机械工程控制基础习题第四章 】
- 格式:pdf
- 大小:1.28 MB
- 文档页数:21
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正, 可保持液面高度稳定。
《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用)。
P2A.反馈作用B.前馈作用C.正向作用D.反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B.干扰输入端C.控制器输出端D.系统输出端3.闭环系统在其控制器和被控对象之间有(反向作用)。
P3A.反馈作用B.前馈作用C.正向作用D.反向作用A.输入量B.输出量C.反馈量D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2-3A.偏差的过程B.输入量的过程C.干扰量的过程D.稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B.稳定系统C.时域系统D.频域系统6.闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A.给定环节B.比较环节C.放大环节D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C.输出量反馈到输入端参与控制D.输出量局部反馈参与控制8.随动系统要求系统的输出信号能跟随(C的变化)。
P6A.反馈信号B.干扰信号C.输入信号D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A.局部反馈B.主反馈C.正反馈D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A.开环控制系统B.闭环控制系统C.反馈控制系统D.非线性控制系统11.自动控制系统的反馈环节中一般具有(B )。
p5A..给定元件B.检测元件C.放大元件D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B.准确性C. 稳定性D.动态性13.输出量对系统的控制作用有直接影响的系统是(B )p3A.开环控制系统B.闭环控制系统C.线性控制系统D.非线性控制系统14.通过动态调节达到稳定后,被控量与期望值一致的控制系统为(无差系统)。
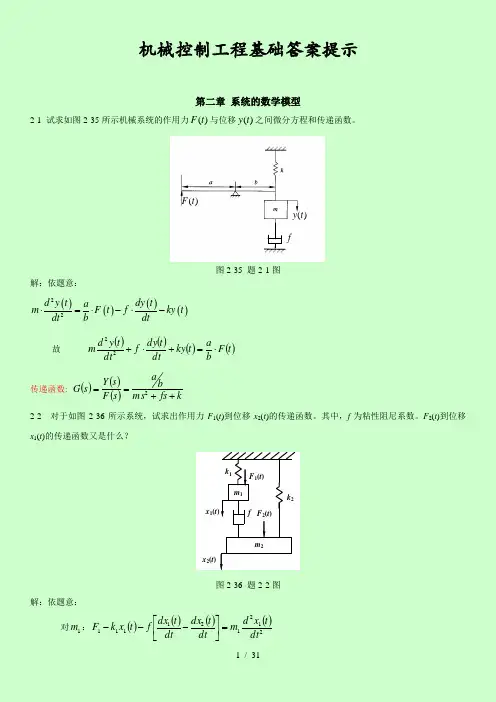
机械控制工程基础答案提示第二章 系统的数学模型2-1 试求如图2-35所示机械系统的作用力)(t F 与位移)(t y 之间微分方程和传递函数。
)(t F )(t y f图2-35 题2-1图解:依题意:()()()()22d y t dy t a m F t f ky t dt b dt ⋅=⋅-⋅-故 ()()()()t F b at ky dt t dy f dt t y d m ⋅=+⋅+22 传递函数: ()()()kfs m s b as F s Y s G ++==22-2 对于如图2-36所示系统,试求出作用力F 1(t )到位移x 2(t )的传递函数。
其中,f 为粘性阻尼系数。
F 2(t )到位移x 1(t )的传递函数又是什么?m 2m 1k 1 f k 2F 1(t )F 2(t ) x 2(t )x 1(t )图2-36 题2-2图解:依题意:对1m :()()()()212121111dt t x d m dt t dx dtt dx f t x k F =⎥⎦⎤⎢⎣⎡---对两边拉氏变换:()()()[]()s X s m s sX s sX f x k s F 12121111=---①对2m :()()()()()222222212dt t x d m t x k dt t dx dt t dx f t F =-⎥⎦⎤⎢⎣⎡-+ 对两边拉氏变换:()()()[]()()s X s m s x k s sx s sx f s F 22222212=--+②故: ()()()()()()()()⎩⎨⎧=+++-=-++S F s x k fs s m s fsx s F s fsx s x k fs s m 222221121121 故得:()()()()()()()()()()()()()()⎪⎪⎩⎪⎪⎨⎧-+++++++=-+++++++⋅=22221212212122222121222211fs k fs s m k fs s m k fs s m s F s fsF s x fs k fs s m k fs s m s fsF k fs s m s F s x 故求()t F 1到()t x 2的传递函数令:()02=s F()()()()()()()()()2122211122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++求()t F 2到()t x 1的传递函数 令:()01=s F()()()()()()()()()1122221122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++2-3 试求图2-37所示无源网络传递函数。
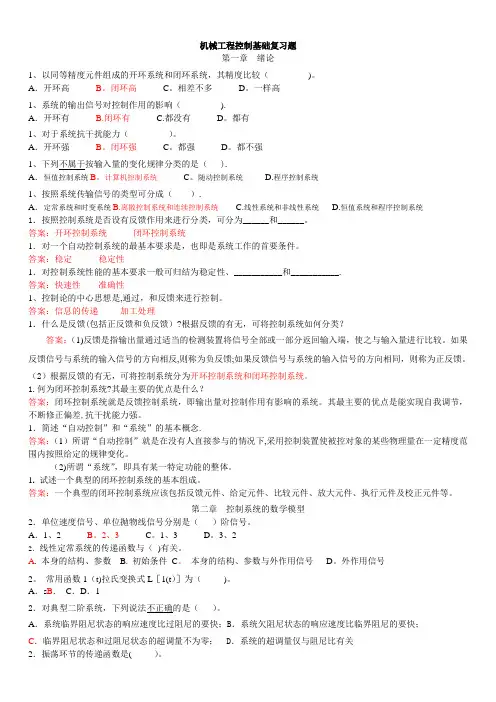
机械工程控制基础复习题第一章绪论1、以同等精度元件组成的开环系统和闭环系统,其精度比较()。
A.开环高B。
闭环高C。
相差不多D。
一样高1、系统的输出信号对控制作用的影响().A.开环有 B.闭环有 C.都没有D。
都有1、对于系统抗干扰能力()。
A.开环强B。
闭环强C。
都强D。
都不强1、下列不属于按输入量的变化规律分类的是( ).A.恒值控制系统B。
计算机控制系统C。
随动控制系统 D.程序控制系统1、按照系统传输信号的类型可分成().A.定常系统和时变系统B.离散控制系统和连续控制系统 C.线性系统和非线性系统 D.恒值系统和程序控制系统1.按照控制系统是否设有反馈作用来进行分类,可分为______和______。
答案:开环控制系统闭环控制系统1.对一个自动控制系统的最基本要求是,也即是系统工作的首要条件。
答案:稳定稳定性1.对控制系统性能的基本要求一般可归结为稳定性、___________和___________.答案:快速性准确性1、控制论的中心思想是,通过,和反馈来进行控制。
答案:信息的传递加工处理1.什么是反馈(包括正反馈和负反馈)?根据反馈的有无,可将控制系统如何分类?答案:(1)反馈是指输出量通过适当的检测装置将信号全部或一部分返回输入端,使之与输入量进行比较。
如果反馈信号与系统的输入信号的方向相反,则称为负反馈;如果反馈信号与系统的输入信号的方向相同,则称为正反馈。
(2)根据反馈的有无,可将控制系统分为开环控制系统和闭环控制系统。
1.何为闭环控制系统?其最主要的优点是什么?答案:闭环控制系统就是反馈控制系统,即输出量对控制作用有影响的系统。
其最主要的优点是能实现自我调节,不断修正偏差,抗干扰能力强。
1.简述“自动控制”和“系统”的基本概念.答案:(1)所谓“自动控制”就是在没有人直接参与的情况下,采用控制装置使被控对象的某些物理量在一定精度范围内按照给定的规律变化。
(2)所谓“系统”,即具有某一特定功能的整体。
机械控制工程基础习题集 Prepared on 22 November 2020《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用)。
P2A.反馈作用B.前馈作用C.正向作用D.反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B.干扰输入端C.控制器输出端D.系统输出端3.闭环系统在其控制器和被控对象之间有(反向作用)。
P3A.反馈作用B.前馈作用C.正向作用D.反向作用A.输入量B.输出量C.反馈量D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2-3A.偏差的过程B.输入量的过程C.干扰量的过程D.稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B.稳定系统C.时域系统D.频域系统6.闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A.给定环节B.比较环节C.放大环节D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C.输出量反馈到输入端参与控制D.输出量局部反馈参与控制8.随动系统要求系统的输出信号能跟随(C的变化)。
P6A.反馈信号B.干扰信号C.输入信号D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A.局部反馈B.主反馈C.正反馈D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A.开环控制系统B.闭环控制系统C.反馈控制系统D.非线性控制系统11.自动控制系统的反馈环节中一般具有( B )。
p5A..给定元件B.检测元件 C.放大元件 D.执行元件12. 控制系统的稳态误差反映了系统的〔B 〕p8A. 快速性B.准确性C. 稳定性D.动态性13.输出量对系统的控制作用有直接影响的系统是( B )p3A.开环控制系统B.闭环控制系统C.线性控制系统D.非线性控制系统14.通过动态调节达到稳定后,被控量与期望值一致的控制系统为(无差系统)。
《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用)。
P2A.反馈作用B.前馈作用C.正向作用D.反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B.干扰输入端C.控制器输出端D.系统输出端3.闭环系统在其控制器和被控对象之间有(反向作用)。
P3A.反馈作用B.前馈作用C.正向作用D.反向作用A.输入量B.输出量C.反馈量D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2-3A.偏差的过程B.输入量的过程C.干扰量的过程D.稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B.稳定系统C.时域系统D.频域系统6.闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A.给定环节B.比较环节C.放大环节D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C.输出量反馈到输入端参与控制D.输出量局部反馈参与控制8.随动系统要求系统的输出信号能跟随(C的变化)。
P6A.反馈信号B.干扰信号C.输入信号D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A.局部反馈B.主反馈C.正反馈D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A.开环控制系统B.闭环控制系统C.反馈控制系统D.非线性控制系统11.自动控制系统的反馈环节中一般具有(B )。
p5A..给定元件B.检测元件C.放大元件D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B.准确性C. 稳定性D.动态性13.输出量对系统的控制作用有直接影响的系统是(B )p3A.开环控制系统B.闭环控制系统C.线性控制系统D.非线性控制系统14.通过动态调节达到稳定后,被控量与期望值一致的控制系统为(无差系统)。
祝守新邢英杰韩连英《机械工程控制基础》习题解答机械控制工程基础答案提示第二章系统的数学模型2-1试求如图2-35所示机械系统的作用力F(t)与位移y(t)之间微分方程和传递函数。
F(t)图2-35题2-1图解:依题意:d2ytadytmFtfkytdt2bdtd2ytdytafkytFt故m2dtbdtY传递函数:G2Fmfk2-2对于如图2-36所示系统,试求出作用力F1(t)到位移某2(t)的传递函数。
其中,f为粘性阻尼系数。
F2(t)到位移某1(t)的传递函数又是什么?图2-36题2-2图解:依题意:d2某1td某1td某2t对m1:F1k1某1tfm12dtdtdt对两边拉氏变换:F1k1某1f某1某2m12某1①d2某2td某1td某2t对m2:F2tfk2某2tm2dt2dtdt对两边拉氏变换:F2f某1某2k2某2m22某2②m12fk1某1f某2F1故:2f某1m2fk2某2F2SF1m22fk2fF2某12m12fk1m22fk2f故得:2fF1F2m1fk2某2222mfkmfkf1122故求F1t到某2t的传递函数令:F20某2fG1F1m12fk1m22fk2f2fm1m24fm1m23m1k2m2k12fk1k2k1k2求F2t到某1t的传递函数令:F10某1fG1F2m12fk1m22fk2f22-3试求图2-37所示无源网络传递函数。
fm1m24fm1m23m1k2m2k12fk1k2k1k2o图2-37题2-3图解(a)系统微分方程为i1tdti2tR1Cuii2tR1itR2u0itR2iti1ti2t拉氏变换得I1R1I2CUiI2R1I1R2U0I1R2II1I2R2R1C1U0R2CR11R1R2消去中间变量I1,I2,I得:GR1R2UiR1R2CR11C1R1R2(b)设各支路电流如图所示。
系统微分方程为uitR1i3tu0tR1i3tL11234di2tdtu0ti4tdtC2di5tdtu0tR2i6tu0tL25i2ti3ti4ti5ti6t6由(1)得:UiR1I3Uo由(2)得:R1I3L1I2由(3)得:Uo i4C2由(4)得:UoL2I5由(5)得:UoR2I6由(6)得:I2I3I4I5I6故消去中间变量I1,I2,I3,I4,I5,I6得:L2L1UL1o1L2R1UiL1L2LC2L1L2R1R2L2112L1L2R1R22-4证明Lcot22证明:设ftcot由微分定理有Ld2ft2Ff0f(1)0dt2由于f0co01,f0in00,d2ftdt22cot将式(2)各项带入式(1)中得L2cot2F即2F2F整理得F222-5求f(t)122t的拉氏变换。
《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用).P2A。
反馈作用 B.前馈作用 C.正向作用D。
反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B。
干扰输入端 C.控制器输出端 D.系统输出端3。
闭环系统在其控制器和被控对象之间有(反向作用)。
P3A。
反馈作用B。
前馈作用C。
正向作用 D.反向作用A.输入量B.输出量C。
反馈量 D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2—3A.偏差的过程B。
输入量的过程C。
干扰量的过程D。
稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B。
稳定系统 C.时域系统D。
频域系统6。
闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A。
给定环节B。
比较环节 C.放大环节 D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C。
输出量反馈到输入端参与控制D。
输出量局部反馈参与控制8。
随动系统要求系统的输出信号能跟随(C的变化).P6A.反馈信号B。
干扰信号C。
输入信号 D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A。
局部反馈B。
主反馈C。
正反馈 D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A。
开环控制系统 B.闭环控制系统C。
反馈控制系统 D.非线性控制系统11.自动控制系统的反馈环节中一般具有(B )。
p5A。
.给定元件 B.检测元件C.放大元件D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B。
准确性 C. 稳定性D。
动态性13.输出量对系统的控制作用有直接影响的系统是(B )p3A。
《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用)。
P2A.反馈作用B.前馈作用C.正向作用D.反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B.干扰输入端C.控制器输出端D.系统输出端3.闭环系统在其控制器和被控对象之间有(反向作用)。
P3A.反馈作用B.前馈作用C.正向作用D.反向作用A.输入量B.输出量C.反馈量D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2-3A.偏差的过程B.输入量的过程C.干扰量的过程D.稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B.稳定系统C.时域系统D.频域系统6.闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A.给定环节B.比较环节C.放大环节D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C.输出量反馈到输入端参与控制D.输出量局部反馈参与控制8.随动系统要求系统的输出信号能跟随(C的变化)。
P6A.反馈信号B.干扰信号C.输入信号D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A.局部反馈B.主反馈C.正反馈D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A.开环控制系统B.闭环控制系统C.反馈控制系统D.非线性控制系统11.自动控制系统的反馈环节中一般具有( B )。
p5A..给定元件B.检测元件 C.放大元件 D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B.准确性C. 稳定性D.动态性13.输出量对系统的控制作用有直接影响的系统是( B )p3A.开环控制系统B.闭环控制系统C.线性控制系统D.非线性控制系统14.通过动态调节达到稳定后,被控量与期望值一致的控制系统为(无差系统)。