§5-2 反z变换
- 格式:pdf
- 大小:182.85 KB
- 文档页数:23

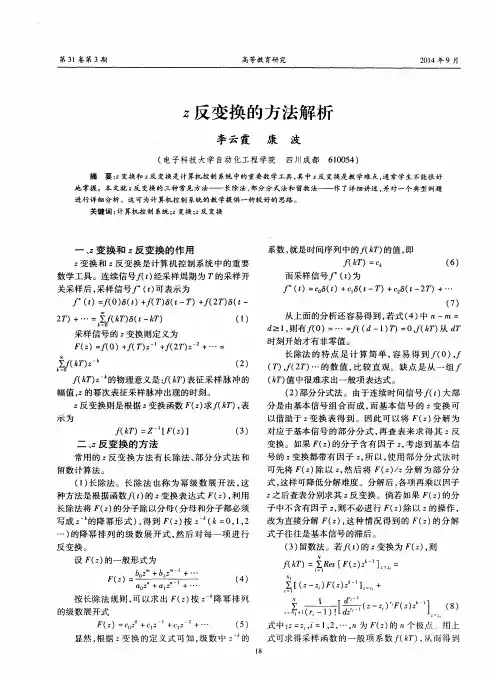
《自动控制原理》z变换与z反变换自动控制原理是一门研究系统动态特性与控制方法的学科,其中涉及到了很多数学工具和方法,其中之一就是z变换和z反变换。
本文将对z 变换和z反变换进行详细的解释和介绍。
z变换是一种非常重要的数学工具,它是离散时间信号和系统分析中的一种常用方法。
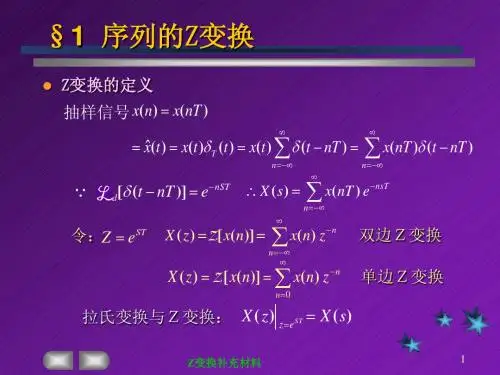
z变换的定义如下:X(z)=Z[x(n)]=∑[x(n)*z^(-n)]其中,x(n)为离散时间信号,X(z)为z变换后的结果,z为变量。
z变换可以将离散时间信号从时域转换到z域,从而可以更方便地进行分析和处理。
z变换可以将离散时间信号表示为有理函数的形式,从而可以用于求解离散时间系统的频率响应、系统稳定性等问题。
z变换的性质有很多,这里只介绍其中几个重要的性质。
首先是线性性质,即线性系统的z变换可以表示为输入信号和系统冲激响应的z变换的乘积。
其次是时移性质,即输入信号的z变换与输入信号z变换乘以z^(-n)的结果相等。
最后是共轭对称性质,即输入信号为实数序列时,其z变换的共轭对称性质。
在进行z变换的计算时,可以使用z变换的表格、z变换的性质以及z变换的逆变换来简化计算。
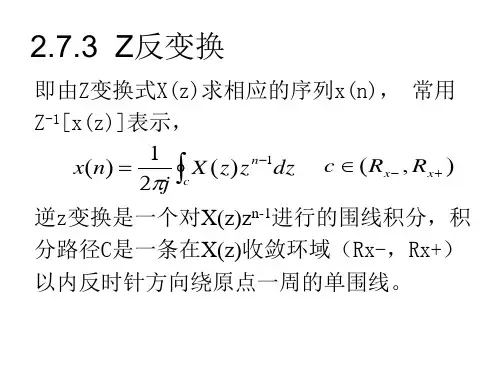
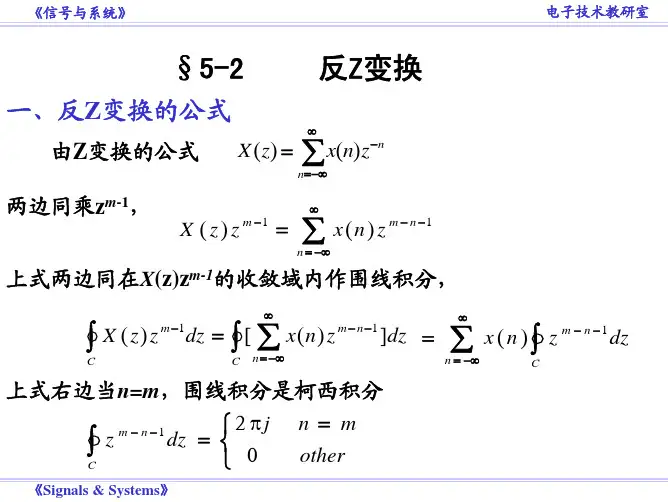
z变换的逆变换可以将z域的信号重新转换回时域的信号,其定义如下:x(n) = Z^(-1)[X(z)] = (1/2πj) * ∮[X(z) * z^(n-1) * dz]其中,X(z)为z变换的结果,x(n)为z变换的逆变换结果。
z反变换可以将z域的信号转换为时域的信号,从而可以得到离散时间信号的具体数值。
z变换和z反变换在自动控制领域中有着广泛的应用。
例如,在系统建模和分析中,可以通过z变换将离散时间系统转换为z域的传递函数,从而可以方便地进行系统分析和控制器设计。
此外,在数字滤波器设计中,z变换也是一种常用的工具,可以将滤波器的差分方程转换为z域的传递函数,从而可以设计出满足要求的数字滤波器。
总结起来,z变换和z反变换是自动控制原理中的重要数学工具,可以方便地进行离散时间信号和系统的分析和处理。

z变换反演积分法
Z变换反演积分法是通过利用逆Z变换的公式,将Z变换的结果反变换成时域信号。
具体步骤如下:
1. 根据信号的Z变换结果,确定其逆Z变换的公式。
2. 将Z变换结果的极坐标形式转换为分数形式,即将Z变换
结果表示为分子和分母的比值。
3. 将分数形式的Z变换结果进行部分分式展开,得到Z变换
结果的逆Z变换表达式。
4. 反变换的结果通常是关于n的时域信号,其中n为正整数。
5. 根据逆Z变换的公式,对得到的逆Z变换表达式进行展开,得到最后的时域信号。
需要注意的是,逆Z变换涉及到部分分式展开,通常需要使
用拉普拉斯反演公式、维特公式等方法来求解。
对于复杂的Z
变换结果,逆Z变换可能会比较繁琐或难以求解,因此在实
际应用中,常常利用Z变换表格或数值计算方法来进行逆Z
变换。