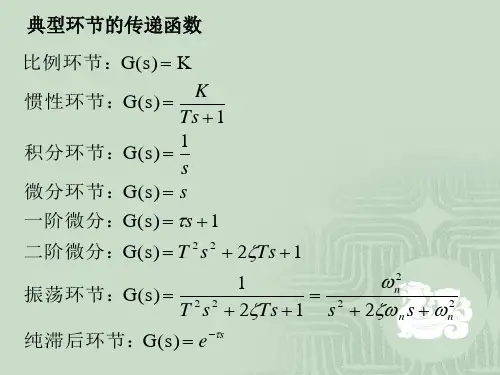
F k x k vdt
1 dF v k dt
4.阻尼器(不储存能量,吸收能→热能) 平动阻尼器 K:阻尼系数 F:阻尼力 dy F kv k y:位移 dt
旋转阻尼器
d T k k dt
K:阻尼系数 ω:旋转角速度 θ:旋转角度 T:阻尼力矩
例2-3
建立如图所示为电枢控制 直流电动机的微分方程, + if 要求取电枢电压 La Ra ua(t)(v)为输入量,电 动机转速ωm(t)(rad/s) + ia ωm 为输出量,列写微分方 负 ua Ea Jm,fm SM 载 程。图中Ra(Ω)、La(H) 分别是电枢电路的电阻 _ 和电感,Mc(N· M)是折 电枢控制直流电动机原理图 合到电动机轴上的总负 载转距。激磁磁通为常 值。
k
F(t)
x(t)位移
m
弹簧 阻尼系数f 阻尼器
首先确定:输入F(t),输出x(t) 其次:理论依据 1.牛顿第二定律 物体所受的合外力等于物 体质量与加速度的乘积 2.牛顿第三定律 作用力等于反作用力,现在 我们单独取出m进行分析
F1 kx ( t ) F 2 f x (t)
而 F ma
K2
Ra Ra f m CmCe
电动机传递系数
如果电枢电阻Ra和电动机的转动惯量Jm都很小而忽 略不计时 ⑥还可进一步简化为 Cem (t ) U a (t ) ⑦ 电动机的转速m (t ) 与电枢电压 U a(t ) 成正比,于是 电动机可作为测速发电机使用。
2 线性系统
1).定义:如果系统的数学模型是线性微分方程,这 样的系统就是线性系统。 线性元件:具有迭加性和齐次性的元件称为线性元 件。
3).重要特点:对线性系统可以应用迭加性和 齐次性,对研究带来了极大的方便。 迭加性的应用:欲求系统在几个输入信号和 干扰信号同时作用下的总响应,只要对这几 个外作用单独求响应,然后加起来就是总响 应。 齐次性表明:当外作用的数值增大若干倍时, 其响应的数值也增加若干倍。这样,我们可 以采用单位典型外作用(单位阶跃、单位脉 冲、单位斜坡等)对系统进行分析——简化 了问题。