结构动力学-8
- 格式:ppt
- 大小:550.00 KB
- 文档页数:16

第一章概述1.动力荷载类型:根据何在是否随时间变化,或随时间变化速率的不同,荷载分为静荷载和动荷载根据荷载是否已预先确定,动荷载可以分为两类:确定性(非随机)荷载和非确定性(随机)荷载。
确定性荷载是荷载随时间的变化规律已预先确定,是完全已知的时间过程;非确定性荷载是荷载随时间变化的规律预先不可以确定,是一种随机过程。
根据荷载随时间的变化规律,动荷载可以分为两类:周期荷载和非周期荷载。
根据结构对不同荷载的反应特点或采用的动力分析方法不同,周期荷载分为简谐荷载(机器转动引起的不平衡力)和非简谐周期荷载(螺旋桨产生的推力);非周期荷载分为冲击荷载(爆炸引起的冲击波)和一般任意荷载(地震引起的地震动)。
2.结构动力学与静力学的主要区别:惯性力的出现或者说考虑惯性力的影响3.结构动力学计算的特点:①动力反应要计算全部时间点上的一系列解,比静力问题复杂且要消耗更多的计算时间②于静力问题相比,由于动力反应中结构的位置随时间迅速变化,从而产生惯性力,惯性力对结构的反应又产生重要的影响4.结构离散化方法:将无限自由度问题转化为有限自由度问题集中质量法:是结构分析中最常用的处理方法,把连续分布的质量集中到质点,采用真实的物理量,具有直接直观的优点。
广义坐标法:广义坐标是形函数的幅值,有时没有明确的物理意义,但是比较方便快捷。
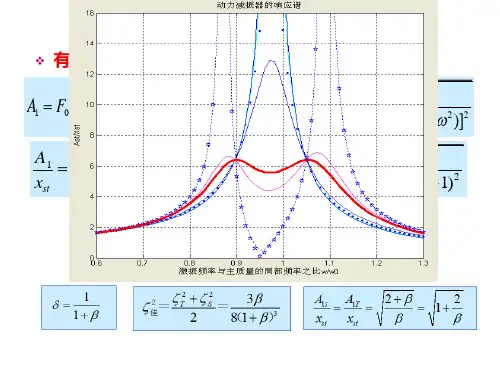
有限元法:综合了集中质量法与广义坐标法的特点,是广义坐标的一种特殊应用,形函数是针对整个结构定义的;有限元采用具有明确物理意义的参数作为广义坐标,形函数是定义在分片区域的。
①与广义坐标法相似,有限元法采用了形函数的概念,但不同于广义坐标法在全部体系(结构)上插值(即定义形函数),而是采用了分片的插值(即定义分片形函数),因此形函数的公式(形状)可以相对简单。
②与集中质量法相比,有限元法中的广义坐标也采用了真实的物理量,具有直接直观的优点。
5.结构的动力特性:自振频率、振型、阻尼第二章分析动力学基础及运动方程的建立1.广义坐标:能决定质点系几何位置的彼此独立的量;必须是相互独立的参数2.约束:对非自由系各质点的位置和速度所加的几何或运动学的限制;(从几何或运动学方面限制质点运动的设施)3.结构动力自由度,与静力自由度的区别:结构中质量位置、运动的描述动力自由度:结构体系在任意瞬间的一切可能的变形中,决定全部质量位置所需要的独立参数的数目静力自由度:是指确定体系在空间中的位置所需要的独立参数的数目为了数学处理上的简单,人为在建立体系的简化模型时忽略了一些对惯性影响不大的因素确定结构动力自由度的方法:外加约束固定各质点,使体系所有质点均被固定所必需的最少外加约束的数目就等于其自由度4.有势力的概念与性质:有势力(保守力):每一个力的大小和方向只决定于体系所有各质点的位置,体系从某一位置到另一位置所做的功只决定于质点的始末位置,而与各质点的运动路径无关。
第八章结构的动力学模型修正§8.1 概述随着科学技术的进步,人们对工程结构设计的要求越来越高,因此在进行结构静、动力分析时,要求反映结构力学特征的模型正确可靠,就成为顺理成章的事,结构建模问题因而显得越来越重要。
对结构振动分析而言,一个良好的数学模型是保证固有特性和振动响应计算、载荷预计、稳定性分析等得到可靠结果的前提。
上一世纪中期发展起来的有限元素法,为结构动力学建模提供了一个有力的手段。
但由于各种原因,根据结构的力学模型用有限元素法建立的数学模型,常常不能准确反映实际结构的动力学特征。
虽然在后来随着振动测试技术、信号处理技术的发展,使得以参数识别技术为基础的试验模态方法获得了大的发展,但由于参数识别也是以参数模型存在为前提条件,如果参数模型本身不能反映结构的本质与特征,则再好的数学识别技术也不能提高结构模型的精度。
而且由参数识别得到的模态数据,往往远少于建模的需要。
结构的动力学建模仍然有许多需要解决的问题。
要得到一个与实际结构动力学特性符合较好的模型,可以从两个途径来解决这个问题:一个途径是用理论分析(如有限元素法)建立模型,再用实测数据进行模型修正,称为结构动态修改或动力学模型修正;另一个途径是仅用测试数据,以参数模型为依据求得物理坐标下表征结构动态特性的质量、刚度、阻尼矩阵,即所谓物理参数识别问题。
因此,结构动力学模型修正的工程含义可以从两方面来阐述:(1)计算模型的动力学模型修正。
对于实际结构运用有限元法建立的数学模型,由于它不能准确反映实际结构的动态特性,需用实测数据进行修正,以获得能用于计算的数学模型。
(2)结构的动力学修改。
结构动力学修改的正问题是指:对已有结构做了局部修改后,在原结构模态参数已知的情况下,用快速简易的方法获得改动后结构的模态参数。
即所谓结构重分析问题。
结构动力学修正的反问题是指:已知的原结构模态参数不符合要求,在对结构模态参数的要求已给定的情况下,对结构进行修改,使改动后的结构模态参数符合要求。
机械振动系统,师汉民,华中科技大学出版社cos sin i t e t i t ωωω=+Ch1 单自由度线性系统自由振动1.3 无阻尼自由振动()()0mxt kx t += 解()()22002()cos sin cos cos n n n n nnv v x t x t t x t A t ωωωϕωϕωω=+=++=-振幅和相位由初始条件确定。
确定自然频率的方法: 1、 静变形法:kx mg =,n g xω=2、 能量法:无阻尼弹性振动能量守恒,因此取动能Tmax=势能Vmax 。
1.4 有阻尼自由振动22()()()020n n mx t cx t kx t s s ξωω++=⇒++= ,通解wt Ae通常自然频率可以很容易的通过实验测定,但阻尼比ξ的计算或辨识则比较困难,需要利用自由振动衰减曲线计算。
在间隔1个振动周期T 的自由振动减幅振动曲线上,取两个峰值A1和A2,A1/A2=EXP(ξωn T)Ch2 单自由度线性系统的受迫振动 2.1 谐波激励()()()cos cos mxt cx t kx t F t kA t ωω++= →22()2()()cos n n n x t x t x t A t ξωωωω++= ,设通解cos()X t ωϕ-,ϕ表响应对激励的滞后通解X1为:()20020002cos n t n n d dd v x v x xe t ξωξωξωωωω-+⎛⎫++- ⎪⎝⎭,瞬态响应,逐步衰减。
特解X2为:()()i t H Ae ωϕω-,稳态响应,实际上的激励和响应仅取实部,响应的频率是激励的频率!222222222222cos arctan cos arctan 112112n n n n n n n n AA t t i ωωξξωωωωωωωωωωξξωωωωωω⎛⎫⎛⎫⎪⎪ ⎪ ⎪-=- ⎪⎪⎛⎫⎛⎫--+- ⎪ ⎪-+ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭幅频特性221()12n n X H Ai ωωωξωω==-+,相频特性222()arctan1n nωξωϕωωω=-若激励表示为i t Ae ω,响应表示为i t Xe ω,可表述()()()x t H f t ω=,则()()()i t x t H Ae ωϕω-=共振频率212r n ωωξ=-,有阻尼自然频率21d n ωωξ=-,因此,对共振的研究应考虑阻尼比ξ=0.707的特殊点。