图像平滑处理的空域算法和频域分析
- 格式:pdf
- 大小:375.44 KB
- 文档页数:11
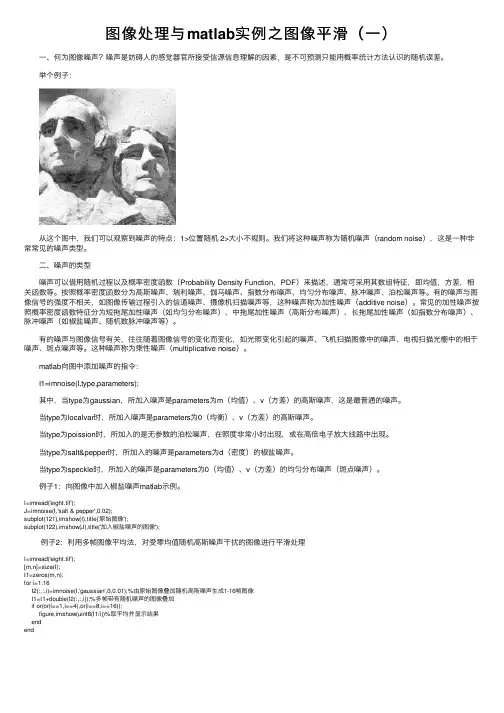
图像处理与matlab实例之图像平滑(⼀) ⼀、何为图像噪声?噪声是妨碍⼈的感觉器官所接受信源信息理解的因素,是不可预测只能⽤概率统计⽅法认识的随机误差。
举个例⼦: 从这个图中,我们可以观察到噪声的特点:1>位置随机 2>⼤⼩不规则。
我们将这种噪声称为随机噪声(random noise),这是⼀种⾮常常见的噪声类型。
⼆、噪声的类型 噪声可以借⽤随机过程以及概率密度函数(Probability Density Function,PDF)来描述,通常可采⽤其数组特征,即均值,⽅差,相关函数等。
按照概率密度函数分为⾼斯噪声、瑞利噪声、伽马噪声、指数分布噪声、均匀分布噪声、脉冲噪声、泊松噪声等。
有的噪声与图像信号的强度不相关,如图像传输过程引⼊的信道噪声、摄像机扫描噪声等,这种噪声称为加性噪声(additive noise)。
常见的加性噪声按照概率密度函数特征分为短拖尾加性噪声(如均匀分布噪声)、中拖尾加性噪声(⾼斯分布噪声)、长拖尾加性噪声(如指数分布噪声)、脉冲噪声(如椒盐噪声、随机数脉冲噪声等)。
有的噪声与图像信号有关,往往随着图像信号的变化⽽变化,如光照变化引起的噪声、飞机扫描图像中的噪声、电视扫描光栅中的相⼲噪声、斑点噪声等。
这种噪声称为乘性噪声(multiplicative noise)。
matlab向图中添加噪声的指令: I1=imnoise(I,type,parameters); 其中,当type为gaussian,所加⼊噪声是parameters为m(均值)、v(⽅差)的⾼斯噪声,这是最普通的噪声。
当type为localvar时,所加⼊噪声是parameters为0(均衡)、v(⽅差)的⾼斯噪声。
当type为poission时,所加⼊的是⽆参数的泊松噪声,在照度⾮常⼩时出现,或在⾼倍电⼦放⼤线路中出现。
当type为salt&pepper时,所加⼊的噪声是parameters为d(密度)的椒盐噪声。
图像平滑处理的空域算法和频域分析1 技术要求对已知图像添加高斯白噪声,并分别用低通滤波器(频域法)和邻域平均法(空域法)对图像进行平滑处理(去噪处理),并分析比较两种方法处理的效果。
2 基本原理2.1 图像噪声噪声在理论上可以定义为“不可预测,只能用概率统计方法来认识的随机误差”。
实际获得的图像一般都因受到某种干扰而含有噪声。
引起噪声的原因有敏感元器件的内部噪声、相片底片上感光材料的颗粒、传输通道的干扰及量化噪声等。
噪声产生的原因决定了噪声的分布特性及它和图像信号的关系。
根据噪声和信号的关系可以将其分为两种形式:(1)加性噪声。
有的噪声与图像信号g(x,y)无关,在这种情况下,含噪图像f(x,y)可表示为f(x,y)=g(x,y)+n(x,y)(2)乘性噪声。
有的噪声与图像信号有关。
这又可以分为两种情况:一种是某像素处的噪声只与该像素的图像信号有关,另一种是某像点处的噪声与该像点及其邻域的图像信号有关,如果噪声与信号成正比,则含噪图像f(x,y)可表示为f(x,y)=g(x,y)+n(x,y)g(x,y)另外,还可以根据噪声服从的分布对其进行分类,这时可以分为高斯噪声、泊松噪声和颗粒噪声等。
如果一个噪声,它的幅度分布服从高斯分布,而它的功率谱密度又是均匀分布的,则称它为高斯白噪声,一般为加性噪声。
2.2 图像平滑处理技术平滑技术主要用于平滑图像中的噪声。
平滑噪声在空间域中进行,其基本方法是求像素灰度的平均值或中值。
为了既平滑噪声又保护图像信号,也有一些改进的技术,比如在频域中运用低通滤波技术。
(1)空域法在空域中对图像进行平滑处理主要是邻域平均法。
这种方法的基本思想是用几个像素灰度的平均值来代替每个像素的灰度。
假定有一幅N*N 个像素的图像f(x,y),平滑处理后得到一幅图像g(x,y)。
g(x,y)由下式决定式中,x,y=0,1,2,…,N-1;S 是(x,y)点邻域中点的坐标的集合,但其中不包括(x,y)点;M 是集合内坐标点的总数。
图像平滑和锐化变换处理一、实验容和要求1、灰度变换:灰度拉伸、直方图均衡、伽马校正、log变换等。
2、空域平滑:box、gauss模板卷积。
3、频域平滑:低通滤波器平滑。
4、空域锐化:锐化模板锐化。
5、频域锐化:高通滤波器锐化。
二、实验软硬件环境PC机一台、MATLAB软件三实验编程及调试1、灰度变换:灰度拉伸、直方图均衡、伽马校正、log变换等。
①灰度拉伸程序如下:I=imread('kids.tif');J=imadjust(I,[0.2,0.4],[]);subplot(2,2,1),imshow(I);subplot(2,2,2),imshow(J);subplot(2,2,3),imhist(I);subplot(2,2,4),imhist(J);②直方图均衡程序如下:I=imread('kids.tif');J=histeq(I);Imshow(I);Title('原图像');Subplot(2,2,2);Imshow(J);Title('直方图均衡化后的图像') ;Subplot(2,2,3) ;Imhist(I,64);Title('原图像直方图') ;Subplot(2,2,4);Imhist(J,64) ; Title('均衡变换后的直方图') ;③伽马校正程序如下:A=imread('kids.tif');x=0:255;a=80,b=1.8,c=0.009;B=b.^(c.*(double(A)-a))-1;y=b.^(c.*(x-a))-1;subplot(3,2,1);imshow(A);subplot(3,2,2);imhist(A);imshow(B);subplot(3,2,4);imhist(B);subplot(3,2,6);plot(x,y);④log变换程序如下:Image=imread('kids.tif');subplot(1,2,1);imshow(Image);Image=log(1+double(Image)); subplot(1,2,2);imshow(Image,[]);2、空域平滑:box、gauss模板卷积。
图象平滑处理图象平滑处理是一种常见的图象处理技术,旨在减少图象中的噪声和细节,使图象更加平滑和清晰。
在本文中,我将详细介绍图象平滑处理的原理、方法和应用。
一、原理图象平滑处理的原理是基于图象中像素值的平均化或者滤波操作。
通过对图象中的像素进行平均化处理,可以减少噪声的影响,使图象更加平滑。
常见的图象平滑处理方法包括均值滤波、中值滤波和高斯滤波。
1. 均值滤波均值滤波是一种简单而有效的图象平滑处理方法。
它通过计算像素周围邻域的平均值来替代该像素的值。
均值滤波器的大小决定了邻域的大小,较大的滤波器可以平滑更大范围的图象。
2. 中值滤波中值滤波是一种非线性滤波方法,它将像素周围邻域的像素值进行排序,并取中间值作为该像素的值。
中值滤波器对于去除椒盐噪声等离群点非常有效,但对于平滑边缘和细节的效果不如均值滤波。
3. 高斯滤波高斯滤波是一种基于高斯函数的线性平滑方法。
它通过对像素周围邻域进行加权平均来替代该像素的值。
高斯滤波器的权重由高斯函数确定,距离中心像素越远的像素权重越小。
高斯滤波器可以有效平滑图象并保持边缘的清晰度。
二、方法图象平滑处理可以使用各种图象处理软件和编程语言来实现。
以下是一种常见的基于Python的图象平滑处理方法的示例:```pythonimport cv2import numpy as npdef image_smoothing(image, method='gaussian', kernel_size=3):if method == 'mean':smoothed_image = cv2.blur(image, (kernel_size, kernel_size))elif method == 'median':smoothed_image = cv2.medianBlur(image, kernel_size)elif method == 'gaussian':smoothed_image = cv2.GaussianBlur(image, (kernel_size, kernel_size), 0) else:raise ValueError('Invalid smoothing method.')return smoothed_image# 读取图象image = cv2.imread('image.jpg')# 图象平滑处理smoothed_image = image_smoothing(image, method='gaussian', kernel_size=5) # 显示结果cv2.imshow('Original Image', image)cv2.imshow('Smoothed Image', smoothed_image)cv2.waitKey(0)cv2.destroyAllWindows()```以上代码使用OpenCV库实现了图象平滑处理。
空域滤波和频域滤波的关系空域滤波是指对图像的像素进行直接操作,通过改变像素的数值来达到滤波的目的。
常见的空域滤波方法包括均值滤波、中值滤波和高斯滤波等。
这些方法主要是通过对像素周围的邻域进行计算,然后用计算结果替代中心像素的值,从而达到平滑图像、去噪或者增强图像细节等效果。
空域滤波是一种直观简单的滤波方法,易于理解和实现。
频域滤波则是将图像从空域转换到频域进行滤波处理。
频域滤波基于图像的频谱特性,通过对图像的频率分量进行调整来实现滤波效果。
频域滤波的基本原理是将图像进行傅里叶变换,将图像从空间域转换到频率域,然后在频率域对图像进行滤波处理,最后再将图像进行傅里叶反变换,将图像从频率域转换回空间域。
常见的频域滤波方法包括低通滤波、高通滤波和带通滤波等。
频域滤波可以有效地去除图像中的噪声、增强图像的细节和边缘等。
空域滤波和频域滤波是两种不同的滤波方法,它们在滤波原理和实现方式上存在一定的差异。
空域滤波是直接对图像像素进行操作,易于理解和实现,但在处理复杂图像时会存在一定的局限性。
频域滤波则是将图像转换到频率域进行处理,可以更加灵活地调整图像的频率特性,适用于处理复杂图像和去除特定频率的噪声。
虽然空域滤波和频域滤波有着不同的原理和实现方式,但它们之间并不是相互独立的。
事实上,这两种滤波方法是可以相互转换和组合的。
在一些实际应用中,我们可以将频域滤波和空域滤波结合起来,通过先对图像进行傅里叶变换,然后在频率域对图像进行滤波处理,最后再将图像进行傅里叶反变换,将图像从频率域转换回空间域。
这种组合使用的方法可以充分发挥两种滤波方法的优势,既可以处理复杂图像,又能够简化计算和提高效率。
空域滤波和频域滤波是数字图像处理中常用的滤波方法。
空域滤波直接对图像像素进行操作,简单直观;频域滤波则是将图像转换到频率域进行处理,更加灵活精确。
虽然它们有着不同的原理和实现方式,但可以相互转换和组合使用,以提高图像处理的效果和质量。
空域处理方法和频域处理方法是数字图像处理中常见的两种基本处理方法,它们在处理图像时有着不同的特点和适用范围。
下面将从原理、应用和效果等方面对两种处理方法进行简要介绍,并对它们的区别进行分析。
一、空域处理方法1. 原理:空域处理是直接对图像的像素进行操作,常见的空域处理包括图像增强、平滑、锐化、边缘检测等。
这些处理方法直接针对图像的原始像素进行操作,通过像素之间的关系来改变图像的外观和质量。
2. 应用:空域处理方法广泛应用于图像的预处理和后期处理中,能够有效改善图像的质量,增强图像的细节和对比度,以及减轻图像的噪声。
3. 效果:空域处理方法对图像的局部特征和细节有很好的保护和增强作用,能够有效地改善图像的视觉效果,提升图像的清晰度和质量。
二、频域处理方法1. 原理:频域处理是通过对图像的频率分量进行操作,常见的频域处理包括傅立叶变换、滤波、频域增强等。
这些处理方法将图像从空间域转换到频率域进行处理,再通过逆变换得到处理后的图像。
2. 应用:频域处理方法常用于图像的信号处理、模糊去除、图像压缩等方面,能够有效处理图像中的周期性信息和干扰信号。
3. 效果:频域处理方法能够在频率域对图像进行精细化处理,提高图像的清晰度和对比度,对于一些特定的图像处理任务有着独特的优势。
三、空域处理方法和频域处理方法的区别1. 原理不同:空域处理方法直接对图像像素进行操作,而频域处理方法是通过对图像进行频率分析和变换来实现图像的处理。
2. 应用范围不同:空域处理方法适用于对图像的局部特征和细节进行处理,而频域处理方法适用于信号处理和频率信息的分析。
3. 效果特点不同:空域处理方法能更好地保护和增强图像的细节和对比度,频域处理方法能更好地处理图像中的周期性信息和干扰信号。
空域处理方法和频域处理方法是数字图像处理中常用的两种处理方法,它们在原理、应用和效果等方面有着不同的特点和适用范围。
在实际应用中,可以根据图像的特点和处理需求选择合适的方法,以获得更好的处理效果。
图像快速平滑处理方法0 引言近年来,随着图形处理器硬件技术的不断进展以及可编程能力的不断增强,越来越多的应用通过使用基于GPU的计算框架提高了算法和系统的效率。
GPU的应用领域不断扩大,已被广泛地应用到通用信号处理、物理模拟、财务数据分析以及生物科学等领域,并取得了显著的效果。
在分子动力学领域中,GeForce 8800GTX 实现了比CPU高达240倍的处理速度。
在脑电波模拟、视觉和嗅觉计算等方面,通过协同CPU和GPU工作,实现了130倍的性能提高。
借助GPU,GIS(地球信息系统)原本需要20分钟完成的计算过程,现在只需要30秒就能完成。
1 GPU并行计算架构GPU现在已已实现可编程的图像处理,由于它具有高内存带宽驱动的多内核,已成为图像处理的绝对主力。
1.1 GPU架构GPU支持单指令多数据(SIMD)指令的数据并行计算。
在SIMD结构中,单一的操纵组件分配到每个管线,相同的指令同时执行。
例如,NVDI8800GT包含每组8个,共14组的多处理器组,但每个处理器只有一个指令单元。
从线程的角度看,每个多处理器组可以同时并行运行768个活跃线程,即GPU包含14组多处理器组可以同时并行10752个活动线程。
在存储器方面,每个多处理器拥有16KB的可读写共享内存、8KB的只读常量缓存、8KB的只读纹理缓存和8192个32位寄存器。
1.2 GPU编程模型CUD(统一设备计算架构)是一个GPU编程平台,见图2。
它包括一个硬件驱动程序和应用程序接口(PI)以及两个数学函数库,因此程序员不需要调用复杂的图形PI接口。
CUD中的PI还兼容标准C语言库,这样程序员就可以通过调用函数访问内存并执行指令。
为了简化开发,CUD同意程序员将CPU代码和GPU的代码混合到程序文件。
NVCC作为C语言编译器,负责隔离设备代码和宿主代码。
在CUD汇编时,GPU作为计算设备可以执行大量的并行线程,类似于CPU的协同处理器。

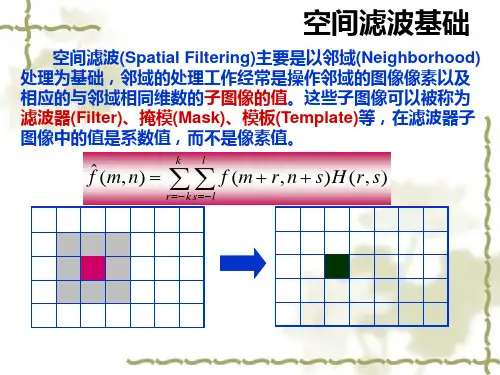
空域滤波的过程和原理
空域滤波是一种图像处理技术,它通过对图像中每一个像素的数值进行操作,来改变图像的外观和质量。
以下是空域滤波的过程和原理:
1. 图像平滑:空域滤波常用于图像平滑操作,这是通过将每一个像素的数值与其周围像素的数值进行平均或加权平均来实现的。
这样可以减少图像中的噪声和细微变化,使图像更加平滑。
2. 图像增强:空域滤波也可以用于图像的增强操作。
这是通过将每一个像素的数值与其周围像素的数值进行比较,并进行一定的算术操作,如加法或乘法来实现的。
这样可以增加图像的对比度和亮度,使图像更加清晰和鲜明。
3. 模糊和锐化:空域滤波还可以用于图像的模糊和锐化操作。
模糊操作通过在图像中每一个像素周围取平均数或加权平均数来实现,可以降低图像的细节和清晰度,使图像看起来更加模糊。
锐化操作则是通过增加图像中每一个像素的值与其周围像素的差值来实现,可以使图像的轮廓更加清晰和锐利。
4. 过滤器选择:在空域滤波中,选择合适的过滤器是很重要的。
过滤器是一个矩阵,用于定义每一个像素与周围像素之间的操作。
常用的过滤器包括平均滤波器、高斯滤波器、中值滤波器等。
不同的过滤器可以实现不同的效果,如平均滤波器可以平滑图像,高斯滤波器可以去除噪声,中值滤波器可以去除椒盐噪声等。
总的来说,空域滤波通过对图像中每一个像素的数值进行操作,实现图像平滑、增强、模糊和锐化等效果。
选择合适的过滤器可以实现不同的图像处理目标。
空域处理方法和频域处理方法是数字图像处理中常用的两种方法。
它们有着各自独特的特点和应用场景。
本文将从原理、应用和区别三个方面对这两种处理方法进行详细比较。
一、原理1. 空域处理方法空域处理方法是指直接对图像的像素进行操作。
它是一种基于图像的原始信息进行处理的方法。
常见的空域处理操作包括亮度调整、对比度增强、图像锐化等。
这些操作都是基于每个像素点周围的邻域像素进行计算和处理的。
2. 频域处理方法频域处理方法是将图像从空间域转换到频率域进行处理。
其基本原理是利用傅里叶变换将图像信号从空间域转换到频率域,然后对频率域的图像进行滤波、增强等处理,最后再利用傅里叶反变换将图像信号转换回空间域。
二、应用1. 空域处理方法空域处理方法适用于对图像的局部信息进行处理,如调整图像的明暗、对比度和色调等。
它可以直接对原始图像进行处理,因此在实时性要求较高的场景下具有一定优势。
2. 频域处理方法频域处理方法适用于对图像的全局信息进行处理,如去除图像中的周期性噪声、增强图像的高频细节等。
由于频域处理方法能够通过滤波等手段对图像进行全局处理,因此在一些需要对图像进行频谱分析和滤波的场景下有着独特的优势。
三、区别1. 数据处理方式空域处理方法是直接对图像的像素进行操作,处理过程直接,但只能处理原始图像信息。
而频域处理方法是将图像信号转换到频率域进行处理,可以更全面地分析和处理图像的频率特性。
2. 处理效果空域处理方法主要用于对图像的局部信息进行处理,因此适合对图像的亮度、对比度等进行调整。
而频域处理方法主要针对图像的全局信息进行处理,能够更好地处理图像的频率特性,如滤波、增强等。
3. 处理速度空域处理方法直接对原始图像进行处理,处理速度较快;而频域处理方法需要将图像信号转换到频率域进行处理,处理速度相对较慢。
空域处理方法和频域处理方法分别适用于不同的处理场景。
空域处理方法主要用于对图像的局部信息进行处理,处理速度较快;而频域处理方法主要用于对图像的全局信息进行处理,能够更全面地分析和处理图像的频率特性。
空域处理方法和频域处理方法是数字图像处理中常用的两种处理方式,它们在处理图像时具有不同的特点和优势。
本文将对这两种处理方法进行比较和分析,探讨它们的区别和应用场景。
一、空域处理方法1. 空域处理方法是指直接对图像的像素进行处理,通过对图像的像素值进行加减乘除等操作,来实现对图像的处理和增强。
2. 空域处理方法的优势在于简单直观,操作方便。
常见的空域处理方法包括灰度变换、直方图均衡化、平滑滤波、锐化滤波等。
3. 空域处理方法的缺点是无法充分利用图像的局部特征和频域信息,对某些复杂的图像处理任务效果不佳。
二、频域处理方法1. 频域处理方法是指将图像转换到频域进行处理,通过对图像的频谱进行操作,来实现对图像的处理和增强。
2. 频域处理方法的优势在于能够充分利用图像的频域信息,对图像进行更加精细和复杂的处理。
常见的频域处理方法包括傅里叶变换、频谱滤波、离散余弦变换等。
3. 频域处理方法的缺点是操作复杂,需要进行频域变换和逆变换,计算量大,处理过程较为繁琐。
三、空域处理方法和频域处理方法的区别1. 原理差异:空域处理方法是直接对图像的像素进行处理,而频域处理方法是将图像转换到频域进行处理。
2. 应用范围差异:空域处理方法适用于简单的图像处理和增强任务,频域处理方法适用于对图像进行精细和复杂的处理。
3. 操作难易度差异:空域处理方法操作简单直观,频域处理方法操作复杂繁琐。
四、空域处理方法和频域处理方法的应用场景1. 空域处理方法适用于对图像进行一些简单的增强和处理,如亮度调整、对比度增强、边缘检测等。
2. 频域处理方法适用于对图像进行复杂的增强和处理,如去除噪声、图像复原、频谱滤波等。
在实际的图像处理任务中,根据具体的处理要求和效果需求,可以灵活选择空域处理方法和频域处理方法,以达到最佳的处理效果。
总结:空域处理方法和频域处理方法在数字图像处理中各有优势和特点,应用于不同的处理场景和任务中。
了解和掌握这两种处理方法的区别和优势,能够更好地进行图像处理和增强,提高处理效率和质量。
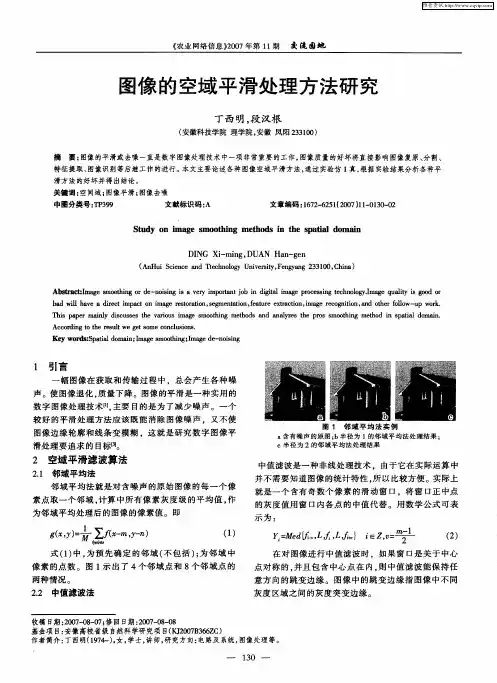
前言对于一个图像处理系统来说,可以将流程分为三个阶段,在获取原始图像后,首先是图像预处理阶段、第二是特征抽取阶段、第三是识别分析阶段。
图像预处理阶段尤为重要,如果这阶段处理不好,后面的工作根本无法展开。
在实际应用中,我们的系统获取的原始图像不是完美的,例如对于系统获取的原始图像,由于噪声、光照等原因,图像的质量不高,所以需要进行预处理,以有利于提取我们感兴趣的信息。
图像的预处理包括图像增强、平滑滤波、锐化等内容。
图像的预处理既可以在空间域实现,也可以在频域内实现,我们主要介绍在空间域内对图像进行点运算,它是一种既简单又重要的图像处理技术,它能让用户改变图像上像素点的灰度值,这样通过点运算处理将产生一幅新图像。
下面我们开始介绍与图像点运算的相关知识。
一、图像的直方图图像直方图是图像处理中一种十分重要的图像分析工具,它描述了一幅图像的灰度级内容,任何一幅图像的直方图都包含了丰富的信息,它主要用在图象分割,图像灰度变换等处理过程中。
从数学上来说图像直方图是图像各灰度值统计特性与图像灰度值的函数,它统计一幅图像中各个灰度级出现的次数或概率;从图形上来说,它是一个二维图,横坐标表示图像中各个像素点的灰度级,纵坐标为各个灰度级上图像各个像素点出现的次数或概率。
如果不特别说明,本讲座中的直方图的纵坐标都对应着该灰度级在图像中出现的概率。
我们的例子是在一个对话框中显示一个图像的直方图,为实现该目的,我们定义了一个名为"ZFT"的对话框类用来显示图像的直方图,具体实现代码和效果图如下(关于代码实现部分可以参考笔者2001年在天极网上发表的一篇VC实现数字图像处理的文章)://////////////////////////////////直方图对话框构造函数;ZFT::ZFT(CWnd* pParent /*=NULL*/): CDialog(ZFT::IDD, pParent)//ZFT为定义的用来显示直方图的对话框类;{Width=Height=0;//对话框初始化阶段设置图像的宽和高为"0";}////////////////////////对话框重画函数;void ZFT::OnPaint(){CRect rect;//矩形区域对象;CWnd *pWnd;//得到图片框的窗口指针;pWnd=GetDlgItem(IDC_Graphic);//得到ZFT对话框内的"Frame"控件的指针;file://(IDC_Graphic为放置在对话框上的一个"Picture"控件,并讲类型设置为"Frame")。
空域数值计算与优化方法空域数值计算是指在图像处理和计算机视觉领域中,通过对图像的像素进行数值计算来实现各种图像处理和分析任务的方法。
它是一种基于像素级别的计算方法,能够直接处理和分析图像的像素信息,因此在许多应用中具有很高的效率和准确性。
空域数值计算方法广泛应用于图像增强、图像分割、图像特征提取等多个方面。
在图像增强方面,常见的空域数值计算方法有直方图均衡化、图像平滑和图像锐化等。
直方图均衡化是指通过对图像的像素值进行调整,使得图像的像素分布更加均匀,从而提高图像的对比度和视觉效果。
图像平滑可以通过对图像的像素进行滤波操作来实现,例如常用的平均滤波和高斯滤波等。
而图像锐化则是通过增强图像边缘和细节信息,使得图像更加清晰和鲜明。
除了图像增强,空域数值计算方法在图像分割和图像特征提取方面也有很多应用。
图像分割是将图像根据像素的相似性进行分割,将图像分成多个区域或对象,从而实现对图像内容的理解和分析。
空域数值计算方法可以通过分析图像的像素值和颜色等特征来进行图像分割,例如利用聚类方法对像素进行分类,或者利用阈值法将图像像素分成不同的区域。
图像特征提取则是从图像中提取出具有代表性的特征,用于图像识别、目标检测等任务。
空域数值计算方法可以通过计算像素的灰度值、颜色直方图、纹理特征等来提取图像特征,从而实现对图像内容的描述和分析。
在空域数值计算方法中,优化是一个重要的研究方向。
由于图像是由大量像素组成的,计算量大,因此如何提高图像处理和分析的效率和速度是一个关键问题。
在空域数值计算中,常用的优化方法包括并行计算、向量化计算和快速算法等。
并行计算是指同时使用多个计算单元来进行计算,使得计算速度得到提升。
在空域数值计算中,可以将图像分成多个块,然后分配给不同的计算单元并行计算,从而实现对图像的快速处理。
向量化计算是指利用向量和矩阵运算来实现计算的加速。
在空域数值计算中,可以将图像像素看作是一个向量或矩阵,然后使用向量和矩阵运算进行加速计算,例如使用快速傅里叶变换来进行频域计算。