极坐标和参数方程基础知识及重点题型
- 格式:doc
- 大小:937.00 KB
- 文档页数:9
极坐标与参数方程1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换⎩⎨⎧=='y y xx μλϕ:的作用下,点P(x,y)对应到点()y x p '',,称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.例如:122=+y x 在变换⎩⎨⎧='='yy xx 23:ϕ(即横坐标伸长为原来3倍,纵坐标伸长为原来的2)得到14922=+y x 2.极坐标系的概念 (1)极坐标系如图所示,定点O 叫做 ,自极点O 引一条射线Ox ,叫做 ;再选定一个长度单位,一个角度单位及其正方向,这样就建立了一个极坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离OM 叫做点M 的 ,记为ρ;以极轴Ox 为始边,射线OM 为终边的角MOx ∠叫做点M 的 ,记为θ.有序数对 叫做点M 的极坐标,记作()θρ,M .一般地,不作特殊说明时,我们认为可取任意实数.3.极坐标和直角坐标的互化互化公式:设M 是坐标平面内任意一点,它的直角坐标是()y x ,,极坐标是()θρ, (0≥ρ),于是极坐标与直角坐标的互化公式如表:二、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标y x ,都是某个变数t 的函数①⎩⎨⎧==)()(t g y t f x ,并且对于t 的每一个允许值,由方程组①所确定的点()y x M ,都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数y x ,的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程. 3.常见曲线的参数方程①经过点()000,y x M ,倾斜角为α的直线l 的普通方程为 ,参数方程为 。

极坐标和参数方程知识点+典型例题及其详解知识点回顾(一)曲线的参数方程的定义:在取定的坐标系中,如果曲线上任意一点的坐标x 、y 都是某个变数t 的函数,即 ⎩⎨⎧==)()(t f y t f x并且对于t 每一个允许值,由方程组所确定的点M (x ,y )都在这条曲线上,那么方程组就叫做这条曲线的参数方程,联系x 、y 之间关系的变数叫做参变数,简称参数. (二)常见曲线的参数方程如下:1.过定点(x 0,y 0),倾角为α的直线:ααsin cos 00t y y t x x +=+= (t 为参数)其中参数t 是以定点P (x 0,y 0)为起点,对应于t 点M (x ,y )为终点的有向线段PM 的数量,又称为点P 与点M 间的有向距离.根据t 的几何意义,有以下结论.错误!.设A 、B 是直线上任意两点,它们对应的参数分别为t A 和t B ,则AB =A B t t -=B A A B t t t t ⋅--4)(2. 错误!.线段AB 的中点所对应的参数值等于2BA t t +. 2.中心在(x 0,y 0),半径等于r 的圆:θθsin cos 00r y y r x x +=+= (θ为参数)3.中心在原点,焦点在x 轴(或y 轴)上的椭圆:θθsin cos b y a x == (θ为参数) (或 θθsin cos a y b x ==)中心在点(x0,y0)焦点在平行于x 轴的直线上的椭圆的参数方程为参数)ααα(.sin ,cos 00⎩⎨⎧+=+=b y y a x x4.中心在原点,焦点在x 轴(或y 轴)上的双曲线:θθtg sec b y a x == (θ为参数) (或 θθec a y b x s tg ==)5.顶点在原点,焦点在x 轴正半轴上的抛物线:pty pt x 222== (t 为参数,p >0)直线的参数方程和参数的几何意义过定点P (x 0,y 0),倾斜角为α的直线的参数方程是 ⎩⎨⎧+=+=ααsin cos 00t y y t x x (t 为参数). (三)极坐标系1、定义:在平面内取一个定点O ,叫做极点,引一条射线Ox,叫做极轴,再选一个长度单位和角度的正方向(通常取逆时针方向)。
极坐标及参数方程一、极坐标知识点 1.极坐标系的概念:2.有序数对),(θρ叫做点M 的极坐标,记为),(θρM . 3.极坐标与直角坐标的互化: (1)互化的前提条件①极坐标系中的极点与直角坐标系中的原点重合; ②极轴与x 轴的正半轴重合 ③两种坐标系中取相同的长度单位. (2)互化公式二、参数方程知识点(1)圆222)()(r b y a x =-+-的参数方程可表示为 )(.sin ,cos 为参数θθθ⎩⎨⎧+=+=r b y r a x .(2)椭圆12222=+b y a x )0(>>b a 的参数方程可表示为)(.sin ,cos 为参数ϕϕϕ⎩⎨⎧==b y a x .(3)经过点),(o o O y x M ,倾斜角为α的直线l 的参数方程可表示为⎩⎨⎧+=+=.sin ,cos o o ααt y y t x x (t 为参数).三、点到直线的距离公式、直线与圆、圆与圆位置关系 极坐标方程典型例题1.点()22-,的极坐标为 。
2.已知圆C :22(1)(3)1x y ++-=,则圆心C 的极坐标为_______(0,02)ρθπ>≤<3.若曲线的极坐标方程为ρ=2sin θ+4cos θ,以极点为原点,极轴为x 轴正半轴建立直角坐标系,则该曲线的直角坐标方程为________.4.化极坐标方程2cos 0ρθρ-=为直角坐标方程为( )A .201y y +==2x 或B .1x =C .201y +==2x 或xD .1y = 5.极坐标ρ=cos(θπ-4)表示的曲线是( )A.双曲线B.椭圆C.抛物线D.圆6.极点到直线()cos sin 3ρθθ+________ 。
7.在极坐标系中,点3(2,)2π到直线l :3cos 4sin 3ρθρθ-=的距离为 .8.在极坐标系中,点π(1,)2P 到曲线π3:cos()242l ρθ+=上的点的最短距离为 .9.已知直线4sin cos :=-θρθρl ,圆θρcos 4:=C ,则直线l 与圆C 的位置关系是________.(相交或相切或相离?)10.在极坐标系中,已知圆ρ=2cosθ与直线3ρcosθ+4ρsinθ+a=0相切,求实数a 的值。
一、复习提问1、 极坐标系和直角坐标系有什么区别?学校老师课堂如何讲解极坐标参数方程的?2、 如何把极坐标系转化为直角坐标系?答:将极坐标的极点O 作为直角坐标系的原点,将极坐标的极轴作为直角坐标系x 轴的正半轴。
如果点P 在直角坐标系下的坐标为),(y x ,在极坐标系下的坐标为),(θρ,则有下列关系成立:ρθx=cos ,ρθy=sin ,3、 参数方程⎩⎨⎧==θθsin cos r y r x 表示什么曲线?4、 圆222)()(r b y a x =-+- 的参数方程是什么?5、 极坐标系的定义是什么?答:取一个定点O ,称为极点,作一水平射线Ox ,称为极轴,在Ox 上规定单位长度,这样就组成了一个极坐标系设ρ=OP OP ,又θ=∠xOP .ρ和θ的值确定了,则P 点的位置就确定了。
ρ叫做P 点的极半径,θ叫做P 点的极角,),(θρ叫做P 点的极坐标(规定ρ写在前,θ写在后)。
显然,每一对实数),(θρ决定平面上一个点的位置. 6、参数方程的意义是什么?二、题型与方法归纳1、 题型与考点(1){极坐标与普通方程的互相转化极坐标与直角坐标的互相转化(2){参数方程与普通方程互化参数方程与直角坐标方程互化(3){利用参数方程求值域参数方程的几何意义2、解题方法及步骤 (1)、参数方程与普通方程的互化化参数方程为普通方程的基本思路是消去参数,常用的消参方法有代入消去法、加减消去法、恒等式(三角的或代数的)消去法;化普通方程为参数方程的基本思路是引入参数,即选定合适的参数t ,先确定一个关系()x f t =(或()y g t =,再代入普通方程(),0F x y =,求得另一关系()y g t =(或()x f t =).一般地,常选择的参数有角、有向线段的数量、斜率,某一点的横坐标(或纵坐标)例1、方程⎪⎩⎪⎨⎧+=-=--tt tt y x 2222(t 为参数)表示的曲线是( )A. 双曲线B.双曲线的上支C.双曲线的下支D.圆解析:注意到2t t 与2t-互为倒数,故将参数方程的两个等式两边分别平方,再相减,即可消去含t 的项,4)22()22(2222-=+--=---tttty x ,即有422=+y x ,又注意到02>t ,222222=⋅≥+--t t t t ,即2≥y ,可见与以上参数方程等价的普通方程为)2(422≥=-y y ,显然它表示焦点在y 轴上,以原点为中心的双曲线的上支,选B.练习1、与普通方程210x y +-=等价的参数方程是( )(t 为能数)解析:所谓与方程210x y +-=等价,是指若把参数方程化为普通方程后不但形式一致而且,x y 的变化范围也对应相同,按照这一标准逐一验证即可破解.对于A 化为普通方程为[][]2101101x y x y +-=∈-∈,,,,;对于B 化为普通方程为210(1]x y x R y +-=∈∈-∞,,,; 对于C 化为普通方程为210[0)(1]x y x y +-=∈+∞∈-∞,,,,; 对于D 化为普通方程为[][]2101101x y x y +-=∈-∈,,,,.而已知方程为210(1]x y x R y +-=∈∈-∞,,,,显然与之等价的为B .练习2、设P 是椭圆222312x y +=上的一个动点,则2x y +的最大值是 ,最小值为 .分析:注意到变量),(y x 的几何意义,故研究二元函数2x y +的最值时,可转化为几何问题.若设2x y t +=,则方程2x y t +=表示一组直线,(对于t 取不同的值,方程表示不同的直线),显然),(y x 既满足222312x y +=,又满足2x y t +=,故点),(y x 是方程组2223122x y x y t⎧+=⎨+=⎩的公共解,依题意得直线与椭圆总有公共点,从而转化为研究消无后的一⎩⎨⎧==t y tx A 2cos sin ⎩⎨⎧-==ty t x B 2tan 1tan ⎩⎨⎧=-=ty t x C 1⎩⎨⎧==ty t x D 2sin cos元二次方程的判别式0∆≥问题.解析:令2x y t +=,对于(),x y 既满足222312x y +=,又满足2x y t +=,故点),(y x 是方程组2223122x y x y t⎧+=⎨+=⎩的公共解,依题意得()221182120y t y t -⋅+-=,由()22644112120t t ∆=-⨯⨯-≥,解得:t ≤≤所以2x y +,最小值为(2)、极坐标与直角坐标的互化利用两种坐标的互化,可以把不熟悉的问题转化为熟悉的问题,这二者互化的前提条件是(1)极点与原点重合;(2)极轴与x 轴正方向重合;(3)取相同的单位长度.设点P 的直角坐标为),(y x ,它的极坐标为),(θρ,则⎩⎨⎧==θρθρsin cos y x 或⎪⎩⎪⎨⎧=+=x yy x θρtan 222;若把直角坐标化为极坐标,求极角θ时,应注意判断点P 所在的象限(即角θ的终边的位置),以便正确地求出角θ.例2、极坐标方程52sin42=⋅θρ表示的曲线是( )A. 圆B. 椭圆C. 双曲线的一支D. 抛物线分析:这类问题需要将极坐标方程转化为普通方程进行判断.解析:由21cos 4sin422cos 522θθρρρρθ-⋅=⋅=-=,化为直角坐标系方程为25x =,化简得22554y x =+.显然该方程表示抛物线,故选D.练习1、已知直线的极坐标方程为22)4sin(=+πθρ,则极点到该直线的距离是解析:极点的直角坐标为)0,0(O ,对于方程22)cos sin (22)4sin(=+=+θρθρπθρ, 可得1sin cos =+θρθρ,化为直角坐标方程为10x y +-=,因此点到直线的距离为2练习2、极坐标方程0cos 2=-ρθρ转化成直角坐标方程为( )A .1022==+y y x 或 B .1x = C .1022==+x y x 或 D .1y =分析:极坐标化为直解坐标只须结合转化公式进行化解. 解析:0cos 2=-ρθρ,022=+=⇒y x ρ,或0cos ==x θρ,因此选C.练习3、点M的直角坐标是(-,则点M 的极坐标为( ) A .(2,)3πB .(2,)3π-C .2(2,)3πD .(2,2),()3k k Z ππ+∈解析:2(2,2),()3k k Z ππ+∈都是极坐标,因此选C. (3)、参数方程与直角坐标方程互化例3:已知曲线1C 的参数方程为⎪⎩⎪⎨⎧=+-=θθsin 10cos 102y x (θ为参数),曲线2C 的极坐标方程为θθρsin 6cos 2+=.(1)将曲线1C 的参数方程化为普通方程,将曲线2C 的极坐标方程化为直角坐标方程; (2)曲线1C ,2C 是否相交,若相交请求出公共弦的长,若不相交,请说明理由.解:(1)由⎪⎩⎪⎨⎧=+-=θθsin 10cos 102y x 得10)2(22=++y x ,∴曲线1C 的普通方程为10)2(22=++y x ,∵θθρsin 6cos 2+=,θρθρρsin 6cos 22+=∴, ∵222y x +=ρ,θρcos =x ,θρsin =y , ∴y x y x 6222+=+,即10)2(22=++y x , ∴曲线2C 的直角坐标方程为10)2(22=++y x ;(2)∵圆1C 的圆心为)0,2(-,圆2C 的圆心为)3,1(,∴10223)30()12(C 2221<=-+--=C∴两圆相交,设相交弦长为d ,因为两圆半径相等,所以公共弦平分线段21C C ∴222)10()223()2(=+d ,∴22=d ,∴公共弦长为22练习1、坐标系与参数方程. 已知曲线C :⎩⎨⎧+=+=θθsin 21cos 23y x (θ为参数,πθ20≤≤),(Ⅰ)将曲线化为普通方程;(Ⅱ)求出该曲线在以直角坐标系原点为极点,x 轴非负半轴为极轴的极坐标系下的极坐标方程.解析:(Ⅰ)023222=--+y x y x(Ⅱ)()θθρsin cos 32+=(4)利用参数方程求值域 例题4、在曲线1C :⎩⎨⎧=+=)y x 为参数θθθ(sin cos 1上求一点,使它到直线2C:12(112x t t y t⎧=-⎪⎪⎨⎪=-⎪⎩为参数)的距离最小,并求出该点坐标和最小距离. 解:直线2C 化成普通方程是122--+y x ,设所求的点为()θθsin ,cos 1+P , 则C 到直线2C 的距离2|122sin cos 1|-+++=θθd |2)4sin(|++=πθ,当234ππθ=+时,即45πθ=时,d 取最小值1 ,此时,点P 的坐标是)22,221(--.练习1、在平面直角坐标系xOy 中,动圆08cos 7sin 6cos 8222=++--+θθθy x y x (R ∈θ)的圆心为),(y x P ,求y x -2的取值范.解:由题设得⎩⎨⎧==θθsin 3cos 4y x (θ为参数,R ∈θ),于是)cos(73sin 3cos 82ϕθθθ+=-=-y x ,所以73273≤-≤-y x .练习2、已知曲线C 的极坐标方程是θρsin 2=,设直线L 的参数方程是⎪⎪⎩⎪⎪⎨⎧=-=t y t x 5453(t为参数).(Ⅰ)将曲线C 的极坐标方程转化为直角坐标方程;(Ⅱ)设直线L 与x 轴的交点是M ,N 曲线C 上一动点,求||MN 的最大值.解:(1)曲线C 的极坐标方程可化为: θρρsin 22=又222ρ=+y x , θρcos =x ,θρsin =y . 所以,曲线C 的直角坐标方程为:0222=-+y y x .(2)将直线L 的参数方程化为直角坐标方程得:)2(34--=x y , 令0=y 得2=x 即M 点的坐标为)0,2(,又曲线C 为圆,圆C 的圆心坐标为)1,0(,半径1=r , 则5||=MC ,15||||+=+≤∴r MC MN .(5)直线参数方程中的参数的几何意义例5、已知直线l 经过点)1,1(P ,倾斜角6πα=,①写出直线l 的参数方程;②设l 与圆422=+y x 相交与两点,A B ,求点P 到,A B 两点的距离之积.解 (1)直线的参数方程为1cos 61sin 6x t y t ππ⎧=+⎪⎪⎨⎪=+⎪⎩,即312112x t y t⎧=+⎪⎪⎨⎪=+⎪⎩.(2)把直线312112x t y t ⎧=+⎪⎪⎨⎪=+⎪⎩代入422=+y x , 得22231(1)(1)4,(31)2022t t t t +++=++-=,122t t =-, 则点P 到,A B 两点的距离之积为2.练习1、求直线⎪⎪⎩⎪⎪⎨⎧--=+=ty t x 531541(为参数t )被曲线2cos()4πρθ=+所截的弦长.解:将方程⎪⎪⎩⎪⎪⎨⎧--=+=ty t x 531541,2)4πρθ=+分别化为普通方程:3410x y ++=,022=+-+y x y x ,圆心)21,21(-C ,半径为22, 圆心到直线的距离101=d ,弦长571001212222=-=-=d r l .(6)、参数方程与极坐标的简单应用参数方程和极坐标的简单应用主要是:求几何图形的面积、曲线的轨迹方程或研究某些函数的最值问题.例6、已知ABC ∆的三个顶点的极坐标分别为)3,5(πA ,)2,5(πB ,)3,34(π-C , 判断ABC ∆的形状,并计算其面积.分析:判断ABC ∆的形状,就需要计算三角形的边长或角,在本题中计算边长较为容易,不妨先计算边长.解析:如图,对于3π=∠AOB ,65π=∠BOC ,65π=∠AOC , 又5||||==OB OA ,34||=OC ,由余弦定理得:2222cos AC OA OC OA OC AOC=+-⋅⋅∠(225525cos6π=+-⨯⨯133=, 133||=∴AC ,同理133||=BC ,||||BC AC =∴, 所以ABC ∆为等腰三角形,又5||||||===OB OA AB , 所以AB 边上的高h ==,152ABC S ∆∴==.练习1、如图,点A 在直线5=x 上移动,等腰OPA ∆的顶角OPA ∠为0120(O ,P ,A按顺时针方向排列),求点P 的轨迹方程.解析:取O 为极点,x 正半轴为极轴,建立极坐标系,则直线5=x 的极坐标方程为cos 5ρθ=, 设),(00θρA ,),(θρP ,因点A 在直线cos 5ρθ=上,00cos 51ρθ∴=<> OPA ∆为等腰三角形,且0120=∠OPAA ,而ρ=||OP ,0||ρ=OA ,以及30POA ∠=︒,00302ρθθ∴==-︒<>,且,把<2>代入<1>, 得点P ()cos 305θ-︒=.三、趁热打铁1.把方程1xy =化为以t 参数的参数方程是( )A .1212x t y t -⎧=⎪⎨⎪=⎩B .sin 1sin x t y t =⎧⎪⎨=⎪⎩C .cos 1cos x t y t =⎧⎪⎨=⎪⎩D .tan 1tan x t y t =⎧⎪⎨=⎪⎩ 解析:D , 1xy =,x 取非零实数,而A ,B ,C 中的x 的范围有各自的限制.BAO x Cy P AO x2.曲线25()12x tt y t =-+⎧⎨=-⎩为参数与坐标轴的交点是( )A .21(0,)(,0)52、 B .11(0,)(,0)52、 C .(0,4)(8,0)-、 D .5(0,)(8,0)9、 解析:B ,当0x =时,25t =,而12y t =-,即15y =,得与y 轴的交点为1(0,)5; 当0y =时,12t =,而25x t =-+,即12x =,得与x 轴的交点为1(,0)2.3.直线12()2x tt y t=+⎧⎨=+⎩为参数被圆229x y +=截得的弦长为( )A .125 BCD解析:B11221x x t y t y ⎧=⎪=+⎧⎪⇒⎨⎨=+⎩⎪=⎪⎩,把直线122x t y t =+⎧⎨=+⎩代入 229x y +=得222(12)(2)9,5840t t t t +++=+-=,12125t t -===12t -=4.若点(3,)P m 在以点F 为焦点的抛物线24()4x t t y t⎧=⎨=⎩为参数上,则PF 等于( ) A .2 B .3 C .4 D .5解析:C 抛物线为24y x =,准线为1x =-,PF 为(3,)P m 到准线1x =-的距离,即为4.5.已知曲线22()2x pt t p y pt⎧=⎨=⎩为参数,为正常数上的两点,M N 对应的参数分别为12,t t 和,120t t +=且,那么MN =_______________。

高中数学极坐标与参数方程知识点汇编及题型汇总编者:邬小军【知识汇编】参数方程:直线参数方程:00cos ()sin x x t t y y t θθ=+⎧⎨=+⎩为参数00(,)x y 为直线上的定点,t 为直线上任一点(,)x y 到定点00(,)x y 的数量;圆锥曲线参数方程:圆的参数方程:cos ()sin x a r y b r θθθ=+⎧⎨=+⎩为参数(a,b)为圆心,r 为半径; 椭圆22221x y a b+=的参数方程是cos ()sin x a y b θθθ=⎧⎨=⎩为参数; 双曲线2222-1x y a b =的参数方程是sec ()tan x a y b φθφ=⎧⎨=⎩为参数; 抛物线22y px =的参数方程是22()2x pt t y pt⎧=⎨=⎩为参数 极坐标与直角坐标互化公式:若以直角坐标系的原点为极点,x 轴正半轴为极轴建立坐标系,点P 的极坐标为(,)ρθ,直角坐标为(,)x y ,则cos x ρθ=,sin y ρθ=,222x y ρ=+,tan yx θ=。
【题型1】参数方程和极坐标基本概念1.点M的直角坐标是(-,则点M 的极坐标为(C )A .(2,)3πB .(2,)3π-C .2(2,)3πD .(2,2),()3k k Z ππ+∈2.圆5cos ρθθ=-的圆心坐标是(A )A .4(5,)3π--B .(5,)3π-C .(5,)3πD .5(5,)3π- 3.已知P 为半圆C :(θ为参数,πθ≤≤0)上的点,点A 的坐标为(1,0),O 为坐标原点,点M 在射线OP 上,线段OM 与C 的弧的长度均为3π。
1)以O 为极点,x 轴的正半轴为极轴建立极坐标系,求点M 的极坐标; 2)求直线AM 的参数方程。
解:1)由已知,M 点的极角为3π,且M 点的极径等于3π,故点M 的极坐标为(3π,3π).2)M点的直角坐标为(6π,A (0,1),故直线AM 的参数方程为1(1)6x t y π⎧=+-⎪⎪⎨⎪⎪⎩(t为参数)4.已知曲线C的参数方程为⎪⎩⎪⎨⎧+=+=ααsin 51cos 52y x (α为参数),以直角坐标系原点为极点,Ox 轴正半轴为极轴建立极坐标系。
1. 极坐标及参数方程知识点1.伸缩变换:设点),(y x P 是平面直角坐标系中旳任意一点,在变换⎩⎨⎧>⋅='>⋅=').0(,y y 0),(x,x :μμλλϕ旳作用下,点),(y x P 对应到点),(y x P ''',称ϕ为平面直角坐标系中旳坐标伸缩变换,简称伸缩变换。
2.极坐标系旳概念:在平面内取一种定点O ,叫做极点;自极点O 引一条射线Ox 叫做极轴;再选定一种长度单位、一种角度单位(一般取弧度)及其正方向(一般取逆时针方向),这样就建立了一种极坐标系。
3.点M 旳极坐标:设M 是平面内一点,极点O 与点M 旳距离||OM 叫做点M 旳极径,记为ρ;以极轴Ox 为始边,射线OM 为终边旳xOM ∠叫做点M 旳极角,记为θ。
有序数对),(θρ叫做点M 旳极坐标,记为),(θρM .极坐标),(θρ与)Z )(2,(∈+k k πθρ表达同一种点。
极点O 旳坐标为)R )(,0(∈θθ. 4.若0<ρ,则0>-ρ,规定点),(θρ-与点),(θρ有关极点对称,即),(θρ-与),(θπρ+表达同一点。
假如规定πθρ20,0≤≤>,那么除极点外,平面内旳点可用唯一旳极坐标),(θρ表达;同步,极坐标),(θρ表达旳点也是唯一确定旳。
5.极坐标与直角坐标旳互化:6。
圆旳极坐标方程:在极坐标系中,以极点为圆心,r 为半径旳圆旳极坐标方程是 r =ρ;在极坐标系中,以 )0,(a C )0(>a 为圆心, a 为半径旳圆旳极坐标方程是 θρcos 2a =; 在极坐标系中,以 )2,(πa C )0(>a 为圆心,a 为半径旳圆旳极坐标方程是θρsin 2a =;7.在极坐标系中,)0(≥=ραθ表达以极点为起点旳一条射线;)R (∈=ραθ表达过极点旳一条直线.在极坐标系中,过点)0)(0,(>a a A ,且垂直于极轴旳直线l 旳极坐标方程是a =θρcos .8.参数方程旳概念:在平面直角坐标系中,假如曲线上任意一点旳坐标y x ,都是某个变数t 旳函数⎩⎨⎧==),(),(t g y t f x 并且对于t 旳每一种容许值,由这个方程所确定旳点),(y x M 都在这条曲线上,那么这个方程就叫做这条曲线旳参数方程,联络变数y x ,旳变数t 叫做参变数,简称参数。
极坐标及参数方程知识点及例题一、极坐标知识点1.极坐标系的概念:在平面内取一个定点 O,从 O 引一条射线 Ox,选定一个单位长度以及计算角度的正方向 (通常取逆时针方向为正方向 ),这样就建立了一个极坐标系, O 点叫做极点,射线 Ox 叫做极轴①极点;②极轴;③长度单位;④角度单位和它的正方向,构成了极坐标系的四要素,缺一不可 .2.点 M 的极坐标:设 M 是平面内一点,极点 O 与点 M 的距离| OM |叫做点 M 的极径,记为;以极轴Ox 为始边,射线OM 为终边的xOM 叫做点M 的极角,记为。
有序数对(,) 叫做点M 的极坐标,记为M ( ,) .极坐标( , )与( , 2k )(k Z) 表示同一个点。
极点O 的坐标为(0, )( R ) .3.极坐标与直角坐标的互化:(1)互化的前提条件①极坐标系中的极点与直角坐标系中的原点重合;②极轴与 x 轴的正半轴重合③两种坐标系中取相同的长度单位.(2)互化公式2 x2 y 2 , x cos ,y sin , tan y( x 0) x4.曲线的极坐标方程:1.直线的极坐标方程:若直线过点M ( 0 , 0 ) ,且极轴到此直线的角为,则它的方程为:sin()0 sin(0)几个特殊位置的直线的极坐标方程( 1)直线过极点(2)直线过点M(a,0)且垂直于极轴(3)直线过M (b,) 且平2 行于极轴方程:( 1)(R )或写成及(2)cos a(3)ρsinθ=b2.圆的极坐标方程: 若圆心为 M ( 0 , 0 ) ,半径为 r 的圆方程为:22 0 cos()2 r 2几个特殊位置的圆的极坐标方程( 1)当圆心位于极点, r 为半径 (2)当圆心位于 C (a,0) (a>0),a 为半径 ( 3) 当圆心位于 C(a,) (a 0) , a 为半径2 方程: (1) r (2)2acos (3)2asin5.在极坐标系中, (0) 表示以极点为起点的一条射线;(R)表示过极点的一条直线 .极坐标方程典型例题考点一 极坐标与直角坐标的互化1.点 M 的直角坐标是 ( 1, 3) ,则点 M 的极坐标为( )A . (2,)B . (2,)C .(2,2)D . (2, 2k),( k Z) 33332.点 2, 2 的极坐标为。
极坐标与参数方程知识点、题型总结一、伸缩变换:点是平面直角坐标系中的任意一点,在变换),(y x P 的作用下,点对应到点,称伸缩变换⎩⎨⎧>⋅='>⋅=').0(,y y 0),(x,x :μμλλϕ),(y x P ),(y x P '''一、1、极坐标定义:M 是平面上一点,表示OM 的长度,是,则有序实数实ρθMOx ∠数对,叫极径,叫极角;一般地,,。
,点P 的直角坐标、(,)ρθρθ[0,2)θπ∈0ρ≥极坐标分别为(x ,y )和(ρ,θ)2、直角坐标极坐标 2、极坐标直角坐标⇒cos sin x y ρθρθ=⎧⎨=⎩⇒222tan (0)x y yx xρθ⎧=+⎪⎨=≠⎪⎩3、求直线和圆的极坐标方程:方法一、先求出直角坐标方程,再把它化为极坐标方程方法二、(1)若直线过点M (ρ0,θ0),且极轴到此直线的角为α,则它的方程为:ρsin(θ-α)=ρ0sin(θ0-α)(2)若圆心为M (ρ0,θ0),半径为r 的圆方程为ρ2-2ρ0ρcos(θ-θ0)+ρ02-r 2=0二、参数方程:(一).参数方程的概念:在平面直角坐标系中,如果曲线上任意一点的坐标都是某个变数的函数 并且对于的每一个允许值,由这个方程所确y x ,t ⎩⎨⎧==),(),(t g y t f x t 定的点都在这条曲线上,那么这个方程就叫做这条曲线的参数方程,联系变数),(y x M 的变数叫做参变数,简称参数。
相对于参数方程而言,直接给出点的坐标间关系的y x ,t 方程叫做普通方程。
(二).常见曲线的参数方程如下:直线的标准参数方程1、过定点(x 0,y 0),倾角为α的直线:(t 为参数)ααsin cos 00t y y t x x +=+=(1)其中参数t 的几何意义:点P (x 0,y 0),点M 对应的参数为t ,则PM =|t| (2)直线上对应的参数是。
极坐标与参数方程知识点、题型总结知识点和题型总结:一、伸缩变换伸缩变换是指点P(x,y)在变换作用下对应到点P'(x',y'),其中x' = λx (λ。
0),y' = μy (μ。
0)。
这个变换称为伸缩变换。
二、极坐标和直角坐标的转换1、极坐标定义在平面上,点M的极坐标表示为(ρ,θ),其中ρ表示OM 的长度,θ表示∠MOx的角度,且θ∈[0,2π),ρ≥0.点P的直角坐标为(x,y),极坐标为(ρ,θ)。
2、直角坐标转换为极坐标x = ρcosθ,y = ρsinθ。
3、极坐标转换为直角坐标ρ = √(x²+y²),tanθ = y/x (x≠0),x = ρcosθ,y = ρsinθ。
4、直线和圆的极坐标方程方法一:先求出直角坐标方程,再把它化为极坐标方程。
方法二:1)若直线过点M(ρ,θ),且极轴到此直线的角为α,则它的方程为:ρsin(θ-α) = ρsin(θ-α)。
2)若圆心为M(ρ,θ),半径为r的圆方程为ρ²-2ρrcos(θ-θ)+ρ²-r² = 0.三、参数方程1、参数方程的概念在平面直角坐标系中,如果曲线上任意一点的坐标x,y都是某个变数t的函数,且对于t的每一个允许值,由这个方程所确定的点M(x,y)都在这条曲线上,那么这个方程就叫做这条曲线的参数方程,联系变数x,y的变数t叫做参变数,简称参数。
相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程。
2、常见曲线的参数方程1)直线的标准参数方程过定点(x,y),倾角为α的直线:x = x+tcosα,y = y+tsinα (t为参数)。
其中参数t的几何意义是点P(x,y),点M对应的参数为t,则PM = |t|。
直线上P1,P2对应的参数是t1,t2.|P1P2| = |t1-t2| = √((x1-x2)²+(y1-y2)²)。
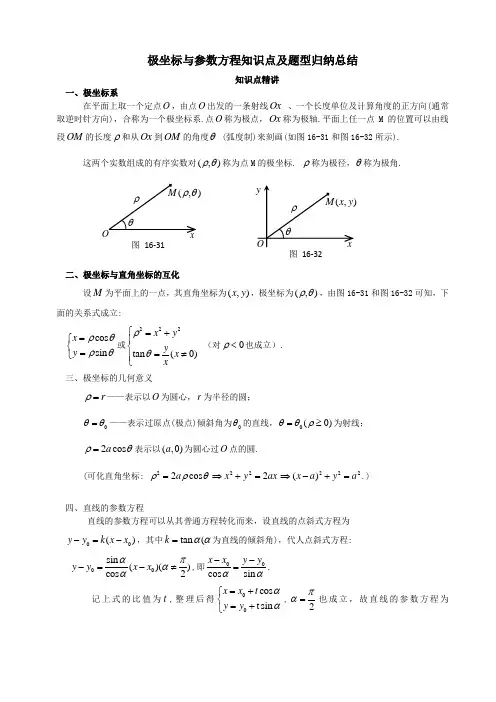
极坐标与参数方程知识点及题型归纳总结知识点精讲一、极坐标系在平面上取一个定点O ,由点O 出发的一条射线Ox 、一个长度单位及计算角度的正方向(通常取逆时针方向),合称为一个极坐标系.点O 称为极点,Ox 称为极轴.平面上任一点M 的位置可以由线段OM 的长度ρ和从Ox 到OM 的角度θ (弧度制)来刻画(如图16-31和图16-32所示). 这两个实数组成的有序实数对(,)ρθ称为点M 的极坐标. ρ称为极径,θ称为极角.二、极坐标与直角坐标的互化设M 为平面上的一点,其直角坐标为(,)x y ,极坐标为(,)ρθ,由图16-31和图16-32可知,下面的关系式成立:cos sin x y ρθρθ=⎧⎨=⎩或222tan (0)x y yx x ρθ⎧=+⎪⎨=≠⎪⎩(对0ρ<也成立). 三、极坐标的几何意义r ρ=——表示以O 为圆心,r 为半径的圆;0θθ=——表示过原点(极点)倾斜角为0θ的直线,0(0)θθρ=≥为射线;2cos a ρθ=表示以(,0)a 为圆心过O 点的圆.(可化直角坐标: 22cos a ρρθ=222x y ax ⇒+=222()x a y a ⇒-+=.)四、直线的参数方程直线的参数方程可以从其普通方程转化而来,设直线的点斜式方程为00()y y k x x -=-,其中tan (k αα=为直线的倾斜角),代人点斜式方程:00sin ()()cos 2y y x x απαα-=-≠,即00cos sin x x y y αα--=. 记上式的比值为t ,整理后得00cos t sin x x t y y αα=+⎧⎨=+⎩,2πα=也成立,故直线的参数方程为00cos t sin x x t y y αα=+⎧⎨=+⎩(t 为参数,α为倾斜角,直线上定点000(,)M x y ,动点(,)M x y ,t 为0M M 的数量,向上向右为正(如图16-33所示).五、圆的参数方程若圆心为点00(,)M x y ,半径为r ,则圆的参数方程为00cos (02)sin x x r y y r θθπθ=+⎧≤≤⎨=+⎩.六、椭圆的参数方程椭圆2222C :1x y a b +=的参数方程为cos sin x a y b θθ=⎧⎨=⎩(θ为参数,(02)θπ≤≤).七、双曲线的参数方程双曲线2222C :1x y a b -=的参数方程为sec tan x a y b θθ=⎧⎨=⎩(,)2k k πθπ≠+∈Z .八、抛物线的参数方程抛物线22y px =的参数方程为222x pt y pt⎧=⎨=⎩(t 为参数,参数t 的几何意义是抛物线上的点与顶点连线的斜率的倒数).题型归纳即思路提示题型1 极坐标方程化直角坐标方程 思路提示对于极坐标方程给出的问题解答一般都是通过化为直角坐标方程,利用直角坐标方程求解.这里需注意的是极坐标系与直角坐标系建立的对应关系及其坐标间的关系cos sin x y ρθρθ=⎧⎨=⎩. 例16.7 在极坐标系中,圆4sin ρθ=的圆心到直线6πθ=(ρ∈R )的距离是 .分析 将极坐标方程转化为平面直角坐标系中的一般方程求解.解析 极坐标系中的圆4sin ρθ=转化为平面直角坐标系中的一般方程为224x y y +=,即22(2)4x y +-=,其圆心为(0,2),直线6πθ=转化为平面直角坐标系中的方程为:y x =,即0x =.圆心(0,2)到直线0x ==. 变式1 已知曲线12,C C 的极坐标方程分别为cos 3ρθ=,4cos ρθ=,(0,0)2πρθ≥≤<,则曲线1C 与2C 交点的极坐标为 .变式2 ⊙1O 和⊙2O 的极坐标方程分别为4cos ρθ=,4sin ρθ=-.(1)把⊙1O 和⊙2O 的极坐标方程分别化为直角坐方程; (2)求经过⊙1O 和⊙2O 交点的直线的直角坐标方程.变式3已知一个圆的极坐标方程是5sin ρθθ=-,求此圆的圆心和半径. 例16.8 极坐标方程(1)()0(0)ρθπρ--=≥表示的图形是( )A. 两个圆B.两条直线C.一个圆和一条射线D.一条直线和一条射线分析 将极坐标方程化为直角坐标方程.解析 因为(1)()0(0)ρθπρ--=≥,所以1ρ=或θπ=(0)ρ≥.11ρ=⇒=,得221x y +=,表示圆心在原点的单位圆;(0)θπρ=≥表示x 轴的负半轴,是一条射线.故选C.变式1 极坐标方程cos ρθ=和参数方程123x ty t =--⎧⎨=+⎩(t 参数)所表示的图形分别是( )A.圆、直线B.直线、圆C.圆、圆D.直线、直线 变式2 在极坐标系中,点(2,)6P π-到直线:sin()16l πρθ-=的距离是 .变式3 直线2cos 1ρθ=与圆2cos ρθ=相交的弦长为 .题型2 直角坐标方程化为极坐标方程思路提示如果题目中已知的曲线为直角坐标方程,而解答的问题是极坐标系下的有关问题,这里要利用直角坐标与极坐标关系式cos sin x y ρθρθ=⎧⎨=⎩,将直角坐标方程化为极坐标方程.例16.9 在直角坐标系xOy 中,圆1C :224x y +=,圆2C :22(2)4x y -+=.(1)在以O 为极点,x 轴为极轴的极坐标系中,分别写出圆1C , 2C 的极坐标方程,并求出圆1C , 2C 的交点坐标(用极坐标表示);(2)求出1C 与2C 的公共弦的参数方程.解析 (1)圆1C 的极坐标方程为2ρ=,圆2C 的极坐标方程为4cos ρθ=.24cos ρρθ=⎧⎨=⎩解得2ρ=,3πθ=±,故圆1C 与圆2C 的交点的坐标为(2,),(2,)33ππ-. 注:极坐标系下点的表示不唯一.(2)解法一:由cos sin x y ρθρθ=⎧⎨=⎩,得圆1C 与圆2C 的交点的坐标分别为.故圆1C 与2C 的公共弦的参数方程为1(x t y t=⎧≤≤⎨=⎩.解法二: 将1x =代入cos sin x y ρθρθ=⎧⎨=⎩得cos 1ρθ=,从而1cos ρθ=.于是圆1C 与2C 的公共弦的参数方程为1()tan 33x y ππθθ=⎧-≤≤⎨=⎩.变式1 曲线C 的直角坐标方程为2220x y x +-=,以原点为极点,x 轴的正半轴为极抽建立极坐标系,则曲线C 的极坐标方程为 _.题型3 参数方程化普通方程 思路提示已知直线或曲线的参数方程讨论其位置关系、性质问题一般要通过消参(代入法、加减法,三角法)转化为普通方程解答.例16.10 若直线340x y m ++=与圆1cos 2sin x y θθ=+⎧⎨=-+⎩( θ为参数)没有公共点,则实数m 的取值范围是 . 解析 将圆的参数方程1cos 2sin x y θθ=+⎧⎨=-+⎩( θ为参数)化为普通方程22(1)(2)1x y -++=,圆心(1,2)-,半径1r =.直线与圆无公共点,则圆心到直线的距离大于半径,|38|15m -+>|5|5m ⇒->,得10m >或0m <,即m 的范围是(,0)(10,)-∞+∞.变式 1 在平面直角坐标系xOy 中,直线l 的参数方程33x t y t=+⎧⎨=-⎩(参数t ∈R ),圆C 的参数方程为2cos 2sin 2x y θθ=⎧⎨=+⎩(参数[0,2]θ∈π),则圆C 圆心坐标为 _,圆心到直线l 的距离为 . 变式2 (2013湖北理16)在庄角坐标系xOy 中,椭圆C 的参数方程cos sin x a y b ϕϕ=⎧⎨=⎩(ϕ为参数,0a b >>),在极坐标系(与直角坐标系xOy 取相同的长度单位,且以原点O 为极点,以x 轴正半轴为极轴)中,直线l与圆O 的极坐标方程分别为sin()4πρθ+=(m 为非零数)与b ρ=.若直线l 经过椭圆C 的焦点,且与圆O 相切,则椭圆C 的离心率为 . 变式3 参数方程sin cos sin cos x y θθθθ=+⎧⎨=⎩(θ是参数)的普通方程是 .例16.11 已知动圆22:2cos 2sin 0C x y ax by θθ+--=(,a b 是正常数,a b ≠,θ是参数),则圆心的轨迹是 .解析 由动圆22:2cos 2sin 0C x y ax by θθ+--=得222222(cos )(sin )cos sin x a y b a b θθθθ-+-=+.圆心坐标为(cos ,sin )a b θθ(θ为参数),设cos x a θ=,sin y b θ=,则221x y a b ⎛⎫⎛⎫+= ⎪ ⎪⎝⎭⎝⎭,即22221x y a b +=为所求轨迹方程,所以圆心的轨迹是椭圆.变式1 方程2232(05)1x t t y t ⎧=+⎪≤≤⎨=-⎪⎩表示的曲线是( ) A. 线段 B. 双曲线的一支 C. 圆弧 D. 射线变式2 已知直线11cos :sin x t C y t αα=+⎧⎨=⎩(t 为参数),2cos :sin x C y θθ=⎧⎨=⎩(θ为参数).(1)当3πα=时,求1C 与2C 的交点坐标;(2)过坐标原点O 作1C 的垂线,垂足为A ,P 为OA 的中点.当α变化时,求点P 轨迹的参数方程,并指出它是什么曲线.题型4 普通方程化参数方程 思路提示对于直线与圆锥曲线方程化为参数方程问题实质是引入第三个变量的换元法,这里有代数换元(如抛物线22y px =的参数方程222x pt y pt =⎧⎨=⎩)或三角换元(如椭圆22221x y a b +=的参数方程cos sin x a y b θθ=⎧⎨=⎩).例16.12 在平面直角坐标系xOy 中,设(,)P x y 是椭圆2213x y +=上的一个动点,求S x y =+的最大值.分析 利用椭圆的参数方程,建立,x y 与参数θ的关系,运用三角函数最值的求法,求解x y +的最大值.解析 点(,)P x y 是椭圆2213x y +=上的一个动点,则sin x y θθ⎧=⎪⎨=⎪⎩(θ为参数),[0,2]θ∈π,则sin x y θθ+=+2sin()3πθ=+,[0,2]θ∈π,故max ()2x y +=.变式1 已知点(,)P x y 是圆2220x y y +-=上的动点.(1)求2x y +的取值范围;(2)若0x y a ++≥恒成立,求实数a 的取值范围. 变式2 直线l 过(1,1)P ,倾斜角6πα=.(1) 写出l 的参数方程;(2)l 与圆224x y +=相交于,A B 两点,求P 到,A B 两点的距离之积.变式3 已知抛物线2:4C y x =,点(,0)M m 在x 轴的正半轴上,过M 的直线l 与C 相交于,A B 两点,O 为坐标原点.(1)若1m =时,l 的斜率为1,求以AB 为直径的圆的方程;(2)若存在直线l 使得||,||,||AM OM MB 成等比数列,求实数m 的取值范围.题型5 参数方程与极坐标方程的互化 思路提示参数方程与极坐标方程的互化问题,需要通过普通方程这一中间桥梁来实现,先将参数方程(极坐标方程)化为普通方程,再将普通方程化为极坐标方程(参数方程).例16.13 已知曲线C的参数方程为x ty t⎧=⎪⎨=⎪⎩(t 为参数),C 在点(1,1)处的切线为l ,以坐标原点为极点,x 轴的正半轴为极轴建立极坐标系,则l 的极坐标方程为 .分析 把曲线C 的参数方程化为普通方程,求出切线l 的普通方程,然后把求出的直线l 的普通方程化为极坐标方程.解析 由22sin cos 1t t +=得曲线C 的普通方程为222x y +=,过原点O 及切点(1,1)的直线的斜率为1,故切线l 的斜率为1-,所以切线l 的方程为1(1)y x -=--,即20x y +-=.把cos x ρθ=,sin y ρθ=代入直线l 的方程可得cos sin 20ρθρθ+-=sin()204πθ+-=,化简得sin()4πθ+=变式1 设曲线C 的参数方程为2x ty t=⎧⎨=⎩(t 为参数),若以直角坐标系的原点为极点,x 轴的正半轴为极轴建立极坐标系,则曲线C 的极坐标方程为 .有效训练题 1.极坐标方程cos 2sin 2ρθθ=表示的曲线为( )A. 一条射线和一个圆B. 两条直线C. 一条直线和一个圆D. 一个圆 2.圆cos )ρθθ=-的圆心的一个极坐标是( )A. (B. (2,)4πC. 3(2,)4π D. 7(2,)4π3.在极坐标系中,若等边△ABC 的两个顶点是(2,)4A π,5(2,)4B π.那么顶点C 的坐标可能是( )A. 3(4,)4πB. 3)4πC. )πD. (3,)π4.直线的参数方程为sin 501cos50x t y t ⎧=-⎪⎨=-⎪⎩(t 为参数),则直线的倾斜角为( )A. 40B. 50C. 140D.1305.过点(2,3)A 的直线的参数方程为232x ty t =+⎧⎨=+⎩(t 为参数),若此直线与直线30x y -+=相交于点B ,则||AB =( )6.设曲线C 的参数方程23cos 13sin x y θθ=+⎧⎨=-+⎩( θ为参数),直线l 的方程为320x y -+=,则曲线C 上到直线l的点的个数为( ) A. 1 B. 2 C.3 D.4 7.已知直线l的极坐标方程为sin()42πρθ-=,圆M 的参数方程为22cos 12sin x y θθ=+⎧⎨=-+⎩( θ为参数),则圆M 上的点到直线l 的最短距离为 .8.在平面直角坐标系xOy 中,曲线1C 和2C的参数方程分别为x y θθ⎧=⎪⎨=⎪⎩(θ为参数,02πθ≤≤)和1x y ⎧=⎪⎪⎨⎪=⎪⎩(t 为参数),则曲线1C 与2C 的交点坐标为 . 9.已知抛物线的参数方程为222x pt y pt=⎧⎨=⎩(t 为参数),其中0p >,焦点为F ,准线为l ,过抛物线上一点M 作准线l 的垂线,垂足为E ,若||||EF MF =,点M 的横坐标是3,则p = .10.在极坐标系中,O 为极点,已知两点,M N 的极坐标分别为2(4,)3π,)4π,求△OMN 的面积. 11.已知椭圆221164x y +=,O 为坐标原点,,P Q 为椭圆上的两动点,若OP OQ ⊥,求22||||OP OQ +的最大值.12. 已知曲线12cos :sin x C y θθ=⎧⎨=⎩(θ为参数),曲线2247:cos 016C ρθ-+=.(1)若,P Q 分别是曲线1C 和曲线2C 上的两个动点,求线段PQ 长度的最小值;(2)若曲线1C 上与x 轴、y 轴的正半轴分别交于,A B 点,P 是曲线1C 上第一象限内的动点,O 是坐标原点,试求四边形OAPB 面积的最大值.。
极坐标和参数方程知识点总结一、极坐标基础知识极坐标是一种描述平面上点位置的方式,它由两个值组成:极径和极角。
极径表示点到原点的距离,而极角表示点到正半轴的夹角。
二、极坐标与直角坐标系的转换在直角坐标系中,一个点可以用它在x轴和y轴上的投影表示。
而在极坐标系中,一个点可以用它与原点的距离和与正半轴的夹角来表示。
两种坐标系之间可以通过以下公式进行转换:x=r*cosθy=r*sinθ其中,r为极径,θ为极角。
三、常见图形的极坐标方程1. 圆:r=a2. 点:r=03. 直线:θ=k4. 简单叶形线:r=a*cos(2θ)5. 简单心形线:r=a*(1-sinθ)四、参数方程基础知识参数方程是一种描述曲线运动状态的方式,它由两个函数组成:x(t)和y(t)。
这两个函数分别表示曲线上每个点在x轴和y轴上的位置。
五、参数方程与直角坐标系的转换在直角坐标系中,一个曲线可以用y=f(x)的形式表示。
而在参数方程中,一个曲线可以用x(t)和y(t)的形式表示。
两种坐标系之间可以通过以下公式进行转换:x=f(t)y=g(t)其中,t为参数。
六、常见图形的参数方程1. 直线:x=at+b,y=ct+d2. 圆:x=a+r*cosθ,y=b+r*sinθ3. 椭圆:x=a*cosθ,y=b*sinθ4. 双曲线:x=a*secθ,y=b*tanθ七、极坐标与参数方程的联系极坐标和参数方程都是描述曲线运动状态的方式。
它们之间有一定的联系,可以通过以下公式进行转换:r=sqrt(x^2+y^2)tanθ=y/x其中,r为极径,θ为极角。
极坐标与参数方程一、极坐标与参数方程的题型框架二、极坐标与参数方程的知识点1.参数方程的概念:设在平面上取定一个直角坐标系xOy ,把坐标y x ,表示为第三个变量t 的函数:⎩⎨⎧==)()(t g y t f x ,b t a ≤≤……………………①如果对于t 的每一个值(b t a ≤≤),①式所确定的点),(y x M 都在一条曲线上;而这条曲线上任意一点),(y x M ,都可由t 的某个值通过①式得到,则称①式为该曲线的参数方程,其中t 称为参数.2.参数方程与普通方程的互化:把参数方程化为普通方程,需要根据其结构特征,选取适当的消参方法.常见的消参方法有:代入消元法;加减消参法;平方和(差)消参法;乘法消参法等.把曲线C 的普通方程0),(=y x F 化为参数方程的关键:一是适当选取参数;二是确保互化前后方程的等价性.要注意方程中的参数的变化范围.3.直线、圆、椭圆的参数方程:(1)经过一定点),(000y x P ,倾斜角为α 的直线l 的参数方程为:⎩⎨⎧+=+=ααsin ,cos 00t y y t x x (t 为参数);(2)直线参数方程的一般形式为⎩⎨⎧+=+=bt y y at x x 00,(t 为参数);(3)圆的参数方程为⎩⎨⎧+=+=θθsin ,cos 00r y y r x x (θ为参数);(5)椭圆)0(12222>>=+b a b y a x 的参数方程为⎩⎨⎧==θθsin ,cos b y a x (θ,ρ为参数).4.极坐标系的概念:在平面内取一个定点O ,O 点出发的一条射线Ox ,一个长度单位及计算角度的正方向(通常取逆时针方向),合称为一个极坐标系.O 称为极点,Ox 称为极轴.设M 是平面内任意一点,极点O 与点M 的距离OM 叫做点M 的极径,记作ρ;以极轴Ox 为始边,射线OM 为终边的角xOM 叫做点M 的极角,记作θ ,有序数对),(θρ叫做点M 的极坐标.一般情况下,约定0≥ρ.5.极坐标系与直角坐标系的互化:直角坐标化极坐标:θρcos =x ,θρsin =y ;极坐标化直角坐标:222y x +=ρ,).0(tan =/=x xyθ三、轨迹问题1.圆的极坐标方程若圆心为M (ρ0,θ0),半径为r 的圆方程为ρ2-2ρ0ρcos(θ-θ0)+ρ20-r 2=0.几个特殊位置的圆的极坐标方程(1)当圆心位于极点,半径为r :ρ=r ;(2)当圆心位于M (a,0),半径为a :ρ=2a cos θ;(3)当圆心位于π(,)2M a ,半径为a :ρ=2a sin θ.2.直线的极坐标方程若直线过点M (ρ0,θ0),且极轴到此直线的角为α,则它的方程为:ρsin(θ-α)=ρ0sin (θ0-α).几个特殊位置的直线的极坐标方程(1)直线过极点:θ=θ0和θ=π-θ0;(2)直线过点M (a,0)且垂直于极轴:ρcos θ=a ;(3)直线过π(,)2M b 且平行于极轴:ρsin θ=b .例题【例1】在极坐标系中,已知圆的圆心(6,)3C π,半径3r =,Q 点在圆C 上运动.以极点为直角坐标系原点,极轴为x 轴正半轴建立直角坐标系.(1)求圆C 的参数方程;(2)若P 点在线段OQ 上,且:2:3OP PQ =,求动点P 轨迹的极坐标方程.【解析】(1)由已知得,圆心(6,)3C π的直角坐标为C ,3r =,所以C的直角坐标方程为22(3)(9x y -+-=,所以圆C的参数方程为33cos 3sin x y θθ=+⎧⎪⎨=⎪⎩(θ为参数).(2)由(1)得,圆C的极坐标方程为26(cos )270ρρθθ-++=,即212sin(276ρρθπ=+-,设(),P ρθ,()1,Q ρθ,根据:2:3OP PQ =,可得1:2:5ρρ=,将152ρρ=代入C 的极坐标方程,得225120sin()10806ρρθπ-++=,即动点p 轨迹的极坐标方程为225120sin()10806ρρθπ-++=.【例2】在平面直角坐标系xOy 中,圆C 的参数方程为22cos ,2sin x y αα=+⎧⎨=⎩(α为参数),以点O 为极点,x 轴的正半轴为极轴建立极坐标系.(1)求圆C 的极坐标方程;(2)过极点O 作直线与圆C 交于点A ,求OA 的中点所在曲线的极坐标方程.【解析】(1)圆C 的参数方程为22cos ,2sin x y αα=+⎧⎨=⎩(α为参数),转换为直角坐标方程为:()2224x y -+=,转换为极坐标方程为:4cos ρθ=.(2)过极点O 作直线与圆C 交于点A ,设OA 的中点坐标为()00,ρθ,所以()00,2A ρθ,所以0024cos ρθ=,即002cos ρθ=,所以OA 中点所在的曲线的极坐标方程为2cos ρθ=.【例3】已知圆C 经过点P )3,2(π,圆心C 为直线ρsin )3(πθ-=-3与极轴的交点,求圆C 的极坐标方程.【解析】解法1在直线的极坐标方程ρsin )3(πθ-=-3中,令θ=0,得ρ=2,所以C(2,0).因为△POC 是边长为2的正三角形,所以圆C 的半径r =2.因为圆C 经过极点O ,所以圆C 极坐标方程为ρ=4cos θ.解法2以极点为坐标原点,极轴为x 轴建立平面直角坐标系,则直线方程为y =3x -23,P 的直角坐标为(1,3),令y =0,得x =2,所以C(2,0),所以圆C 的半径PC =(2-1)2+(0-3)2=2,所以圆C 的方程为(x -2)2+(y -0)2=4,即x 2+y 2-4x =0,所以圆C 的极坐标方程为ρ=4cos θ.变式训练【练习1】(2019年高考全国Ⅱ卷理数)在极坐标系中,O 为极点,点000(,)(0)M ρθρ>在曲线:4sin C ρθ=上,直线l 过点(4,0)A 且与OM 垂直,垂足为P .(1)当0=3θπ时,求0ρ及l 的极坐标方程;(2)当M 在C 上运动且P 在线段OM 上时,求P 点轨迹的极坐标方程.【解析】(1)因为()00,M ρθ在C 上,当03θπ=时,04sin 3ρπ==.由已知得||||cos23OP OA π==.设(,)Q ρθ为l 上除P 的任意一点.在Rt OPQ △中,cos(||23OP ρθπ-==,经检验,点(2,)3P π在曲线cos(23ρθπ-=上.所以,l 的极坐标方程为cos()23ρθπ-=.(2)设(,)P ρθ,在Rt OAP △中,||||cos 4cos ,OP OA θθ==即 4cos ρθ=.因为P 在线段OM 上,且AP OM ⊥,故θ的取值范围是[,42ππ.所以P 点轨迹的极坐标方程为4cos ,[,42ρθθππ=∈.【练习2】在极坐标系中,已知圆C 经过点P )4,22(π,圆心为直线ρsin(θ-π3)=-3与极轴的交点,求圆C 的极坐标方程.【解析】在直线方程ρsin (θ-π3)=-3中,令θ=0,得ρ=2,所以圆心为C(2,0).在△POC 中,由余弦定理,得圆C 的半径r =CP =2.圆C 经过极点,其极坐标方程为ρ=4cos θ.【练习3】(2019年高考全国Ⅲ卷理数)如图,在极坐标系Ox 中,(2,0)A ,4B π,2,4C 3π,(2,)D π,弧 AB , BC , CD 所在圆的圆心分别是(1,0),(1,2π,(1,)π,曲线1M 是弧 AB ,曲线2M 是弧 BC,曲线3M 是弧 CD .(1)分别写出1M ,2M ,3M 的极坐标方程;(2)曲线M 由1M ,2M ,3M 构成,若点P 在M 上,且||OP =P 的极坐标.【解析】(1)由题设可得,弧 ,,AB BCCD 所在圆的极坐标方程分别为2cos ρθ=,2sin ρθ=,2cos ρθ=-.所以1M 的极坐标方程为π2cos (0)4ρθθ=≤≤,2M 的极坐标方程为π3π2sin ()44ρθθ=≤≤,3M 的极坐标方程为3π2cos (π)4ρθθ=-≤≤.(2)设(,)P ρθ,由题设及(1)知若π04θ≤≤,则2cos θ=,解得π6θ=;若π3π44θ≤≤,则2sin θ=,解得π3θ=或2π3θ=;若3ππ4θ≤≤,则2cos θ-=5π6θ=.综上,P 的极坐标为π)6或π3或2π)3或5π6.四、几何意义问题(一)直线参数方程t 的几何意义1、直线参数方程:(1)注意必须是标准形式;(2)直线的参数方程⎩⎨⎧+=+=ααsin ,cos 00t y y t x x (t 为参数)中参数t 的几何意义:t 表示直线上任一点),(y x M 到直线上定点),(000y x M 的距离;2、直线与二次曲线相交问题:将直线的参数方程与曲线的普通方程联立,通过判断∆的符号来确定交点的个数;若0>∆,则有两个交点,此时的1t 、2t 分别表示交点B A 、与直线所过定点),(000y x M 的距离.例题【例1】在平面直角坐标系xOy 中,直线l 的参数方程为1cos sin x t y t αα=+⎧⎨=⎩(t 为参数,0πα≤<),在以坐标原点为极点,x 轴正半轴为极轴的极坐标系中,曲线C 的极坐标方程为222.1sin ρθ=+(1)求曲线C 的直角坐标方程;(2)设点M 的坐标为(1,0),直线l 与曲线C 相交于A ,B 两点,求11MA MB+的值.【解析】(1)曲线2221sin ρθ=+,即222sin 2ρρθ+=,222,sin x y y ρρθ=+= ,∴曲线C 的直角坐标方程为2222x y +=,即2212x y +=.(2)将1cos sin x t y t αα=+⎧⎨=⎩代入2222x y +=并整理得22(1sin )2cos 10t t αα++-=,1212222cos 1,1sin 1sin t t t t ααα-∴+=-=++,121211···MA MB AB t t MA MB MA MB MA MB t t +-∴+===-,122221sin t t α-===+,2222111sin 11sin MA MBαα+∴+==+【例2】在直角坐标系xOy 中,直线l 的参数方程为1cos 1sin x t xy t x =+⎧⎨=-+⎩(t 为参数,0α<<π),以O 为极点,x 轴正半轴为极轴建立极坐标系,曲线C 的极坐标方程为(12cos 2)8cos ρθθ-=.(1)判断直线l 与曲线C 的公共点的个数,并说明理由;(2)设直线l 与曲线C 交于不同的两点,A B ,点()1,1P -,若114||3PA PB -=,求tan α的值.【解析】(1)由()1cos 28cos ρθθ-=得2sin 4cos ρθθ=,所以22sin 4cos ρθρθ=,即24y x =,将直线l 的参数方程代入24y x =,得()()21sin 41cos t t αα-+=+,即()22sin2sin 4cos 30t t ααα⋅-+⋅-=,由0α<<π知2sin 0α>,()222sin 4cos 12sin 0∆ααα=++>,故直线l 与曲线C 有两个公共点;(2)由(1)可设方程()22sin 2sin 4cos 30t t ααα⋅-+⋅-=的两根为12t t ,,则1222sin 4cos sin ααα++=t t ,12230sin α-⋅=<t t ,故12121124||sin 2cos 33PA PB t t PA PB PA t t αα-+-===+=⋅,∴22sin 4sin cos 4cos 4αααα++=,即24sin cos 3sin ααα=,∴4tan 3α=.2变式训练【练习1】在直角坐标系xOy 中,以原点O 为极点,x 轴的正半轴为极轴建立极坐标系,圆C 的极坐标方程为212cos 110ρρθ++=.(1)求圆C 的直角坐标方程;(2)设(1,0)P ,直线l 的参数方程是1cos sin x t y t αα=+⎧⎨=⎩(t 为参数),已知l 与圆C 交于,A B两点,且34PA PB =,求l 的普通方程.【解析】(1)将222,cos x y x ρρθ=+=代入圆C 的极坐标方程212cos 110ρρθ++=,得2212110x y x +++=,化为圆的标准方程为22(6)25x y ++=.(2)将直线l 的参数方程1cos sin x t y t αα=+⎧⎨=⎩(t 为参数)代入圆C 的直角坐标方程()22625x y ++=中,化简得214cos 240t t α++=,设,A B 两点所对应的参数分别为12,t t ,由根与系数的关系知121214cos ,24t t t t α+=-=,①∴12,t t 同号,又34PA PB =,∴1234t t =,②由①②可知12t t ⎧⎪⎨⎪⎩或12==t t ⎧-⎪⎨-⎪⎩∴14cos α-=或14cos α-=-,解得2cos 2α=±,∴tan 1k α==±,∴l 的普通方程为(1)y x =±-.【练习2】在直角坐标系xOy 中,直线1C的参数方程为3623x t y t ⎧=-⎪⎪⎨⎪=+⎪⎩(其中t 为参数).以坐标原点O 为极点,x 轴非负半轴为极轴建立极坐标系,曲线2C 的极坐标方程为2cos 3sin ρθθ=.(1)求1C 和2C 的直角坐标方程;(2)设点(0,2)P ,直线1C 交曲线2C 于,M N 两点,求22PMPN +的值.【解析】(1)直线1C 的参数方程为33623x y t ⎧=-⎪⎪⎨⎪=+⎪⎩(其中t 为参数),消去t可得20y +-=;由2cos 3sin ρθθ=,得22cos 3sin ρθρθ=,则曲线2C 的直角坐标方程为23x y =.(2)将直线1C的参数方程3323x t y t ⎧=-⎪⎪⎨⎪=+⎪⎩代入23x y =,得2180t --=,设,M N 对应的参数分别为12,t t,则121218t t t t ⎧+=⎪⎨=-⎪⎩,()2221212290PM PN t t t t +=+-=.(二)极坐标中极径的几何意义极坐标方程中ρ的几何意义:M 是平面内任意一点,极点O 与点M 的距离OM 叫做点M 的极径,记作ρ;即OM=ρ例题【例1】在直角坐标系中,已知曲线的方程为,的方程为,是一条经过原点且斜率大于的直线,以直角坐标系原点为极点,轴正半轴为极轴建立极坐标系.(1)求与的极坐标方程;(2)若与的一个公共点(异于点),与的一个公共点为,求的取值范围.【解析】(1)曲线的方程为,的极坐标方程为,的方程为,其极坐标力程为.(2)是一条过原点且斜率为正值的直线,的极坐标方程为,,,联立与的极坐标方程,得,即,联立与的极坐标方程,得,即,所以,又,所以.【例2】在平面直角坐标系xOy 中,已知椭圆的方程为:2212012x y+=,动点P 在椭圆上,O 为原点,线段OP 的中点为Q .(1)以O 为极点,x 轴的正半轴为极轴,建立极坐标系,求点Q 的轨迹的极坐标方程;(2)设直线l 的参数方程为1,232x t y t ⎧=⎪⎪⎨⎪=⎪⎩(t 为参数),l 与点Q 的轨迹交于M 、N 两点,求弦长MN .【解析】(1)设点Q 的坐标为(,)x y ,Q 为线段OP 的中点,∴点P 的坐标为(2,2)x y .由点P 在椭圆上得22(2)(2)12012x y +=,化简得点Q 的轨迹的直角坐标方程为22153x y+=,①将cos x ρθ=,sin y ρθ=,代入①得2222cos sin 153ρθρθ+=,化简可得点Q 的轨迹的极坐标方程为22(32sin )15ρθ+=.(2)方法1:由直线l 的参数方程1,232x t y t⎧=⎪⎪⎨⎪=⎪⎩(t 为参数)知,直线l 过极点,倾斜角为π3,∴直线l 的极坐标方程为π()3θρ=∈R .由22π,3(32sin )15,θρθ⎧=⎪⎨⎪+=⎩解得:1π,330,3θρ⎧=⎪⎪⎨⎪=⎪⎩和2π,330.3θρ⎧=⎪⎪⎨⎪=-⎪⎩∴弦长122303MN ρρ=-=.方法2:把直线l 的参数方程1,232x t y ⎧=⎪⎪⎨⎪=⎪⎩(t 为参数)代入①得22344153t t +=,化简得2103t =,123030,,33t t ∴==-设M 、N 两点对应的参数分别为1t ,2t ,由直线参数方程t 的几何意义得弦长122303MN t t =-=.方法3:由直线l 的参数方程1,232x t y ⎧=⎪⎪⎨⎪=⎪⎩(t 为参数)知,直线l 的普通方程为3y x =,联立22153y x y ⎧=⎪⎨+=⎪⎩,,解得11306102x y ⎧=⎪⎪⎨⎪=⎪⎩和2230610.2x y ⎧=-⎪⎪⎨⎪=-⎪⎩弦长2303MN ==.变式训练【练习1】在直角坐标系xOy 中,直线1:2C x =-,圆222:(1)(2)1C x y -+-=,以坐标原点O 为极点,以x 轴正半轴为极轴,建立极坐标系.(1)求1C ,2C 的极坐标方程;(2)若直线3C 的极坐标方程θπ=4()ρ∈R ,设2C 与3C 的交点为M ,N ,求2C MN △的面积.【解析】(1)222cos ,sin ,x y x y ρθρθρ==+= 1C ∴的极坐标方程为cos 2ρθ=-.由2C 的直角坐标方程22(1)(2)1x y -+-=,展开得222440x y x y +--+=,2C ∴的极坐标方程为22cos 4sin 40ρρθρθ--+=.(2)将4θπ=代入22cos 4sin 40ρρθρθ--+=,得240ρ-+=,解得1212,,ρρρρ==-=∴即||MN =.由于2C 的半径为1,即221C M C N ==.易知22222||C MC N MN +=,即2C MN ∆为等腰直角三角形,2111122C MN S ∆=⨯⨯=∴.【练习2】在平面直角坐标系中,曲线1C 的参数方程为cos 2sin x r y r ϕϕ=⎧⎨=+⎩,(0r >,ϕ为参数),以坐标原点O 为极点,x 轴正半轴为极轴建立极坐标系,曲线1C 经过点π(2,)6P ,曲线2C 的极坐标方程为2(2cos 2)6ρθ+=.(1)求曲线1C 的极坐标方程;(2)若1(,)A ρα,2π(,)2B ρα+是曲线2C 上两点,求2211||||OA OB +的值.【解析】(1)将曲线1C 的参数方程cos 2sin x r y r ϕϕ=⎧⎨=+⎩,化为普通方程为222(2)x y r +-=,即222440x y y r +-+-=.由222x y ρ=+,sin y ρθ=,得曲线1C 的极坐标方程为224sin 40r ρρθ-+-=.由曲线1C 经过点π(2,6P ,则22π242sin4026r r -⨯⨯+-=⇒=(2r =-舍去),故曲线1C 的极坐标方程为4sin ρθ=.(2)由题意可知21(2cos 2)6ρα+=,2222π[2cos 2((2cos 2)62ραρα++=-=,所以22221211112cos 22cos 22||||663OA OB ααρρ+-+=+=+=.【练习3】在极坐标系中,曲线1C 的极坐标方程为4cos ρθ=,曲线2C 的极坐标方程为4sin ρθ=,以极点O 为坐标原点,极轴为x 的正半轴建立平面直角坐标系xOy .(1)求1C 和2C 的参数方程;(2)已知射线1:(0)2l πθαα=<<,将1l 逆时针旋转6π得到2:6l πθα=+,且1l 与1C 交于,O P 两点,2l 与2C 交于,O Q 两点,求OP OQ ⋅取得最大值时点P 的极坐标.【解析】(Ⅰ)在直角坐标系中,曲线1C 的直角坐标方程为()2224x y -+=所以1C 参数方程为22(2x cos y sin ααα=+⎧⎨=⎩为参数).曲线2C 的直角坐标方程为()2224x y +-=.所以2C 参数方程为2(22x cos y sin βββ=⎧⎨=+⎩为参数)(Ⅱ)设点P 极坐标为()1,ρα,即14cos ρα=,点Q 极坐标为2,6πρα⎛⎫+⎪⎝⎭,即24sin 6πρα⎛⎫=+ ⎪⎝⎭.则124cos 4sin 6OP OQ πρραα⎛⎫⋅==⋅+⎪⎝⎭3116cos sin cos 22ααα⎛⎫=⋅+ ⎪ ⎪⎝⎭8sin 246πα⎛⎫=++ ⎪⎝⎭70,.2,2666ππππαα⎛⎫⎛⎫∈∴+∈ ⎪ ⎪⎝⎭⎝⎭ 当2,626πππαα+==时OP OQ ⋅取最大值,此时P 点的极坐标为23,6π⎛⎫ ⎪⎝⎭.五、最值问题1.距离最值(点到点、曲线点到线、)距离的最值:---用“参数法”(1)曲线上的点到直线距离的最值问题(2)点与点的最值问题“参数法”:设点---套公式--三角辅助角①设点:设点的坐标,点的坐标用该点在所在曲线的的参数方程来设②套公式:利用点到线的距离公式③辅助角:利用三角函数辅助角公式进行化一2.面积的最值问题面积最值问题一般转化成弦长问题+点到线的最值问题例题【例1】在直角坐标系xOy 中,已知曲线1C 的方程为221106x y +=,曲线2C 的参数方程为1,2382x t y t ⎧=⎪⎪⎨⎪=--⎪⎩(t 为参数).(1)求1C 的参数方程和2C 的普通方程;(2)设点P 在1C 上,点Q 在2C 上,求PQ 的最小值.【解析】(1)由曲线1C 的方程为221106x y +=,得曲线1C的参数方程为,x y θθ⎧=⎪⎨=⎪⎩(θ为参数),由曲线2C 的参数方程为1,2382x t y t ⎧=⎪⎪⎨⎪=--⎪⎩(t 为参数),得曲线2C的普通方程为80y ++=.(2)设)P θθ,点P 到直线2C 的距离为d ,则PQ 的最小值即为d 的最小值,因为()6sin 82d θϕ++=,其中tan ϕ=当sin()1θϕ+=-时,d 的最小值为1,此时min 1PQ =.【例2】已知直线)(23211:为参数t ty t x l ⎪⎪⎩⎪⎪⎨⎧=+=,曲线)(sin cos :1为参数θθθ⎩⎨⎧==y x C .(1)设l 与1C 相交于B A ,两点,求||AB ;(2)若把曲线1C 上各点的横坐标压缩为原来的21倍,纵坐标压缩为原来的23倍,得到曲线2C ,设点P 是曲线2C 上的一个动点,求它到直线l 的距离的最小值.【解析】(1)l 的普通方程为1),1(3C x y -=的普通方程为.122=+y x联立方程组⎪⎩⎪⎨⎧=+-=,1),1(322y x x y 解得l 与1C 的交点为)0,1(A ,)23,21(-B ,则1||=AB .(2)2C 的参数方程为θθθ(.sin 23,cos 21⎪⎪⎩⎪⎪⎨⎧==y x 为参数).故点P 的坐标是)sin 23,cos 21(θθ,从而点P 到直线 的距离是]2)4sin(2[432|3sin 23cos 23|+-=--=πθθθd ,由此当1)4sin(-=-πθ时,d 取得最小值,且最小值为)12(46-.【例3】已知直线11: x t l y =+⎧⎪⎨⎪⎩(t为参数),曲线1cos : 2sin x C y θθ⎧=+⎪⎨=+⎪⎩(θ为参数),以坐标原点为极点,x 轴的正半轴为极轴建立直角坐标系.(1)求曲线1C 的极坐标方程,直线1l 的普通方程;(2)把直线1l 向左平移一个单位得到直线2l ,设2l 与曲线1C 的交点为M ,N ,P 为曲线1C 上任意一点,求PMN △面积的最大值.【解析】(1)把曲线1cos : 2sin x C y θθ⎧=⎪⎨=+⎪⎩消去参数可得(()2221x y +-=,令cos x ρθ=,sin y ρθ=,代入可得曲线1C 的极坐标方程为2cos 4sin 60ρθρθ--+=.把直线11: x tl y =+⎧⎪⎨=⎪⎩化为普通方程)1y x -.(2)把直线1l 向左平移一个单位得到直线2l的方程为y =,其极坐标方程为π3θ=.联立2cos 4sin 60π3ρθρθθ⎧--+==⎪⎨⎪⎩所以260ρ-+=,所以12126ρρρρ⎧+=⎪⎨=⎪⎩,故12ρρ-==圆心到直线2l的距离为12d ==,圆上一点到直线2l 的最大距离为13122+=,所以PMN △面积的最大值为1333224S =⨯⨯.变式训练【练习1】已知点(,)P x y 是圆2220x y y +-=上的动点.(1)求2x y +的取值范围;(2)若0x y a ++≥恒成立,求实数a 的取值范围.解析(1)由圆的方程222x y y +=得()2211x y +-=,得[]()cos 0,21sin x y θθθπθ=⎧∈⎨=+⎩为参数,。
参数方程与极坐标方程例题和知识点总结一、参数方程参数方程是在数学中常用的一种表示曲线的方式,它通过引入一个参数来描述曲线上点的坐标。
(一)参数方程的定义一般地,在平面直角坐标系中,如果曲线上任意一点的坐标$x$、$y$都是某个变数$t$的函数:\\begin{cases}x = f(t) \\y = g(t)\end{cases}\并且对于$t$的每一个允许的取值,由方程组所确定的点$(x,y)$都在这条曲线上,那么这个方程组就叫做曲线的参数方程,联系变数$x$、$y$的变数$t$叫做参变数,简称参数。
(二)参数方程的常见形式1、直线的参数方程若直线经过点$M(x_0,y_0)$,倾斜角为$\alpha$,则直线的参数方程为:\\begin{cases}x = x_0 + t\cos\alpha \\y = y_0 + t\sin\alpha\end{cases}\($t$为参数)2、圆的参数方程圆心在点$(a,b)$,半径为$r$的圆的参数方程为:\\begin{cases}x = a + r\cos\theta \\y = b + r\sin\theta\end{cases}\($\theta$为参数)3、椭圆的参数方程焦点在$x$轴上的椭圆:$\frac{x^2}{a^2} +\frac{y^2}{b^2} = 1$ ($a > b > 0$)的参数方程为:\\begin{cases}x = a\cos\varphi \\y = b\sin\varphi\end{cases}\($\varphi$为参数)(三)参数方程的应用1、求曲线的轨迹方程例:已知点$M(x,y)$在圆$x^2 + y^2 = 4$上运动,求点$N(2x 3, 2y + 4)$的轨迹方程。
设点$M(2\cos\theta, 2\sin\theta)$,则点$N(4\cos\theta 3, 4\sin\theta + 4)$所以$x = 4\cos\theta 3$,$y = 4\sin\theta + 4$消去参数$\theta$可得:$(x + 3)^2 +(y 4)^2 = 16$2、参数方程在物理中的应用在研究物体的运动时,常常使用参数方程来描述物体的位置、速度等随时间的变化关系。
高中数学回归课本校本教材24(一)基础知识 参数极坐标 1.极坐标定义:M 是平面上一点,ρ表示OM 的长度,θ是MOx ∠,则有序实数实数对(,)ρθ,ρ叫极径,θ叫极角;一般地,[0,2)θπ∈,0ρ≥。
2.常见的曲线的极坐标方程(1)直线过点M 00(,)ρθ,倾斜角为α常见的等量关系:正弦定理sin sin OP OMOMP OPM=∠∠,0OMP παθ∠=-+OPM αθ∠=-; (2)圆心P 00(,)ρθ半径为R 的极坐标方程的等量关系:勾股定理或余弦定理; (3)圆锥曲线极坐标:1cos ep e ρθ=-,当1e >时,方程表示双曲线;当1e =时,方程表示抛物线;当01e <<时,方程表示椭圆.提醒:极点是焦点,一般不是直角坐标下的坐标原点。
极坐标方程324cos ρθ=-表示的曲线是 双曲线3.参数方程:(1)圆222()()x a x b r -+-=的参数方程:cos ,sin x a r x b r θθ-=-=(2)椭圆22221x y a b +=的参数方程:cos ,sin x a x b θθ==(3)直线过点M 00(,)x y ,倾斜角为α的参数方程:00tan y y x x α-=-即0cos sin x x y y t θθ--==, 即0cos sin x x t y y t αα=+⎧⎨=+⎩注:0cos x x t θ-=,0sin y y tθ-=据锐角三角函数定义,T 几何意义是有向线段MP的数量00000()00.t l M M x y M M M M M M t M M t ><其中表示直线上以定点为起点,任意一点,为终点的有向线段的数量,当点在的上方时,;当点在的下方时,;()()222420()21x pt y px p t y pt y t x t⎧==>⎨=⎩=抛物线的参数方程为:为参数.由于,因此参数的几何意义是抛物线上的点与抛物线的顶点连线的斜率的倒数.如:将参数方程222sin (sin x y θθθ⎧=+⎪⎨=⎪⎩为参数)化为普通方程为2(23)y x x =-≤≤ 将2sin y θ=代入22sin x θ=+即可,但是20sin 1θ≤≤;4. 极坐标和直角坐标互化公式:cos sin x y ρθρθ=⎧⎨=⎩ 或222tan (0)x y yx x ρθ⎧=+⎪⎨=≠⎪⎩,θ的象限由点(x,y)所在象限确定.(1)它们互化的条件则是:极点与原点重合,极轴与x 轴正半轴重合.(2)将点(,)ρθ变成直角坐标(cos ,sin )ρθρθ,也可以根据几何意义和三角函数的定义获得。
5. 极坐标的几个注意点:(1)极坐标和直角坐标转化的必要条件是具有共同的坐标原点(极点) 如:已知圆C的参数方程为2cos 2sin x y θθ⎧=⎪⎨=⎪⎩(θ为参数),若P 是圆C 与y 轴正半轴的交点,以圆心C 为极点,x 轴的正半轴为极轴建立极坐标系,求过点P 的圆C 的切线的极坐标方程。
5cos()26πρθ-= 如:已知抛物线24y x =,以焦点F 为极点,x 轴的正半轴为极轴建立极坐标系,求抛物线的极坐标方程。
即21cos ρθ=-。
(2)对极坐标中的极径和参数方程中的参数的几何意义认识不足如:已知椭圆的长轴长为6,焦距12F F =过椭圆左焦点F 1作一直线,交椭圆于两点M 、N ,设21(0)F FM ααπ∠=≤<,当α为何值时,MN 与椭圆短轴长相等566ππα=或 (3)直角坐标和极坐标一般不要混合使用:如:已知某曲线的极坐标方程为2sin()204πρθ-+-=。
(1)将上述曲线方程化为普通方程;(2)若点(,)P x y 是该曲线上任意点,求x y +的取值范围。
[222,222]-+(二)基本计算1.求点的极坐标:有序实数实数对(,)ρθ,ρ叫极径,θ叫极角;如:点M 的直角坐标是(1,3)-,则点M 的极坐标为 2(2,)3π 提示:2(2,2),3k k Z ππ+∈都是点M 的极坐标.2. 求曲线轨迹的方程步骤: (1)建立坐标系;(2)在曲线上取一点P (,)ρθ;(3)写出等式;(4)根据,ρθ几何意义用,ρθ表示上述等式,并化简(注意:,x y ρθ≠≠);(5)验证。
如:长为2a 的线段,其端点在Ox 轴和Oy 轴正方向上滑动,从原点作这条线段的垂线,垂足为M ,求点M 的轨迹的极坐标方程(Ox 轴为极轴),再化为直角坐标方程.解:设点M的极坐标为(,)ρθ,则OBM AOM θ∠=∠=,且||2sin OA a θ=,||cos 2sin cos sin2OA a a ρθθθθ===,∴点M的轨迹的极坐标方程为sin 2(0)2a πρθθ=<<.由sin2a ρθ=可得322sin cos a ρρθθ=,∴3222()2x y axy+=其直角坐标方程为3222()2(0,0)xy axy x y +=>>.3.求轨迹方程的常用方法:⑴直接法:直接通过建立x 、y 之间的关系,构成(,)0F x y =,是求轨迹最基本的方法.⑵待定系数法:可先根据条件设所求曲线的方程,再由条件确定其待定系数,代回方程⑶代入法(相关点法或转移法). 如:从极点作圆2cos a ρθ=的弦,求各弦中点的轨迹方程.解:设所求曲线上的动点M 的极坐标为(,)ρθ,圆2cos a ρθ=上的动点的极坐标为11(,)ρθ由题设可知,112θθρρ=⎧⎨=⎩,将其代入圆的方程得:cos ()22a ππρθθ=-≤≤. ⑷定义法:如果能够确定动点轨迹满足某已知曲线定义,则可由曲线定义直接写出方程.⑸交轨法(参数法):当动点(,)P x y 坐标之间的关系不易直接找到,也没有相关动点可用时,可考虑将x 、y 均用一中间变量(参数)表示,得参数方程,再消去参数得普通方程.4.参数和极径的几何意义的运用:ρ表示OM 的长度;T 几何意义是有向线段MP的数量;如:已知过点P 的直线l 与x 轴正半轴、y 轴正半轴分别交于A B 两点,则AB9cossin x t y t αα=+⎧⎪⎨⎪⎩倾斜角为α,则12AB tt =-或AB=12||||t t +,129,cos t t α=-=,则9()cos l αα=-,29sin ()cos l ααα'=-令()0l α'=,3tan α==tan 150αα==,min 93()(150)83cos150l l α==-+=注意:本题可以取倾斜角的补角为α 如 过抛物线28yx =的焦点F作倾斜角为4π的直线,交抛物线于,A B两点,求线段AB 的长度.解:对此抛物线有1,4e p ==,所以抛物线的极坐标方程为41cos ρθ=-,,A B 两点的极坐标分别为4π和54π,||4cos 4)4(2FA π=-=, ||4(1cos54)4(2FB π=-=,∴||||||16AB FA FB =+=.∴线段AB 的长度为16.5.参数方程的应用----求最值: 如:已知点(,)P x y 是圆222xy y +=上的动点,(1)求2x y +的取值范围;(2)若0x y a ++≥恒成立,求实数a 的取值范围。
[1].(2)cos sin 10x y a a θθ++=+++≥ [1,)+∞.如:在椭圆2211612x y +=上找一点,使这一点到直线2120x y --=的距离的最小值.解:设椭圆的参数方程为4cosx y θθ=⎧⎪⎨=⎪⎩,d =3)33πθθθ-+- 当cos()13πθ+=,即53πθ=时,mind(2,3)-.C.选修4 – 4 参数方程与极坐标已知极坐标系的极点与直角坐标系的原点重合,极轴与x 轴的正半轴重合。
若曲线C 1的方程为28sin 15ρρθ=-,曲线C 2的方程为,(x y ααα⎧=⎪⎨=⎪⎩为参数)。
(1)将C 1的方程化为直角坐标方程;(2)若C 2上的点Q 对应的参数为3=4πα,P 为C 1上的动点,求PQ 的最小值。
提示:(1)228150x y y +-+=.(2)当34απ=时,得(2,1)Q -,点Q 到1C ,所以PQ 的最小值为1.在极坐标系中,求经过三点O (0,0),A (2,2π),B (4π)的圆的极坐标方程.解:设(,)P ρθ是所求圆上的任意一点,则cos()4OP OB θπ=-, 故所求的圆的极坐标方程为)4ρθπ=-.已知极坐标系的极点与直角坐标系的原点重合,极轴与x 轴的正半轴重合.若直线l 的极坐标方程为23)4sin(=-πθρ.(1)把直线l 的极坐标方程化为直角坐标系方程;(2)已知P 为椭圆1916:22=+y x C 上一点(已知曲线C 的参数方程为()4cos 3sin x y ααα=⎧⎨=⎩,为参数,)求P 到直线l 的距离的最大值.解:(1)直线l的极坐标方程sin 4ρθπ⎛⎫-= ⎪⎝⎭sin cos θθ= 即sin cos 6ρθρθ-=,所以直线l 的直角坐标方程为60x y -+=; (2)P为椭圆221169x y C +=:上一点,设(4cos 3sin )P αα,,其中[02)α∈π,,则P 到直线l的距离d 4cos 5ϕ=所以当cos()1αϕ+=时,d在极坐标系中,圆C的方程为)4ρθπ=+,以极点为坐标原点,极轴为x 轴的正半轴建立平面直角坐标系,直线l 的参数方程为,12x t y t =⎧⎨=+⎩(t 为参数),判断直线l 和圆C 的位置关系.解:消去参数t ,得直线l 的直角坐标方程为21y x =+;)4πρθ=+即2(sin cos )ρθθ=+,两边同乘以ρ得22(sin cos )ρρθρθ=+,得⊙C 的直角坐标方程为:22(1)(1)2x x -+-=,圆心C 到直线l的距离d ==<,所以直线l 和⊙C 相交.已知曲线C 的极坐标方程是2sin ρθ=,直线l 的参数方程是32,545x t y t ⎧=-+⎪⎨⎪=⎩(t 为参数). (1)将曲线C 的极坐标方程化为直角坐标方程;(2)设直线l 与x 轴的交点是M ,N 是曲线C 上一动点,求MN 的最大值. 解:(1)曲线C 的极坐标方程可化为22sin ρρθ=又222,cos ,sin x y x y ρρθρθ+===,所以曲线C 的直角坐标方程为2220x y y +-=(2)将直线l 的参数方程化为直角坐标方程,得4(2)3y x =--令0y =,得2x =,即M 点的坐标为(2,0).又曲线C 为圆,圆C 的圆心坐标为(1,0),半径1r =,则MC =所以1MN MCr +=≤3.1OPOQ=的距离为,()()()000000 10.1321121sin() 2.(,),(,).4.x A l x y A l d m l P Q m ρρρπρρθρθρθθθθθ-+===+=⎛==⎧ -=⇒⎨ =⎩ ==⎝:以极点为原点,极轴为轴的正半轴,建立直角坐标系,则点的直角坐标为直线的直角坐标方解程为因为到直线的距离,由得直线的方程为设所,则析以①()()()123123124sin ()4234cos (2)4224(0)212(4)2,0(0)242()t (a 2010)n Ox C C C C C C M N C C A B O AB MN ππρθθπππρθθθππρθπππθαρα=≤≤=≤≤<≤=≤≤=≥<<如图,在极坐标系中,已知曲线::;:或;:.求由曲线,,围成的区域的面积;设,,,射线,与曲线,分别交于,不同于极点两点.若线段的中点恰好落在直线上变,浙江 卷求式训练α的值.0220001()sin()221131()().()881642.sin()2441si 4n(44)2P l r Q x y Q πππρθθθρπρθ++--===-=-因为点,在直线上,所以②将①代入②,得,即.这就是点的轨迹方化为直角坐标方程为因此点的轨迹是以,为圆心,为程.半径的圆.()()22222111122 2.22(2)4422114246 4.422()2sin 2cos 2OSP A B S S S AB G ONG πππππππρρραϕραα=⨯⨯-⨯=-=⨯⨯--==⨯+⨯⨯-=-+∠===+弓形阴影部分由已知,所以,故所求面积设的中点解为,,,由题意知析:,,2sin cos sin sin 5522sin 2cos sin()sin sin 2sin cos sin()sin 2cos sin 3sin cos 0sin 0tan 3.ON OG OGN OGN ONG ϕϕααπαϕϕϕαααϕααααααα==∆=∠∠+=--+==++-=≠=在中,,即,所以,化简得,又因为,所以()()(6cos 3sin )()6,00,3C C G x y A B θθ:由动点在椭圆上运动,可设的坐标为,,点的坐标为,.依题意可知,,由重心坐标解析公式可知,()2222606cos 222cos cos 32033sin 1sin 1sin 3(2)114x x y y x y θθθθθθ++⎧-==+⎧⎪=⎪⎪⎨⎨++⎪⎪-===+⎩⎪⎩-++-=①,由此得,②①②,得即为所求.。