第一章 反馈控制系统实例
- 格式:ppt
- 大小:6.60 MB
- 文档页数:91

第一篇过程控制系统第一章单回路反馈控制系统简称:单回路控制系统、简单控制系统在所有反馈控制系统中,单回路反馈控制系统是最基本、结构最简单的一种。
在生产过程控制中应用得最为广泛的、并能解决大量控制问题的系统(70%)。
研究单回路系统的分析和设计方法,是研究复杂控制系统的基础。
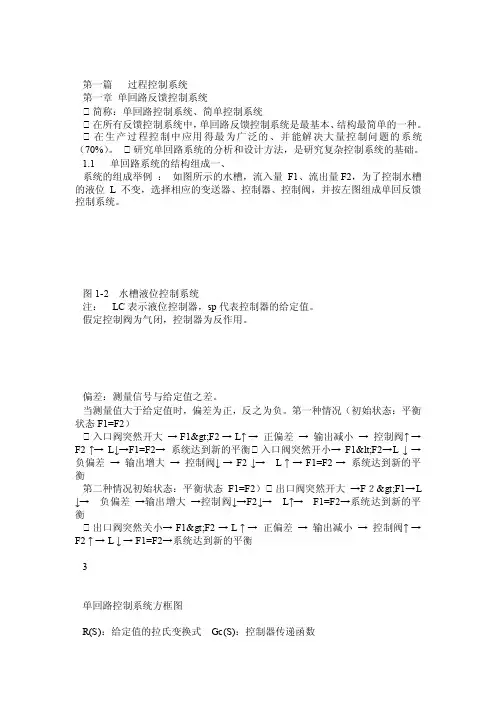
1.1 单回路系统的结构组成一、系统的组成举例:如图所示的水槽,流入量F1、流出量F2,为了控制水槽的液位L不变,选择相应的变送器、控制器、控制阀,并按左图组成单回反馈控制系统。
图1-2 水槽液位控制系统注:LC表示液位控制器,sp代表控制器的给定值。
假定控制阀为气闭,控制器为反作用。
偏差:测量信号与给定值之差。
当测量值大于给定值时,偏差为正,反之为负。
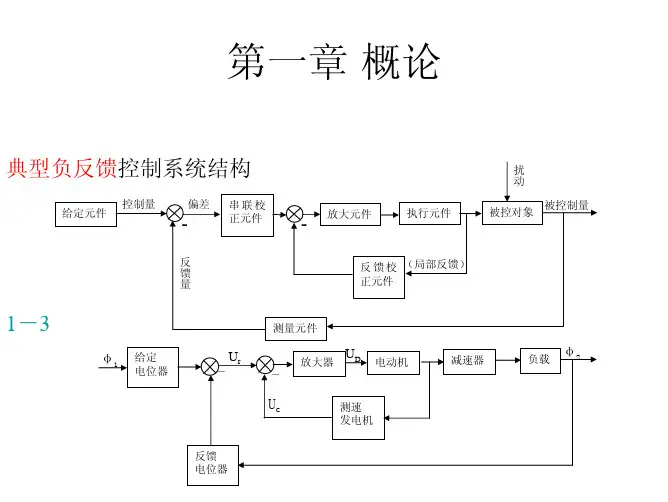
第一种情况(初始状态:平衡状态F1=F2)入口阀突然开大→ F1>F2 → L↑ → 正偏差→ 输出减小→ 控制阀↑ → F2 ↑→ L↓→F1=F2→ 系统达到新的平衡 入口阀突然开小→ F1<F2→L ↓ → 负偏差→ 输出增大→ 控制阀↓ → F2 ↓→ L ↑ → F1=F2 → 系统达到新的平衡第二种情况初始状态:平衡状态F1=F2) 出口阀突然开大→F2>F1→L ↓→ 负偏差→输出增大→控制阀↓→F2↓→ L↑→ F1=F2→系统达到新的平衡出口阀突然关小→ F1>F2 → L ↑ → 正偏差→ 输出减小→ 控制阀↑ → F2 ↑ → L ↓ → F1=F2→系统达到新的平衡3单回路控制系统方框图R(S):给定值的拉氏变换式Gc(S):控制器传递函数X(S):测量值的拉氏变换式Gv(S):控制阀传递函数E(S):偏差的拉氏变换式Gm(S) 变送器传递函数U(S):控制信号的拉氏变换式Go(S):对象控制通道的传函Q(S):操纵变量的拉氏变换式Gf(S):对象扰动通道的传函Y(S):被控变量的拉氏变换式F(S):扰动信号的拉氏变换式几点说明:(1)图中的各个信号值都是增量初始状态为零;图中箭头表示的是信号流向,而不是物料或能量的流向。

第三讲机体生理功能的调节一、生理功能的调节方式(一)神经调节●概念:通过神经系统的活动对机体功能进行调节。
基本方式:反射(reflex)。
●反射:在中枢神经系统的参与下,机体对刺激产生的规律性反应。
结构基础:反射弧(reflex arc);组成:感受器、传入神经、中枢、传出神经和效应器;类型:非条件反射和条件反射。
●神经调节的特点:迅速、精确、时间短暂。
例:颈动脉窦和主动脉弓压力感受性反射(负反馈调节)例:脊柱的神经传导活动(二)体液调节●概念:体内的一些细胞能生成并分泌某些特殊的化学物质,后者经由体液运输,到达全身的组织细胞或某些特殊的组织细胞,通过作用于细胞上相应的受体(receptor),对这些细胞的活动进行调节。
●类型:全身性体液调节、局部性体液调节、神经-体液调节●特点:缓慢、弥散、持久神经-体液调节神经细胞直接或间接地调节一些内分泌细胞的作用,使这些内分泌细胞成了反射弧的传出纤维的延长部分,以这种方式发挥的调节作用称为神经-体液调节。
(三)自身调节●概念:环境变化时,器官、组织、细胞不依赖神经或体液调节而产生的适应性反应。
肾血流自身调节:动脉血压在80-180mmHg范围内变动时,肾血流量能保持相对稳定。
脑血流自身调节:动脉血压在60-140mmHg范围内变动时,脑血流量能保持相对稳定。
●特点:调节幅度小,不灵敏,局限。
二、体内的控制系统●人体功能调节过程和工程控制有许多共同的规律。
●从控制论的角度来看,人体内存在数以千计的各种控制系统(control system);甚至在一个细胞内也存在着许多极其精细复杂的控制系统,对细胞的各种功能进行调节。
因此,学者们也应用控制论的概念、原理和方法来认识和分析机体各种功能的调节。
●从控制论的观念来分析,任何控制系统都由控制部分和受控部分组成。
控制系统可分为三大类:非自动控制系统反馈控制系统前馈控制系统(一)非自动控制系统●非自动控制系统是一种“开环”系统。
热工控制系统B思考题与习题第一章控制系统概述1. 什么叫自动控制系统?2.自动控制系统主要由哪几部分组成?每一部分的作用是什么?3.控制对象、被控制量、控制量和给定值是如何定义的?请举例说明。
4.自动控制系统的主要分类方法有哪几种?说明各种分类方法的特点,指出各种分类方法所包括的系统是什么?各系统的特点是什么?5.什么叫前馈控制系统?什么叫反馈控制系统?6.什么叫反馈?什么叫负反馈?7、什么叫定值控制系统?对定值控制系统来说,系统的输入量是什么?举例说明日常生活中的定值控制系统。
8.什么叫随动控制系统?对随动控制系统来说,系统的输入量是什么?举例说明日常生活中的随动控制系统。
9.、对一个实际控制系统如何实现负反馈?10.说明汽包锅炉有哪些被控制量?相应的控制量、控制机构有哪些?锅炉运行过程中被控制量可能会受到哪些扰动?11.控制过程的基本形式有哪几种?它们各有什么特点?如何根据控制过程曲线来检验控制系统是否满足基本要求?哪种控制过程的基本形式符合热工控制过程的要求,给出稳定性指标的范围。
12.通常从哪三个方面衡量自动调节系统的工作品质,表示调节系统的工作品质的指标有哪几个?如何兼顾这些指标?13.举出反馈控制系统的实例,指出被控制量、控制量、控制机构、给定值、扰动,画出控制系统的示意图。
14.水位自动控制系统的两种方案如下图所示,在运行中,希望水位高度H维持不变:(1)说明各系统的工作原理。
(2)画出各系统的方框图,并说明控制对象、被控制量、给定值、扰动各是什么?(3)试说明两系统各属于何种结构的控制方式。
(4)当水箱出口水流量q2变化时,各系统能否使水位高度保持不变?试从原理上定性说明。
第二章控制对象的动态特性1.为什么要研究对象动态特性?2.热工控制对象一般有哪几种类型?每种类型的特点是什么?写出相对应的传递函数。
3.热工控制对象的特征参数有哪些?是如何定义的,物理意义是什么?4.写出表示有自平衡能力对象动态特性的两套特征参数和它们之间的关系。