2024多波束系统介绍
- 格式:ppt
- 大小:32.71 MB
- 文档页数:43
RTK在R2Sonic 2024多波束系统中应用探讨摘要:本文详细分析了水域测量所用GPS差分改正信号的种类及精度,分解了R2Sonic 2024多波束系统测量过程中定位信号处理过程,探讨了RTK在多波束测量中应用的可行性。
关键词:RTK 多波束系统GPS差分改正1前言目前在水域测量的定位设备中,选择信标较多,选择RTK较少。
信标一般可选择Beacon、SBAS、StarFire等系统的GPS差分定位信号,测量过程中一般需要验潮。
在近海或者内陆的水域测量中,单波束已经实现了无验潮模式的RTK测量,测量精度和效率大幅提高。
在多波束系统中,GPS差分信号一般选择Beacon或SBAS,较少选择有偿使用的StarFire。
本文以R2Sonic 2024多波束系统为例,分解多波束测量过程中差分信号处理过程,探讨了常规RTK应用于多波束的可行性。
2水域测量三种典型GPS差分信号分析Beacon海岸信标站台网,在我国是由交通部设立在我国沿海的20个站台组成。
信标站台以约300kHz的频率播发RTCM格式的GPS 差分信号,信号覆盖海岸线约100km,沿海用户可根据该信号计算位置坐标。
由于信标站台自身差分改正信号精度有限,台站间距离从几十公里至几百公里不等,故用户所能得到的平面定位精度非常有限,从1m~5m不等,观测过程中需验潮。
Beacon海岸信标站台网播发的广域差分定位信号免费,目前国内95%海洋测量用户使用该信号。
SBAS即Satellite Based Augmentation Systems,是利用地球静止轨道卫星建立的地区性广域差分增强系统。
目前全球发展的SBAS系统有:欧空局接收卫星导航系统(EGNOS),覆盖欧洲大陆;美国的DGPS(Differential GPS),美国雷声公司的广域增强系统(W AAS),覆盖美洲大陆;日本的多功能卫星增强系统(MSAS),覆盖亚洲大陆;等等。
SBAS通过地球静止卫星(GEO)发布包括GPS卫星星历误差改正、卫星钟差改正和电离层改的信息,通过GEO卫星发播GPS和GEO卫星完整的数据,通过GEO卫星的导航载荷发射GPS L1测距信号。
- 108 -工 程 技 术在采用多波束系统对深海探测领域进行研究的过程中发现,多波束探测技术是目前一种新型水下地形探测方法。
随着现阶段高新科研领域内高端计算机、数字化定位和高精度传感器等辅助性手段的参与及支持,这项探测技术在市场内的应用开始逐步深化,并在科研工作的持续推进下取得了显著的成绩[1]。
与常规的单波束声纳探测技术相比,多波束系统能实现大范围、全覆盖和高精度测量[2]。
1 多波束系统的构成与测量为保证水下探测项目的顺利实施,应在应用前,对多波束系统的构成、测量与设备安装标定进行分析,在此过程中要明确,一个完整可用的多波束系统主要由3个部分构成,分别为操作站、处理单元和探头,除此之外,为发挥系统在水下更高的作用与价值,还需要集成并安装系统动力传感器、定位装置、声速传感器、后处理程序和终端等[3]。
具体构成如图1所示。
在此过程中应明确,该系统与单波束测深装置的工作原理相同,均采用超声探测原理[4]。
探测装置是通过电声传感器向水下发出一道声波,再从水下接收一道回波,通过测量从水下发出声波到接收声波时间的方式计算水下深度[5]。
多波束系统的信号收发部分由两套方向性正交的探头构成,探头相互独立地进行收发,用这种方式,得到一条具有竖直方向的窄波束。
如图2所示。
2 水下探测项目实例以海域工程项目为例,根据工程需要,对该区域的海域进行水下多波束探测扫测。
经过现场勘测,扫测区域的面积约为200km ²。
由于该区域的地形较为复杂,海域的沙波较多且呈锯齿状,因此总体分析该海域受区域内沙波地貌分布的影响,区域地形起伏较为频繁且剧烈,相邻沙波波峰间形成沟壑状地形,如图3所示。
通过处理分析得到的数据成果能更直观地掌握海域地形沙波分布、大小和具体位置,便于为该海域工程建设和设计提供更精确的数据,研究决定使用多波束系统,对此区域进行水下探测[6]。
此次研究的海域潮汐引用理论深度基准面,该海域属于不规则全日潮,其余海域均为不规则半日潮。
Sonic 2024多波束水下地形扫测应用实例作者:李玉海陈兰伟韩明钦来源:《科技创新与应用》2015年第14期摘要:文章主要介绍了多波束系统的仪器性能指标、多波束系统的安装与校准和后处理的流程,并通过实例叙述了Sonic 2024多波束系统在水下地形扫测中的应用,有效地说明了多波束测量在水下地形测量中的优势。
关键词:Sonic 2024;多波束;水下地形扫测1 概述多波束测深系统将传统的测深技术从原来的点、线扩展到面,能够对所测水域进行全覆盖、高精度测量[1,2,3]。
Sonic 2024多波束测深系统是目前市场上主流的测深设备,较其他类型多波束优势在于超高分辨率和准确度,且波束具有导向性[5]。
文章结合实际工作中航道扫测的项目,详述了多波束系统中各传感器的性能指标、多波束系统的安装与校准以及多波束数据后处理的基本流程,最后通过CARIS HIPS生成水下地形的三维图像。
2 主要仪器性能指标2.1 多波束测深仪Sonic 2024是美国R2Sonic公司生产的基于第五代声呐结构的高精度多波束测深仪。
工作频率为200-400kHz(可调),波束宽度为1°×0.5°@400kHz,波束数目为256个,扇形条带开角为10°-160°,测深最大量程为500m,脉冲宽度为17μS-500μS,功率为191-2211dB,测深分辨率为1.25cm。
2.2 光纤罗经及姿态传感器设备法国iXSEA公司生产的OCTANS光纤罗经和运动传感器是世界上唯一经IMO认证的测量级罗经。
它内置有自适应升沉预测滤波器,在任何情况下,均能实时提供精确可靠的运动姿态数据。
OCTANS航向稳定时间小于5min,航向精度为0.1°×Secant纬度,Roll/Pitch动态精度为0.01°,Heave精度为5cm或5%。
2.3 定位设备Trimble SPS361型信标机是世界GPS知名公司Trimble的高精度的定位设备,支持接收MSK信标差分信号,可提供亚米级定位精度,广泛应用于海洋测量、港口工程等各个领域,水平定位精度优于1米。
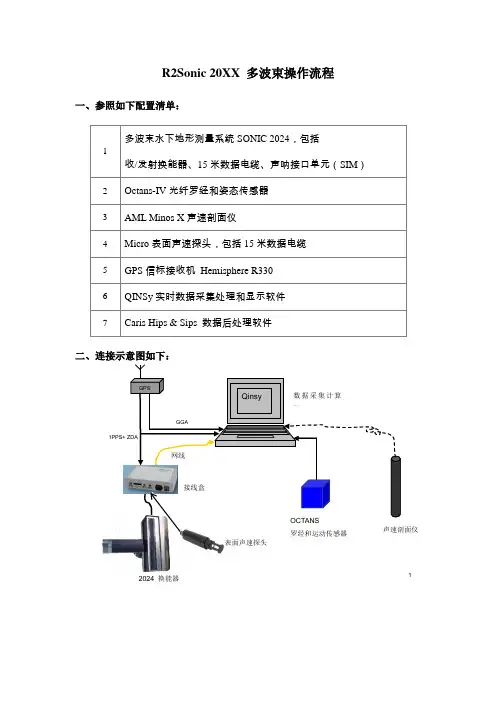
R2Sonic 20XX 多波束操作流程一、参照如下配置清单:1多波束水下地形测量系统SONIC 2024,包括收/发射换能器、15米数据电缆、声呐接口单元(SIM )2 Octans-IV 光纤罗经和姿态传感器3 AML Minos X 声速剖面仪4 Micro 表面声速探头,包括15米数据电缆5 GPS 信标接收机 Hemisphere R330 6QINSy 实时数据采集处理和显示软件 7Caris Hips & Sips 数据后处理软件二、连接示意图如下:1OCTANS 罗经和运动传感器接线盒网线GGA声速剖面仪GPSQinsy1PPS+ ZDA数据采集计算机表面声速探头2024 换能器三、操作流程1.前期准备了解测区概况,包括测区的水文、潮汐和地质情况,测区中央子午线、投影及坐标转换参数等内容。
2. 设备安装如上图所示,将多波束和表面声速探头安装到导流罩上,并通过安装杆固定到船上,要保证船在航行的过程中,多波束安装杆不能抖动,否则无法保证数据的准确性。
3. 系统接线安装GPS及光纤罗经Octans,按照连接示意图,完成多波束及辅助设备的连接。
4. 系统供电PC开机,GPS、Octans和SIM(多波束声纳接口单元)通电。
5. 声速剖面测量测量船开到测区,停船。
参照说明书《MinosX用户使用手册》,测量声速剖面。
6. 运行R2Sonic.exe多波束控制软件,参照说明书《Sonic 2024 使用指南》。
如果SIM盒上没有外接表面声速探头,则在Settings->Ocean settings…,勾选Sound velocity,输入探头所在深度的声速值,SVP的指示灯显示为黄色。
如果SIM盒上没有外接姿态数据(TSS1格式,100hz),且Settings->Sensor settings…,Motion的Interface选择Off,那么,MRU显示为灰色。
一定要保证GPS、PPS的指示灯为绿色,时间显示为格林威治时间,否则,表明时间没有同步,不能进行下一步操作。

多波束探测系统在护岸施工中测量检测的应用◎ 吴兴华 中国铁建国际集团有限公司摘 要:本文分析多波束探测系统的工作原理,结合工程实例介绍了多波束探测系统在海底深水铺检测、抛石工程和护岸施工中的应用和数据采集、数据处理和水深测量成果图方面的优势,提高工作效率,可为类似工程提供参考。
关键词:多波束探测系统;多波束工作原理;护岸;测量检测1.引言多波束探测系统的发展,为航海事业带来了有利条件,而且也对高精度测量的发展带来了一定挑战。
采用多波束探测系统对海底进行水深测量,水深数据是分析海底地形变化的基本信息。
通过数据处理,以图形的方式可以直观的看到海底地形情况。
2.多波束测探系统在护岸中的发展现状2.1研究现状目前,随着社会的发展步伐加快,护岸、防波堤等水工建筑也逐步由近海到远海、远离陆域方向发展,深水潜堤也相应的向“深、险、难”方向靠拢。
对此,多波束测探系统的应用能够解决水下测量的问题,现被海洋测量人员广泛应用。
其中,多波束测深系统具有测量区域大、测量效率高、误差小等优势,和单波束测量比较,多波束测深系统具有从点到线扩展到面的特点,通过对测量数据的处理可以得到海底地形三维图形,对于护岸施工过程中测量动态检测起到重要作用。
同时可以及时发现不合格点,提高测量精度。
通过对林查班三期一标水工项目护岸工程水下隐蔽建筑物测量检测深入研究,多组合、多试验、多比较、多总结,试验与现场实际施工相结合,采集数据,整理分析,得出相关结论。
2.2研究内容本文研究内容是对多波束探测系统在护岸施工过程中测量检测应用,依托林查班三期一标水工项目护岸工程就多波束测深系统在护岸施工过程中测量检测,减少验收时间,精确提供水下地形变化,减少堤身断面不必要的石料用量,及时发现不合格点,提高测量精度,保证施工质量,提高施工效率,指导精准施工。
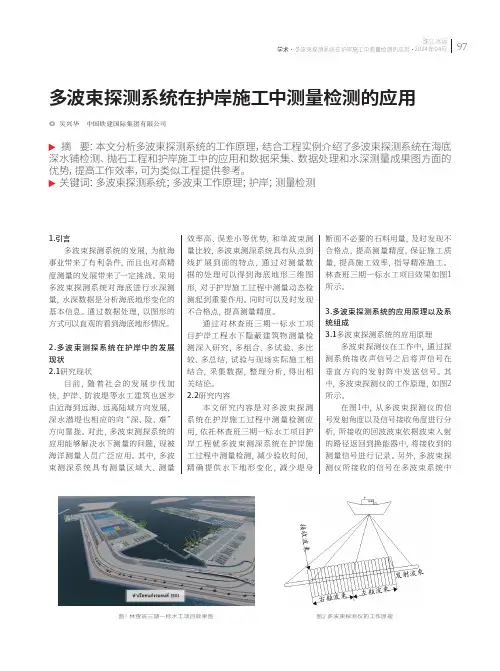
林查班三期一标水工项目效果如图1所示。
3.多波束探测系统的应用原理以及系统组成3.1多波束探测系统的应用原理多波束探测仪在工作中,通过探测系统接收声信号之后将声信号在垂直方向的发射阵中发送信号。
利用Sonic2024多波束数据计算疏浚土方量摘要:本文主要介绍了常用的土方量计算方法、多波束数据处理,并通过同一区域不同时间测量的多波束数据计算疏浚的土方量,说明利用离散的水深数据和Cass软件可以有效统计疏浚的土方量。
关键词:Sonic 2024;多波束;疏浚土方量1、引言近些年,随着国家对海洋开发的重视和相应海洋政策的出台,沿海地区加强了对港口的开发进度,对海底地形数据的需求日益增长。
多波束测深系统具有全覆盖、高精度和高效率的特点,越来越多地应用于泊位以及港口维护疏浚工程中,尤其在疏浚工程水下土方量的计算方面, 通过水深测量获得的数据是疏浚土方量计算最最基本的原始数据。
本文结合航道疏浚的实际工作,详述了常用的土方量计算方法、多波束水深数据的处理,并结合航道疏浚前后的水深数据利用CASS软件中的数字地面模型(DTM)法计算疏浚的方量,最后通过CARIS HIPS生成疏浚前后水下地形的三维图像,直观地了解了疏浚前后的情况,验证了利用离散的水深数据和CASS软件计算疏浚方量的可行性。
2、土方量计算方法疏浚土方量计算是航道疏浚工程的一个重要组成部分,是工程预算和工期的重要参考因素,直接关系到工程造价,建设方和设计单位一般都会将疏浚土方量的计算作为衡量工程进度和工程效益的重要指标因素,因此,作为疏浚土方量计算最原始数据的水深测量数据,在水下疏浚土方量计算方面显得极其重要。
由于航道疏浚后的不可复原性和疏浚土方量的统计存在误差,容易在甲方和疏浚方之间产生经济纠纷,因此选用合理的疏浚土方量计算方法将疏浚土方量的计算误差降到最低,是工程技术人员需要认真研究探讨的问题[5]。
疏浚土方量的计算是个复杂的问题,会受到水下地形坡度、水下地形的复杂性、海底底质条件、水深数据误差和计算方法等因素的影响。
目前疏浚土方量计算的基本方法有方格网法、断面法、等深线法以及数字地面模型(DTM)法。
方格网法是疏浚土方量计算最基本的方法之一。
现代电子技术Modern Electronics TechniqueJan. 2024Vol. 47 No. 22024年1月15日第47卷第2期如今,5G 已经结束了标准的冻结时代,逐渐进入到商业化阶段,它不但在技术上为大型多投入多产出和毫米波系统的实际部署奠定了基础,还对5G 技术应用于远程医疗和虚拟现实等业务起到了推动作用。
在飞速DOI :10.16652/j.issn.1004‐373x.2024.02.003引用格式:冯宇,许超,李威,等.基于5G 新空口的感知通信一体化多波束系统[J].现代电子技术,2024,47(2):11‐15.基于5G 新空口的感知通信一体化多波束系统冯 宇1,2, 许 超2, 李 威2, 李 曦2, 刘 翀2(1.华中科技大学, 湖北 武汉 430074; 2.国网辽宁省电力有限公司信息通信分公司, 辽宁 沈阳 110006)摘 要: 由于多波束通信信道中的重要信号会受到传播距离的影响,存在串行干扰和噪声,致使天线方向图与实际数值不一致。
针对该问题,设计一种基于5G 新空口的感知通信一体化多波束系统。
通过5G 新空口多波束基站、多波束基站天线自动对准平台以及多波束采集控制平台三部分,设计感知通信一体化多波束系统硬件结构;并在系统硬件结构基础上设计系统软件部分,采用多波束形成方法设计5G 新空口多波束赋形接收和发射子系统,获取天线方向图。
在子系统内,通过5G 新空口混合时空编码,采用QR 分解构建多波束分解信道矩阵,消除编码过程中存在的串行干扰;根据信道分解结果,采用基于通道映射的方法提取多波束通信信道中的重要信号。
通过系统硬件和软件设计构建基于5G 新空口的感知通信一体化多波束系统。
系统测试结果表明,所设计系统多波束成形是向中心点聚拢的,天线方向最大值为0,与理想图完全重合,能够实现多波束稳定传输。
关键词: 多波束系统; 5G 新空口; 感知通信一体化技术; 多波束基站; 天线自动对准平台; 天线方向图中图分类号: TN929.5‐34 文献标识码: A 文章编号: 1004‐373X (2024)02‐0011‐05Sensing and communication integrated multibeam system based on 5G new radioFENG Yu 1, 2, XU Chao 2, LI Wei 2, LI Xi 2, LIU Chong 2(1. Huazhong University of Science and Technology, Wuhan 430074, China;2. Information and Communication Branch, State Grid Liaoning Electric Power Co., Ltd., Shenyang 110006, China)Abstract : Due to the influence of propagation distance on important signals in multibeam communication channels, there is serial interference and noise, resulting in inconsistent antenna patterns with actual values. Therefore, a perception communication integrated multibeam system based on 5G new radio is designed. The hardware structure of the sensing communication integrated multibeam system is designed by means of 5G new radio multibeam base station, multibeam base station antenna automaticalignment platform, and multibeam acquisition and control platform. On the basis of the system hardware structure, the system software part is designed, multibeam forming method is used to design the 5G new radio multibeam shaping receiving and transmitting subsystem, so as to obtain the antenna pattern. In the subsystem, a hybrid spatiotemporal encoding is implementedusing 5G new radio, and the QR decomposition is used to construct the multibeam decomposition channel matrix, so as to eliminate the serial interference in the coding process. According to the channel decomposition results, the channel mapping based method is used to extract the important signals in the multibeam communication channel. The sensing and communicationintegrated multibeam system based on the 5G new radio is constructed by means of the system hardware and software. The system testing results show that the multibeam forming of the designed system is converging towards the center point, with a maximum antenna direction of 0 dB, which completely coincides with the ideal image and can achieve stable multibeam transmission.Keywords : multibeam system; 5G new radio; sensing and communication intergated technology; multibeam base station;antenna automatic alignment platform; antenna pattern收稿日期:2023‐04‐25 修回日期:2023‐05‐31基金项目:湖北省自然科学基金项目(2020CFB377);国家电网有限公司科技项目:提高技术创新能力及群众性创新课题研究(2021YF‐86);国网辽宁电力科技项目(2020YF‐7)11现代电子技术2024年第47卷变化的通信需求和服务形式面前,无线通信技术也需要持续发展才能赶上时代的脚步。
多波束测深系统在水利工程中的应用文章介绍了多波束测深系统工作原理,以及在水利工程建设及后期运行中的应用,探讨影响其测量精度的主要因素及改善措施,展望其未来发展。
标签:多波束测深;水利工程;水下地形测量1、多波束测深系统组成及工作原理多波束测深系统是一个比较复杂的组合设备,系统本身由发射接收换能器、信号控制处理器、运动传感器等组成,还需配备罗盘,姿态仪,定位GPS,数据采集和存储计算机,并且一般需要安装在导航船上工作。
多波束测深系统的工作原理和单波束回声测深仪基本相同,即测量每个波束声波信号的旅行时间和反射角度,结合定位数据、测量船的姿态数据、声速数据来计算每个波束测得的水深。
2、多波束测深系统在水利建设中的应用分析、了解、评价和解决水利工程建设对河流的影响,从而实现水利工程与河流流域的协调发展,促进社会可持续发展。
水下地形测深系统是了解、掌握河流水下地形变化,解决水利工程修建带来的不利影响的有效工具之一。
目前,利用多波束测深系统测量水下地形已成为普遍采用的重要手段,国内外运用多波束测深系统进行水下地形的测量的原理和方法均已成熟。
2.1 水库淤积及冲刷测量我国的大江大河大多泥沙含量较大,在河流上修建水库,导致河流水位提升,流速降低,必然造成泥沙淤积,而在水库下游,由于发电尾水及汛期泄洪的冲刷,对河床及河底都会造成一定程度的改变,威胁着水库的运行安全和效率。
利用多波束测深系统,监测水下地形的变化,可为水库上游的清淤工程及水库下游的河床保护提供更为准确的数据信息,节省成本,提高工作效率。
2.2 航道水下地形测量航运作为交通运输的重要途径之一,随着水利工程的修建,极大地改变了河道原有的水位变化,包括水流形态,冲淤方式改变等,水库上游水位上升,原有急流险滩可随着水位抬高而被淹没,航道水深增加,航道等级提高,而下游水量减少,水流形势发生较大改变,下游的航运能力降低,从而对整个河段的航运造成一定程度的改变。
这些变化极大地增加了航道运行的安全隐患,及时,准确的掌握这些变化,并作对应的调整可有效降低安全风险,利用多波束测深系统可以准确清晰的了解、掌握水下地形,对水深,水下暗礁,浅滩等影响航运的因素准确掌握,提高航运安全。
国产多波束系统在海上失事船只探测中的应用随着科技的不断进步,各国在海洋技术方面都有了长足的发展,国产多波束系统在海上失事船只探测中的应用已经成为了海上救援的重要工具。
本文将从多波束系统的基本原理、海上失事船只探测中的应用以及未来发展趋势三个方面来介绍国产多波束系统在海上失事船只探测中的应用。
多波束系统是一种新型的声纳探测技术,它利用多路传送器同时发射多束超声波,根据目标反射回来的声波信号得出目标位置及其物理状态,具有定位精度高、探测距离远、探测速度快等优点。
在海上船只探测中,多波束系统的应用具有重要意义。
多波束系统的工作原理是将初始声波信号分成多个小波束,多个小波束同时向不同的方向发射超声波,在接收处,多个声波信号相继叠加,形成一个完整的声波信号,从而实现对目标物的位置、大小、形状等信息的精确扫描和分析。
国产多波束系统在海上失事船只探测中的应用,既可以应用于海洋调查,也可以应用于海上救援。
在海上船只探测中,多波束系统可以检测到海底物体,包括地形、生物和物体。
在海上救援中,多波束系统可以帮助搜救人员快速定位海上失事船只,并通过声纳成像技术,对失事船只进行图像化探测和分析,帮助搜救人员了解失事船只的物理状态、船体朝向和位置等信息,从而帮助搜救人员制定更准确的救援方案和策略。
随着科技的不断发展,国产多波束系统在海上失事船只探测中的应用将进一步提高其探测精度和探测距离,同时也将提高其工作效率和工作速度。
未来的发展趋势是进一步完善多波束系统的探测技术,在保证探测精度的同时,尽可能减小系统体积和重量,使其更加适合在狭小的船舱中工作。
同时,国产多波束系统还需要加强其可靠性和稳定性,以确保其在恶劣海况下的正常工作。
此外,通过与其他海上调查和探测系统的集成,国产多波束系统的应用范围也将得到进一步扩展。
总之,国产多波束系统已经成为了海上失事船只探测中的重要工具,其应用将进一步提高海上救援的效率和成功率。
未来随着科技的不断发展,国产多波束系统在海洋技术领域中的应用前景将更加广阔。
《毫米波大规模MIMO系统波束选择和功率分配技术研究》篇一一、引言随着无线通信技术的飞速发展,毫米波大规模MIMO (Multiple Input Multiple Output,多输入多输出)系统因其高带宽、高数据传输速率等优势,已成为5G及未来通信网络的重要技术之一。
在该系统中,波束选择和功率分配技术是实现高效通信的关键技术之一。
本文将针对毫米波大规模MIMO系统的波束选择和功率分配技术进行深入研究,为无线通信技术的发展提供理论支撑。
二、毫米波大规模MIMO系统概述毫米波是指频率在30GHz到300GHz之间的电磁波。
大规模MIMO技术则是通过在基站和移动设备上安装大量天线,以提高信号传输的可靠性和数据传输速率。
毫米波大规模MIMO系统结合了毫米波的高频谱效率和大规模MIMO的高增益,为无线通信提供了新的可能性。
三、波束选择技术研究在毫米波大规模MIMO系统中,波束选择是关键技术之一。
由于毫米波的传播特性,其信号衰减较快,需要通过波束赋形技术来提高信号的传输质量和可靠性。
而波束选择则是根据信道状态信息(CSI)和用户需求,选择最优的波束进行数据传输。
首先,要准确获取CSI信息。
可以通过导频信号的传输和接收来估计信道状态信息,进而确定最佳的波束方向。
其次,要结合用户需求进行波束选择。
如根据用户的移动速度、信号质量等因素,动态调整波束的宽度和方向,以实现更好的通信效果。
此外,还可以采用基于机器学习的波束选择算法,通过训练模型来预测最佳的波束选择方案。
四、功率分配技术研究功率分配是毫米波大规模MIMO系统中的另一个关键技术。
由于系统中的天线数量较多,需要对各天线上的功率进行合理分配,以提高系统的整体性能。
功率分配的主要目标是实现资源的有效利用和干扰的最小化。
可以通过采用动态资源分配算法来实现功率分配的优化。
具体而言,可以根据用户的QoS需求、信道状态信息和系统的负载情况等因素,动态调整各天线的发射功率。