基于ROS的远程车辆控制和目标跟随系统设计
- 格式:pdf
- 大小:565.15 KB
- 文档页数:3

信息通信INFORMATION&COMMUNICATIONS2020 (Sum.No212)2020年第8期(总第212期)基于ROS平台的特定目标自跟随机器人的设计忽晓伟,支开来,赵一方(郑州西亚斯学院电子信息工程学院,河南新郑451150)摘要:文章介绍了一种基于ROS平台的自跟随机器人,机器人的主控分为ROS系统运行的大脑树莓派3B和控制底盘运动的小脑STM32,大脑与小脑通过串口通信,ROS系统部分节点根据需要采用Python语言编写,实现话题的发布和订阅。
树莓派搭载摄像头和激光雷达;机器人底盘由STM32,超声波模块,电机驱动模块,电机和全向轮组成。
被跟随者背后贴有特殊颜色拼块,树莓派通过摄像头采集图像信息,识别采集颜色拼块信息,判断是否为被跟随目标,并根据色块在视野中的坐标发布控制话题,调整机器人行进方向。
由于机器人配置的是全向轮,可实现机器人的平移运动,更易于目标的跟随。
机器人通过激光雷达判断与目标的距离,防止发生碰撞,并可实现避障,超声波用于透光障碍物的识别。
关键词:ROS;树莓派;目标跟踪;颜色识别中图分类号:TP18文献标识码:A文章编号:1673-1131(2020)08-0122-020引言随着科技的快速发展,智能机器人在各个领域有了大量的应用。
大部分采用AGV模式,需要对场地进行改造,才能实现机器人的引导,对于一些复杂场景的搬运,采用AGV已经有些不适合叫因此迫切需要研发出一种目标跟随机器人。
本文就提出了一种目标跟随机器人方案的设计。
1系统需求及方案设计机器人整体的方案可釆用单片机直接读取一些传感器,比如多个红外传感器,可实现目标的位置计算,但对于特定目标的识别是无法做到的叫要实现对特定目标的跟随需要使用图像的识别。
对于单片机为主控的机器人,对于图像处理这种复杂的处理是无法实现的,并且对于不同的任务,都需要对系统重新编写程序和算法。
基于ROS系统的机器人可以避免重新造轮子,因为运行在树莓派或者笔记本上,可实现一些复杂的算法,比如图像处理等。
基于ROS的移动机器人视觉跟随系统设计移动机器人视觉跟随系统是指一种可以通过视觉传感器识别目标,并通过控制移动机器人实现目标跟随的系统。
在现实生活中,移动机器人视觉跟随系统已经广泛应用于自动巡航、物流配送、机器人陪护等领域。
本文将介绍一种基于ROS的移动机器人视觉跟随系统设计。
我们需要选择适合的硬件平台和软件框架。
在硬件平台方面,我们可以选择一台具备机械臂和激光雷达等传感器的移动机器人。
在软件框架方面,我们选择ROS作为我们的开发平台,因为ROS提供了丰富的机器人操作系统功能,可以方便地进行机器人控制和传感器数据处理。
接下来,我们需要设计移动机器人的硬件系统。
在这个系统中,我们需要将机械臂和激光雷达等传感器与ROS系统进行连接,以便进行数据的传输和控制。
我们还需要选择一种适合的图像传感器,用于目标识别。
目前,常用的图像传感器有摄像头和深度相机等。
然后,我们需要设计移动机器人的软件系统。
在这个系统中,我们需要编写ROS节点来实现相关功能。
我们需要编写一个目标识别节点,用于从图像传感器中获取图像,并使用计算机视觉算法进行目标识别。
常用的目标识别算法有卷积神经网络、支持向量机等。
然后,我们需要编写一个控制节点,用于通过ROS的机器人操作接口控制移动机器人实现目标跟随。
我们还需要编写其他辅助节点,用于数据的传输和处理等。
我们需要进行系统的集成和测试。
在集成的过程中,我们需要将硬件系统和软件系统进行连接,并进行相关参数的调整和校准。
在测试的过程中,我们需要验证系统的功能和性能是否满足要求,并进行相应的优化和调整。
基于ROS的移动机器人视觉跟随系统设计涉及到硬件系统的选择和设计、软件系统的编写和集成以及系统的测试和优化等方面。
只有在以上各个方面都做好工作,才能够设计出一个功能强大且稳定可靠的移动机器人视觉跟随系统。
______________________________________________信息记录材料2019年9月第20卷第9期国耍亍丽禹互联]基于ROS系统智能小车控制与监控方法尹贺,宋家盛(吉林大学珠海学院广东珠海519041)【摘要】本文提出了基于ROS系统智能小车在WIFI无线网络通信下的手机远程控制和视频监控方案。
WIFI无线通信具有覆盖面积大和传输速度较快的优点,可以使机器人在特殊的场景下工作.ROS智能小车具有定点导航,智能避障,自动巡迹,远程遥控等功能,并且拥有稳定性强,功耗较低,经济实用的优势。
通过智能手机将无线通信和ROS小车结合起来,达到人们对智能产品的细化需求.【关键词】树莓派;STM32;ROS系统;摄像头;WIFI;手机应用程序【中图分类号】TP274【文献标识码】A【文章编号】1009-5624(2019)09-0223-021引言随着机器人领域的发展和人工智能的热潮,无线控制技术发展越来越快,迫切的需要一个通用的平台来让研究人员进行二次开发。
基于ROS系统的智能小车拥有强大而灵活的机器人编程框架,从软件构架的角度说,它是一种基于消息传递通信的分布式多进程框架。
基于ROS本身是消息机制,开发者可以根据功能把软件拆分成各个模块,每个模块负责读取和分发消息,模块间通过消息关联。
本文主要讲述用手机应用程序通过网络通信协议对ROS智能小车实现无线控制和视频监控功能。
2ROS小车功能结构设计ROS智能小车系统设计主要包括主控制区,步进电机,摄像头,路由器以及手机应用程序部分。
主要功能实现为树莓派发送指令给拓展板,拓展板进而控制步进电机运动,同时摄像头把视频信号传输给树莓派,树莓派把视频信息压缩传给路由器,路由器通过WIFI将内容传送到手机应用程序,手机应用程序也可以通过WIFI发送控制命令给树莓派。
2.1主控制区由控制板树莓派3b+和拓展版Open CR 构成控制板树莓派3b+搭载Broadcom ARM53处理器和BCM43143WiFi,主要负责对数据分析以及无线通信。
基于ROS的移动机器人视觉跟随系统设计移动机器人视觉跟随系统是一种利用机器人视觉技术,实现机器人能够跟随目标物体运动的系统。
基于ROS(Robot Operating System)的移动机器人视觉跟随系统设计,可以实现机器人自主地跟随人或物体移动,具有广泛的应用领域,如室内导航、仓库管理、服务机器人等。
在设计移动机器人视觉跟随系统时,需要考虑以下几个关键步骤:1.目标检测和识别:利用机器人视觉技术,对目标物体进行检测和识别。
常用的方法有基于颜色和形状的检测算法,以及深度学习算法(如卷积神经网络)。
2.目标跟踪:通过跟踪算法,实现对目标物体的实时跟踪。
跟踪算法可以基于特征点、边缘、轮廓等进行目标定位和追踪。
3.移动控制:根据目标物体的位置和运动信息,设计合适的移动控制算法,使机器人能够自主地跟随目标物体。
常见的移动控制算法包括PID 控制、适应性控制和模糊控制等。
4.传感器融合:结合机器人的其他传感器(如激光传感器、惯性传感器等),对目标物体进行精确的位置跟踪和运动估计。
5.环境建模与地图构建:基于机器人的传感器数据,对环境进行建模和地图构建,以提供机器人的位置估计和导航功能。
在设计过程中,可以选择ROS作为开发平台和框架,利用ROS的优势来实现模块化和分布式的系统架构。
可以利用ROS的图像处理库(如OpenCV)和机器人导航库(如Navigation Stack)来加速开发过程。
此外,还需要考虑系统的实时性和稳定性。
移动机器人视觉跟随系统通常需要在实时环境中运行,对延迟和噪声有较高的要求。
可以利用ROS 的消息传递机制和多线程编程,来提高系统的实时性和稳定性。
总之,基于ROS的移动机器人视觉跟随系统设计需要考虑目标检测和识别、目标跟踪、移动控制、传感器融合、环境建模与地图构建等关键步骤。
利用ROS的优势和功能,可以实现模块化和分布式的系统架构,同时考虑系统的实时性和稳定性。
这样设计出的系统能够实现机器人自主地跟随目标物体运动,具有广泛的应用潜力。
本期推荐本栏目责任编辑:李雅琪基于ROS 目标跟踪移动机器人设计与实验金志熙,王宏远,勾尤旭,郝佳鑫(天津工业大学,天津300387)摘要:目标跟踪技术在机器人领域中占据非常重要的一部分,可应用于日常生活、军事工业等多个领域。
该文采用改进的KCF 算法,基于ROS (Robot Operating System )搭建目标跟踪移动机器人。
该机器人主要由驱动执行系统、传感系统和控制系统组成。
利用Kinect 深度摄像头和hector_slam 算法建立环境地图,再利用KCF 算法进行目标识别与跟踪,获取目标位置,利用move_base 功能包实现机器人的导航。
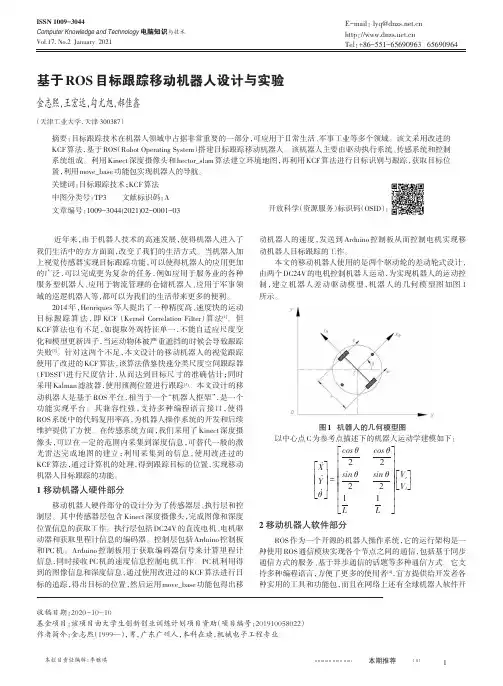
关键词:目标跟踪技术;KCF 算法中图分类号:TP3文献标识码:A文章编号:1009-3044(2021)02-0001-03开放科学(资源服务)标识码(OSID ):近年来,由于机器人技术的高速发展,使得机器人进入了我们生活中的方方面面,改变了我们的生活方式。
当机器人加上视觉传感器实现目标跟踪功能,可以使得机器人的应用更加的广泛,可以完成更为复杂的任务,例如应用于服务业的各种服务型机器人、应用于物流管理的仓储机器人、应用于军事领域的巡逻机器人等,都可以为我们的生活带来更多的便利。
2014年,Henriques 等人提出了一种精度高、速度快的运动目标跟踪算法,即KCF (Kernel Correlation Filter )算法[1]。
但KCF 算法也有不足,如提取外观特征单一,不能自适应尺度变化和模型更新因子,当运动物体被严重遮挡的时候会导致跟踪失败[2]。
针对这两个不足,本文设计的移动机器人的视觉跟踪使用了改进的KCF 算法,该算法借鉴快速分类尺度空间跟踪器(FDSST )进行尺度估计,从而达到目标尺寸的准确估计;同时采用Kalman 滤波器,使用预测位置进行跟踪[3]。
本文设计的移动机器人是基于ROS 平台,相当于一个“机器人框架”,是一个功能实现平台。
基于ROS平台的智能车运动线控系统设计及实现王小华;郑腾;孙伟;苗中华【摘要】针对无人操作智能车辆依靠特定硬件平台等问题,提出了一种基于ROS平台的无人小车的低成本运动线控系统解决方案.该方案基于上位机和下位机的控制结构,上位机代替驾驶员的功能负责决策,下位机负责执行命令.重点给出了上位机、下位机以及上下位机通信的软硬件设计思路和方法,并在ROS平台上使用了Modbus通信,构建了一个结构相对简单、功能可行的低速的无人车运动控制系统.该解决方案的所有软件都是开源或可自行设计的,为更多的研究人员以更低成本研究无人智能车提供了参考.实验结果表明,该运动控制系统解决方案是可行并且有效的,未来可应用于园区、学校等地的小型无人车的控制系统设计.【期刊名称】《测控技术》【年(卷),期】2019(038)004【总页数】4页(P22-25)【关键词】智能车;ROS;运动控制;Modbus【作者】王小华;郑腾;孙伟;苗中华【作者单位】上海大学机电工程与自动化学院,上海200444;上海大学机电工程与自动化学院,上海200444;上海大学机电工程与自动化学院,上海200444;上海大学机电工程与自动化学院,上海200444【正文语种】中文【中图分类】TP273随着科学技术的日益发展,机器人技术逐渐渗透到各个领域,这些领域对自动化以及智能化的要求也越来越高,移动机器人就是其中的热点之一。
智能车又称作轮式移动机器人,是一种集环境感知、车辆定位、运动控制三大基本功能于一体的综合系统[1]。
由于移动机器人的定位、导航、避障、规划与决策算法都需要用硬件平台来进行实验验证,所以对于移动机器人平台的研究是整个移动机器人技术研究的基石。
当下,市场上也有一些应用于科学研究的移动机器人平台,例如Pioneer3-DX、TurtleBot、EAI、Autolabor等[2]。
研究表明,市面上现有的移动机器人平台仍然存在一些不足之处:① 虽然性能优良,运行也较为稳定,但是底层设计细节几乎是封闭式的,不支持完全开源且移植性能差,不利于二次维护和开发;② 方便搭载多个传感器且外形合适的硬件平台大多数产于国外,价格昂贵,中小型科研团队难以承担高昂费用[2]。
基于ROS的无人车控制系统设计与实现目录1. 系统设计与概要 (2)1.1 系统需求分析 (2)1.2 系统架构设计 (4)1.3 系统功能模块划分 (5)2. ROS机器人操作系统介绍与配置 (6)3. 无人车底盘控制设计 (7)3.1 底盘控制系统概述 (9)3.2 底盘控制器设计 (10)3.3 底盘传感器数据采集与处理 (12)3.4 底盘控制算法实现 (13)4. 无人车导航与定位设计 (16)4.1 导航与定位系统概述 (17)4.2 GPS/INS组合定位算法实现 (19)4.3 SLAM技术在无人车导航中的应用 (20)4.4 路径规划与避障算法实现 (21)5. 无人车感知设计与实现 (23)5.1 感知系统概述 (25)5.2 摄像头、激光雷达等传感器数据采集与处理 (26)5.3 目标检测与跟踪算法实现 (27)5.4 语义分割与实例分割算法实现 (28)6. 无人车运动控制设计与实现 (31)6.1 运动控制系统概述 (32)6.2 运动控制器设计 (34)6.3 运动状态估计算法实现 (35)6.4 运动控制算法优化与调试 (37)7. 无人车人机交互设计与实现 (38)7.1 人机交互系统概述 (39)7.2 显示设备设计与实现 (40)7.3 语音识别与合成算法实现 (43)7.4 手势识别与控制算法实现 (43)8. 系统集成与应用测试 (45)8.1 系统集成与硬件连接设计 (46)8.2 软件集成与调试 (48)8.3 无人车实际道路测试与性能评估 (49)8.4 无人车应用场景探索与开发 (51)1. 系统设计与概要本项目旨在设计并实现基于的多传感器融合无人车控制系统,该系统将利用强大的功能框架,实现无人车感知、决策和控制的模块化设计,并通过实时数据流和节点间通信,实现系统高效协同工作。
感知层:包括激光雷达、摄像头等传感器,负责获取车辆周围的环境信息并进行数据预处理。
《基于ROS的机器人路径导航系统的设计与实现》一、引言随着机器人技术的飞速发展,其在各种场景中的应用变得越来越广泛。
机器人路径导航系统作为机器人技术的重要组成部分,对于实现机器人的自主导航和运动控制具有重要意义。
本文将介绍一种基于ROS(Robot Operating System)的机器人路径导航系统的设计与实现,旨在为机器人提供高效、准确的路径规划和导航能力。
二、系统设计1. 整体架构设计本系统采用分层设计的思想,整体架构包括感知层、决策层和执行层。
感知层负责获取机器人周围环境信息,决策层负责根据环境信息规划出最佳路径,执行层负责控制机器人按照规划的路径进行运动。
系统基于ROS进行开发,利用ROS的模块化、可扩展性等特点,实现系统的快速开发和部署。
2. 感知层设计感知层主要包括传感器和数据处理模块。
传感器包括激光雷达、摄像头等,用于获取机器人周围的环境信息。
数据处理模块负责对传感器数据进行处理和分析,提取出有用的环境信息,如障碍物位置、地形信息等。
3. 决策层设计决策层是整个系统的核心部分,负责根据感知层提供的环境信息,规划出从起点到终点的最佳路径。
本系统采用基于A算法的路径规划方法,通过构建栅格地图和启发式函数,实现快速、准确的路径规划。
此外,系统还考虑了机器人的运动学约束和能量消耗等因素,以实现更加智能的路径规划。
4. 执行层设计执行层主要负责控制机器人的运动。
本系统采用ROS的MoveIt!框架,通过ROS节点控制机器人的运动。
在执行层中,系统根据决策层规划的路径,控制机器人的电机、轮子等执行机构,实现机器人的自主导航和运动控制。
三、系统实现1. 环境搭建本系统基于ROS进行开发,需要在Ubuntu等Linux操作系统上搭建ROS环境。
首先需要安装ROS及相关依赖库,然后配置ROS工作空间和节点通信等。
2. 传感器数据获取与处理传感器数据获取与处理是系统实现的关键步骤。
通过激光雷达和摄像头等传感器获取机器人周围的环境信息,然后通过数据处理模块对传感器数据进行处理和分析,提取出有用的环境信息。
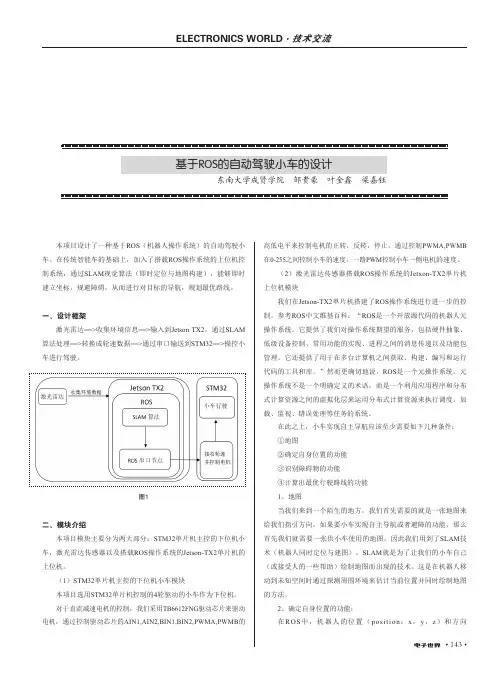
• 143•本项目设计了一种基于ROS (机器人操作系统)的自动驾驶小车。
在传统智能车的基础上,加入了搭载ROS 操作系统的上位机控制系统,通过SLAM 视觉算法(即时定位与地图构建),能够即时建立坐标,规避障碍,从而进行对目标的导航,规划最优路线。
一、设计框架激光雷达==>收集环境信息==>输入到Jetson TX2,通过SLAM 算法处理==>转换成轮速数据==>通过串口输送到STM32==>操控小车进行驾驶。
图1二、模块介绍本项目模块主要分为两大部分:STM32单片机主控的下位机小车,激光雷达传感器以及搭载ROS 操作系统的Jetson-TX2单片机的上位机。
(1)STM32单片机主控的下位机小车模块本项目选用STM32单片机控制的4轮驱动的小车作为下位机。
对于直流减速电机的控制,我们采用TB6612FNG 驱动芯片来驱动电机,通过控制驱动芯片的AIN1,AIN2,BIN1,BIN2,PWMA,PWMB 的基于ROS的自动驾驶小车的设计东南大学成贤学院 邹贵豪 叶金鑫 梁嘉钰高低电平来控制电机的正转,反转,停止,通过控制PWMA,PWMB 在0-255之间控制小车的速度。
一路PWM 控制小车一侧电机的速度。
(2)激光雷达传感器搭载ROS 操作系统的Jetxon-TX2单片机上位机模块我们在Jetson-TX2单片机搭建了ROS 操作系统进行进一步的控制。
参考ROS 中文维基百科:“ROS 是一个开放源代码的机器人元操作系统。
它提供了我们对操作系统期望的服务,包括硬件抽象、低级设备控制、常用功能的实现、进程之间的消息传递以及功能包管理。
它还提供了用于在多台计算机之间获取、构建、编写和运行代码的工具和库。
”然而更确切地说,ROS 是一个元操作系统。
元操作系统不是一个明确定义的术语,而是一个利用应用程序和分布式计算资源之间的虚拟化层来运用分布式计算资源来执行调度、加载、监视、错误处理等任务的系统。
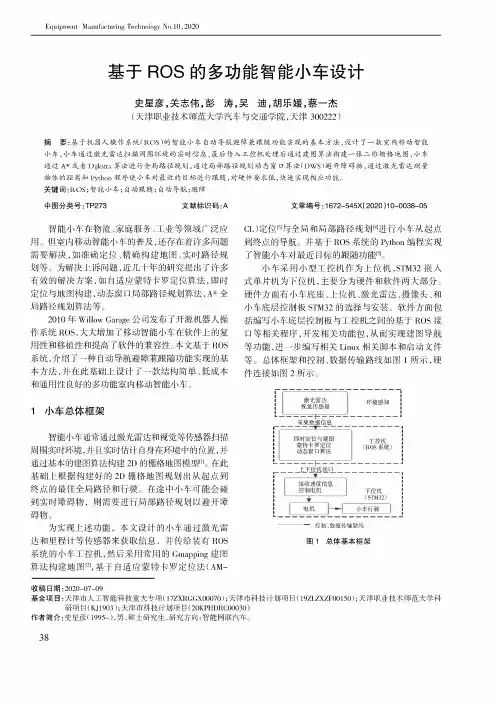
Equipment Manufacturing Technology No.10,2020基于ROS的多功能智能小车设计史星彦,关志伟,彭涛,吴迪,胡乐媛,蔡一杰(天津职业技术师范大学汽车与交通学院,天津300222)摘要:基于机器人操作系统(ROS)的智能小车自动导航避障兼跟随功能实现的基本方法,设计了一款室内移动智能小车,小车通过激光雷达扫描周围环境的实时信息,最后传入工控机处理后通过建图算法构建一张二维栅格地图,小车通过A*或者Dijkstra算法进行全局路径规划,通过局部路径规划动态窗口算法(DWS)避开障碍物,通过激光雷达测量物体的距离和Python程序使小车对最近的目标进行跟随,对硬件要求低,快速实现相应功能。
关键词:ROS;智能小车;自动跟随;自动导航;避障中图分类号:TP273文献标识码:A文章编号:1672-545X(2020)10-0038-05智能小车在物流、家庭服务、工业等领域广泛应用。
但室内移动智能小车的普及,还存在着许多问题需要解决,如准确定位、精确构建地图、实时路径规划等。
为解决上诉问题,近几十年的研究提出了许多有效的解决方案,如自适应蒙特卡罗定位算法,即时定位与地图构建,动态窗口局部路径规划算法,A*全局路径规划算法等。
2010年Willow Garage公司发布了开源机器人操作系统ROS,大大增加了移动智能小车在软件上的复用性和移植性和提高了软件的兼容性。
本文基于ROS 系统,介绍了一种自动导航避障兼跟随功能实现的基本方法,并在此基础上设计了一款结构简单、低成本和通用性良好的多功能室内移动智能小车。
1小车总体框架智能小车通常通过激光雷达和视觉等传感器扫描周围实时环境,并且实时估计自身在环境中的位置,并通过基本的建图算法构建2D的栅格地图模型[1]o在此基础上根据构建好的2D栅格地图规划出从起点到终点的最佳全局路径和行驶。
在途中小车可能会碰到实时障碍物,则需要进行局部路径规划以避开障碍物。
基于ROS的自动驾驶系统设计与控制自动驾驶技术是现代汽车行业的热门话题,通过无人驾驶技术,车辆可以实现自主导航、避障、自动停车等功能。
ROS(机器人操作系统)是一个灵活的开源平台,可用于构建自动驾驶系统的设计与控制。
本文将介绍基于ROS的自动驾驶系统的设计与控制的关键要点。
首先,自动驾驶系统的设计中最重要的一步是感知环境。
通过使用各种传感器,如激光雷达、摄像头和超声波传感器,可以获取车辆周围环境的数据。
ROS提供了许多优秀的传感器驱动程序和图像处理库,可用于实时获取和处理传感器数据。
通过ROS的话题(topic)机制,可以方便地将传感器数据与其他组件进行通信和集成。
其次,自动驾驶系统需要对感知到的环境进行理解和推理,以便做出相应的决策。
ROS提供了强大的计算机视觉功能,包括目标检测、目标跟踪和道路识别等。
利用ROS的机器学习库,如OpenCV和TensorFlow,可以对图像数据进行处理和分析。
通过与传感器数据的融合,可以准确地识别并定位车辆周围的物体和道路。
在感知和推理的基础上,自动驾驶系统需要实现相应的控制算法,以控制车辆的运动和驾驶行为。
ROS提供了丰富的机器人控制库和算法,如导航栈(navigation stack)和移动基础(move_base),可以进行路径规划、运动控制和避障等。
通过ROS的控制器接口,可以方便地集成不同类型的操纵装置和执行器,如电机控制器和转向系统。
此外,自动驾驶系统还需要与车辆的其他系统进行协调和通信。
ROS提供了轻量级通信机制,如服务(service)和参数服务器(parameter server),可用于实施系统的分布式计算和通信。
通过使用ROS软件包和节点,可以实现与车辆的车载电子系统、信息娱乐系统和车辆网络的集成。
最后,自动驾驶系统的设计与控制还需要考虑安全性和可靠性。
ROS提供了强大的故障处理和错误检测机制,通过使用ROS的日志记录和调试工具,可以及时发现和解决系统故障。
基于ROS的移动机器人视觉跟随系统设计摘要随着机器人技术的不断发展,移动机器人的应用范围也越来越广泛。
视觉跟随系统是移动机器人常见的一种应用场景,能够实现机器人对目标物体的自主跟随和导航。
本文基于ROS(机器人操作系统)平台,设计了一种基于视觉的移动机器人跟随系统,通过机器人搭载的相机传感器采集环境信息,利用图像处理技术实现目标检测和跟随算法,实现机器人对目标物体的识别和跟随。
本文首先介绍了ROS平台的基本概念和特点,然后介绍了移动机器人视觉跟随系统的设计原理和实现方法,最后通过实验验证了系统的稳定性和实用性。
关键词:ROS;移动机器人;视觉跟随系统;目标检测;图像处理1.引言移动机器人技术是近年来快速发展的领域之一,随着无人驾驶汽车、无人机等技术的不断成熟,移动机器人在工业自动化、物流配送、无人零售等领域得到了广泛的应用。
而移动机器人的视觉跟随系统作为其重要的应用场景之一,能够帮助机器人实现对目标物体的自主跟随和导航,在日常生活和工业生产中都具有很大的应用前景。
ROS(Robot Operating System)是一个开源的机器人操作系统,它提供了一套完整的工具和库,能够帮助开发人员快速地构建和部署机器人应用程序。
本文将基于ROS平台,设计一种基于视觉的移动机器人跟随系统,通过机器人搭载的相机传感器采集环境信息,利用图像处理技术实现目标检测和跟随算法,实现机器人对目标物体的识别和跟随。
2.ROS平台简介ROS是一种获取安装说明资源的能力,ROS执行功能从上层到下层层式软件栈,为机器人的自主操作,ROS自动且灵活,且提供丰富的功能,包括硬件抽象,程序库,视觉、键、映射、导航等等,这些功能的整合,让占用资源更好。
3.移动机器人视觉跟随系统设计原理3.1 系统框架设计移动机器人视觉跟随系统的框架设计主要包括以下几个模块:图像采集模块、目标检测模块、运动控制模块和导航规划模块。
图像采集模块负责从机器人搭载的相机传感器中获取环境图像数据;目标检测模块对获取的图像数据进行分析和处理,识别出目标物体的位置和大小;运动控制模块根据目标物体的位置信息,控制机器人实现对目标物体的跟随;导航规划模块负责规划机器人的路径,确保机器人能够安全、高效地跟随目标物体。
机电信息工程基丁ROS的智能制系统陆志勇张占胜沙楠李爽(沈阳化工工程,辽宁沈阳110142)摘要:本课题采用RT1052为核心处理器进行控制,设计完成了一款基于ROS!机器人操作系统)的自主移动智能车控制系统,结合SLAM!同时定位与绘图)技术和路径规划算法,机器人可以在目标点之间自主移动并且可以进行避障,实时定位。
词:ROS;SLAM;控制系统;无线通讯1设计从控分层的角度来看可分为两层,其一是以RT1052机为核心的控制器,也称为底层控制系统;以微脑为核心的,层%层处理系统只负责在接收到上层发来的控制指令以后对机和舵机进行控制%层来自激光雷达和IMU的,然后这些经过一系列的后进行发布,slam_gmapping订阅这些消息进行地图的构建%在进行导航的中用到AMCL进行定位,在move_base节点中进行路径规划,然后发布控制命令消息,我订阅这个消息,当有消息发布时调函数对单片机下发控%在PC端通PID出所的PWM之后,直接将其发送给单片机。
同时我们也未直接使用move_base发布的控,而用订阅的局部规划进,然后做出决策。
2电路设计的硬件部分主要由以下几部分组成:激光雷达、姿、无刷直流电机、舵机!%智件整体结构1所示。
源池供、ROS主控电源电路、单片机电源、雷达电源、舵机电源-等%2所示%串口通达与ROS主控之间的通信,单片机与ROS主控之间的通信两部分%雷达与ROS主控之间的通信采用FT232RL芯片设计USB基金项目:“2019年辽宁省大学生创新创业训练计划”资助项目,项目名称:“基于ROS构建无人智能控制系统”。
'获取姿态衬、加速度信恳幡离图1机构图电池1卜舵机|PWM图2电电电路转串口3所示。
眄卜-----图3雷达与ROS主控串口通信电路单片机与ROS主控之间的通用CH340G芯USB转串口4所示%3控制系统设计软件在ROS机器人操作系统上,添加上激光雷达和IMU的姿的,这样以获得相应周围的和车整体的姿;通过激光雷达可以采集到整体的%将这些采集到的进,通过SLAM的算法对整个;地图进行构建,这样以获得整体的地图,再通规划和导航,就可以控到达到的相应位,系统的整体软件5所示%《湖北农机化》2020年第9期机电信息工程工业控制系统信息安全探究吴界宏(四川轻化工大学,四川 宜宾643002)摘要:本文首先概述了工业控制系统信息安全防 护的重要性;其次分析了当前工业控制系统信息安全 防护现状;最后着重探讨了工业控制系统信息安全防 护对策。
220学术论丛基于ROS的语音控制及特定目标跟随飞行器代政 申剑涛 张堡瑞 张鑫西南科技大学信息工程学院摘要:本文旨在开发出一种基于ROS的语音控制及特定目标跟随飞行器。
该飞行器可以用语音控制它的运动状态,并且可以根据指定目标的形状和颜色进行智能跟随[1-2]。
本系统可以应用在多个方面,比如:危险物品搜索、军事目标检测及监视和车辆监控等方面。
关键词:飞行器;语音控制;目标跟随;ROS0引言随着科技的不断进步,无人机逐渐被应用于很多方面。
包括航空摄像、高空作业和矿井勘测等领域[3-4],但是目前最主要的还是被用于航空拍摄领域。
随着人们需求的不断提高,对无人机功能的要求也越来越高。
一些危险领域的工作也需要无人机来实现。
本文开发一种飞行器可以用语音控制它的运动状态,并且可以根据指定目标的形状和颜色进行智能跟随。
帮助人们解决生活中的难题,提高生活质量。
1 系统结构基于ROS的语音控制及特定目标跟随飞行器的系统框架图如图1所示。
整个系统分为地面控制系统和飞行器端控制系统。
地面控制系统采用树莓派为控制核心,内部用机器人操作系统ROS来运行。
地面控制系统利用LD3320芯片外接麦克风来采集语音信息,将相应的控制信号通过NRF24L01无线传输模块实时的传送到飞行器端,将传感器信息进行融合处理后进行姿态解算,并根据语音控制信号要求,以达到改变飞行器姿态的目的。
飞行器控制端上装有微型摄像头来负责图像的采集,并将采集的图像发给地面系统。
同时对于地面发送来的语音指令进行处理执行和对特定目标的分析和匹配来进行跟随。
2 硬件部分2.1主控器模块和传感器模块设计飞行器端的主控制器选用意法半导体的STM32F103ZET6这款处理器,其内部采用ARM的32位Cortex-M3内核,具有很快的处理速度。
四旋翼飞行器在控制的过程中需要实时的采集姿态信息,本设计采用了采用六轴运动组件MPU6050、三轴数字罗盘HMC5583L传感器来检测四旋翼飞行过程中的姿态信息。
基于ROS的智能交通信号控制系统设计与实现ROS智能交通信号控制系统:设计与实现随着城市化的不断扩张,道路交通问题也日益突出。
交通拥堵、事故频发、空气污染等问题已成为城市发展的制约因素,解决这些问题已成为现代城市化发展的重大任务。
为此,本文基于ROS平台设计并实现了一种智能交通信号控制系统。
一、系统设计1.构建ROS通信架构ROS作为一种通信层,为系统提供了完善的通信机制,可实现不同节点间的信息交换。
本系统通过ROS中的Topic消息机制实现节点间的连接和数据交换。
2.设计节点模块本系统包含三个节点模块:道路监测节点、决策节点、信号灯节点。
道路监测节点负责监测交通流量和车辆状态,并将数据传递给决策节点。
决策节点负责根据监测数据和交通控制算法制定最优的交通控制方案,并将方案传递给信号灯节点。
信号灯节点负责控制信号灯的开关,根据决策节点发来的控制方案进行交通信号控制。
3.交通控制算法设计本系统采用的是基于模糊逻辑的交通控制算法。
该算法根据交通流量和车辆状态等数据制定交通控制方案,利用模糊控制的思想将输入变量和输出变量映射到隶属度函数上,从而实现对信号灯的控制。
二、系统实现1.硬件设备本系统使用了摄像头、单片机、信号灯等硬件设备。
摄像头用于监测道路交通流量和车辆状态,单片机负责采集监测数据并将数据传递给计算机,信号灯则负责控制交通信号灯的开关。
2.软件实现本系统采用了Python语言编写程序,并使用ROS平台进行数据交换。
在程序实现过程中,采用了基于OpenCV的图像处理技术和基于模糊逻辑的交通控制算法。
通过将图像处理结果和交通控制算法结果传递给信号灯节点控制信号灯进行交通流量调整,从而实现对交通信号的智能控制。
三、系统测试为了测试本系统的性能和稳定性,我们在实验室中进行了模拟测试。
测试结果表明,本系统能够稳定运行,并能够根据交通流量和车辆状态等数据制定合理的交通控制方案,从而实现对交通信号的智能控制,达到了预期效果。
《工业控制计算机》2019年第32卷第7期摘要:针对机动车辆平台的远程控制,设计了一款基于ROS 的远程车辆控制和目标跟随系统。
对系统的整体架构进行了说明,并重点描述了基于ROS 设计的通信框架,通过内部的各功能节点实现车辆端的感知、控制、通信功能。
设计了操作人员端的控制界面,并使用UWB 定位模块实现了车辆跟随指定目标的功能。
系统经过测试能够实现预设功能,并具有较高的可移植性。
关键词:远程控制,ROS ,目标跟随Abstract 押A remote vehicle control and target following system based on ROS is designed for remote control of the ve⁃hicle platform in this paper.The overall architecture of the system is described熏and the communication framework designed based on ROS is mainly explained.The perception熏control and communication functions of the vehicle side are realized through the internal functional nodes.The control interface of the operator is designed熏and the function of the vehicle follow⁃ing the specified target is realized with the UWB location module.Keywords 押remote control熏ROS熏target following谢萌张世武(中国科学技术大学工程科学学院精密机械与精密仪器系,安徽合肥230031)李旺房景仕(中国电子科技集团公司第三十八研究所,安徽合肥230088)地面无人车辆的远程控制在军用和民用领域均有着广泛的应用前景。
在军用领域,使用地面无人车辆平台能够有效减少人员和装备损伤,提高后勤保障效率,如负责爆炸装置的定位及引爆的小型排爆机器人[1]。
在民用领域,无人驾驶汽车如特斯拉、无人货仓管理中的(AGV )自动导引运输车,都对提高运输效率、减小事故损失等有着重要作用。
在传统的无人车辆开发中,常采用嵌入式微处理器如STM32等作为核心主控硬件。
但目前对于无人车辆的智能化需求不断提高,从而导致车辆所需要连接的传感器数量增加,数据处理速度需求提高,同时还要求系统有可移植性。
针对这一需求,基于ROS (Robot Operating System 机器人操作系统)开发时间短、可移植性强[2]的特点,设计了一套以ROS 为核心通信架构的车辆主控系统,结合远程操作端软件,实现了车辆的远程控制,并采用UWB (Ultra Wideband 超宽带)定位模块实现了车辆目标跟随功能。
1系统总体设计1.1系统概述与功能为了实现远程控制车辆和目标跟随的功能,需要分别设计无人车辆平台端的主控系统和控制人员端的操作系统。
在无人车辆平台上设计的一套核心主控系统,由研华嵌入式工控机及外围硬件构成,利用CAN 总线与无人车辆平台的运动控制接口通信,同时主控系统通过串口与DDL 图传电台通信,接收控制信号并发送车辆实时状态。
DDL 图传电台与控制人员端电台相互通信,从而实现远程遥控无人车辆平台运动。
在控制人员端设计一套远程控制软件,将电台和便携电脑连接,运行控制界面软件并选择不同的控制模式,最终实现远程控制。
系统现阶段已经实现了三项主要功能。
首先,遥控人员通过控制端无线通信对无人车辆平台进行远程控制,使车辆平台进行启动、停止、前行、倒车、转向等机动动作;其次,遥控人员在控制端操作界面中能够实时获取车辆摄像头采集的图像信息,并监控车辆的实时运行速度、实时方向盘角度、经纬度等信息;最后,遥控人员能够通过操控端选择目标跟随模式,并通过UWB 定位模块解算车辆与跟踪目标间的相对位置,使车辆根据相对位置自动设置车速和转向角度,实现目标跟踪。
图1系统整体架构图1.2系统硬件设计车辆平台侧的核心数据处理系统采用研华MIC-7500工控机。
该型工控机具有很高的数据实时处理性能,同时又具有较多的接口种类和数量,从而连接车辆上安装的各类传感器和通信设备。
工控机的USB 接口与车辆的底层控制器CAN 总线接口、毫米波雷达通过PCAN-USB 分析器转接,使工控机实时收发CAN 总线数据。
组合惯导系统使用北斗星通KY110,系统通过RS232接口向工控机发送车辆的经纬度和姿态角数据。
电台采用华夏盛DDL2350,与主控系统通过串口连接,通过2.304~2.364GHz 无线信号传输车辆和控制端之间的数据,其中与操作端电脑连接的DDL 图传电台设为主站,与工控机连接的DDL 图传电台设为从站。
另外,工控机还连接了VLP-16三维激光雷达及大陆电子ARS408-21毫米波雷达,两者分别将数据实时通过网口与CAN 总线接口发送到工控机,这一设计是为了在之后的开发中实现车辆周边三维地图构建和智能导航。
无人车辆平台远程遥控端在硬件上主要分为三个部分:输基于ROS 的远程车辆控制和目标跟随系统设计Design of Remote Vehicle Control and Target Following System Based onROS 29基于ROS 的远程车辆控制和目标跟随系统设计入设备(遥控器、麦克风、UWB 发射器)、显示设备(主机、显示器)、通讯设备(无线电台)。
其中三种输入设备分别对应三种控制模式(遥控、语音、跟随)。
1.3系统接口设计系统在车辆平台端和远程监控端分别具有输入输出接口,从而实现系统内部的数据传输。
在车辆平台端,输入接口包括组合惯导系统接口,通过RS232接口连接到工控机,输入车辆GPS 坐标和姿态角数据;摄像头接口通过RJ45网线连接到工控机,输入图像数据;电台串口输入电台接收到的控制数据流;CAN 总线接口输入车辆状态数据流。
输出接口包括电台串口,输出经过整合的车辆状态反馈数据流;CAN 总线接口输出经过整合的车辆控制数据流。
在远程监控端,输入接口包括遥控器串口,输入遥控器各硬件通道数值,与无人车辆的控制量对应;电台串口输入车辆状态反馈数据流;语音模块输入语音控制指令;UWB 模块输入跟踪目标与车辆的距离数据。
输出接口为电台串口,输出车辆控制数据流。
图3系统接口示意图2系统软件设计2.1系统工作原理在工控机上搭载Ubuntu16.04系统,底层采用ROS 通信框架,并运行不同的功能节点。
工控机与车辆上的硬件连接后,结合ROS 的硬件抽象描述功能[3],通过功能节点解析对应数据,进行数据解算,将解算后的数据按照通信协议的要求进行整合。
系统中的节点按照功能进行分层设计,划分为感知、控制、通信层[4]。
如果整合后的数据为表示车辆状态的数据,则数据经由电台回传到操作人员端,经过操作软件的解析最终显示在界面中。
如果整合后的数据为控制数据,则数据通过整车的控制端口发送到执行机构,实现车辆控制。
2.2程序架构设计无人车辆平台的软件系统为ROS (机器人操作系统),通过在ROS 中建立各种功能包并通过各包中的节点完成感知、控制和通信三类功能。
图4表示了各个节点(方框表示)与话题(圆框表示)的订阅与发布关系。
图4ROS 程序架构图感知部分包含功能包navigation_function (定位)。
navi⁃gation_function 包含navigation 节点,收集组合惯导信息解算车辆GPS 坐标和姿态,通过navigation_data 话题发布数据。
控制部分包含功能包translate (转换)。
translate 包含translate 节点、carcontrol 节点与carPID 节点。
translate 节点获取cantest 节点的CAN 总线数据和navigation 节点的惯导数据,并将其解算并转化为串口回传协议数据,通过write 话题发送到stateback 节点;carcontrol 节点获取serial_exam⁃ple_node1节点接收的串口数据并进行解算,转化为车辆CAN 协议数据以及控制模式,将控制信号通过serialtocan 话题发送到carPID 节点。
carPID 节点获取carcontrol 节点发出的CAN 协议数据(即设定速度)和控制模式,获取cantest 节点发出的车辆实际速度数据,并采用PID 算法,将车辆的设定速度与实际速度作为输入放入速度环PID ,解算得到车辆加速度,通过can⁃final 话题发送到can 节点。
通信部分包含功能包serial_msgs (串口节点),canfunction (CAN 总线)。
Serial-node 包含serial 节点与stateback 节点,其中serial 节点将物理串口虚拟化,即将串口信息纳入到节点系统中,接收发送串口信息,并通过read 话题转发到carcontrol 节点中;stateback 节点向电台发送串口数据。
canfunction 包含can 节点,将CAN 总线虚拟化,接收和发送CAN 总线信息。
3远程控制端设计3.1人员操作界面设计无人车辆平台的远程控制端需要实现多种控制模式的切换和车辆状态的显示,这首先要求界面上有车辆视野的图像信息显示,车辆的定位信息以及车辆速度转向等常规控制信息的反馈,同时根据所连接的不同硬件选取不同的串口接口。
图5操作界面架构图用于远程控制的控制软件已有基于Web 和云端开发的例子[5-6],但考虑到车辆所处的环境多样性,选择不依赖网络的独立开发方式。
远程控制端的界面使用Python 作为编程语言,利用PyQtGUI 库和PyCharm 工具进行开发。
首先根据设计需求图2无人车辆平台实机结构30《工业控制计算机》2019年第32卷第7期(上接第28页)成人为故障并使故障扩大化。
7.4分析法分析法通常需同观察法和测试法配合使用,需借助观察到的结果和测量的数据,并查阅相关文件资料,从设备组成逻辑与工作原理着手,从故障表现的部位开始,层层编制故障树,并对每个可能产生该故障的原因进行分析,根据观察或测量的结果分配各原因出现的概率,并可根据概率大小再次采用观察、测量或替换验证分析结果,从而完成故障排查。
7.5试错法与概率性问题遇到故障,我们首先要求要做的是保护现场,因为有些故障出现是有概率性的,现场破坏后故障再也出现不了,莫名其妙的故障消失,并不表示故障被根本排除,侥幸会给后期工作埋下隐患。