基于51单片机的多机通信系统
- 格式:pdf
- 大小:2.48 MB
- 文档页数:20
mcs51串行多机通讯的工作原理以mcs51串行多机通讯的工作原理为标题,我们来探讨一下其详细内容。
让我们了解一下什么是mcs51。
MCS-51是英特尔公司(Intel)开发的一款8位单片机系列,它广泛应用于各种嵌入式系统中。
MCS-51具有丰富的外设接口和强大的功能,因此被广泛应用于各种应用领域,包括串行多机通讯。
串行多机通讯是指在多台计算机之间通过串行通讯接口进行数据传输和通信。
在mcs51系列单片机中,串行多机通讯是通过UART (通用异步收发传输器)来实现的。
UART是一种串行通讯接口,它可以将并行数据转换为串行数据进行传输,并将接收到的串行数据转换为并行数据。
在mcs51中,串行多机通讯的工作原理如下:1. 首先,需要配置UART的工作模式。
mcs51系列单片机通常具有多个UART接口,每个接口都有自己的控制寄存器和数据寄存器。
通过配置这些寄存器的值,可以设置UART的工作模式、波特率和其他参数。
2. 在发送数据之前,首先需要将要发送的数据存储在数据寄存器中。
mcs51通过写入数据寄存器来发送数据。
当数据写入数据寄存器后,UART将自动将其转换为串行数据,并通过串行通讯线路发送出去。
3. 接收数据时,mcs51将从串行通讯线路接收到的串行数据存储在数据寄存器中。
通过读取数据寄存器,可以获取接收到的数据。
当数据被读取后,数据寄存器将被清空,以接收下一次接收到的数据。
4. 在串行多机通讯中,需要为每个参与通讯的设备分配唯一的地址。
通过地址,可以确定数据的发送和接收方。
在mcs51中,地址通常通过配置UART的控制寄存器来实现。
通过设置控制寄存器的地址位,可以选择发送或接收特定地址的数据。
5. 数据的传输可以是单向的,也可以是双向的。
对于单向传输,一台设备将数据发送到另一台设备,而另一台设备只负责接收数据。
对于双向传输,两台设备既可以发送数据,也可以接收数据。
在mcs51中,可以通过配置UART的工作模式来选择单向传输还是双向传输。
一、多机通信原理在多机通信中,主机必须要能对各个从机进行识别,在51系列单片机中可以通过SCON 寄存器的SM2位来实现。
当串口以方式2或方式3发送数据时,每一帧信息都是11位,第9位是数据可编程位,通过给TB8置1或置0来区别地址帧和数据帧,当该位为1时,发送地址帧;该位为0时,发送数据帧。
在多机通信过程中,主机先发送某一从机的地址,等待从机的应答,所有的从机接收到地址帧后与本机地址进行比较,若相同,则将SM2置0准备接收数据;若不同,则丢弃当前数据,SM2位不变。
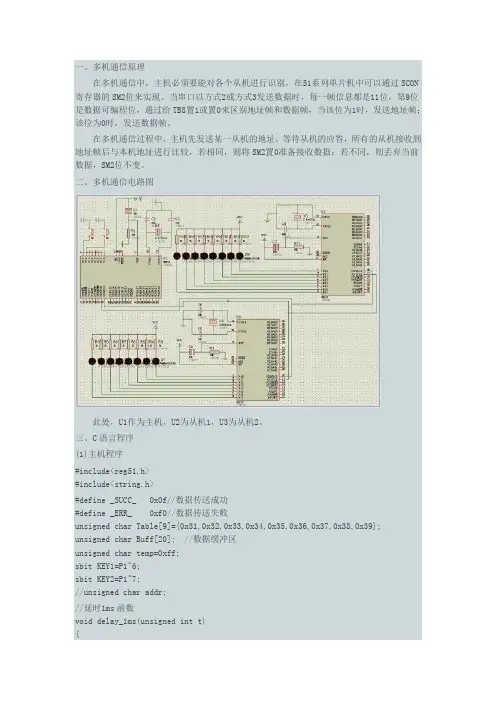
二、多机通信电路图此处,U1作为主机,U2为从机1,U3为从机2。
三、C语言程序(1)主机程序#include<reg51.h>#include<string.h>#define _SUCC_ 0x0f//数据传送成功#define _ERR_ 0xf0//数据传送失败unsigned char Table[9]={0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39}; unsigned char Buff[20]; //数据缓冲区unsigned char temp=0xff;sbit KEY1=P1^6;sbit KEY2=P1^7;//unsigned char addr;//延时1ms函数void delay_1ms(unsigned int t){unsigned int x,y;for(x=t;x>0;x--)for(y=110;y>0;y--);}//缓冲区初始化void Buff_init(){unsigned char i; //将Table里的数据放到缓冲区里for(i=0;i<9;i++){Buff[i]= Table[i];delay_1ms(100);}}//串口初始化函数void serial_init(){TMOD=0x20; //定时器1工作于方式2TH1=0xfd;TL1=0xfd; //波特率为9600PCON=0;SCON=0xd0; //串口工作于方式3TR1=1; //开启定时器TI=0;RI=0;}//发送数据函数void SEND_data(unsigned char *Buff){unsigned char i;unsigned char lenth;unsigned char check;lenth=strlen(Buff); //计算数据长度check=lenth;TI=0; //发送数据长度TB8=0; //发送数据帧SBUF=lenth;while(!TI);TI=0;for(i=0;i<lenth;i++) //发送数据{check=check^Buff[i];TB8=0;SBUF=Buff[i];while(!TI);TI=0;}TB8=0; //发送校验字节SBUF=check;while(!TI);TI=0;}//向指定从机地址发送数据void ADDR_data(unsigned addr){while(temp!=addr) //主机等待从机返回其地址作为应答信号{TI=0; //发送从机地址TB8=1; //发送地址帧SBUF=addr;while(!TI);TI=0;RI=0;while(!RI);temp=SBUF;RI=0;}temp=_ERR_; //主机等待从机数据接收成功信号while(temp!=_SUCC_){SEND_data(Buff);RI=0;while(!RI);temp=SBUF;RI=0;}}void main(){Buff_init();serial_init();while(1){if(KEY1==0){delay_1ms(5);if(KEY1==0){while(!KEY1);ADDR_data(0x01);}}if(KEY2==0){delay_1ms(5);if(KEY2==0){while(!KEY2);ADDR_data(0x02);}}}}(2)从机1程序#include<reg51.h>#include<string.h>#define addr 0x01//从机1的地址#define _SUCC_ 0x0f//数据传送成功#define _ERR_ 0xf0//数据传送失败unsigned char aa=0xff;//主机与从机之间通信标志unsigned char Buff[20];//数据缓冲区//串口初始化函数void serial_init(){TMOD=0x20; //定时器1工作于方式2TH1=0xfd;TL1=0xfd; //波特率为9600PCON=0;SCON=0xd0; //串口工作于方式3TR1=1; //开启定时器TI=0;RI=0;}//接收数据函数unsigned char RECE_data(unsigned char *Buff) {unsigned char i,temp;unsigned char lenth;unsigned char check;RI=0; //接收数据长度while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;lenth=SBUF;RI=0;check=lenth;for(i=0;i<lenth;i++) //接收数据{while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;Buff[i]=SBUF;check=check^(Buff[i]);RI=0;}while(!RI); //接收校验字节if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;temp=SBUF;RI=0;check=temp^check; //将从主机接收到的校验码与自己计算的校验码比对if(check!=0) //校验码不一致,表明数据接收错误,向主机发送错误信号,函数返回0xff {TI=0;TB8=0;SBUF=_ERR_;while(!TI);TI=0;return 0xff;}TI=0; //校验码一致,表明数据接收正确,向主机发送成功信号,函数返回0x00 TB8=0;SBUF=_SUCC_;while(!TI);TI=0;return 0;}void main(){serial_init();while(1){SM2=1; //接收地址帧while(aa!=addr) //从机等待主机请求自己的地址{RI=0;while(!RI);aa=SBUF;RI=0;}TI=0; //一旦被请求,从机返回自己的地址作为应答,等待接收数据 TB8=0;SBUF=addr;while(!TI);TI=0;SM2=0; //接收数据帧aa=0xff; //从机接收数据,并将数据保存到数据缓冲区while(aa==0xff){aa=RECE_data(Buff);}if(aa==0xfe)continue;P1=Buff[1]; //查看接收到的数据}}(3)从机2程序#include<reg51.h>#include<string.h>#define addr 0x02//从机2的地址#define _SUCC_ 0x0f//数据传送成功#define _ERR_ 0xf0//数据传送失败unsigned char aa=0xff;//主机与从机之间通信标志unsigned char Buff[20];//数据缓冲区//串口初始化函数void serial_init(){TMOD=0x20; //定时器1工作于方式2TH1=0xfd;TL1=0xfd; //波特率为9600PCON=0;SCON=0xd0; //串口工作于方式3TR1=1; //开启定时器TI=0;RI=0;}//接收数据函数unsigned char RECE_data(unsigned char *Buff){unsigned char i,temp;unsigned char lenth;unsigned char check;RI=0; //接收数据长度while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;lenth=SBUF;RI=0;check=lenth;for(i=0;i<lenth;i++) //接收数据{while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;Buff[i]=SBUF;check=check^(Buff[i]);RI=0;}while(!RI); //接收校验字节if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;temp=SBUF;RI=0;check=temp^check; //将从主机接收到的校验码与自己计算的校验码比对if(check!=0) //校验码不一致,表明数据接收错误,向主机发送错误信号,函数返回0xff {TI=0;TB8=0;SBUF=_ERR_;while(!TI);TI=0;return 0xff;}TI=0; //校验码一致,表明数据接收正确,向主机发送成功信号,函数返回0x00 TB8=0;SBUF=_SUCC_;while(!TI);TI=0;return 0;}void main(){serial_init();while(1){SM2=1; //接收地址帧while(aa!=addr) //从机等待主机请求自己的地址{RI=0;while(!RI);aa=SBUF;RI=0;}TI=0; //一旦被请求,从机返回自己地址作为应答,等待接收数据TB8=0;SBUF=addr;while(!TI);TI=0;SM2=0; //接收数据帧aa=0xff; //从机接收数据,并将数据保存到数据缓冲区while(aa==0xff){aa=RECE_data(Buff);}if(aa==0xfe)continue;P1=Buff[2]; //查看接收到的数据}}。
51单片机的多机通信原理1. 什么是51单片机的多机通信?51单片机的多机通信是指在多个51单片机之间进行数据传输和通信的过程。
通过多机通信,可以实现不同单片机之间的数据共享和协作,从而实现更加复杂的功能。
2. 多机通信的原理是什么?多机通信的原理是通过串口进行数据传输。
在多个单片机之间,可以通过串口进行数据的发送和接收。
通过定义好的协议,可以实现数据的传输和解析,从而实现多机之间的通信。
3. 多机通信的步骤是什么?多机通信的步骤包括以下几个方面:(1)定义好通信协议:在多机通信之前,需要定义好通信协议,包括数据的格式、传输方式等。
(2)设置串口参数:在单片机中,需要设置好串口的参数,包括波特率、数据位、停止位等。
(3)发送数据:在发送数据之前,需要将数据按照协议进行格式化,然后通过串口发送出去。
(4)接收数据:在接收数据之前,需要设置好串口的中断,然后在中断中接收数据,并按照协议进行解析。
(5)处理数据:在接收到数据之后,需要对数据进行处理,包括数据的存储、显示等。
4. 多机通信的应用场景有哪些?多机通信的应用场景非常广泛,包括以下几个方面:(1)智能家居系统:通过多机通信,可以实现智能家居系统中不同设备之间的数据共享和协作。
(2)工业控制系统:在工业控制系统中,多机通信可以实现不同设备之间的数据传输和控制。
(3)智能交通系统:在智能交通系统中,多机通信可以实现不同设备之间的数据共享和协作,从而实现更加智能化的交通管理。
(4)机器人控制系统:在机器人控制系统中,多机通信可以实现不同机器人之间的数据传输和控制,从而实现更加复杂的任务。
5. 多机通信的优缺点是什么?多机通信的优点包括以下几个方面:(1)实现数据共享和协作:通过多机通信,可以实现不同设备之间的数据共享和协作,从而实现更加复杂的功能。
(2)提高系统的可靠性:通过多机通信,可以实现数据的备份和冗余,从而提高系统的可靠性。
(3)提高系统的扩展性:通过多机通信,可以实现系统的模块化设计,从而提高系统的扩展性。
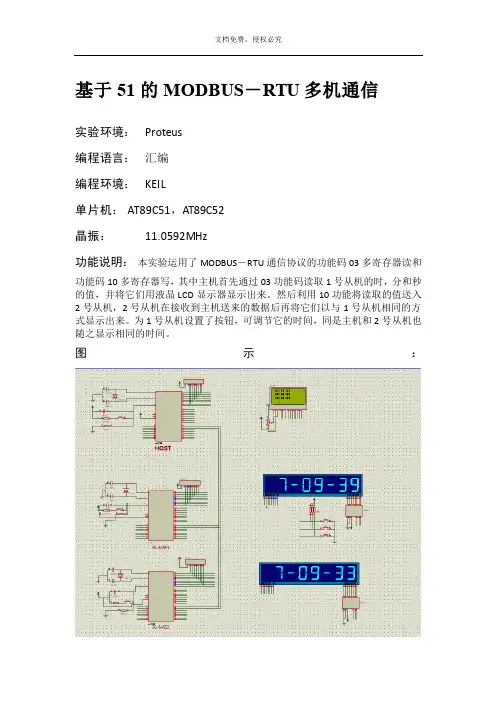
基于51的MODBUS-RTU多机通信实验环境:Proteus编程语言:汇编编程环境:KEIL单片机: AT89C51,AT89C52晶振:11.0592MHz功能说明:本实验运用了MODBUS-RTU通信协议的功能码03多寄存器读和功能码10多寄存器写,其中主机首先通过03功能码读取1号从机的时,分和秒的值,并将它们用液晶LCD显示器显示出来。
然后利用10功能将读取的值送入2号从机,2号从机在接收到主机送来的数据后再将它们以与1号从机相同的方式显示出来。
为1号从机设置了按钮,可调节它的时间,同是主机和2号从机也随之显示相同的时间。
图示:部分程序源代码:1、主机ORG 000HLJMP MAINORG 000BHLJMP TMR0ORG 0023HLJMP USARTORG 0040HMAIN: ACALL INITHERE: CLR RS0CLR RS1JB FLAG2.7,TXWORKJB UFLAG.7,RXWORK;AJMP HERETXWORK: AJMP TXWORK1RXWORK: CLR UFLAG.7;**********接收完成,显示操作JB UFLAG.3,RXWMB03RXWMB10: JNB UFLAG.5,HEREAJMP RXMBW101RXWMB03: CLR UFLAG.3MOV R0,#HOUR1MOV A,CND3CLR CRRC AMOV R7,AMOV R1,#CND5 RWORK1: MOV A,@R1MOV @R0,AINC R1INC R1INC R0DJNZ R7,RWORK1MOV DSPC,#8 TIMDIS: MOV A,DSPCMOV DPTR,#DISTBMOVC A,@A+DPTRMOV LCDD,AACALL LCDWPMOV A,#HOUR1ADD A,DSPCMOV R1,AMOV A,@R1MOV B,#10DIV ABACALL DISPMOV A,BACALL DISPDEC DSPCJNB DSPC.7,TIMDIS CLR RENSETB URDMOV CND1,#0A1H MOV CND2,#10H MOV CND3,#0MOV CND4,#50H MOV CND5,#0MOV CND6,#3MOV CND7,#6MOV CND8,#0MOV CND9,HOUR1 MOV CND10,#0 MOV CND11,MIN1 MOV CND12,#0 MOV CND13,SEC1MOV CND15,#0A5HMOV CNDT,#0MOV CNDT1,#15SETB TB8MOV SBUF,CND1AJMP HERE;******************************** RXMBW101: CLR UFLAG.5MOV CNDT,#0MOV CNDT1,#8AJMP HERE;************************************** TXWORK1:CLR FLAG2.7;1S定时CLR RENSETB URD/* MOV CND1,#30HMOV CND2,#31HMOV CND3,#32HMOV CND4,#33HMOV CND5,#34HMOV CND6,#35HMOV CND8,#37HMOV CND9,#38H*/MOV CND1,#0A0H;地址MOV CND2,#03H ;功能码MOV CND3,#0 ;起始地址2字节MOV CND4,#3BHMOV CND5,#0 ;数据长度MOV CND6,#3MOV CND7,#5AHMOV CND8,#0A5HMOV CNDT,#0MOV CNDT1,#8SETB TB8MOV SBUF,CND1AJMP HERE;*******************************DISTB: DB81H,84H,87H,0C1H,0C4H,0C7H,91H,94H,97H,0D1H,0D4H,0D 7H;*************USART: PUSH PSWPUSH ACCSETB RS0SETB RS1JBC RI,RXINT;发送中断,清中断标志位并转中断处理TXINT: CLR TIINC CNDTMOV A,CNDTCJNE A,CNDT1,TXGN;必须在发送前检测,若在后的话,则最后一个字节可能不能正确传输TXSTP: SETB UFLAG.6;发送结束标志MOV CNDT,#0MOV CNDT1,#8CLR URDSETB RENAJMP UOUT;********************TXGN: MOV A,#CND1ADD A,CNDTMOV R0,ACLR TB8MOV SBUF,@R0UOUT: POP ACCPOP PSWRETI;*************************RXINT: MOV RXDT,SBUFMOV A,CNDTCJNE A,#1,RXINT1MOV A,RXDTCJNE A,#03H,RXMD10MOV CNDT1,#5SETB UFLAG.3;MODBUS03功能AJMP RXSTOR;********************** RXMD10: CJNE A,#10H,RXERORMOV CNDT1,#8SETB UFLAG.5;MODBUS10功能AJMP RXSTOR;********************** RXINT1: JNB UFLAG.3,RXSTORCJNE A,#2,RXSTORMOV A,RXDTADD A,CNDT1MOV CNDT1,ARXSTOR: MOV A,#CND1ADD A,CNDTMOV R0,AMOV @R0,RXDT;CLR RIINC CNDTMOV A,CNDTCJNE A,CNDT1,RXOUTCRCCK: MOV A,@R0 ;发送来的数据变形与否的最简单校验SWAP ADEC R0XRL A,@R0JNZ RXERORSETB UFLAG.7MOV CNDT1,#16MOV CNTM_OV,#200RXEROR: MOV CNDT,#0AJMP UOUTRXOUT: MOV CNTM_OV,#200AJMP UOUT;****************************** DELA Y: MOV R2,#250DELA Y1: DJNZ R2,DELA Y1RET;***************************;**************定时器0中断处理程序TMR0: PUSH PSWPUSH ACCCLR RS1SETB RS0/*MOV A,CNTM_OVJZ TMR01DEC CNTM_OVMOV A,CNTM_OVJNZ TMR01CLR URDSETB REN*/TMR01: DJNZ TM0T1,RETIFMOV TM0T1,#10 ;1msDJNZ TM0TB,RETIFMOV TM0TB,#100DJNZ TM0TS,RETIFMOV TM0TS,#10SETB FLAG2.7;***************** ;中断返回RETIF: CLR RS0POP ACCPOP PSWRETI;***********HD44780读写子程序BUSY: MOV P0,#0FFHCLR LCDRSSETB LCDRWSETB LCDEMOV BIT0,P0CLR LCDEJB BIT0.7,BUSYRETLCDWP: ACALL BUSYCLR LCDRSSJMP LCD1LCDWD: ACALL BUSYSETB LCDRSLCD1: CLR LCDRWSETB LCDEMOV P0,LCDDNOPCLR LCDESETB LCDRSRETLCDW: MOV A,@R0ACALL LCDWDINC R0DJNZ R2,LCDWRET;***************DISP: MOV DPTR,#TIMETBMOVC A,@A+DPTRMOV LCDD,AACALL LCDWDRETTIMETB: DB "0123456789:/abcd" ;****************初始化子程序INIT: MOV SP,#0EFHMOV R1,#TM0TCLR0: MOV @R1,#0INC R1CJNE R1,#FRAM_OV,CLR0LCDINT: MOV LCDD,#38H;LCD初始化子程序ACALL LCDWPMOV LCDD,#01HACALL LCDWPMOV LCDD,#06HACALL LCDWPMOV LCDD,#0CHACALL LCDWPMOV LCDD,#83HACALL LCDWPMOV A,#10ACALL DISPMOV LCDD,#86HACALL LCDWPMOV A,#10ACALL DISPMOV LCDD,#0C3HACALL LCDWPMOV A,#10ACALL DISPMOV LCDD,#0C6HACALL LCDWPMOV A,#10ACALL DISPMOV LCDD,#93HACALL LCDWPMOV A,#10ACALL DISPMOV LCDD,#96HACALL LCDWPMOV A,#10ACALL DISPMOV LCDD,#0D3HACALL LCDWPMOV A,#10ACALL DISPMOV LCDD,#0D6HACALL LCDWPMOV A,#10ACALL DISP;***********************MOV TMOD,#22H;定时器0和1均工作于方式2,定时器1用于串口波特率MOV TH0, #0A3H;11.0592M,100usMOV TL0,#0A3HMOV TM0T,#1MOV TM0T1,#1MOV TM0TB,#5MOV TM0TS,#10;USART初始化MOV TH1,#0FDHMOV TL1,#0FDH; SETB P3.0MOV SCON,#0D0H;串行工作方式3,9为数据传输MOV PCON,#00HSETB URDMOV CNDT,#0MOV CNDT1,#8MOV DSPC,#8MOV UFLAG,#0MOV FLAG2,#0SETB TR0SETB ET0SETB TR1;运行定时器1,但不开中断SETB ES;开串行口中断SETB PSSETB EARET;*************************** END2、1号从机ORG 000HAJMP MAINORG 000BHAJMP TMR0ORG 0023HAJMP USARTORG 0040HMAIN: ACALL INITHERE: CLR RS0CLR RS1JNB UFLAG.7,TIMDC HERE2: CLR UFLAG.7CLR RENSETB URDMOV A,CND6MOV R7,ACLR CRLC AMOV CND3,AADD A,#5MOV CNDT1,AMOV R0,CND4MOV R1,#CND4 MDBS03T:MOV @R1,#0INC R1MOV A,@R0MOV @R1,AINC R0INC R1DJNZ R7,MDBS03TMOV @R1,#5AHINC R1MOV @R1,#0A5HMOV CNDT,#0ACALL DELA YCLR TB8MOV SBUF,CND1TIMDC: JB FLAG2.7,KEYSCAN TIMEDC: MOV A,HOURMOV B,#10DIV ABJNZ TIMH1MOV DIS7,#11AJMP TIMH2;************************ TIMH1: MOV DIS7,ATIMH2: MOV DIS6,B TIMEM: MOV A,MINUTEMOV B,#10DIV ABMOV DIS4,AMOV DIS3,BTIMES: MOV A,SECONDMOV B,#10DIV ABMOV DIS1,AMOV DIS0,BAJMP HERE;*************************KEYSCAN:CLR FLAG2.7MOV A,P1ORL A,#0E0HMOV P1,ANOPNOPMOV A,P1ANL A,#0E0HXRL A,#0E0HJZ NKEYMOV KTEMP,AAJMP HERENKEY: JB KTEMP.KEY0,KSET JB KTEMP.KEY1,KADDJNB KTEMP.KEY2,KOUTAJMP KSUBKSET: JB FLAG2.0,KSET1SETB FLAG2.0AJMP KOUTKSET1: INC FLAG2SETB FLAG2.0JNB FLAG2.2,KOUTMOV FLAG2,#0 KOUT: MOV KTEMP,#0AJMP TIMEDCKADD: JNB FLAG2.0,KOUT MOV R0,#MINUTEJNB FLAG2.1,KADD1MOV R0,#HOURKADD1: INC @R0JB FLAG2.1,HOURACJNE @R0,#60,KOUT KADD2: MOV @R0,#0AJMP KOUTHOURA: CJNE @R0,#24,KOUT AJMP KADD2KSUB: JNB FLAG2.0,KOUTMOV R0,#MINUTEJNB FLAG2.1,KSUB1MOV R0,#HOURKSUB1: DEC @R0MOV A,@R0JNB ACC.7,KOUTJB FLAG2.1,KSUBH0MOV @R0,#59AJMP KOUTKSUBH0: MOV @R0,#23AJMP KOUT;****************定时器0中断处理TMR0: PUSH PSWPUSH ACCSETB RS0CLR RS1DJNZ TM0T,TIMEMOV TM0T,#20T0DIS: MOV P0,#0MOV A,P1ANL A,#0F8HORL A,DSPCMOV P1,AMOV A,#DIS0ADD A,DSPCMOV R0,AMOV A,@R0MOV DPTR,#LEDTBMOVC A,@A+DPTRMOV P0,ADEC DSPCJNB DSPC.7,TIMEMOV DSPC,#7;********************************************** TIME: DJNZ TM0T1,RETIFMOV TM0T1,#10 ;1msDJNZ TM0TB,RETIFMOV TM0TB,#100SETB FLAG2.7DJNZ TM0TS,RETIFMOV TM0TS,#10INC SECONDMOV A,SECONDCJNE A,#60,TIMEHMOV SECOND,#00HINC MINUTEMOV A,MINUTECJNE A,#60,TIMEHMOV MINUTE,#00HINC HOURMOV A,HOURCJNE A,#24,TIMEHMOV HOUR,#00HTIMEH:RETIF: POP ACCPOP PSWRETI;*********************;***********七段共阴数码管LEDTB: DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH,40H,00H ;******************************/*TIMEH1: SETB URDSETB UFLAG.4MOV CND1,#0A0HMOV CND2,#10HMOV CND3,#0MOV CND4,#40HMOV CND5,#0MOV CND6,#3MOV CND7,#6MOV CND8,#0MOV CND9,HOURMOV CND11,MINUTEMOV CND12,0MOV CND13,SECONDMOV CND14,#5AHMOV CND15,#0A5HMOV CNDT,#0MOV CNDT1,#15SETB UFLAG.6CLR UFLAG.5AJMP RETIF;******************/;*************USART: PUSH PSWPUSH ACCSETB RS0SETB RS1JBC RI,RXINT;发送中断,清中断标志位并转中断处理TXINT: CLR TIINC CNDTCJNE A,CNDT1,TXGN;必须在发送前检测,若在后的话,则最后一个字节可能不能正确传输TXSTP: MOV CNDT,#0MOV CNDT1,#8CLR URDSETB RENAJMP UOUT;********************TXGN: MOV A,#CND1ADD A,CNDTMOV R0,ACLR TB8MOV SBUF,@R0UOUT: POP ACCPOP PSWRETIRXAD: MOV A,RXDTCJNE A,#0A0H,RXERORCLR SM2AJMP RXSTORRXINT: MOV RXDT,SBUFJZ RXADCJNE A,#1,RXSTORMOV CNDT1,#8RXSTOR: MOV A,#CND1ADD A,CNDTMOV R0,AMOV @R0,RXDTINC CNDTMOV A,CNDTCJNE A,CNDT1,RXOUTCRCCK: MOV A,@R0 ;接收到的数据变形与否的简单校验SWAP ADEC R0XRL A,@R0JNZ RXERORSETB UFLAG.7MOV CNDT1,#16RXEROR: SETB SM2MOV CNDT,#0RXOUT: AJMP UOUT;***********************DELA Y: MOV R2,#250DELA Y1: DJNZ R2,DELA Y1RET;****************初始化子程序INIT: MOV SP,#5FHMOV R1,#DIS0MOV DSPC,#0CLR URDCLR0: MOV @R1,#0INC R1CJNE R1,#HOUR,CLR0MOV DSPC,#7MOV DIS2,#10MOV DIS5,#10MOV TMOD,#22H;定时器0和1均工作于方式2,定时器1用于串口波特率MOV TH0, #0A3H;11.0592M,100usMOV TL0,#0A3HMOV TM0T,#1MOV TM0T1,#1MOV TM0TB,#5MOV TM0TS,#10;USART初始化MOV TH1,#0FDHMOV TL1,#0FDHMOV SCON,#0F0H;串行工作方式2,9为数据传输MOV PCON,#00HCLR URDMOV CNDT,#0MOV CNDT1,#8MOV UFLAG,#0MOV FLAG2,#0SETB TR0SETB ET0SETB TR1;运行定时器1,但不开中断SETB ES;开串行口中断SETB PSSETB EARET;***************************END3、2号从机ORG 000HLJMP MAINORG 000BHLJMP TMR0ORG 0023HLJMP USARTORG 0040HMAIN: ACALL INITHERE: CLR RS0CLR RS1JB UFLAG.7,HERE2 AHERE: AJMP HEREHERE2: CLR RENCLR UFLAG.7;**********接收完成,显示操作MOV R0,CND4MOV R7,CND6MOV R1,#CND9HERE1: MOV A,@R1MOV @R0,AINC R1INC R1INC R0DJNZ R7,HERE1 TIMEDC: MOV A,HOURMOV B,#10DIV ABJNZ TIMH1MOV DIS7,#11AJMP TIMH2TIMH1: MOV DIS7,A TIMH2: MOV DIS6,B TIMEM: MOV A,MINMOV B,#10DIV ABMOV DIS4,AMOV DIS3,B TIMES: MOV A,SECMOV B,#10DIV ABMOV DIS1,AMOV DIS0,BSETB URD;从机接收指令后回复报文SECHO: MOV CND7,#5AHMOV CNDT,#0MOV CNDT1,#8CLR TB8MOV SBUF,CND1AJMP HERE;*******************************DISTB: DB81H,84H,87H,0C1H,0C4H,0C7H,91H,94H,97H,0D1H,0D4H,0D7H;*************USART: PUSH PSWPUSH ACCSETB RS0SETB RS1JBC RI,RXINT;发送中断,清中断标志位并转中断处理TXINT: CLR TIINC CNDTMOV A,CNDTCJNE A,CNDT1,TXGN;必须在发送前检测,若在后的话,则最后一个字节可能不能正确传输MOV CNDT1,#8CLR URDSETB RENAJMP UOUT;******************** TXGN: MOV A,#CND1ADD A,CNDTMOV R0,ACLR TB8MOV SBUF,@R0 UOUT: POP ACCPOP PSWRETIRXAD: MOV A,RXDTCJNE A,#0A1H,RXERORCLR SM2AJMP RXSTOR RXINT: MOV RXDT,SBUFMOV A,CNDTJZ RXADCJNE A,#1,RXINT1AJMP RXSTORRXINT1: CJNE A,#6,RXSTORMOV A,RXDTADD A,CNDT1MOV CNDT1,ARXSTOR: MOV A,#CND1ADD A,CNDTMOV R0,AMOV @R0,RXDTINC CNDTMOV A,CNDTCJNE A,CNDT1,RXOUTCRCCK: MOV A,@R0 ;接收到的数据变形与否的简单校验SWAP ADEC R0XRL A,@R0JNZ RXERORSETB UFLAG.7MOV CNDT1,#16RXEROR: SETB SM2RXOUT: AJMP UOUT;****************************** DELAY: MOV R2,#250DELAY1: DJNZ R2,DELAY1RET;***************************;**************定时器0中断处理程序TMR0: PUSH PSWPUSH ACCSETB RS0CLR RS1DJNZ TM0T,TIMEMOV TM0T,#20T0DIS: MOV P0,#0MOV A,P1ANL A,#0F8HORL A,DSPCMOV P1,AMOV A,#DIS0ADD A,DSPCMOV R0,AMOV DPTR,#LEDTBMOVC A,@A+DPTRMOV P0,ADEC DSPCJNB DSPC.7,TIMEMOV DSPC,#7;********************************************** TIME: DJNZ TM0T1,RETIFMOV TM0T1,#10 ;1msDJNZ TM0TB,RETIFMOV TM0TB,#100SETB FLAG2.7DJNZ TM0TS,RETIFMOV TM0TS,#10;***************** ;中断返回RETIF: CLR RS0POP ACCPOP PSWRETI;***********七段共阴数码管LEDTB: DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH,40H,00H ;****************初始化子程序INIT: MOV SP,#05FHCLR URDMOV R1,#TM0TCLR0: MOV @R1,#0INC R1CJNE R1,#RXDT,CLR0;***********************MOV TMOD,#22H;定时器0和1均工作于方式2,定时器1用于串口波特率MOV TH0, #0A3H;11.0592M,100usMOV TL0,#0A3HMOV TM0T,#1MOV TM0T1,#1MOV TM0TB,#5MOV TM0TS,#10;USART初始化MOV TH1,#0FDHMOV TL1,#0FDH; SETB P3.0MOV SCON,#0F0H;串行工作方式3,9位数据传输MOV PCON,#00HMOV CNDT,#0MOV CNDT1,#16MOV DSPC,#7MOV DIS2,#10MOV DIS5,#10MOV UFLAG,#0SETB TR0SETB ET0SETB TR1;运行定时器1,但不开中断SETB ES;开串行口中断SETB PSSETB EARET;***************************END。
51 单片机串口多机通信的实现和编程
一、51 单片机的主从模式,首先要设定工作方式3:(主从模式+波特率可变)
SCON 串口功能寄存器:SM0=1;SM1=1(工作方式3)
注:主机和从机都要为工作方式3。
【工作方式2 (SM0 SM1 :1 0):串行口为11 位异步通信接口。
发送或接收
一帧信息包括1 位起始位0、8 位数据位、1 位可编程位、1 位停止位1。
发
送数据:发送前,先根据通信协议由软件设置TB8 为奇偶校验位或数据标识位,然后将要发送的数据写入SBUF,即能启动发送器。
发送过程是由执行任何一条以SBUF 为目的寄存器的指令而启动的,把8 位数据装入SBUF,
同时还把TB8 装到发送移位寄存器的第9 位上,然后从TXD(P3.1)端口输出
一帧数据。
接收数据:先置REN=1,使串行口为允许接收状态,同时还要将RI 清0。
然后再根据SM2 的状态和所接收到的RB8 的状态决定此串行口在
信息到来后是否置R1=1,并申请中断,通知CPU 接收数据。
当SM2=0 时,
不管RB8 为0 还是为1,都置RI=1,此串行口将接收发送来的信息。
当
SM2=1 时,且RB8=1,表示在多机通信情况下,接收的信息为地址帧, 此时
置RI=1,串行口将接收发来的地址。
当SM2=1 时,且RB8=0,表示在多机通
信情况下,接收的信息为数据帧, 但不是发给本从机的,此时RI 不置为1,。
基于51单片机的多机通信系统设计多机通信系统是指通过一台主机与多台从机之间进行数据交互和通信的系统。
在本设计中,我们将使用51单片机实现一个基于串行通信的多机通信系统。
系统硬件设计如下:1.主机:使用一个51单片机作为主机,负责发送数据和接收数据。
2.从机:使用多个51单片机作为从机,每个从机负责接收数据和发送数据给主机。
3.串口:主机和从机之间通过串口进行通信。
我们可以使用RS232标准通信协议。
系统软件设计如下:1.主机设计:a.初始化串口:设置串口参数,如波特率、数据位、停止位等。
b.发送数据:将需要发送的数据存储在发送缓冲区中,通过串口发送给从机。
c.接收数据:接收从机发送的数据,并存储在接收缓冲区中。
2.从机设计:a.初始化串口:设置串口参数,如波特率、数据位、停止位等。
b.接收数据:接收主机发送的数据,并存储在接收缓冲区中。
c.发送数据:将需要发送的数据存储在发送缓冲区中,通过串口发送给主机。
系统工作流程如下:1.主机启动,执行初始化操作,包括初始化串口。
2.从机启动,执行初始化操作,包括初始化串口。
3.主机发送数据给从机:主机将需要发送的数据存储在发送缓冲区中,通过串口发送给从机。
4.从机接收并处理数据:从机接收主机发送的数据,并存储在接收缓冲区中,对接收到的数据进行处理。
5.从机发送数据给主机:从机将需要发送的数据存储在发送缓冲区中,通过串口发送给主机。
6.主机接收并处理数据:主机接收从机发送的数据,并存储在接收缓冲区中,对接收到的数据进行处理。
7.主机和从机循环执行步骤3-6,实现多机之间的数据交互和通信。
多机通信系统的设计考虑到以下几个方面:1.硬件设计:需要合理选择单片机和串口的类型和参数,确保系统的稳定性和可靠性。
2.软件设计:需要设计适应系统需求的通信协议和数据处理提取方法,保证数据的准确性和完整性。
3.通信协议:需要定义主机和从机之间的通信协议,包括数据的格式、传输方式等,以便实现正确的数据交互。
单片机双机通信接口应用在现代电子技术领域,单片机的应用越来越广泛。
单片机之间的通信成为实现复杂系统功能的关键环节之一。
双机通信接口的应用,为各种设备之间的数据交换和协同工作提供了有效的途径。
单片机,简单来说,就是在一块芯片上集成了微处理器、存储器、输入输出接口等功能部件的微型计算机。
它具有体积小、成本低、可靠性高、控制功能强等优点,被广泛应用于工业控制、智能仪表、家用电器、通信设备等众多领域。
双机通信,指的是两个单片机之间进行数据传输和信息交换。
实现双机通信的关键在于通信接口的选择和配置。
常见的双机通信接口方式有串行通信和并行通信。
串行通信是指数据一位一位地按顺序传输。
这种方式只需要少数几根数据线,就能在两个设备之间进行通信,因此硬件成本较低,连线简单。
串行通信又分为同步串行通信和异步串行通信。
异步串行通信相对简单,不需要时钟信号进行同步,通信双方按照约定的波特率和数据格式进行通信。
例如,常见的 UART(通用异步收发器)就是一种异步串行通信接口。
并行通信则是数据的各位同时进行传输。
它的传输速度快,但需要较多的数据线,硬件成本较高,连线也较为复杂。
在实际应用中,并行通信通常用于短距离、高速的数据传输。
在选择双机通信接口时,需要考虑多种因素,如通信距离、数据传输速率、系统复杂度、成本等。
如果通信距离较远,对传输速率要求不高,串行通信是一个较好的选择;如果需要高速传输大量数据,且通信距离较短,并行通信可能更为合适。
以两个基于 51 单片机的系统为例,来探讨一下双机通信的实现。
假设我们要实现一个温度监测系统,一个单片机负责采集温度数据,另一个单片机负责接收并处理这些数据,然后进行显示或控制。
对于串行通信,我们可以使用 UART 接口。
首先,需要对两个单片机的 UART 进行初始化设置,包括波特率、数据位、停止位、校验位等参数。
然后,发送方将温度数据按照约定的格式进行封装,并通过UART 发送出去;接收方则不断监测 UART 接收缓冲区,当有数据到达时,进行读取和解析。
51单片机双机通信原理(一)51单片机双机通信简介•什么是51单片机双机通信•双机通信的作用和应用场景基本原理•单片机串口通信原理–串口通讯协议–数据帧的构成•串口通信的硬件连接–引脚连接方式–串口信号格式设置单向通信实现•主从模式–主机发送数据–从机接收数据•编程实现–主机端程序设计–从机端程序设计双向通信实现•主从模式–主机发送数据–从机接收数据–主机接收数据–从机发送数据•编程实现–主机端程序设计–从机端程序设计通信协议的设计•自定义通信协议–协议的格式–数据的解析与封装高级功能扩展•多机通信实现•数据加密与解密•异常处理与误码纠错总结•51单片机双机通信的基本原理和实现方式•可能遇到的问题及解决方案•双机通信的进一步应用展望简介51单片机双机通信是指使用51系列单片机实现两台或多台单片机之间的数据传输和通信。
双机通信可以实现在多个单片机之间传递数据、完成控制指令的下发、数据的采集和处理等功能。
在各种电子设备和嵌入式系统中,双机通信被广泛应用,可以实现设备之间的互联和协同工作,提高系统的灵活性和智能化水平。
基本原理单片机串口通信原理串口通信是一种将数据通过串行线路进行传输的通信方式。
在51单片机的串口通信中,常用的是UART(通用异步收发传输器)通信协议。
UART通信采用的是异步传输方式,数据按照固定的数据帧格式进行传输。
串口通信的硬件连接在51单片机的串口通信中,需要将主机和从机的UART引脚连接起来。
常用的连接方式是通过一对直线的串行数据线(TXD和RXD)连接主从机,其中TXD是发送数据的引脚,RXD是接收数据的引脚。
为了确保数据的正确传输,还需要进行串口信号格式的设置,包括波特率、数据位数、停止位数和校验位等。
单向通信实现主从模式在单向通信中,主机负责发送数据,从机负责接收数据。
主机通过串口发送数据帧,从机通过串口接收数据帧,并进行相应的处理。
编程实现在主机端程序设计中,需要配置串口通信的参数,并使用串口发送数据的相关函数来发送数据。
51单片机多机通信程序(主机部分) /* multi_m.c *//* 多机通信的主机部分*/#ifndef __MULTI_M_C__#define __MULTI_M_C__#include <AT89X51.H>#include <STRING.H>#define __MAX_LEN_ 64 // 数据最大长度#define _MHZ_ 11 // 设置单片机使用的晶振频率(11.0592MHz) /* 以下为程序协议中使用的握手信号*/#define __SUCC_ 0x0f // 数据传送成功#define __ERR_ 0xf0 // 数据传送错误void init_serial(); // 串口初始化void send_data(unsigned char *buf); // 发送数据void delay10ms(unsigned int count); // 延时子程序(10ms) void main(){char buf[__MAX_LEN_];unsigned char i = 0;unsigned char tmp;unsigned char addr; // 该字节用于保存要通信的从机地址/* 为缓冲区赋初值*/P0 = 0xff;while(P1 != 0) // 每隔100ms从P0口读取,若读取到0则表明数据采集结束{*(buf+i) = P0;delay10ms(10); // 延时100msP0 = 0xff;i++;}*(buf+i) = 0; // 缓冲区最后一个字节为0表示数据结束/* 读要访问的分机地址*/P0 = 0xff;addr = P0;/* 串口初始化*/init_serial(); // 初始化串口EA = 0; // 关闭所有中断/* 发送地址帧并接收应答信息,如果接收的信号与发送的地址信息不同,则重新发送地址帧*/tmp = addr-1;while(tmp != addr){/* 发送从机地址*/TB8 = 1; // 发送地址帧SBUF = addr;while(!TI);TI = 0;/* 接收从机应答*/RI = 0;while(!RI);tmp = SBUF;RI = 0;}/* 发送数据并接收校验信息,如果接收的信号为0FH,表示从机接收成功,否则将重新发送该组数据*/tmp = __ERR_;while(tmp != __SUCC_){send_data(buf); // 发送数据RI = 0;while(!RI);tmp = SBUF;RI = 0;}while(1); // 程序结束,进入死循环}/* 初始化串口*/void init_serial(){TMOD = 0x20; //定时器T1使用工作方式2TH1 = 250; // 设置初值TL1 = 250;TR1 = 1; // 开始计时PCON = 0x80; // SMOD = 1SCON = 0xd0; //工作方式3,9位数据位,波特率9600bps,允许接收}/* 发送数据*/void send_data(unsigned char *buf){unsigned char len; // 保存数据长度unsigned char ecc; // 保存校验字节len = strlen(buf); // 计算要发送数据的长度ecc = len; // 开始进行校验字节计算/* 发送数据长度*/TB8 = 0; // 发送数据帧SBUF = len; // 发送长度while(!TI);TI = 0;/* 发送数据*/for(i=0; i<len; i++){ecc = ecc^(*buf); // 计算校验字节TB8 = 0; // 发送数据帧SBUF = *buf; // 发送数据buf++;while(!TI);TI = 0;}/* 发送校验字节*/TB8 = 0; // 发送数据帧SBUF = ecc; // 发送校验字节while(!TI);TI = 0;}/* 延时10ms,精度较低,参数count为延时时间*/ void delay10ms(unsigned int count){unsigned int i, k;unsigned char j;unsigned int tmp;tmp = (int)((100*_MHZ_)/12);for(i=0; i<count; i++)for(j=0; j<100; j++)for(k=0; k<tmp; k++);}#endif51单片机多机通信程序(从机部分)/* multi_s.c *//* 多机通信的从机部分*/#ifndef __MULTI_S_C__#define __MULTI_S_C__#include <AT89X51.H>#include <STRING.H>#define __MAX_LEN_ 64 // 数据最大长度#define _MHZ_ 11 // 设置单片机使用的晶振频率(11.0592MHz)/* 以下为程序协议中使用的握手信号*/#define __SUCC_ 0x0f // 数据传送成功#define __ERR_ 0xf0 // 数据传送错误void init_serial(); // 串口初始化unsigned char recv_data(unsigned char *buf); // 接收数据void Beep_ok(); // 蜂鸣表示数据接收ok,该函数代码未给出void main() {char buf[__MAX_LEN_];unsigned char i = 0;unsigned char tmp = 0xff;unsigned char addr; // 保存本机地址/* 从P1口读取本机地址*/P1 = 0xff;addr = P1;/* 串口初始化*/init_serial(); // 初始化串口EA = 0; // 关闭所有中断/* 进入设备应答阶段*/while(1){SM2 = 1; // 只接收地址帧/* 如果接收到的地址帧不是本机地址,则继续等待*/ tmp = addr-1;while(tmp != addr){RI = 0;while(!RI);tmp = SBUF;RI = 0;}/* 发送应答信号,并做好接收数据的准备*/TI = 0;TB8 = 0; // 主机不检测该位SBUF = addr;while(!TI);TI = 0;SM2 = 0; // 允许接收数据信息/* 数据接收*/tmp = 0xff;while(tmp == 0xff) // 如果数据校验失败则重新接收数据{tmp = recv_data(buf); // 校验失败返回0xff,检测到地址帧则返回0xfe,接收成功则返回0}if(tmp == 0xfe) // 在数据接收过程中,如果发现地址帧,则重新开始整个接收过程continue;Beep_ok(); // 蜂鸣表示数据接收成功}}/* 初始化串口*/void init_serial(){TMOD = 0x20; //定时器T1使用工作方式2TH1 = 250; // 设置初值TL1 = 250;TR1 = 1; // 开始计时PCON = 0x80; // SMOD = 1SCON = 0xd0; //工作方式3,9位数据位,波特率9600bps,允许接收}/* 接收数据,注意该函数使用buf指向的缓冲区保存数据,在数据末尾使用’\0’表示数据结束* 返回值为0,数据校验成功,返回值为0xfe,接受过程中接收到地址帧,返回值为0xff,数据校验失败*/unsigned char recv_data(unsigned char *buf){unsigned char len; // 该字节用于保存数据长度unsigned char ecc; // 该字节用于保存校验字节unsigned char i,tmp;/* 接收数据长度*/RI = 0;while(!RI);if(RB8 == 1) // 若当前接收为地址帧则返回0xfereturn 0xfe;len = SBUF;RI = 0;/* 使用len的值为校验字节ecc赋初值*/ecc = len;/* 接收数据*/for(i=0; i<len; i++){while(!RI);if(RB8 == 1) // 若当前接收为地址帧则返回0xfe return 0xfe; *buf = SBUF; // 接收数据ecc = ecc^(*buf); // 进行字节校验RI = 0;buf++;}*buf = 0; // 表示数据结束/* 接收校验字节*/while(!RI);if(RB8 == 1) // 若当前接收为地址帧则返回0xfe return 0xfe; tmp = SBUF;RI = 0;/* 进行数据校验*/ecc = tmp^ecc;if(ecc != 0) // 校验失败{*(buf-len) = 0; // 清空数据缓冲区TI = 0; // 发送校验失败信号TB8 = 0;SBUF = __ERR_;while(!TI);TI = 0;return 0xff; // 返回0xff表示校验错误} TI = 0; // 校验成功TB8 = 0;SBUF = __SUCC_;while(!TI);TI = 0;return 0; // 校验成功,返回0}#endif。
51单片机的串口双机通讯一、什么是串口串口是串行发送数据的接口,是相对于并口来说的,是一个广泛的定义。
本期我们说的串口指的是指UART或是RS232。
二、什么是波特率波特率是指串行端口每秒内可以传输的波特位数。
这里所指的波特率,如标准9600不是每秒种可以传送9600个字节,而是指每秒可以传送9600个二进位。
一个字节需要8个二进位,如用串口模式1来传输,那么加上起始位和停止位,每个数据字节就要占用10个二进位。
9600bps用模式1传输时,每秒传输的字节数是9600÷10=960个字节,发送一个字节大概需要1ms时间。
三、51单片机串口相关寄存器1、SCON串口控制寄存器(1)SM0和SM1:方式选择寄存器SM0 SM1 工作方式功能波特率0 0 方式0 8位同步移位寄存器晶振频率/ 120 1 方式1 10位UART 可变1 0 方式2 11位UART 晶振频率/32或晶振频率/64 1 1 方式3 11位UART 可变多机通信是工作在方式2和方式3的,所以SM2主要用于方式2和方式3,多级通信时,SM2=1,当SM2=1时,只有当接收到的数据帧第9位(RB8)为1时,单片机才把前八位数据放入自己的SBUF中,否则,将丢弃数据帧。
当SM2=0时,不论RB8的值是什么,都会把串口收到的数据放到SBUF中。
(3)REN:允许接收位REN用于控制是否允许接收数据,REN=1时,允许接收数据,REN=0时,拒绝接收数据。
(4)TB8:要发送的第9位数据位在方式2和方式3中,TB8是要作为数据帧第9位被发送出去的,在多机通信中,可用于判断当前数据帧的数据是地址还是数据,TB8=0为数据,TB8=1为地址。
(5)RB8:接收到的第9位数据位当单片机已经接收一帧数据帧时,会把数据帧中的第9位放到RB8中。
方式0不使用RB8,在方式2和方式3中,RB8为接收到的数据帧的第9位数据位。
(6)TI:发送中断标志位方式0中,不用管他。
51单片机多机通信过程51单片机具有多机通信的功能,可实现一台主机于多台从机的通信。
多机通信充分利用了单片机内部的多机通信控制位SM2。
当从机SM2,1时,从机只接收主机发出的地址帧(第九位为1),对数据帧(第九位为0)不予理睬;而当SM2=0时,可接收主机发送过来的所有信息。
多机通信的过程如下:(1)所有从机SM2均置1,处于只接收地址帧状态。
(2)主机先发送一个地址帧,其中前8位数据表示地址,第9位为1表示该帧为地址帧。
(3)所有从机接收到地址帧后,进行中断处理,把接收到的地址与自身地址相比较。
地址相符时将SM2清成0,脱离多机状态,地址不相符的从机不作任何处理,即保持SM2,1。
(4)地址相符的从机SM2=0,可以接收到主机随后发来的信息,即主机发送的所有信息。
收到信息TB8=0,则表示是数据帧,而对于地址不符的从机SM2=1,收到信息TB8=0,则不予理睬,这样就实现了主机与地址相符的从机之间的双机通信。
(5)被寻址的从机通信结束后置SM2=1,恢复多机通信系统原有的状态。
主机:设置为SM2=0。
这是双机通信的形式,可以任意的发送和接收发送:以TB8=1发送,将发送到所有SM2=1的分机。
这是呼叫某个从机。
以TB8=0发送,将发送到SM2=0的分机。
这是双机通信的形式。
------从机:先设置为SM2=1。
这是多机通信的形式,只能收到RB8=1的。
接收:仅能收到RB8=1的数据,确认是呼叫本机时,令SM2=0。
设置为SM2=0后,是双机通信的形式。
追问那从机的RB8要怎么设,是需要软件设置还是单片机自己识别,在编程的时候要怎么写, 回答从机的RB8,不需要编程。
从机的RB8,是接收到的,它是主机发送出来的TB8。
想要对TB8进行控制,需要在主机中编程。
单片机多机通讯说明:该程序为多机通讯程序,最多可以挂255个从机。
该程序主机发送端与多个从机的接收端相接,主机的接收端与多个从机的发送端相接。
51单片机与PC机通信随着嵌入式系统和物联网技术的发展,51单片机在许多应用中扮演着重要的角色。
这些单片机具有低功耗、高性能和易于编程等优点,使其在各种嵌入式设备中得到广泛应用。
在这些应用中,与PC机的通信是一个关键的需求。
本文将探讨51单片机与PC机通信的方法和协议。
串口通信是51单片机与PC机进行通信的最常用方式之一。
串口通信使用一个或多个串行数据线来传输数据,通常使用RS232或TTL电平标准。
在硬件连接方面,需要将51单片机的串口与PC机的串口进行连接。
通常使用DB9或USB转TTL电路来实现这一连接。
在软件编程方面,需要使用51单片机的UART控制器来进行数据的发送和接收。
具体实现可以使用Keil C51或IAR Embedded Workbench 等集成开发环境进行编程。
USB通信是一种比较新的通信方式,它具有传输速度快、支持热插拔等优点。
在51单片机中,可以使用USB接口芯片来实现与PC机的通信。
在硬件连接方面,需要将51单片机的USB接口芯片与PC机的USB接口进行连接。
通常使用CH340G或FT232等USB转串口芯片来实现这一连接。
在软件编程方面,需要使用51单片机的USB接口芯片来进行数据的发送和接收。
具体实现可以使用相应的USB库来进行编程。
网络通信是一种更加灵活和高效的通信方式。
在51单片机中,可以使用以太网控制器来实现与PC机的网络通信。
在硬件连接方面,需要将51单片机的以太网控制器与PC机的网络接口进行连接。
通常使用ENC28J60等以太网控制器来实现这一连接。
在软件编程方面,需要使用51单片机的以太网控制器来进行数据的发送和接收。
具体实现可以使用相应的网络库来进行编程。
需要注意的是,网络编程涉及到更多的协议和数据格式,需要有一定的网络基础知识。
本文介绍了51单片机与PC机通信的三种常用方式:串口通信、USB 通信和网络通信。
每种方式都有其各自的优缺点和适用场景。