船舶设计原理(第三章)船舶重量重心
- 格式:pdf
- 大小:972.37 KB
- 文档页数:26
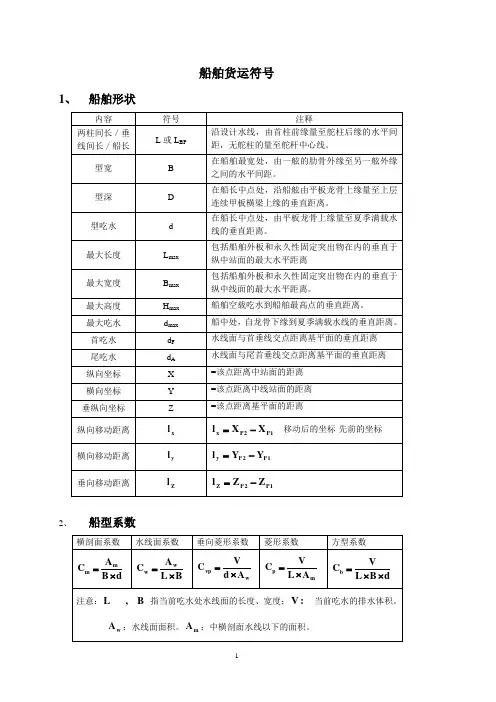
船舶货运符号1、船舶形状2、船型系数3、常用位置点3.其它4.稳性参数基本公式:第二章:近似算法梯形法 )2(00nni i y y y l A +-=∑= 辛一法 )4(31321y y y l A ++=辛二法 )33(834321y y y y l A +++=第三章:浮性1.重量、重心计算:i P D D ∑+=1 11)(1D M D X P X D X xp i g g i =⋅∑+⋅= 1)(1D Y P Y D Y i p i g g ⋅∑+⋅=11)(1D M D Z P Z D Z Zp i g g i =⋅∑+⋅=注意:利用合力矩定理,∑==n1i (力矩)分力对该轴或支点取的的力矩合力对某一支点或轴取其中:11g g 1g 1Z ,Y ,X ,∆为装卸后重量、重心。
g g g Z ,Y ,X ,∆为装卸前重量、重心,Pi Pi i P iZ ,Y ,X ,P ,为装卸货物重量、重心,装货为+,卸货为—x M :全船重量纵向力矩; Z M :全船重量的垂向力矩;2.少量装卸对吃水影响TPC100Pd P =δ W A TPC ρ01.0=其中:TPC -当前水域密度下的每厘米吃水吨数。
P -装卸货物重量,装货为+,卸货为—3.舷外水密度变化对船舶吃水的影响⎰=b aydxA⎪⎪⎭⎫ ⎝⎛-⨯=1100211ρρδρTPC Dd 其中: 1ρ-先前的水域密度;2ρ-后来的水域密度第四章 稳性1.初稳性高度定义式:g M Z Z GM -= M Z 根据型吃水查静水力资料,g Z 利用公式计算 2.船内垂移货物(初始正浮): Dpl GM M G z-=1 3.船内横移货物(初始正浮):GMD P tg y ⋅=θ4.自由液面的影响 Di GM M G xii ∑-=ρ1其中:自由液面修正量为 DiGMix i f∑=ρδx i -水线面的自由液面惯矩,对于矩形液面 3x lb 121i =对于等腰梯形液面)b b )(b b (481i 222121x ++=注意:GM 是指船舶装载与液体同重的固体时的初稳性高度,即没有考虑液体的流动性。


1.试航航速V t:一般指满载试航速度,即主机在最大持续功率的情况下,静止在水中(不超过三级风二级浪)的新船满载试航所测得的速度。
服务航速V S是指船平时营运时所使用的速度,一般是平均值。
2.续航力:一般指在规定的航速或主机功率情下,船上一次装足的燃料可供船连续航行的距离。
3.自持力:亦称自给力,指船上所带淡水和食品在海上所能维持的天数。
4.船级(船舶入级):是指新船准备入哪个船级社,要求取得什么船级标志,确定设计满足的规范。
5.积载因数C:对于干货船,通常用其表征货物所需的容积,即每吨货所要求的货舱容积数,单位是T/m3。
6.船型:是指船的建筑特征,包括上层建筑形式,机舱位置,货舱划分,甲板层数,甲板间高等。
7.载重量系数ηDW=D W0/Δ0:它表示D W0占Δ0的百分数,对同样Δ的船来说,ηDW大者,L W小,表示其载重多。
而对同一使用任务要求,即D W和其他要求相同时,ηDW 大者,说明Δ小些也能满足要求。
8.平方模数法:假定W h比例于船体结构部件的总面积(用L,B,D的某种组合)如W h=C h L(aB+bD)。
该方法对总纵强度问题不突出的的船,计算结果比较准确,适用于小船尤其是内河船。
9.立方模数法:假定W h比例于船的内部总体积(用LBD反映)则有W h=C h LBD。
该方法以船主体的内部体积为模数进行换算,C h值随L增加而减少的趋势比较稳定。
对大、中型船较为适用。
缺点:没有考虑船体的肥瘦程度,把LBD各要素对W h的影响看成是等同的。
明天10.诺曼系数N:,表示的是增加1Tdw时船所要增加的浮力。
11.载重型船:指船的载重量占船的排水量比例较大的船舶。
12.布置地位型船:又称容积型船,是指为布置各种用途的舱室,设备等需要较大的舱容及甲板面积的一类船舶。
13.失速:风浪失速是指船舶在海上航行,由于受风和浪的扰动,航行的速度较静水条件时的减少量,这种速度损失有时是相当大的。
14.甲板淹湿性:是指在波浪中的纵摇和垂荡异常激烈时,在船首柱处,船与波浪相对运动的幅值大于船首柱处的干舷,波浪涌上甲板的现象。

《船舶设计原理》习题集第一章绪论1.从船舶的用途角度,船舶一般分哪些类型?从船舶的用途角度,船舶一般分为军用船舶和民用船舶,民用船舶主要有运输船、工程船、工作船以及特殊用途船等类型。
2.对新船的设计,主要满足那几个方面的基本要求?适用、安全、经济和美观4个方面3.船舶设计遵循的基本原则:贯彻国家的技术政策遵守国际、国内各种公约、规范和规则充分考虑船东的要求4.民船设计技术任务书主要包括哪些内容?①航区、航线;②用途;③船型;④船级;⑤船舶主要尺度及型线;⑥船体结构;⑦动力装置;⑧航速、续航力;⑨船舶性能;⑩船舶设备;⑪船员配备及其舱室设施5.海船的航区如何划分?内河船的航区如何划分?遮蔽、沿海(Ⅲ类航区)、近海(Ⅱ类航区)和无限航区(Ⅰ类航区)内河船舶航行区域,根据水文和气象条件划分为A,B,C三级,其实某些水域,一句水流湍急情况,又划分为急流航段,即J级航段6.目前,我国将新建船舶的设计划分为哪几个阶段?制定产品设计技术任务书、报价设计、初步设计(合同设计)、详细设计、生产设计、完工设计7.何谓船舶的设计航速与服务速度、试航速度、自由航速?设计航速、服务航速:设计航速是指在船舶设计时理论上给定的速度,服务航速是船舶在航行时实际的速度,船舶会根据班期,风向,水流等多种因素来调整船舶速度。
一般按设计航速的85%计算。
试航速度:船舶在满载情况下,静水域中主机额定功率所能达到的速度叫试航速度。
8.解释:航速、续航力、自持力以及他们之间的关系航速(kn,km/h):民用运输船为要求达到的满载试航速度。
拖船常提出拖带航速、拖力的要求及自由航速的要求。
续航力(n mile,km):在规定的航速或主机功率下(民船通常按主机额定功率的85%~90%的螺旋桨设计点时),船上所携带的燃料储备可供航行的距离。
自持力(d):船上所携带的淡水河食品可供使用的天数。
9.船舶的六大性能:浮性、稳性、抗沉性、快速性、适航性、操纵性第二章海船法规的相关内容10. 船舶稳性衡准公式1/≥=f q l l K 中,q l 和f l 分别指什么,如何确定?q l :最小倾覆力臂,m ,应用计及船舶横摇影响后的动稳性曲线来确定 f l :风压倾侧力臂,m ,按下式计算f l =p A f Z/9810Δ11. 船舶的横摇角主要与哪些因素有关?船宽、吃水、初稳性高度、船舶类型和舭龙骨尺寸12. 按照法规要求,对干货船、油船、客船、集装箱船规定各核算哪些载况?干货船:满载出港、满载到港、压载出港、压载到港客船:满载出港、满载到港、满客无货出港、满客无货到港、压载出港、压载到港油船:满载出港、满载到港、部分装载出港、部分装载到港、压载出港、压载到港集装箱船:满载出港、满载到港、压载出港、压载到港13. 客船分舱和破舱稳性常规计算的目的是什么?保证船舶在一舱或数舱破损进水后仍能保持一定的稳态和稳性14. 主船体水密舱室划分时,如何决定其舱长?船舶处于最深分舱吃水时,船舶在一层或数层限定垂向浸水范围的甲板及其以下部分最大投影型长度(不一定对)15. 计算船舱进水后船舶浮态和稳性的基本方法有(增加重量法)和(损失浮力法)16. 解释:舱室渗透率、船舶的可浸长度及其曲线、安全限界线、分舱因数、分舱指数舱室渗透率:舱室渗透率是船舶破损后,在限界线下的被水侵占的舱室容积与各舱室容积之比。
112.8重力与浮力的平衡方法第二章船舶重量重心2.8 重力与浮力的平衡方法LW()DW()()+=∆x x x 一、问题的提出船舶在静水中的平衡条件要求然而,根据初选主尺度要素估算出来的船舶排水量和船舶重量,一般是不会相等的,即浮力和重力不平衡。
因此,需要通过调整来实现平衡。
[]TB WP L B D dC C C =x 式中,船舶表征向量2.8 重力与浮力的平衡方法一、问题的提出一般而言,假设重量的估算是正确的。
因为,即使重量的估算存在误差,但至少目前没有依据随意地修改重量估算的结果。
因此,我们可以通过调整主尺度来调整浮力,逐步实现重力和浮力的平衡。
那么,应该调整多少浮力是合适的,这是需要考虑的一个问题。
例如(1)DW=17,500吨=23,500∆吨任务书要求的载重量依据主尺度初估的排水量LW=6,500吨初估的空船重量+>(2)DW=17,500吨=24,000∆吨+>+500吨+X 吨总重量多500吨但是,仍然不平衡由此可见:排水量的增量应大于500吨。
但是大多少合理呢?为了回答上述问题,人们引入了诺曼系数(Normand)的概念。
2.8 重力与浮力的平衡方法一、问题的提出排水量:增加500吨空船重量:增加X 吨LW=6,500+X 吨吨诺曼系数定义为排水量变化与载重量变化的比值,即=DWN δδ∆二、诺曼系数2.8 重力与浮力的平衡方法式中,为诺曼系数为排水量的变化为载重量的变化N δ∆DW δ诺曼系数可以理解为排水量随载重量变化曲线的斜率。
LW+DW=DWH O M W W W ∆=+++船舶在静水中的平衡条件要求DW O H MW W W δδδδδ∂∂∂∆=∆+∆+∆+∂∆∂∆∂∆则排水量(Δ)的变化为2.8 重力与浮力的平衡方法二、诺曼系数H H W C α=∆OO W C β=∆MM W C γ=∆假设1()H H H H W C W C ααααα−∂∆=∆==∂∆∆∆1()O OO O W C W C βββββ−∂∆=∆==∂∆∆∆1()M MM M W C W C γγγγγ−∂∆=∆==∂∆∆∆则有2.8 重力与浮力的平衡方法二、诺曼系数DWO H MW W W δαδβδγδδ∆=∆+∆+∆+∆∆∆可得1DW1O H M W W W δδαβγ∆=−++ ∆∆∆1DW1OHM NW W W δδαβγ∆==−++ ∆∆∆诺曼系数N 具有下列性质二、诺曼系数●诺曼系数N >1;●诺曼系数N 的大小与空船重量占排水量的比例大小有关;●诺曼系数N 的数值依赖于空船重量的各项分量与排水量的关系;●当α=β=γ=1 时,诺曼系数与载重量系数互为倒数。
船舶建造过程中重量重心控制方法摘要:为解决建造实船重量、重心与设计目标不符等问题,船舶建造中需进行重量、重心控制,而其中船舶总段重量、重心控制难度较大。
以船舶总段为对象,综合分析船舶轻量化因素,船舶重量中心的控制分为生产设计阶段的载荷控制以及建造阶段的重量控制。
在建造过程中的载荷称重也是重量中心控制的一项关键工作。
重量重心控制还需要造船厂提高认识加强管理。
关键词:船舶建造;重量重心;控制方法前言轻量化研究已从飞机、汽车领域拓展逐步至船舶领域,尤其是在海洋平台方面,轻量化作为一个重要的标准落实到设计和生产过程中。
在海洋平台建造中,生产设备重量变化是造成重量、重心误差的主要因素。
然而,船舶相比于海工,影响其重量、重心的因素却有很多。
1船舶轻量化建造船舶建造过程中的重量误差积累占导致重量和重心误差原因的很大一部分,尤其是艏艉端分段的重量对重心位置的影响最大。
大型船舶总段不便于称重,导致在建造过程中工程师对其重量、重心难以把握。
因此,控制好总段内每个小分段乃至构件的重量大小,分配好公差,是船舶轻量化建造以及重量、重心控制的重要手段之一,这也对建造者的管理能力提出巨大挑战。
船舶建造主要可以分以下几个阶段:构件阶段、组件阶段、分段阶段、总段阶段、超大总段阶段以及船体阶段。
为控制船舶总段乃至船体重量大小和重心位置,每个阶段都需统计信息。
构件称重方便,也最易统计,要想实现精细化造船,则应从构件阶段开始统计,随后依次上升,按照船舶各个阶段顺序进行管理。
重心位置可以以选件的安装线为基准,朝向船首为正,船尾为负。
在各个阶段,统计其阶段结构物的重量大小和重心位置,以设计时的编号为排序,依次排列收入数据库。
2船舶重量中心控制的两个阶段船舶建造是一个周期较长,技术复杂的过程,船舶建造过程中的重量重心控制要贯穿于船舶建造的过程之中,本文将船舶重量重心的控制分为两个阶段,分别是生产设计阶段的载荷控制、建造阶段的载荷控制。
2.1生产设计阶段的载荷控制生产设计阶段已经能够将全船的设备型号,管系、电缆布置走向等设计细节完成,换句话讲就是已经在电脑上将船舶造出来了。

第一章船舶设计概要1.船舶设计工作具有哪些特点?答:(1)必须贯彻系统工程的思想,考虑问题要全面,决策时要统筹兼顾;在总体设计中一定要处理好主要矛盾和次要矛盾的关系,要协调好各部门的工作,既要使船舶的各部分充分发挥自身功能,又要是相互关系达到最佳的配合。
(2)船舶设计的另一个特点是:设计工作是由粗到细、逐步近似、反复迭代完成的。
船舶设计也可以说是一个多参数、多目标、多约束的求解和优化问题。
2.船舶设计有哪些基本要求?(1)适用、经济(2)安全、可靠(3)先进、美观3.新船设计的基本依据是“设计技术任务书”,它反映了船东对新船的主要要求。
请问设计技术任务书通常是如何制定的?运输船舶的设计技术任务书一般包括哪些基本内容?答:(1)设计技术任务书是用船部门根据需要和可能,经船型的技术经济论证后得出的。
船型的技术经济论证是对不同船型方案的投资规模、经济效益和技术上的可行性进行比较和分析。
(2)一般运输船舶的设计技术任务书包括以下基本内容:1)航区和航线海船航区是根据航线离岸距离和风浪情况来划分的。
航区不同,对船舶的安全性和配备配置要求不同。
我国法规对非国际航行海船的航区划分为远海航区、近海航区、沿海航区、遮蔽航区。
内河船的航区根据不同水系或湖泊的风浪情况划分为A级、B级、C级等。
2)船型这里的船型是指船舶的类型、甲板层数、机舱部位、首尾形状和其他特征。
3)用途新船的使用要求,通常给出货运的货物种类和数量以及货物的理化性质和其他要求。
4)船籍和船级船级是指新船准备入哪个船级社,要求取得什么船级标志,确定设计应满足的规范。
船籍是指在哪国登记注册的船舶,确定新船应遵守的船籍国政府颁布的法定检验规则。
5)动力装置给出主机和发电机组的类型、台数、燃油品质和推进方式。
6)航速和功率储备对航速一般给出服务航速(kn,节,海里/小时)。
服务航速是指在一定的功率储备下新船满载能够达到的航速。
对拖船通常提出拖带航速下拖力的要求或自由航速的要求。
第三章 船舶重量与重心3.1 概述排水量是船舶技术性能的重要参数之一,是船舶设计中各项性能计算的重要依据。
船舶的排水量即为组成船舶的各项重量之和。
船舶的重心位置关系到浮态和稳性。
因此,船舶设计和建造中必须尽量准确地计算并控制船舶的重量与重心位置,这是保证船舶各项性能的基本条件。
船舶的重量可分为空船重量和载重量两大部分。
空船重量是船舶的一项重要指标,载重量反映了船舶的装载能力。
在船舶的各个设计阶段,重量和重心的估算或计算都是一项必不可少的重要工作。
它是随着设计阶段的不断深入,逐步近似,由粗略到精确。
本章主要介绍在船舶设计初期,如何对船的重量重心进行分析,寻求它们与船的主尺度和主要要素之间的联系规律,以便能较准确地进行估算,同时也介绍一些具体的估算方法。
3.1.1 平衡条件根据浮性原理,船舶于静水中平衡的条件是:重力等于浮力;重力与浮力的作用线在同一垂直线上。
如图3.1.1所示。
图3.1.1 船舶浮于水面的平衡条件船在某一装载情况下的总重量为i W ∑(单位为:吨,用t 表示),此时船体排开水的重量(即排水量)为BkLBdCk ρρ=∇=∆ (3.1.1)式中:ρ──水的质量密度(3m t ),海水一般为1.025;淡水为1.0; ∇──该装载情况下的型排水体积(3m );k──附体体积系数。
因为∇为型排水体积,它不包括外板厚度及附体(如舵、螺旋桨、轴支架、舭龙骨等)在内,k 值是考虑这些因素后的系数,通常 为1.002~1.010,大船取小值,小船取大值,一般可取1.006。
B C d B L 、、、──分别为船长(通常为PP L )、型宽、吃水及方形系数。
根据平衡条件可得浮性方程式:Bi kLBdCW ρ==∆∑ (3.1.2)3.1.2 民船重量分类及典型载况 1. 重量分类船在某一装载情况下的总重量就是此时的排水量∆,它由各部分重量组成。
通常在设计中将排水量分成空船重量和载重量两部分,即DWLW +=∆ (3.1.3)式中:LW ──空船重量(t );民船设计中通常将其分为船体钢料重量H W 、舾装重量 O W 和机电设备重量M W 三大部分,即M O H W W W LW ++=;DW──载重量(t );包括货物、旅客、船员、行李、油水(燃油、滑油、淡水等)、食品、备品、供应品以及压载水等。
第三章重心和形心第十讲重心和形心第十讲重心和形心目的要求:掌握平面组合图形形心的计算。
教学重点:分割法和负面积法计算形心。
教学难点:对计算形心公式的理解。
教学内容:§3-4 重心和形心一、重心的概念:1、重心的有关知识,在工程实践中是很有用的,必须要加以掌握。
2、重力的概念:重力就是地球对物体的吸引力。
3、物体的重心:物体的重力的合力作用点称为物体的重心。
无论物体怎样放置,重心总是一个确定点,重心的位置保持不变。
二、重心座标的公式:(1)、重心座标的公式三、物体质心的坐标公式在重心坐标公式中,若将G=mg,G i=m i g代入并消去g,可得物体的质心坐标公式如下:四、均质物体的形心坐标公式若物体为均质的,设其密度为ρ,总体积为V,微元的体积为V i,则G=ρgV,G i=ρgV i,代入重心坐标公式,即可得到均质物体的形心坐标公式如下:式中V=∑Vi。
在均质重力场中,均质物体的重心、质心和形心的位置重合。
五、均质等厚薄板的重心(平面组合图形形心)公式:令式中的∑A i.x i=A.x c=S y;∑A i.y i=A.y c=S x则S y、S x分别称为平面图形对y轴和x轴的静矩或截面一次矩。
六、物体重心位置的求法工程中,几种常见的求物体重心的方法简介如下:1、对称法凡是具有对称面、对称轴或对称中心的简单形状的均质物体,其重心一定在它的对称面、对称轴和对称中心上。
对称法求重心的应用见下图。
2、试验法对于形状复杂,不便于利用公式计算的物体,常用试验法确定其重心位置,常用的试验法有悬挂法和称重法。
(1)、悬挂法利用二力平衡公理,将物体用绳悬挂两次,重心必定在两次绳延长线的交点上。
悬挂法确定物体的重心方法见图(2)、称重法对于体积庞大或形状复杂的零件以及由许多构件所组成的机械,常用称重法来测定其重心的位置。
例如,用称重法来测定连杆重心位置。
(3)、分割法:工程中的零部件往往是由几个简单基本图形组合而成的,在计算它们的形心时,可先将其分割为几块基本图形,利用查表法查出每块图形的形心位置与面积,然后利用形心计算公式求出整体的形心位置。