自动控制原理课程设计高阶系统的时域分析
- 格式:docx
- 大小:211.20 KB
- 文档页数:14
目录1系统稳定性分析 (1)2高阶系统的时域响应 (2)2.1系统单位阶跃响应曲线 (2)2.2系统单位斜坡响应曲线 (4)2.3系统单位加速度响应曲线 (5)2.4动态性能指标计算 (6)2.4.1动态性能指标计算 (6)2.4.2动态性能指标计算 (6)2.5 稳态性能指标计算 (9)3根轨迹图绘制 (10)3.1根轨迹数据计算 (10)3.2用MATLAB绘制根轨迹图 (11)4心得体会 (12)参考文献 (13)本科生课程设计成绩评定表高阶系统的时域分析1 系统稳定性分析给定参数系统稳定性分析: 对于开环传递函数))(95()()(2a s s s s b s K s G p ++++=在给定条件K=15,a=2,b=4时用劳斯判据判断系统的稳定性,经过化简可得系统的特征方程为:D(s)=S 4+7S 3+19S 2+33S+60=0其劳斯表为S 41 19 60 S 3 7 33 0 S2 14.3 60 S 1 3.6 0 S 0 60从表中可以看出,第一列系数符号全部为正,故系统是稳定的。
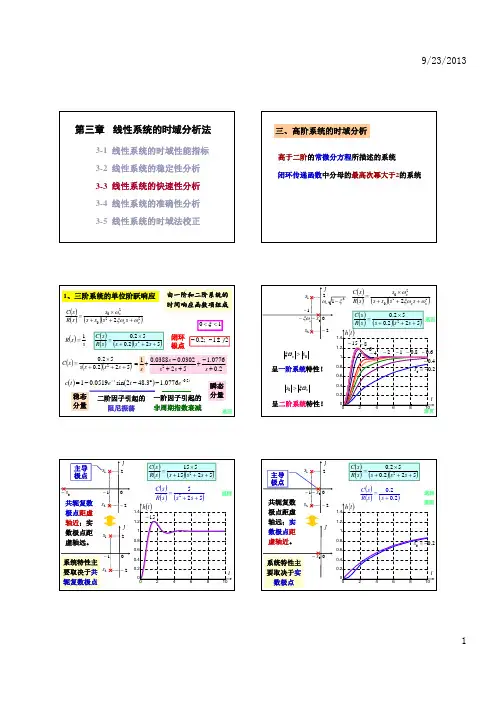
2高阶系统的时域响应K=15,a=2,b=4时,系统的开环传递函数为:G p=15(s+4)s(s2+5s+9)(s+2)=15s+60s4+7s3+19s2+18s系统为Ⅰ型系统,可以跟踪单位阶跃信号、单位斜坡信号,不能跟踪单位加速度信号。
系统响应为C(s)=15s+60s4+7s3+19s2+33s+60R(s)2.1系统单位阶跃响应曲线当输入为单位阶跃函数信号时,R(s)=1S,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1S运用MATLAB程序作图如图2-1,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);step(G);grid on;xlabel('t');ylabel('c(t)');title('单位阶跃响应')图2-1 系统阶跃响应由图中数据可得:上升时间为t=1.02sr峰值时间=1.73stp调节时间=33.1sts超调量σ%=78%稳态误差为=0ess当输入为单位斜坡函数信号时,R(s)=1s2,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1s2运用MATLAB程序作图如图2-2,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);t=0:0.01:10;u=t;lsim(G,u,t);grid on; xlabel('t');ylabel('c(t)');title('单位斜坡响应')图2-2 单位斜坡响应当输入为单位加速度函数信号时,R(s)=1s3,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1s3运用MATLAB程序作图如图2-3,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);t=0:0.01:10;u=(0.5*t.^2);lsim(G,u,t)grid on;xlabel('t');ylabel('c(t)');title('单位加速度响应')图2-3 单位加速度响应2.4动态性能指标计算2.4.1主导极点法控制系统的暂态性能指标通常是零初始条件下,通过系统的阶跃响应的特征定义的,系统的暂态性能指标实际上就是刻画阶跃响应曲线特征的一些量。

自动控制5基于MATLAB高阶控制系统的时域响应动态性
能分析
一,高阶系统时域响应分析
1、定义
时域响应动态性能分析是指对高阶系统(在此处是MATLAB控制系统)的其中一特定输入或刺激的响应随时间的变化情况的分析,其中,包括响
应的出现时间、升降时间、振荡次数、最大响应量及其回归时间等。
这种
类型的分析可以帮助我们更清楚地了解系统的动态特性,以及我们在设计
控制系统时所要达到的性能目标。
2、计算方法
MATLAB提供了一系列时域响应动态性能分析的内置工具,例如最大值、最小值、累积时间、中值、平均时延等的计算,其中,最大值计算可
以通过使用系统的输入和输出数据,使用MATLAB的关系函数max(来实现;最小值计算则可以使用min(函数;累积时间可以使用累积函数cumsum(来
实现。
最后,可以使用matlab函数plot(将计算结果可视化。
三,实验案例
下面,我们通过实验案例来检验MATLAB的时域响应动态性性能分析
是否有效:
假设有如下的MATLAB控制系统:
S = tf(1,[1 2 1])
首先,我们需要为系统设置一个输入信号u,我们在这里设置:
u=t
然后,我们计算该系统的输出信号y:
y = lsim(S,u,t)
最后,使用MATLAB函数plot(来可视化计算的输出y:plot(t,y)
从上图中可以清楚的看出。

目录1系统稳定性分析 (1)2高阶系统的时域响应 (2)2.1系统单位阶跃响应曲线 (2)2.2系统单位斜坡响应曲线 (4)2.3系统单位加速度响应曲线 (5)2.4动态性能指标计算 (6)2.4.1动态性能指标计算 (6)2.4.2动态性能指标计算 (6)2.5 稳态性能指标计算 (9)3根轨迹图绘制 (10)3.1根轨迹数据计算 (10)3.2用MATLAB绘制根轨迹图 (11)4心得体会 (12)参考文献 (13)本科生课程设计成绩评定表高阶系统的时域分析1 系统稳定性分析给定参数系统稳定性分析: 对于开环传递函数))(95()()(2a s s s s b s K s G p ++++=在给定条件K=15,a=2,b=4时用劳斯判据判断系统的稳定性,经过化简可得系统的特征方程为:D(s)=S 4+7S 3+19S 2+33S+60=0其劳斯表为S 41 19 60 S 3 7 33 0 S2 14.3 60 S 1 3.6 0 S 0 60从表中可以看出,第一列系数符号全部为正,故系统是稳定的。
2高阶系统的时域响应K=15,a=2,b=4时,系统的开环传递函数为:G p=15(s+4)s(s2+5s+9)(s+2)=15s+60s4+7s3+19s2+18s系统为Ⅰ型系统,可以跟踪单位阶跃信号、单位斜坡信号,不能跟踪单位加速度信号。
系统响应为C(s)=15s+60s4+7s3+19s2+33s+60R(s)2.1系统单位阶跃响应曲线当输入为单位阶跃函数信号时,R(s)=1S,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1S运用MATLAB程序作图如图2-1,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);step(G);grid on;xlabel('t');ylabel('c(t)');title('单位阶跃响应')图2-1 系统阶跃响应由图中数据可得:上升时间为t=1.02sr峰值时间=1.73stp调节时间=33.1sts超调量σ%=78%稳态误差为=0ess当输入为单位斜坡函数信号时,R(s)=1s2,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1s2运用MATLAB程序作图如图2-2,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);t=0:0.01:10;u=t;lsim(G,u,t);grid on; xlabel('t');ylabel('c(t)');title('单位斜坡响应')图2-2 单位斜坡响应当输入为单位加速度函数信号时,R(s)=1s3,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1s3运用MATLAB程序作图如图2-3,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);t=0:0.01:10;u=(0.5*t.^2);lsim(G,u,t)grid on;xlabel('t');ylabel('c(t)');title('单位加速度响应')图2-3 单位加速度响应2.4动态性能指标计算2.4.1主导极点法控制系统的暂态性能指标通常是零初始条件下,通过系统的阶跃响应的特征定义的,系统的暂态性能指标实际上就是刻画阶跃响应曲线特征的一些量。
本系统属于高阶系统,无法用处理二阶系统的方法得到系统性能指标的精确解析表达式。
即使用数值计算的方法,也会遇到求解复杂的超越方程的困难。
所以对于高阶系统的暂态性能分析一般采取主导极点法。
系统的闭环传递函数为:Φ(s)=M(s)D(s)=15(s+4)(s+0.085−j2.12)(s+0.085+j2.12)(s+3.4+j1.29)(s+3.4−j1.29)取主导极点为s1,2=-0.085±2.12j闭环零点z1=-4则高阶系统的单位阶跃响应可以近似为:c(t)=M(0)D(0)+2|M(S1)S1D(s1)|e−σt cos[ωd t+∠M(S1)S1D(s1)]t p≈1ωd[π−∑∠(s1−z i)1i=1+∑∠(s1−s i)4i=3]计算得:t p=12.12(π−28°+45.8°+14°)=1.74sσp=∏|s i|4i=3∏|s1−s i|4i=3∙∏|s1−z i|1i=1∏|z i|1i=1∙e−σt p计算得:σp=0.7932.4.2 MATLAB编程动态性能指标是指稳定的系统在单位阶跃函数作用下,动态过程随时间t的变化状况的指标,体现系统动态过程特征。
用解析法求解高阶系统的动态性能指标很困难,这里用MATLAB编程求解。
调用单位阶跃响应函数step(),获得系统的单位阶跃响应,当采用[y,t]=step(sys)的调用格式时,将返回值y及相应的时间t,通过对y和t进行计算,可以得到高阶系统各项动态性能指标。
利用MATLAB编程求取系统动态性能指标程序如下:sys=tf([15 60],[1 7 19 33 60])C=dcgain(sys);[y,t]=step(sys);[Y,k]=max(y);tp=t(k)Mp=(Y-C)/Cn=1;while y(n)<Cn=n+1;endtr=t(n)i=length(t);while(y(i)>0.98*C)&(y(i)<1.02*C)i=i-1;endts=t(i)结果如图所示:2.5稳态性能指标计算E(s)=11+15s +60s 4+7s 3+19s 2+18s∙R(s) =s 4+7s 3+19s 2+18s s 4+7s 3+19s 2+33s+60∙R(s)当输入信号为单位阶跃响应时,R(s)=1SsE(s)=s 4+7s 3+19s 2+18ss 4+7s 3+19s 2+33s+60e ss=lim s→0sE(s)=0当输入为单位斜坡函数信号时,R(s)=1s 2sE(s)=s 3+7s 2+19s+18s 4+7s 3+19s 2+33s+60e ss=lim s→0sE(s)=1860=0.3当输入为单位加速度函数信号时,R(s)=1s3sE(s)=s 3+7s 2+19s+18s 5+7s 4+19s 3+33s 2+60se ss=lim s→0sE(s)=∞3 根轨迹图绘制3.1根轨迹数据计算当a=1,b=4时,G F = K (s+4)s (s 2+5s+9)(s+1)根轨迹相关参数计算如下:1)系统开环零点为z=-4;2)开环极点为s 1=0,s 2=-2.5+j1.66,s 3=-2.5-j1.66,s 4=-1;3)系统有max{ m ,n }=4 根分支;4)实轴上的根轨迹为(-1,0)和(-∞,-4);5)系统的m=1,n=4,故根轨迹的渐近线为3条,渐近线与实轴的交角分π3、−π3、π。
渐近线与横轴交点为(−23,0); 6)根轨迹的分离点:由方程 A ’B-B ’A=03s 4+28s 3+86s 2+112s +36=0可计算得约为(-5,0)和(-0.462,0);7)根轨迹与虚轴的交点:闭环特征方程:s 4+6s 3+14s 2+(9+K )s +4K =0其劳斯表为S 41 14 4KS 3 6 9+K 0S 2 75−K 64K S 1 9+K-144K 75−K 0 S 04K用劳斯判据可算得w=±1.68 K=7.863.2用MATLAB绘制根轨迹图运用MATLAB作图如图2-4所示,程序如下num=[1 4];den=[1 6 14 9 0];rlocus(num,den)图3-1 根轨迹图4心得体会对高阶系统进行时域分析,运用经典解析方法,采用拉普拉斯反变换求解瞬态响应时域表达式比较复杂,要计算出各项动态性能指标也很困难。
但对于许多高阶系统,利用主导极点法可以简化系统的分析和性能指标的估算。
而利用MATLAB软件可以方便地对高阶系统时域响应进行准确分析。
本次课程设计的重要部分为系统稳定性的判断以及在各种典型信号作用下系统的响应性能分析。
在求解多元不等式组方面有较大的困难。
通过查阅书本资料,觉得使用函数图像表征个参变量之间的关系比较可行,但实际做的过程中,发现三变量之间的函数图像并不好作,而且涉及到高次的方程求解,十分困难。
在解高阶系统的斜坡响应与加速度响应时,做时域的变换也比较困难。
在课程设计中,加深了对所学自动控制原理课程知识的理解,特别是系统稳定性分析,系统各项动态性能指标,稳态误差以及系统根轨迹等相关知识的理解。
设计时借助MATLAB 软件进行控制系统分析,进一步熟悉了MATLAB语言及其应用。
书写课程设计说明书时使用WORD软件,使我掌握了许多WORD编辑和排版技巧。
通过本次课设,我不但对所学的自动控制原理的相关知识有了更深入的认识和更牢固的掌握,而且学会了运用MATLAB来解决高阶系统的分析和设计的相关问题。
总而言之,这次课程设计又让我重新巩固了自动控制原理的相关知识,特别是关于系统稳定性分析,系统各项动态性能指标,稳态误差以及根轨迹的绘制等。
通过借助强大的MATLAB软件,让我熟悉了MATLAB的语言及应用,学会运用有效的工具解决人工计算比较复杂的情况,起到事半功倍的效果。
因此,在以后的学习过程中,我们不仅要在课堂上加强理论基础的学习,在实际运用上还要根据实际情况运用各种工具来进行更精准的分析,不仅是死读书,而是在各方面提高自己的能力。
参考文献[1] 胡寿松.自动控制原理(第四版).科学出版社,2002[2]胡寿松.自动控制原理习题解析(第五版).科学出版社,2006[3] 黄忠霖.完全手册MATLAB使用详解.电子工业出版社,2009[4] 邹伯敏.自动控制理论.机械工业出版社,2007[5] 刘泉、江雪梅.信号与系统.高等教育出版社.2006[6]王正林,王胜开等.MATLAB/Simulink与控制系统仿真(第2版).北京:电子工业出版社,2008[7]王万良,自动控制原理.高等教育出版社,2008。