基于PSD的位移测试装置设计
- 格式:doc
- 大小:497.50 KB
- 文档页数:13
浅谈基于PSD的微位移测量系统研究作者:卢珺来源:《科学与财富》2020年第30期摘要:微位移测量系统主要在对物体进行跟踪操作中有广泛应用,为了可以提高激光跟踪设备的跟踪速度和精准度,就需对设备性能进行改善。
按照测量光斑在PSD上的坐标可以对测量系统进行整改优化,并设计出了一种由PSD传感器和模数转换器以及数字信号处理器所组合而成的高质量微位移测量系统。
本文就对该本文就对基于PSD的微位移测量系统进行分析,供参考。
关键词:PSD;微位移测量;系统引言:激光跟踪设备是在精准测量和激光干涉测量的基础上所研发出来的一种测量系统,在实际的运行中,通过测量光束照射在目标上,再经反射折回到跟踪设备上来实现运行。
当目标移动的时候,跟棕设备也会对光束进行调整,从而再次对准目标。
在这个过程中,设备是否可以对目标进行准确的跟踪,和设备的速度和精度有着密切联系。
跟踪控制系统是则是将PSD 作为检测单元,按照检测单元的目标脱离信息来进行有效的跟踪,PSD在我国已经有了广泛的应用和研究。
1.相关关键器件的选择1.1PSD选择PSD是一种非分割型的光电二极管,PSD一般是由三个层次组合而成的的,第一层是感光面,这一层次主要是输出电极;第二个层次是对转换效率进行提取;另外一个层次是公共电极,主要用于加反偏电压,两个电极之间会夹杂一个负载电阻。
当光束照映射在光敏面某一个点的时候,就会有电流进入感光面的电阻中,并从感光面的四个电极中输出不同的光电流坐标。
[1]一般,都会将坐标的核心点选在PSD的几何中心上,按照输出的光电流来选择光斑坐标。
1.2模数转换器选择为了可以准确的对光斑移动位置信息进行获取,就需要在使用PSP的同时选择适合的模数转换器,模数转换器需要满足速度快、效率高的要求,并且,为了确保A/D转换的快速完成,模数转换器的转换率必须要比采样的速度快。
所以,本文在综合考虑的前提下,选择考虑ADS8556作为模数转换器。
ADS8556模数转换器的采样速度可以达到630千次每秒,转换的时间只需要1.2六微秒,转换的效率大约为793千次每秒,要比采样速度和效率高,完全可以满足微位移测量系统要求。
基于PSD的微小位移测量系统的设计作者:尹茜来源:《青年文学家》2011年第09期摘要:随着科技的发展,许多的控制系统中需要自动识别微小位移。
本文就是以光电位置敏感传感器PSD(Posnion Sensnive Detector)为核心来实现微小位移测量的。
PSD传感器是一种对其感光面上入射光斑重心位置敏感的光电器件。
即当入射光斑落在器件感光面的不同位置时,PSD将对应输出不同的电信号。
发射红外光到被测点,遇测量表面反射的光由PSD接收,再经过滤波、放大及AVR系列单片机ATMEGAl 6微控制单元处理,最后显示出测量的结果。
关键词:微小位移测量光电位置敏感传感器微控制单元高新技术产业逐渐向技术密集型发展,测量技术所面临的问题也越来越复杂。
这就使原有静态、接触式测量的方法受到了较大的限制。
对于测量过程我们需要向动态、非接触式测量的方向发展。
这样不但提高了系统的测量精度,并且使测量更加的方便,同时能够不破损元器件,能够测量一些有毒或者不能进行接触的元器件,大大提高了测量范围。
近些年来,随着半导体技术的高速发展,制造出来的PSD性能得到了较大的提高,分辨率大大提高,同时PSD的有限性度和稳定度也有很大的改善。
PSD在国内的研究发展也很快,相关资料也已经比较安全。
PSD在工业检测中主要用于被测器件的位移测量、尺寸测量和表面形状测量等。
整体电路设计如下图所示:按键和PSD的信息输入单片机内,由单片机处理后再由显示器输出。
1、PSD和发光管及其放大电路红外线发射光,照射在测量面上,所反射的光被PSD接收。
PSD依据入射光在接收面的重心不同,即由平面的高度不同而引起入射光在接收面的重心不同,每次两个引脚输出的电流也不同,我们称它为11和12。
PSD两极输出的只是光电流11和12,要想得到位置输出信号必须要有相应的信号处理电路的支持。
下面介绍PSD传感器信号处理电路原理。
低通滤波放大电路,滤波电路的功能是让指定频段的信号通过,而将其余频段上的信号加以抑制或使其急剧衰减。
基于PSD高精度激光位移传感器的设计摘要:介绍了PSD器件的工作原理,对基于三角法测量原理的传感器主要结构参数进行了分析,给出了设计的传感器外形。
并设计一种含有多种放大倍数的PSD的检测电路,可实现测量中对环境变化的自适应能力。
最后分析了影响传感器测量精度的各种因素,并讨论了消除的方法。
关键词:高精度位移传感器;位位置敏感器件(PSD);激光三角法;发大电路Design and Analysis of High Precision Laser Displacement Sensor Based on Position SensitiveDetector(PSD)Abstract:The operating principle of PSD was introduced briefly.Configuration parameters of laser triangulation sensor were analyzed.The PSD detection circuit with a variety of manifications was designed to achieve the ability of self –adapting .Finally, the variou factors of influencing sensor measurement accuracy and elimination methods were analyzed and discussed.Key words: high precision displacement sensor; position sensitive detector(PSD); laser triangulation ;amplification circut目录1 绪论 (4)2 PSD工作原理及特点 (4)3 结构原理及主要参数分析 (6)3.1结构原理 (6)3.2参数β (7)3.3透镜位置参数s/和s (7)3.4 PSD的倾角α的确定 (8)4 PSD检测电路的设计 (8)4.1信号检测与处理系统方案 (9)4.2前置放大电路 (9)4.2.1前置电路 (10)4.2.2 放大器的选择 (12)4.2.3前置放大电路设计 (12)4.3数据采集电路 (13)4.3.1A/D转换器的选择 (13)4.3.2A/D转换器的数据采集 (14)4.3.3 A/D转换器与单片机的接口 (16)4.4 MCU接口电路与计算、控制程序 (16)4.4.1 MCU选择 (16)4.4.2 MCU接口电路 (18)4.4.3 MCU计算与控制程序 (20)4 激光测距传感器应用于工业检测的若干问题 (25)5 影响传感器测量精度的因素及消除方法 (26)6 结论 (27)1 绪论基于PSD的激光位移传感器主要应用在高灵敏度、高精度的位移、角度、同轴度的非接触测量与校准领域。
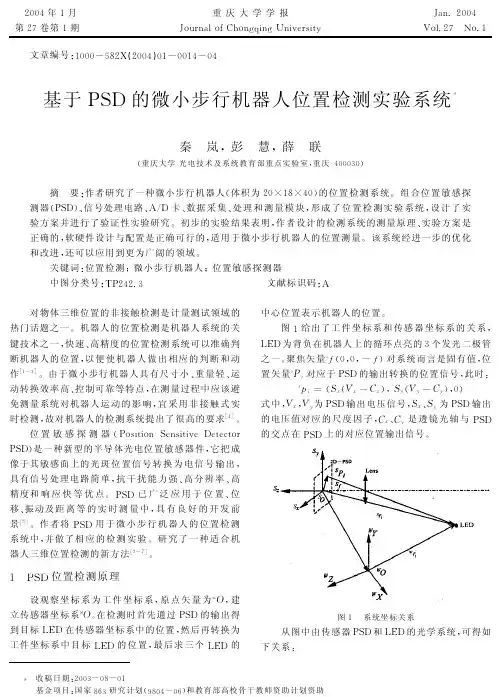
2004年1月重庆大学学报Jan.2004第27卷第1期JOur nal Of ChOn gg i n g Uni versit y VOl.27NO.1文章编号!1000-582X"2004#01-0014-04基于PSD的微小步行机器人位置检测实验系统%秦岚9彭慧9薛联(重庆大学光电技术及系统教育部重点实验室9重庆400030)摘要!作者研究了一种微小步行机器人(体积为20X18X40)的位置检测系统O组合位置敏感探测器(PSD)信号处理电路A D卡数据采集处理和测量模块9形成了位置检测实验系统9设计了实验方案并进行了验证性实验研究O初步的实验结果表明9作者设计的检测系统的测量原理实验方案是正确的9软硬件设计与配置是正确可行的9适用于微小步行机器人的位置测量O该系统经进一步的优化和改进9还可以应用到更为广阔的领域O关键词!位置检测微小步行机器人位置敏感探测器中图分类号!P242.3文献标识码!A对物体三维位置的非接触检测是计量测试领域的热门话题之一机器人的位置检测是机器人系统的关键技术之一快速~高精度的位置检测系统可以准确判断机器人的位置以便使机器人做出相应的判断和动作1-3]由于微小步行机器人具有尺寸小~重量轻~运动转换效率高~控制可靠等特点在测量过程中应该避免测量系统对机器人运动的影响宜采用非接触式实时检测故对机器人的检测系统提出了很高的要求4]位置敏感探测器<POsiti On Sensiti ve D et ect Or PSD>是一种新型的半导体光电位置敏感器件它把成像于其敏感面上的光斑位置信号转换为电信号输出具有信号处理电路简单抗干扰能力强~高分辨率~高精度和响应快等优点PSD已广泛应用于位置~位移~振动及距离等的实时测量中具有良好的开发前景5]作者将PSD用于微小步行机器人的位置检测系统中并做了相应的检测实验研究了一种适合机器人三维位置检测的新方法5-7]1PSD位置检测原理设观察坐标系为工件坐标系原点矢量为L O建立传感器坐标系S O在检测时首先通过PSD的输出得到目标LED在传感器坐标系中的位置然后再转换为工件坐标系中目标LED的位置最后求三个LED的中心位置表示机器人的位置图1给出了工件坐标系和传感器坐标系的关系LED为背负在机器人上的循环点亮的3个发光二极管之一聚焦矢量s f<00-f>对系统而言是固有值位置矢量s Pi对应于PSD的输出转换的位置信号此时:s1i=<S J<V J-C J>SN<VN-C N>0>式中VJ V N为PSD输出电压信号SJ~SN为PSD输出的电压值对应的尺度因子CJ~CN是透镜光轴与PSD 的交点在PSD上的对应位置输出信号图1系统坐标关系从图中由传感器PSD和LED的光学系统可得如下关系:%收稿日期!2003-08-01基金项目!国家863研究计划<9804-06>和教育部高校骨干教师资助计划资助s i = is f -s 1i s1i 2 设传感器坐标系到工件坐标系的位移矢量为L O J 0 N 0 0 从传感器坐标系到工件坐标系的旋转变换矩阵为L s L s 用欧拉角 B v 表示为 1Ls = J % % Z =cOs B cOs v-cOs B sin vsin B sin B sin cOs v cOs sin v-sin B sinsin v cOs cOs v -cOs B sin -sin B cOscOs v sin sin v sin B cOs sin v sin cOs v cOs B cOs (L 1J 3这样 在工件坐标系中LED 的位置矢量L i 可以表示如下L i =L O L s si4 在 1 2 4 式中 未知的测量参数是J 0 N 0 0Bv S J S N C J C N 和 i 在工件坐标系中的位置矢量L i 适用于5个LED 是已知的1 2 4 式组成15元非线性联立方程组 通过求解可求得旋转矩阵和平移矩阵在求解出旋转矩阵和平移矩阵以后 也就确定了工件坐标系与传感器坐标系的相对关系 对于式 2 中的 i 值 当作为目标的3个LED 相对于前一位置没有Z 方向的位移时 i 可以看作常数 但是 从光学系统可知 当目标LED 的Z 轴发生变化时 i 值是变化的 所以在进行位置检测时 当目标LED 有Z 方向的位移时 需要重新计算 i 值图2表示工件坐标系和安装在机器人上的3个LED 之间的关系 用机器人上任意一点;的三维坐标表示机器人的三维位置 从传感器坐标系看见的位置矢量si i =1 2 3 分别由对应于3个LED 的PSD 输出s P i 通过 2 式表示 在 2 式中 未知数是 ii =1 2 3用3个已知相对位置的LED 点来计算 i 如图2L 1-L2=L5L 3-L2=W6 L 1-L 3=L 2 W 2 1 27 L W 是LED 点之间的距离所以把 2 4 式代入 5 6 和 7 式 得到三元非线性联立方程组 解这个方程组 求得未知数 i再由 4 式求出L i 最后用3个LED 点的Li 矢量来求解代表机器人点;的矢量W 12PSD 位置检测实验系统如图3所示 位置检测系统由如下单元构成 作为目标物固定在微小步行机器人上的发光二极管 循环点亮发光二极管的点亮电路 用来会聚发光二极管光束的透镜 获取发光二极管信息的二维PSD 处理PSD 信号的数据处理卡 进行数据采集的A D 转换卡 作为检测系统计算和人机交互接口的计算机 软件将采集到的三个光点位置信息计算出微小步行机器人的位置图3PSD 检测系统框图位置检测系统是通过检测机器人上背负的3个LED 的位置得到目标物的三维空间位置的 作者用一精密加工的平板上已知孔距的精密孔来代替机器人的移动 把LED 光点置于这些精密孔中模拟机器人的运动图4是检测系统实物图 LED 平板 透镜和PSD 用三个基座支撑 基座可以在导轨上移动 整个系统搭建在一个三角导轨上 透镜支座可以在垂直和水平方向移动 LED 可以位于平板上任意的孔 用改变LED 在平板上的位置来代替待测物的移动图4基于PSD 的位置检测系统测量平板上的每个点的位置 并与理论值作比较 得出系统的检测误差 表1是误差数据 经过多次实验 在X 平面内误差在0.34mm 内 在Z 平面误差51第27卷第1期秦岚等!基于PSD 的微小步行机器人位置检测实验系统表1测量误差坐标X Z 最大误差值mm0.31930.33352.5724实验结果说明在130X130的平面内测量精度大于0.34mm Z的误差较大与采集读数有关当LED在Z 方向变化时PSD输出的变化很小需要准确读数当读数不准时会有较大误差产生以上的实验通过检测模拟机器人运动的LED来给出测量精度大量的实验验证了检测原理的正确性可行性和实用性可以用于机器人的三维位置检测3结论作者研究了一种基于单片二维PSD检测物体三维空间位置的三点测量新方法将PSD传感器PSD 信号处理电路A D转换卡计算机LED点亮控制电路和电源组成为位置检测实验系统采用C++Buil d-er5和M at Lab5.3编制了检测软件实验结果验证了所研究的检测方法的正确性和实用性可以实现微小步行机器人三维位置检测也可以用于其他物体的三维位置测量从而为检测物体的三维位置提供了一种新颖的检测方法和系统参考文献!1铃木基之山田阳滋山田缝夫等.自走式小型ロポツトの位置计测制御に关する研究J.第10回日本ロポツト学会学术讲演会予稿集1992183.2R I MER W.A ct uat Or f Or M icr O RObOts A.Pr OcI EEE Int COnf ROb Aut O m198931547.3FEUS ELL A KRUSE MARK MULLER J.Nu m eri calsi mulati On and O p ti m iZati On Of p l anar el ectr O m a g netic act uat Ors J.S ensOrs and A ct uat Ors1998A70276-282.4方秋华田新启孙定.光电位置灵敏探测器及其应用J.东南大学学报199525552-57.5彭慧.基于PSD的三维位置检测新方法D.重庆重庆大学2003.6PENG~U I Z~ANGZ~I~A I I NLAN.3D POsiti On M easure m ent Of a W all-cli mbi n g M icr O RObOt A.Pr O-ceedi n g Of t he Inter nati Onal S y m p Osi u m On Precisi On M e-chanical m easure m ents I SP MM2002.7张智海蔡秀梅秦岚.微型机器人三维位置测量的新方法J.压电与声光200123增刊413-415.Pos iti on D etecti on Ex P eri m ent S y ste m ofa M icro-wal ki n g Robot Based on a PSDO I N Lon PEN G hui XUE Li onKe y LabOrat Or y Of p t Oel ectr Oni c echnOl O gy S y st e m under t he S t at e M i ni str y Of Educati OnChOn gg i n g Uni versit y ChOn gg i n g400030Chi naAbstract A p Ositi On det ecti On s y st e m Of a Wal k m i cr O-r ObOt Whi ch si Ze i s Onl y20mm X18mm X40mm has been st udi ed.he PSD p Ositi On det ecti On s y st e mi s desi g ned.PSD det ect Or PSD si g nal p r Ocessi n g circuit A D cO m p ut er and p O Wer su pp l y are i nt e g rat ed i nt O an eX p eri m ent det ecti On s y st e m.COntr Ol sOf t Ware Was p r O-g ra mm i n g W it h C++Buil der5.0I ncl udi n g dat a cOll ecti On mOdul e dat a p r Ocessi n g mOdul e and dat a di s p l a y mOdul e.he eX p eri m ent has verifi ed t he m easure m ent p ri nci p al and t he s y st e m Of p Ositi On det ecti On W it h PSD sensOr i s accurat e.he sOf t Ware i s eXactit ude and cOO p erat es W it h har d Ware Well.A f t er bett er m ent t he p Ositi On det ecti On s y st e m can be used i n vari Ous fi el ds.Ke y words p Ositi On det ecti On m i cr O-Wal ki n g r ObOt p Ositi On sensiti ve det ect Or PSD!编辑张小强"61重庆大学学报2004年。
基于PSD 的薄膜增强古斯—汉欣位移测试系统研究摘要当光从光密媒质入射到光疏媒质界面发生全发射时,由于消失波的特点便产生古斯-汉欣位移。
例如,假定媒质1中有一个光束以入射角0θ向两媒质组成的界面入射,而界面两侧的媒质折射率为)(2121n n n n >、,入射角大于临界角即12110sin n n c -=>θθ;那么几何光学预期将发生金反射。
但在实际上,光束进入了媒质2并在与界面平行方向前行一段距离,然后才返回媒质1。
这段距离就是古斯—汉欣位移。
在单界面的全反射和双棱镜结构的受抑圈内反射中,古斯-汉欣位移量只能达到波长的量级,在实验中很难对其进行探测。
如果在折射率较高的电介质基层底上镀一层折射率较低的电介质薄膜,并且恰当选择基底内光束的入射角,使得光束在基底—介质膜界面上折射到薄膜内、在薄膜—空气界面上全反射,那么反射光束的古斯—汉欣位移在一定条件上会得到共振增强。
本论文基于玻璃棱镜/电介质薄膜/光疏介质结构的特点,从理论和方法上重点研究了在单反射情况下利用电介质薄膜增强古斯-汉欣位移。
采用PSD 技术直接地测量了这种古斯—汉欣位移随随电介质薄膜厚度的变化,测量结果与理论预言吻合得较好。
关键词:古斯—汉欣位移 电介质薄膜 PSDAbstract :It happened to produce the Goos-Hanchen shift because of the wave of the characteristics vanish ,When light from dense medium light incident to light hydrophobic medium interface .For example ,if a beam of light hits an interface between two mediums with indices of refraction 21n n >under an angle 12110sin n n c -=>θθ,geometrical optics predicts total reflection of the incoming beam . But in reality ,the beam pentrates into the second medium and travels for some distance parallel to the interface beforebeing scattered back into the first medium .This is the Goos-Hanchen shift .The Goos-Hanchen (GH) shift that occurs in single-interface reflection and the frustrate-total-internal reflection is only of the order of the wavelength . The Goos-Hanchen shift of reflected beam is resonance enhanced under some conditions when the incident beam transmits from the high-refractive index prism to the low-refractive index dielectric thin-film and is totally reflected from the film-air interface .In this paper,we based on the glass prism/dielectric film/light hydrophobic medium structure characteristics, from theory and method in the research on the key shoot cases using dielectric film enhance the Goos-hanchen shift .The GH shift versus the fiIm thickness is directly measured by PSD technology.The experimental measurements confirm the theoretical prediction .Keyword : Goos-hanchen shift Thin-film /dielectric PSD1 绪论1.1 研究的目的和意义光束在光密介质与光疏介质的界面上发生全反射时,反射光束相对于几何反射光束而言,会在入射面内产生一段侧向位移,这一现象是由Goos和Hänchen于1947年在实验中证实的,通常称为GH位移。
第 3 期2023 年 6月NO.3Jun .2023水利信息化Water Resources Informatization0 引言水利工程是中国经济发展的重要依托,是国家基础设施的重要组成部分,在防洪安全、水资源利用、生态环境保护等方面发挥了重要作用[1]。
但由于受运行时间增长、建设时缺陷、环境变迁、运行不当等因素的影响,水利工程潜在危险性也在不断上升[2]。
水利工程安全问题关系着人民的生活,可能给人民生命和财产带来威胁,造成巨大的损失,所以对水利工程进行安全监测和准确估计显得十分重要[3]。
而安全监测中变形监测直接反映水利工程运行的安全状态,因此需要检测水利工程变形情况,确定工程变形是否在安全范围内。
目前,变形监测主要采用垂线坐标仪、引张线仪、静力水准仪等进行自动化测量[4],这些仪器在应用中存在光源干扰严重、测量时间长、温度影响大等缺点。
PSD (光电位置传感器)作为新型传感器,位置分辨力高达 1μm ,响应时间短达 5μs ,光谱响应范围广达 380~1 100 nm ,且信号处理简单,可连续探测光点位置[5]。
为此,根据 PSD 的特点,设计基于 PSD 的水利工程变形监测系统,用于水利工程的变形监测。
该系统先对 PSD 输出的微信号进行信号放大、滤波与数模转换,再利用 STC89C52 单片机结合外围电路进行 PSD 信号处理,最后把计算后的位置坐标显示在上位机上,从而方便监测人员对变形位置的计算与观察。
1 变形监测系统设计PSD 是一种基于横向光电效应的光电位置传感器,本研究监测光点水平和垂直方向坐标,选用二维PSD ,以最常用的枕形 PSD 介绍工作原理[6-7]。
PSD 一般为 PIN 3 层结构,从 PSD 光表面的 4 个对角引出输出电流电极,当一束激光射在 PSD 光敏面时[8],光点位置产生与光能量成正比的光电荷。
在公共端加上反偏电压,这种电荷通过电阻层在光表面上扩散到 4 个电极,光点到各电极的距离与输出电流成反比[9]。
文章编号:1671-637Ú(2007)06-0186-03采用PSD的激光平台测量仪的设计张金根,刘志勤,衣彬,伏艳(第二炮兵工程学院指挥自动化系,西安710025)摘要:针对传统的测量小角度、小位移的工具所存在的体积大、功耗大、成本高、操作复杂、测量精度难以保证等缺陷,设计了一种采用PSD作为主测量器件,ADS7825作为A P D转换器件, LPC2214作为核心控制器件的激光平台测量系统。
经过严格的测试表明,该系统能够达到较高的测量精度,大幅度降低了成本,体积、功耗都比较小,同时操作简单。
关键词:激光平台测量仪;位置敏感探测器;角位移中图分类号:V241.4文献标识码:ADesign of a laser-measurer of platformbased on position sensitive detectorZHANG Jin-gen,LI U Zhi-qin,YI Bin,FU Yan(T he Second Artillery Engineering Institute,Xi.an710025,China)Abstract:Traditional instruments for small-angle,small-displacement measurment always have some disad-vantages of large volume and power c onsumption,high cost,complex operation and uncontrollable metrical precision.To overcome the disadvantages,we designed a laser-measurer of platform.In this system,a Pos-i tion Sensitive Detector(PSD)was used as the main metrical parts,ADS7825was used as A P D converter, LPC2214was used as laser platform measure ment system for the kernel controller.Rigorous tests showed that the syste m can gain a high measurement precision with reduced cost,volume and power consumption,and can be operated easily.Key words:laser-measurer of platform;Position Sensitive Detec tor(PSD);angle-displacement0引言随着科学技术的进步,在工业和军事应用场合,对于角度、水平度的测量定位精度要求越来越高,传统的工具虽然也能得到较高的测量精度,但是其体积、功耗都比较大,成本过高,而位置敏感探测器PSD作为新型位置传感器,是一种基于半导体PN结横向光电效应、能够测量光斑在探测器表面连续的新型光学器件。
基于PSD的姿态零位探测系统的设计彭伟【摘要】本文根据PSD(Position Sensitive Detector)的工作原理和特性[1],利用由运放芯片OP27GS和模数转换芯片AD7734等电子器件构成的IV转换和多级放大电路,实现了对光斑位置信号的转换、放大和采集等处理,完成了光斑位置检测模块的设计[2][3][4].根据光学原理,将分光镜(BS016)、透镜、角锥、平面反射镜等光学器件搭建成的光学平台,配合光斑位置检测模块,通过切换机械快门的闭合状态对被测物相对基准物的偏角进行测量[5].将采集到的多轴偏角数据上传给上位机,解算其当前姿态.若与预期有偏差,则由系统根据所得数据进行必要的微调,实现零位姿态的探测与校正.【期刊名称】《黑龙江科技信息》【年(卷),期】2018(000)033【总页数】2页(P28-29)【关键词】PSD;光斑;位置;检测;零位【作者】彭伟【作者单位】哈尔滨超精密装备工程技术中心有限公司,黑龙江哈尔滨 150080【正文语种】中文【中图分类】TP274+.51 概述PSD(Position Sensitive Detector),是一种利用光电效应提取光斑在探测器光敏面上相对位置的传感器。
与传统式的CCD传感器相比,其具有光谱响应范围宽、分辨率高、定位精度高、解算速度快等优点,被广泛应用于激光准直、激光跟踪、光斑位置检测等领域。
本文设计的基于PSD的姿态零位探测系统可以有效监测被测面相对于基准面的偏角,从而实现对其姿态的探测。
2 系统工作原理经过综合考虑,本文最终选用了日本滨松公司的S5991-01型PSD作为光敏元件。
其有效感光面积为9×9mm,光谱响应范围为320-1100nm,光灵敏度为0.6A/W,可以满足本设计的需求。
本文设计的基于PSD的姿态零位探测系统中,PSD将接收到的光信号转换为电流信号,经过IV转换、滤波、运算放大以及AD模块采集等处理电路后,将数字信号发送给单片机进行解算,得到当前的光斑位置。
1 绪论1.1 引言科学技术研究的过程可以说是测量、处理、改进的过程,而测量的目的就是要获取研究对象的各种信息,以便根据所得到的信息控制研究对象。
随着工业技术的不断发展,各行各业对测试的要求也越来越高,并称测试技术提出了非接触化、小型化、集成化、数字化、智能化等各种要求。
为了设计出高质量的产品,不仅需要良好的设计,而且还需要对生产出的产品进行测试,看是否满足设计要求。
在己经具备良好设计的基础上,提高在测试方面的水平就成为新的要求。
测试技术不仅能为产品的质量和性能提供客观的评价,为生产技术的合理改进提供基础数据,而且是进行一切探索性的、开发性的、创造性的和原始的科学发现或技术发明的技术手段。
现代测试技术的一个明显的特点是采用电测法,这首先要将输入的物理量转换成电量,然后进行必要的调节、转换、运算、处理,最后以适当的形式输出。
非电量电测技术己越来越广泛的应用于各种工程领域和各种工作之中。
兵器技术的发展更离不开测试技术,或者可以说,测试技术是兵器发展的前提和基础。
任何一种兵器从设计到定型到装备部队,都要经过若干环节的试验,从零部件试验到总体试验,从地面静止试验到飞行打靶试验,从模拟实验到实践实验等等,只有经过严格的科学试验,最终测量得到的各项性能指标达到战术技术的要求,才能装备部队投入使用。
[1]在测试中,位移是一种常见的物理量,是线位移和角位移的总称。
位移的测量在机械工程中应用很广,工作中经常要求精确测量出零部件的位移或位置。
而在对力、压力、流量、扭矩、速度、加速度等参数进行测试的过程中,传感器的设计一般要以位移为中心变量进行转换。
在技术领域,要求对位移测试的精度越来越高,以适应现代技术的发展。
由此可见位移测试在测试领域的重要性。
1.2 自动机测试概述枪械中的自动机部件是自动武器的核心部分,是自动枪械发射时完成自动循环的各机构和装置的总称,包括闭锁机构、供弹机构、击发机构、退壳机构、复进装置、发射机构、保险机构等等。

psd位置传感器测量的原理和方法【原创版4篇】目录(篇1)I.psd位置传感器测量的原理II.psd位置传感器测量的方法III.psd位置传感器测量的应用正文(篇1)一、psd位置传感器测量的原理psd位置传感器是一种利用电感位移变化测量物体位置的设备。
当物体移动时,它改变了传感器内的电感值。
这种变化被转换为电压或电流信号,然后通过数字信号处理进行读取和处理。
psd位置传感器通常由两个线圈和一个可移动的金属物体组成,当物体移动时,它改变了线圈之间的距离,从而改变了线圈的电感值。
二、psd位置传感器测量的方法1.安装psd位置传感器:首先,需要将psd位置传感器安装在需要测量的设备上。
通常情况下,需要将传感器安装在设备的移动部件上,以便测量设备的位移变化。
2.连接传感器:接下来,需要将传感器连接到电子设备上。
通常,传感器会输出电压或电流信号,需要通过一个ADC(模数转换器)将其转换为数字信号。
3.数据处理:最后,需要对传感器输出的数字信号进行数据处理。
这通常包括滤波、放大和数字信号处理等步骤,以便获得准确的测量结果。
三、psd位置传感器测量的应用psd位置传感器在许多领域都有应用,例如机器人、自动化生产线、航空航天和军事等。
在机器人领域,psd位置传感器可以用于测量机器人的移动距离和速度,以便进行精确的控制。
在自动化生产线中,psd位置传感器可以用于测量设备的移动距离和速度,以确保生产过程的质量和效率。
目录(篇2)1. psd位置传感器测量的原理2. psd位置传感器测量的方法3. psd位置传感器测量的应用正文(篇2)一、psd位置传感器测量的原理psd位置传感器是一种利用压电效应的传感器,它能够测量被测物体的位移。
当传感器受到压力时,它的变形会改变,从而产生一个电信号。
这个信号的大小与被测物体的位移成正比。
通过测量这个电信号,我们可以得到被测物体的位移,从而实现位置测量的功能。
二、psd位置传感器测量的方法psd位置传感器通常采用以下几种方法进行测量:1. 杠杆原理:将psd位置传感器固定在支架上,使其与被测物体接触,通过杠杆原理测量其位移。

PSD位置敏感探测器PSO^JS用途:PSD位置敏感探测器是全球第一套超快响应速度和超高分辨率的LED光学位移测量装置。
可以远距离精确地测量标靶的二维动态位移。
产品概述:LED光学位移测量装置具有如下特点:•最大测量距离为300米(标称距离为100米)•视域宽:1000x1000mm(100米外)•精度高:0.25mm(100米外)•二维(X,Y)测量•多达8点的多标靶测量(额定点数是4点)•超快响应速度,采样频率为10kHz;•用途广,如结构监测,寿命周期成本(LLC)分析或动态响应分析等所做的无损检测。
技术参数:测量距离*:最大300m(标称100m)可测量的距离范围:测量距离的2/3可测量的视域范围:1000x1000mm(100m)测量方向:2维(X,Y)分辨率:0.25mm(100m外)采样频率:0.1ms(10kHz)标靶数量*:最多8个(标配4个)*要求配置长焦距镜头*标准配置只包括4个标靶品牌:品牌型号:型号种类:种类材料:材料材料物理性质:材料物理性质材料晶体结构:材料晶体结构制作工艺:制作工艺输出信号:输出信号防护等级:防护等级线性度:线性度迟滞:迟滞重复性:重复性灵敏度:灵敏度漂移:漂移分辨率:分辨率PSD(PositionSensitiveDetector)是位置敏感检测器。
它分为一维PSD和二维PSD两个类型产品。
PSD是由一个或两个具有均匀阻抗表面组成的PIN光电二极管,它与分立元素探测器相比具有位置分辨率高、反应电流简单、快速(与光点位置有关)等优点。
另外,该PSD的位置信号数据与光点在探测器上的形状无关。
PSD的特性:•位置分辨率高;•可减少来自日光和日光灯的干扰;•极间电阻高(对于S3271〜S3274系列);•响应速度高(对于S3271〜S3274系列);•可以同时测量位置和强度;•检测数据只与光点的能量中心有关;•可靠性高。
PSD的用途:PSD以其诸多优点可广泛应用于光学位置和角度的测量与控制、远程光学控制系统、位移和振动监测、激光光束校准、自动范围探测系统以及人体运动及分析系统等。
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920276622.5(22)申请日 2019.03.05(73)专利权人 信利光电股份有限公司地址 516600 广东省汕尾市汕尾市区工业大道信利工业城一区第15栋(72)发明人 卢道泼 (74)专利代理机构 广州粤高专利商标代理有限公司 44102代理人 李健威 陈卫(51)Int.Cl.G01M 11/02(2006.01)G01C 1/00(2006.01)H04N 17/00(2006.01)(54)实用新型名称一种基于PSD的镜头FOV测量装置(57)摘要本实用新型公开了一种基于PSD的镜头FOV测量装置,包括发光源、反射件和PSD位置传感器,所述反射件位于待测镜头的前方,所述PSD位置传感器位于待测镜头的后方,且所述反射件的反射中心、所述待测镜头的光心以及所述PSD位置传感器的感光中心位于同一直线上;所述发光源发出的光线经所述反射件反射至所述待测镜头内,并在透过所述待测镜头后,在所述PSD位置传感器上被感测。
该基于PSD的镜头FOV测量装置可更加简单地测量镜头的FOV。
权利要求书1页 说明书2页 附图1页CN 209416661 U 2019.09.20C N 209416661U权 利 要 求 书1/1页CN 209416661 U1.一种基于PSD的镜头FOV测量装置,其特征在于,包括发光源、反射件和PSD位置传感器,所述反射件位于待测镜头的前方,所述PSD位置传感器位于待测镜头的后方,且所述反射件的反射中心、所述待测镜头的光心以及所述PSD位置传感器的感光中心位于同一直线上;所述发光源发出的光线经所述反射件反射至所述待测镜头内,并在透过所述待测镜头后,在所述PSD位置传感器上被感测。
2.根据权利要求1所述的基于PSD的镜头FOV测量装置,其特征在于,所述反射件为反射棱镜或反射镜。
基于PSD的腔体相对位移测量方法设计焦新泉;杨文豪;储成群;李治华;李锐锐【摘要】为了测量只能在侧壁安装检测装置的腔体间相对位移,设计了基于面光源的光位移传感器(PSD)位移测量系统.系统将PSD两路电信号的I-V转换、反向放大等信号调理在一片AD824处理,并采用对射式的检测方法,减小了系统体积,简化了结构设计.介绍了位移测量实现过程,并设计系统的标定工装,通过数据后处理方法减小测量误差,提高测量精度.实验结果表明,系统在30 mm量程范围内线性度好,可重复性高,工作在10 kHz不失真,可用于腔体振动等测量,具有很高的实用性.%The measurement of relative movement makes it difficult to settle the detector on objective structure.For the special cavity structure that the detector could only settle on its broadside,a correlative measurement circuit was designed based on PSD(Position Sensitive Detector).The I-V conversion,reverse amplification and other signal conditioning methods are processed on a single AD824.The opposite-type detection method reduces the physical size and simplifies the structural design..The source and sensor are installed out of the cavity,so kinematic interference is avoided.A simple light source design can get high measurement precision,and also make it feasibility.Movement measuring process was introduced in detail,and the calibration fixture is designed for the system.Measurement errors were minimized through data post-processing method which could improve the accuracy of measurement.Experiments show that the system has high repeatability and fast response within 30mm ranges,which can be applied to relative movement measurement system in similar structures.【期刊名称】《电子器件》【年(卷),期】2017(040)004【总页数】4页(P1005-1008)【关键词】非接触测量相;相对位移;PSD;面光源【作者】焦新泉;杨文豪;储成群;李治华;李锐锐【作者单位】中北大学仪器科学与动态测试教育部重点实验室,电子测试技术重点实验室,太原 030051;中北大学仪器科学与动态测试教育部重点实验室,电子测试技术重点实验室,太原 030051;中北大学仪器科学与动态测试教育部重点实验室,电子测试技术重点实验室,太原 030051;中北大学仪器科学与动态测试教育部重点实验室,电子测试技术重点实验室,太原 030051;中北大学仪器科学与动态测试教育部重点实验室,电子测试技术重点实验室,太原 030051【正文语种】中文【中图分类】TP212.9非接触位移测量具有不干涉被测物体运动、受力等优点,典型的测量方法包括光电式、电容式、电感式、微波、超声、电涡流式等方式。
中北大学
课程设计说明书
学生姓名:XXX 学号:XXXXXXXX
学院:信息与通信工程
专业:电子信息科学与技术
题目:基于PSD的位移测试装置设计
指导教师:程耀瑜、李永红职称: 教授 2013年 01 月 18 日
中北大学
课程设计任务书
12/13 学年第一学期
学院:信息与通信工程学院
专业:电子信息科学与技术
学生姓名:陆金贵学号:0905014114 课程设计题目:基于PSD的位移测试装置设计
起迄日期:2012年12月31日~2013年1月18日课程设计地点:主楼1318室,513教研室
指导教师:程耀瑜、李永红
系主任:程耀瑜
下达任务书日期: 2012年12月31日
一、PSD简介
PSD(Position Sensitive Detectors)是一种能测量光点在探测器表面上连续位置的光学探测器。
PSD 由P 衬底、PIN 光电二极管及表面电阻组成。
与CCD 探测器相比,PSD 有诸多优点,如位置分辨率高,响应速度快和处理电路简单等。
另外,位置信号与落在探测器上的光斑形状无关。
各种精度和规格尺寸的PSD 探测器:
图1 PSD探测器
PSD特点:
位置分辨率高、光谱响应宽、响应速度快、位置和光强同时测量、不受光斑的约束、可靠性高等。
PSD应用范围:
光学位置和角度的探测、光学遥测系统、位移和振动测量、激光对中和准直、距离测试、人类运动姿态分析等。
PSD分两种类型:一维PSD(1D-PSD)和两维PSD(称2D-PSD)探测器。
本次设计中我们用到的是一维PSD,下面仅针对一维PSD作详细介绍,另对二位PSD工作原理作简要介绍。
二、一维PSD位置传感器工作原理
1D-PSD 的结构图:
1D -PSD 的等效电路图:
PSD 截面图:
如图所示,PSD 由在平面硅衬底上的三层组成:P 型层在表面,N 型层在另一面, I 层在它们中间。
落在 PSD 上的入射光转换成光电子后由 P 型层上两端电极探测并形成光电流。
PSD 工作原理:
当光点入射到PSD 表面时,由于横向电势的存在,产生光生电流0I ,光生
电流就流向两个输出电极,从而在两个输出电极上分别得到光电流1I
和2I ,显然
012
I I I =+。
而1I 和2I
的分流关系则取决于入射光点到两个输出电极间的等效电
阻。
假设PSD 表面分流层的阻挡是均匀的,则PSD 可简化为如下图所示的电位器模型,其中
1
R 、2R 为入射光点位置到两个输出电极间的等效电阻,显然1R 、2
R
正比于光点到两个输出电极间的距离。
图2 PSD 结构图
图3 PSD 等效电路图
图4 PSD 截面图
由此可得出如下公式:I1 和 I2 是电极的光电流,2L 和 I0 分别代表电极间距和总光电流。
(1)当 PSD 几何中心设定为坐标原点:
因为 I 1 / I 2 = R 2 / R 1 = (L-X )/( L+X ) I 0 = I 1 + I 2
所以可得 I 1 = I 0(L-X )/2L I 2 = I 0(L+X )/2L X =( (I 2 - I 1) / I 0)L (2)当 PSD 一端(R1端)设定为坐标原点:
因为 I 1 / I 2 = R 2 / R 1 = (2L-X )/ X I 0 = I 1 + I 2
所以可得 I 1 = I 0(2L-X )/2L I 2 = I 0(X )/2L
当入射光恒定时,0I 恒定,则入射光点与PSD 中间零位点距离X 与21I I 成线性关系,与入射光点强度无关。
通过适当的处理电路,就可以获得光点位置的输出信号。
三、二维PSD 位置传感器工作原理
如图6(a )所示,在正方形的PIN 硅片的光敏面上设置2对电极,分别标注为Y 1,Y 2和X 3,X 4,其公共N 极常接电源U bb 。
二维PSD 器件的等效电路如图6(b)所示:
图5 PSD 位置测量等效电路图
图6 二维PSD 的结构图与等效电路 图5 PSD 等效电路图
为了减少测量误差常将二维PSD 器件的光敏面进行改进,改进后的PSD 光敏面如图7所示图形,四个引出线分别从四个对角线端引出,光敏面的形状好似正方形产生了枕形畸变。
这种结构的优点是光斑在边缘的测量误差被大大地减少。
PSD 光敏面上光点位置可由如下公式得出: 这里X1 和 X2 代表每一电极
输出信号 (光电流),x 是光点位置坐标。
四、PSD 位移测试装置设计
PSD 供电电路如下图:
C3
104E310uF/25V
R2
512Vref
R1391
E43.3uf/50V
VCC12
T4
图7 改进后的PSD 的结构图与等效电路 图8
放大器LF412芯片:
一维PSD位置检测简化电路原理图如下:
说明:光电流I1经反向放大器A1放大后分别送给放大器A3与A4,而光电流I2经反向放大器A2放大后也分别送给放大器A3与A4,放大器A3为加法电路,完成光电流I1与I2相加的运算(放大器A5用来调整运算后信号的相位);放大器A4用作减法电路,完成光电流I2与I1相减的运算。
PSD位置测试输出处理电路:
00
图9 PSD供电电路图
图11 PSD位置检测电路简图图10 LF412芯片
运算放大器U4A U4B完成PSD两路电流输出I/V变换:
图13
U5A为加法电路,对两路输出进行加法运算,用来验证PSD两路输出之和不随光电位置变化而改变; U5B为减法电路,实现PSD位移测量:
图14
U3A为放大电路,W1用来调节放大增益;U3B为调零电路,通过调节W2阻值大小进行电路调零:
图15
五、PSD位置传感器测量位移方法
1、将激光器引线红色接模块上+5V金色插孔,黑色接GND5金色插孔。
PSD 后金色插孔“I1”“I2”为PSD电流输出,对应接到金色插孔“T6”“T8”, PSD 后金色插孔“C”为PSD供电端,对应接到金色插孔“T4”。
2、将PSD传感器实验单元电路连接起来:“T7”接“T10”“T9”接“T12”“T13”接“T14”“T15”接“T16”,“T17”接“T11”,“T17”和“T18”对应接到万用表电压档正负极,用来测量输出电压。
3、打开主机箱电源开关,打开模块上电源开关,实验模块开始工作。
调整测微头,使激光光点能够在PSD受光面上的位置从一端移向另一端,最后将光点定位在PSD受光面上的正中间位置(目测),调节零点调整旋钮,使电压表显示值为0。
转动测微头使光点移动到PSD受光面一端,调节输出幅度调整旋钮,使电压表显示值为3V或-3V左右。
4、从PSD一端开始旋转测微头,使光点移动,取△X=0.5mm,即转动测微头一转。
读取电压表显示值,填入表1,画出位移-电压特性曲线。
表1 PSD传感器位移值与输出电压值
六、心得体会
通过本次课程设计,我们了解了位置灵敏探测器PSD (Position Sensitive Device) 属于半导体器件。
PSD的主要特点是位置分辨率高、响应速度快、光谱响应范围宽、可靠性高,处理电路简单、光敏面内无盲区,可同时检测位置的光强,测量结果与光斑尺寸和形状无关。
由于其具有特有的性能,因而能获得目标位置连续变化的信号,在位置、位移、距离、角度及其相关量的检测中获得越来越广泛的应用。
在PSD光电实验中,根据读出电压值的变化,可以知道物体的运动变化,从而达到了解光电传感器的构造原理和电子线路的设计与实践、运算放大器的应用。
本次课程设计虽然不是特别顺利,但是让我们深入了解了PSD位移设备装置,使我们在以后的学习、工作、生活中知道该如何运用PSD测量位移。
七、参考文献
[1] 曾光宇,张志伟,张存林.光电检测技术,第二版.北京:北京清华大学出
版社,北京交通大学出版社,2005.
[2]刘笃仁,韩保君。
传感器原理及应用技术.西安:西安电子科技大学出版社,
2003.
[3]童诗白.模拟电子技术基础.北京:人民教育出版社,1980.
[4]秦积荣.光电检测原理及应用.北京:国防工业出版社,1985.
[5]王新贤.通用集成电路检查手册.济南:山东科学技术出版社,2006.
[6]江月松.光电技术与实验.北京:北京理工大学出版社,2000.。