结果。
我们想知道的是在自重(或自重+二期恒载)存在的情况下,多大的活荷载作用下会发生失稳,即想知道W+Scal e*P 中的Scal e 值。
我们推荐下列反复计算的方法。
步骤一:先按W+P计算屈曲分析,如果得到临街荷载系数S1。
步骤二:按W+S1*P 计算屈曲,得临界荷载系数S2。
步骤二:按W+S1*S2*P 计算屈曲,得临界荷载系数S3。
重复上述步骤,直到临街荷载系数接近于1.0,此时的S1*S2*S3*Sn即为活荷载的最终临界荷载系数。
(参见下图)mida s官方网站的说话,供大家参考:考虑几何非线性同时进行稳定分析可以实现。
方法如下:1、将进行稳定分析所用荷载定义在一个荷载工况下;2、定义非线性分析控制,选择几何非线性,在非线性分析荷载工况中添加此荷载工况,并对其定义加载步骤;3、分析;4、查看结果中的阶段步骤时程图表,查找变形发生突变的位置点,及加载系数,即可推知发生失稳的极限荷载。