ANSYS自适应网格划分
- 格式:doc
- 大小:117.50 KB
- 文档页数:7
Ansys⽹格划分功能简介Ansys⽹格划分功能简介第⼀讲1、⾸先确定单元形状:Mshape,key,dimensionDimension:2D or 3D,对与2D(3D)来说,key=0,四边形(六⾯体)单元,key=1,三⾓形(四⾯体)单元。
2、确定单元的划分⽅式(free or mapped)Mshkey, value,其中value=1,mapped划分⽅式,value=0,free,value=2,尽量mapped,如果不可以,进⾏free.3、中节点的设置:mshmid对与mapped的划分⽅式是⼤家最喜欢的,优点不⽐多说。
⾸先说⼀下(area)的mapped的划分⽅式:●基本条件:(1)⾯有三条或四条线组成(2)对边划分相等的等份,或者符合过度模式(transition pattern).(3)若是三条线组成的⾯,所有边必须等份。
满⾜三者之⼀,可以采⽤mapped⽅式,进⾏area⽹格划分。
若⾯有多余四条的线组成:可以采⽤:lcomb(推荐⾸先采⽤)或lccat变成四条。
对于线、⾯、体上的keypoint,ansys在划分⽹格时,将有节点设置。
●Transition pattern(过度模式)对于⾯来说,有两种过度模式可选(以有四条线组成的⾯为例):第⼀种:满⾜条件:对边的等分份数之差必须相等。
第⼆种:满⾜条件:⼀组对边等分份数相等,另⼀组对边等分份数之差为偶数(even number)其次,体(volume)的mapped⽅式划分⽅法(单元形状只能采⽤六⾯体形状):●基本条件:(1)体必须有六个⾯、五个⾯、或者四个⾯构成(2)若是六个⾯,必须是对边等分份数相等(3)五⾯体的边(edge)必须等分,上下底⾯的边必须偶数等分(4)四⾯体上所有的边必须偶数等分。
若不满⾜上述条件,可以采⽤aadd或accat将⾯连接,若有线需要连接,先对⾯进⾏,然后对线进⾏lccat.●体的过渡模式主要把⾯的过度模式理解清楚,可以很容易的理解体的过度模式。
ANSYS/LS-DYNA自适应网格划分在金属成形和高速撞击分析中,物体要经历很大的塑性变形。
单积分点显式单元,常用于大变形,但是在这种情况下,由于单元纵横比不合适可能给出不精确的结果。
为了解决这一问题,ANSYS/LS-DYNA程序可以在分析过程中自动重新划分表面来改善求解精度。
这一功能,即自适应网格划分,由EDADAPT 和EDCADAPT 命令控制。
EDADAPT 命令在一个指定的PART内激活自适应网格划分。
(用EDPART 命令创建或显示有效PART IDs),例如,为了给PART1打开自适应网格划分,可以执行下列命令:EDADAPT,1,ON注意—自适应网格划分功能仅对包含SHELL163单元的部件有效。
当此项功能打开时,分析中该部件的网格将自动重新生成。
从而保证在整个变形过程中有合适的单元纵横比。
自适应网格划分一般应用在大变形分析例如金属变形中(调节网格最典型的应用是板料)。
在一个模型中要在多个部件上应用此功能,必须对每个不同的PART ID执行EDADAPT 命令。
缺省时,该功能是关闭的。
在指定哪些部件重新划分后,必须用EDCADAPT 命令定义网格划分参数。
采用EDADAPT 命令定义需要网格划分的所有PART ID号,用EDCADAPT 命令对其设置控制选项。
EDCADAPT 命令控制的参数如下所示:·Frequency(FREQ)-调节自适应网格划分的时间间隔。
例如,假设FREQ设置为0.01,如果单元变形超过指定的角度容差,则其将每隔0.01秒被重新划分一次(假设时间单位为秒)。
因为FREQ的缺省值为0.0,所以在分析中应用自适应网格划分时必须指定此项。
·Angle Tolerance(TOL)-对于自适应网格划分(缺省值为1e31)有一个自适应角度公差。
TOL域控制着单元间的纵横比,它对保证结果的精度是非常重要的,如果单元之间的相对角度超过了指定的TOL值,单元将会被重新划分。
第 3章 ANSYS 13.0 Workbench网格划分及操作案例网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。
网格直接影响到求解精 度、求解收敛性和求解速度。
此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。
因此,一个越好的自动化网格工具,越能得到好的解决方案。
3.1 ANSYS 13.0 Workbench 网格划分概述ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。
此外,变化参数可以得到即时更新的网 格。
ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。
网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。
可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。
在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。
ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。
作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFXMESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。
【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。
不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。
旗开得胜第三章自适应网格划分何为网格自适应划分?ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。
(误差估计在ANSYS Basic Analysis Procedures Guide第五章中讨论。
)通过这种误差估计,程序可以确定网格是否足够细。
如果不够的话,程序将自动细化网格以减少误差。
这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值(或直到用户指定的最大求解次数)。
自适应网格划分的先决条件ANSYS软件中包含一个预先写好的宏,ADAPT.MAC,完成自适应网格划分的功能。
用户的模型在使用这个宏之前必须满足一些特定的条件。
(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。
)这些要求包括:标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。
模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。
而且单元的能量误差是受材料弹性模量影响的。
因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。
在模型中同样应该避免壳厚突变,这也可能造成在应力平均是发生问题。
模型必须使用支持误差计算的单元类型。
(见表3-1)模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。
表3-1 自适应网格划分可用单元2-D Structural Solids1旗开得胜PLANE2 2-D 6-Node Triangular SolidPLANE25 Axisymmetric Harmonic SolidPLANE42 2-D 4-Node Isoparametric SolidPLANE82 2-D 8-Node SolidPLANE83 Axisymmetric Harmonic 8-Node Solid3-D Structural SolidsSOLID45 3-D 8-Node Isoparametric SolidSOLID64 3-D Anisotropic SolidSOLID73 3-D 8-Node Solid with Rotational DOFSOLID92 3-D 10-Node Tetrahedral SolidSOLID95 3-D 20-Node Isoparametric Solid3-D Structural ShellsSHELL43 Plastic quadrilateral ShellSHELL63 Elastic Quadrilateral ShellSHELL93 8-Node Isoparametric Shell2-D Thermal SolidsPLANE35 2-D 6-Node Triangular SolidPLANE75 Axisymmetric Harmonic SolidPLANE55 2-D 4-Node Isoparametric SolidPLANE77 2-D 8-Node SolidPLANE78 Axisymmetric Harmonic 8-Node Solid3-D Thermal SolidsSOLID70 3-D 8-Node Isoparametric SolidSOLID87 3-D 10-Node Tetrahedral SolidSOLID90 3-D 20-Node Isoparametric Solid23-D Thermal ShellsSHELL57 Plastic Quadrilateral Shell如何使用自适应网格划分:基本过程进行自适应网格划分的基本过程包括如下步骤:1.象其他线性静力分析或稳态热分析一样,先进入前处理器(/PREP7或Main Menu>Preprocessor)。
ANSYS高级分析-自适应网格1 引言当面对一个具体需要分析的问题时,往往无法确定什么样的网格密度能够得到满足需要的结果。
基于这一点考虑,ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。
通过这种误差估计,ANSYS可以确定网格是否足够细。
如果结果误差超出预期,程序将自动细化网格以减少误差。
这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值。
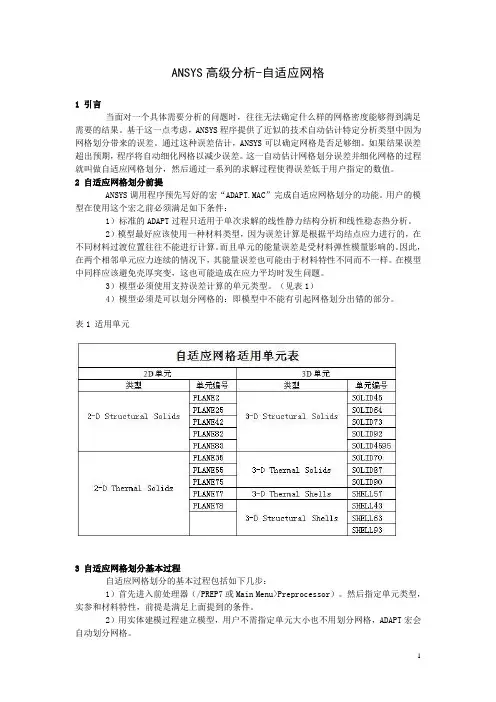
2 自适应网格划分前提ANSYS调用程序预先写好的宏“ADAPT.MAC”完成自适应网格划分的功能。
用户的模型在使用这个宏之前必须满足如下条件:1)标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。
2)模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。
而且单元的能量误差是受材料弹性模量影响的。
因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。
在模型中同样应该避免壳厚突变,这也可能造成在应力平均时发生问题。
3)模型必须使用支持误差计算的单元类型。
(见表1)4)模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。
表1 适用单元3 自适应网格划分基本过程自适应网格划分的基本过程包括如下几步:1)首先进入前处理器(/PREP7或Main Menu>Preprocessor)。
然后指定单元类型,实参和材料特性,前提是满足上面提到的条件。
2)用实体建模过程建立模型,用户不需指定单元大小也不用划分网格,ADAPT宏会自动划分网格。
3)在PREP7中或在SOLUTION(/SOLU或Main Menu>Solution)中指定分析类型,分析选项,载荷和载荷步选项。
在一个载荷步中仅施加实体模型荷载和惯性荷载(加速度,角加速度和角速度)。
4)如果在PREP7中,退出前处理器[FINISH]。

ANSYS 入门教程(5) - 网格划分技术及技巧之网格划分技术及技巧、网格划分控制及网格划分高级技术第 3 章网格划分技术及技巧3。
1 定义单元属性单元类型 / 实常数 / 材料属性 / 梁截面 / 设置几何模型的单元属性3。
2 网格划分控制单元形状控制及网格类型选择 / 单元尺寸控制 / 内部网格划分控制 / 划分网格3。
3 网格划分高级技术面映射网格划分 / 体映射网格划分 / 扫掠生成体网格 / 单元有效性检查 / 网格修改3.4 网格划分实例基本模型的网格划分 / 复杂面模型的网格划分 / 复杂体模型的网格划分创建几何模型后,必须生成有限元模型才能分析计算,生成有限元模型的方法就是对几何模型进行网格划分,网格划分主要过程包括三个步骤:⑴定义单元属性单元属性包括:单元类型、实常数、材料特性、单元坐标系和截面号等。
⑵定义网格控制选项★对几何图素边界划分网格的大小和数目进行设置;★没有固定的网格密度可供参考;★可通过评估结果来评价网格的密度是否合理。
⑶生成网格★执行网格划分,生成有限元模型;★可清除已经生成的网格并重新划分;★局部进行细化。
3。
1 定义单元属性一、定义单元类型1。
定义单元类型命令:ET, ITYPE, Ename, KOP1, KOP2, KOP3, KOP4, KOP5, KOP6, INOPR ITYPE —用户定义的单元类型的参考号。
Ename —ANSYS 单元库中给定的单元名或编号,它由一个类别前缀和惟一的编号组成,类别前缀可以省略,而仅使用单元编号。
KOP1~KOP6 - 单元描述选项,此值在单元库中有明确的定义,可参考单元手册。
也可通过命令KEYOPT进行设置。
INOPR —如果此值为 1 则不输出该类单元的所有结果。
例如:et,1,link8 !定义 LINK8 单元,其参考号为 1;也可用 ET,1,8 定义et,3,beam4 ! 定义 BEAM4 单元,其参考号为 3;也可用 ET,3,4 定义2. 单元类型的 KEYOPT命令:KEYOPT, ITYPE, KNUM, VALUEITYPE - 由ET命令定义的单元类型参考号。
ANSYS各种网格划分方法1. 三角剖分法(Triangular Meshing):三角剖分法是一种常见的二维网格划分方法,它将几何体分割成一系列的三角形单元。
在ANSYS中,可以使用自动网格划分工具或手动方式进行三角剖分。
自动网格划分工具会根据所选几何体的复杂程度自动生成合适的三角形网格。
手动方式允许用户通过在几何体上添加特定的边界条件和限制条件来控制网格划分过程。
2. 四边形网格法(Quadrilateral Meshing):四边形网格法是一种常用的二维网格划分方法,它将几何体划分成一系列的四边形单元。
与三角形网格相比,四边形网格具有更好的数值特性和简化后处理的优势。
在ANSYS中,使用四边形网格法可以通过自动网格划分工具或手动方式进行划分。
3. 符号表示(Sweeping):符号表示是一种常用的三维网格划分方法,它通过将二维几何体沿特定方向移动来创建三维几何体的网格。
在ANSYS中,可以使用自动网格划分工具或手动方式进行符号表示。
自动网格划分工具可以根据选择的几何体自动生成符号表示网格。
手动方式允许用户根据需要指定几何体的边界条件和限制条件。
4. 细化网格法(Refinement):细化网格法是一种常用的网格划分方法,它通过逐步细化初步生成的网格来提高网格质量和分析精度。
在ANSYS中,用户可以通过自动细化工具或手动方式进行网格细化。
自动细化工具会根据预设的条件和几何体特征进行自动细化。
手动方式允许用户根据需要在特定区域添加额外的网格细化操作。
5. 自适应网格法(Adaptive Meshing):自适应网格法是一种根据分析需求自动调整网格划分的方法。
在ANSYS中,自适应网格法可以根据解的梯度、误差估计或特定的物理现象进行自动网格调整。
该方法可以显著减少有限元计算中的计算量,提高求解效率和准确性。
总结:ANSYS提供了多种网格划分方法,包括三角剖分法、四边形网格法、符号表示、细化网格法和自适应网格法。
ANSYS程序提供了使用便捷、高质量的对几何模型进行网格划分的功能。
主要包括4种网格划分方法:自由网格划分、映射网格划分、延伸网格划分和自适应网格划分。
(1)自由网格划分ANSYS程序的自由网格划分功能十分强大,这种网格划分方法没有单元形状的限制,网格也不遵循任何模式,因此适合于对复杂形状的面和体进行网格划分,这就避免了用户对模型各个部分分别划分网格后进行组装时各部分网格不匹配带来的麻烦。
对面进行网格划分,自由网格可以只有四边形单元组成,或者只有三角形单元组成,或者二者混合。
对体进行自由网格划分,一般指定网格为四面体单元、六面体单元作为过渡,也可以加入到四面体网格中。
若要严格定义单元形状,可通过以下方法实现。
Command:MSHAPE、MSHKEYGUI:Main Menu︱Preprocessor︱Meshing︱Mesher Opts(2)映射网格划映射网格划分允许用户将几何模型分解成简单的几部分,然后选择合适的单元属性和网格控制,生成映射网格,映射网格划分主要适合于规则的面和体,单元成行并具有明显的规则形状,仅适用于四边形单元(对面)和六面体(对体)。
图2.7所示为映射网格划分结果显示。
(3)延伸网格划分延伸网格划分可将一个二维网格延伸成一个三维网格,主要是利用体扫掠,从体的某一边界面扫掠贯穿整个体而生成体单元。
如果需扫掠的面由三角形网格组成,体将生成四面体单元,如果面网格由四边形网格组成,体将生成六面体单元,如果面由三角形和四边形单元共同组成,则体将由四面体和六面体单元共同填充。
(4)自适应网格划分自适应网格划分是在生成了具有边界条件的实体模型以后,用户指示程序自动地生成有限元网格,分析、估计网格的离散误差,然后重新定义网格大小,再次分析计算、估计网格的离散误差,直至误差低于用户定义的值或达到用户定义的求解次数。

ANSYS基础教程——网格划分关键字:ANSYS ANSYS教程网格划分信息化调查找茬投稿收藏评论好文推荐打印社区分享本文将详细介绍网格划分的3个步骤并讨论网格划分的其他选项.内容包括:多种单元属性、控制网格密度、改变网格、映射网格划分、过渡网格划分、网格的拖拉、扫掠网格划分及实践。
·网格划分包含以下3个步骤:–定义单元属性–指定网格的控制参数–生成网格A. 多种单元属性·如前所述, 每个单元有以下与之相关的属性:–单元类型(TYPE)–实常数(REAL)–材料特性(MAT)·许多FEA模型有多种属性. 例如,下图所示的筒仓有两种单元类型, 三种实常数, 以及两种材料.·只要您的模型中有多种单元类型(TYPEs), 实常数(REALs) 和材料(MATs), 就必须确保给每一种单元指定了合适的属性. 有以下3种途径:–在网格划分前为实体模型指定属性–在网格划分前对MAT, TYPE,和REAL进行“总体的”设置–在网格划分后修改单元属性·如果没有为单元指定属性, ANSYS将MAT=1, TYPE=1, 和REAL=1作为模型中所有单元的缺省设置. 注意, 采用当前激活的TYPE, REAL, 和MAT 进行网格操作.为实体模型指定属性1.定义所有需要的单元类型,材料, 和实常数.2.然后使用网格工具的“单元属性”菜单条(Preprocessor > MeshTool):–选择实体类型后按SET键.–拾取您想要指定属性的实体.–在后续的对话框设置适当的属性.或选择需要的实体,使用VATT, AATT, LATT, 或KATT命令.3.当您为实体划分网格时, 它的属性将自动转换到单元上.使用总体的属性设置1.定义所有需要的单元类型,材料, 和实常数.2.然后使用网格工具的“单元属性”菜单条(Preprocessor > MeshTool):–选择Global后按SET 键.–在“网格划分属性”对话框中激活需要的属性组合. 这些被视为激活的TYPE, REAL,和MAT 设置.或使用TYPE, REAL, 和MAT命令.3.仅对使用上述设置属性的实体划分网格.修改单元属性1.定义所有需要的单元类型,材料, 和实常数.2.激活需要的TYPE, REAL, 和MAT设置的组合:–Preprocessor > -Attributes-Define > Default Attribs...–或使用TYPE, REAL,和MAT命令3.仅修改使用上述设置属性的单元的属性:–使用EMODIF,PICK命令或选择Preprocessor > Move/Modify > -Elements-Modify Attrib–拾取需要的单元4.在后续的对话框,将属性设置为“All to current.”牢记以下几点:·您可以激活属性编号校核单元属性:–Utility Menu > PlotCtrls> Numbering–或用/PNUM,attr,ON命令,attr可以是TYPE, MAT, 或REAL·在实体模型上直接指定属性将不考虑缺省属性.·在实体模型上指定属性, 您可以避免在网格划分操作中重新设置属性. 由于ANSYS 的网格划分算法在一次对所有实体进行网格划分时更为有效,因而这种方法更为优越.·清除实体模型上的网格将不会删除指定的单元属性.B. 控制网格密度·ANSYS 提供了多种控制网格密度的工具, 既可以是总体控制也可以是局部控制:–总体控制·智能网格划分·总体单元尺寸·缺省尺寸–局部控制·关键点尺寸·线尺寸·面尺寸智能网格划分·通过指定所有线上的份数决定单元的尺寸, 它可以考虑线的曲率, 孔洞的接近程度和其它特征, 以及单元阶次.·智能网格划分的缺省设置是关闭, 在自由网格划分时建议采用智能网格划分。
ANSYS网格划分详细介绍ANSYS网格划分详细介绍众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。
在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。
在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。
一、自由网格划分自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。
通常情况下,可利用ANSYS 的智能尺寸控制技术(SMARTSIZE命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。
对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。
同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。
如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非退化的四面体单元,减少每个单元的节点数量,提高求解效率。
在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。
对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。
ANSYS中的⽹格划分控制⾃由⽹格和映射⽹格划分控制⼀.⾃由⽹格划分⾃由⽹格划分操作,对实体模型⽆特殊要求。
任何⼏何模型,尽管是不规则的,也可以进⾏⽹格划分。
所⽤单元形状依赖于是对⾯还是对体进⾏⽹格划分。
对⾯进⾏⽹格划分,⾃由⽹格可以只由四边形单元组成,或只由三⾓形单元组成,或两者混合。
对体进⾏划分,⾃由⽹格⼀般限定为四⾯体单元。
棱锥形单元作为过渡也可加⼊到四⾯体⽹格中。
如果选择的单元类型严格地限定为三⾓形或四⾯体(例如PLANE2和SOL192),程序在⽹格划分时只⽤这种单元。
但是,如果选择的单元类型允许多于⼀种形状(如,PLANE82或SOLID95),可通过下列⽅法指定⽤哪⼀种(或⼏种)形状:命令:MSHAPEGUI:Main Menu>Preprocessor>Meshing-Mesher Opts还必须指定对此模型⽤⾃由⽹格划分:命令:MSHKEY,0GUI:Main Menu>Preprocessor>Meshing-Mesher Opts对于⽀持多于⼀种形状的⾯单元,缺省地会⽣成混合形状(通常是四边形单元占多数)。
可⽤[MSHAPE,1,2D和MSHKEY,0]来要求全部⽣成三⾓形⽹格,但如果⽤低次单元时建议不要这样做。
注意:可能会遇到全部⽹格都必须为四边形⽹格的情况。
当⾯边界上总的线分割数为偶数时,⾯的⾃由⽹格划分会全部⽣成四边形⽹格,并且四边形单元质量不会出错。
通过打开SmartSizing项并让它来决定合适的单元数,可以增加⾯边界线分割总数为偶数的机率(⽽不是通过LESIZE命令⼈⼯设置任何边界划分的单元数)。
应保证四边形分裂项关闭[MOPT,SPLIT,OFF],以使ANSYS不将形状较差的四边形单元分裂成三⾓形(四边形单元分裂时出错单元缺省是打开的。
参见MOPT命令的叙述)。
使体⽣成⼀种⾃由⽹格,应当选择只允许⼀种四⾯体形状的单元类型,或利⽤⽀持多种形状的单元并只设四⾯体⼀种形状功能[MSHAPE,1,3D和MSHKEY,0]。
关于ansys软件的网格划分技术众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。
在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。
在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。
一、自由网格划分自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。
通常情况下,可利用ANSYS的智能尺寸控制技术(SMARTSIZE命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。
对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。
同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。
如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG 命令将模型中的退化形式的四面体单元变化为非退化的四面体单元,减少每个单元的节点数量,提高求解效率。
在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。
对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。
ANSYS自适应网格划分(1)何为网格自适应划分?ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。
(误差估计在ANSYS Basic Analysis Procedures Guide第五章中讨论。
)通过这种误差估计,程序可以确定网格是否足够细。
如果不够的话,程序将自动细化网格以减少误差。
这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值(或直到用户指定的最大求解次数)。
自适应网格划分的先决条件ANSYS软件中包含一个预先写好的宏,ADAPT.MAC,完成自适应网格划分的功能。
用户的模型在使用这个宏之前必须满足一些特定的条件。
(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。
)这些要求包括:标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。
模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。
而且单元的能量误差是受材料弹性模量影响的。
因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。
在模型中同样应该避免壳厚突变,这也可能造成在应力平均是发生问题。
模型必须使用支持误差计算的单元类型。
模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。
自适应网格划分可用单元2-D Structural SolidsPLANE2 2-D 6-Node Triangular SolidPLANE25 Axisymmetric Harmonic SolidPLANE42 2-D 4-Node Isoparametric SolidPLANE82 2-D 8-Node SolidPLANE83 Axisymmetric Harmonic 8-Node Solid3-D Structural SolidsSOLID45 3-D 8-Node Isoparametric SolidSOLID64 3-D Anisotropic SolidSOLID73 3-D 8-Node Solid with Rotational DOFSOLID92 3-D 10-Node Tetrahedral SolidSOLID95 3-D 20-Node Isoparametric Solid3-D Structural ShellsSHELL43 Plastic quadrilateral ShellSHELL63 Elastic Quadrilateral ShellSHELL93 8-Node Isoparametric Shell2-D Thermal SolidsPLANE35 2-D 6-Node Triangular SolidPLANE75 Axisymmetric Harmonic SolidPLANE55 2-D 4-Node Isoparametric SolidPLANE77 2-D 8-Node SolidPLANE78 Axisymmetric Harmonic 8-Node Solid3-D Thermal SolidsSOLID70 3-D 8-Node Isoparametric SolidSOLID87 3-D 10-Node Tetrahedral SolidSOLID90 3-D 20-Node Isoparametric Solid3-D Thermal ShellsSHELL57 Plastic Quadrilateral ShellANSYS自适应网格划分(2)如何使用自适应网格划分:基本过程进行自适应网格划分的基本过程包括如下步骤:1. 象其他线性静力分析或稳态热分析一样,先进入前处理器(/PREP7或Main Menu>Preprocessor)。
然后指定单元类型,实参和材料特性,要满足上面提到的条件。
2. 用实体建模过程建立模型,用可以划分网格的面或体建模。
用户不需指定单元大小也不用划分网格,ADAPT宏会自动划分网格。
(如果要同时划分面和体网格,生成ADAPTMSH.MAC用户子程序-见后。
)3. 在PREP7中或在SOLUTION(/SOLU或Main Menu>Solution)中指定分析类型,分析选项,载荷和载荷步选项。
在一个载荷步中仅施加实体模型荷载和惯性荷载(加速度,角加速度和角速度)。
(通过ADAPTBC.MAC用户子程序可以施加有限单元载荷,固连和约束方程。
通过ADAPTSOL.MAC用户子程序可以加入多个载荷步。
这些子程序在后面还要讨论。
)4. 如果在PREP7中,退出前处理器[FINISH]。
(可以在SOLUTION或在初始状态下激活ADAPT宏)。
5. 用下列方法激活自适应求解。
Command: ADAPTGUI: Main Menu>Solution>Adaptive Mesh注意,可以在热或结构分析中使用ADAPT宏,但不能在一次自适应分析中同时进行这两种不同类型的计算。
在自适应网格划分的迭代过程中,单元的大小将作调整(在FACMN和FACMX指定的范围内)以减小或增加单元能量误差,直到误差满足指定的数值(或指定的最大求解次数)为止。
6. 当自适应网格计算收敛时,程序自动将单元形状检查打开[SHPP,ON]。
然后返回SOLUTION或初始状态,这取决于激活ADAPT的状态。
接下来可以进入POST1用标准操作进行后处理。
修改基本过程选择自适应性如果用户清楚某个部分网格划分的误差相对影响较小时(如应力水平较低且变化较小),可以将这些区域从自适应网格划分中排除以加快分析速度。
同样,用户也许想将接近应力奇异点的部分(如集中载荷)排除掉。
选择逻辑操作可以解决这类问题。
图片1 选择自适应能改进有应力集中的模型如果用户选择了一个关键点集,ADAPT宏仍将包含进所有的关键点(在选择的和未选择的关键点都作网格改动),除非将ADAPT命令(MainMenu>Solution>Adaptive Mesh)中KYKPS设为1。
如果用户选择了一个面或体集,ADAPT宏将只在选择的区域调整网格大小。
此时必须在激活ADAPT宏之前在PREP7中对整个模型进行网格划分。
ANSYS自适应网格划分(3)-用户子程序用用户子程序定制ADAPT宏标准的ADAPT宏并不能满足特定的分析需要。
例如,用户可能想同时对面和体进行网格划分,这在标准宏当中是不可以的。
对于这种或其他一些类似情况,可以对ADAPT宏进行修改使之适用于特定的分析。
ANSYS程序用宏这种方式完成自适应网格划分,本身就使得用户可以对其进行相应的修改以适应不同的要求。
方便的是,用户不用总是通过修改ADAPT代码的方式来定制宏。
宏的三个部分可以用用户子程序的方法来修改,这个方法将ADAPT宏和用户文件分开,用户可以生成子程序由ADAPT宏来调用。
这三个部分是:网格划分命令序列,边界条件命令序列和求解命令序列。
相应的用户子程序名为ADAPTMSH.MAC,ADAPTBC.MAC和ADAPTSOL.MAC。
下面看一下这三个子程序的功能:生成用户网格划分子程序(ADAPTMSH.MAC)缺省情况下,如果模型中包含一个或多个体时,ADAPT宏将只对体划分网格而不对面进行划分。
如果当前选择集中没有体,宏才对面进行划分。
如果要同时对面和体进行划分的话,就要生成用户子程序ADAPTMSH.MAC来提供相应的操作。
在重新划分网格之前要清楚所有这些实体中划分过网格的实体。
子程序大致如下:C*** Subroutine ADATMSH.MAC-Your name-Job Name-Data CreatedTYPE,1 !指定划分网格的单元类型属性ACLEAR,3,5,2 !清除本程序中要重新划分网格的面和体的网格VCLEAR,ALLAMESH,3,5,2 !对面3和5划分网格(ADAPT不对其他面划分网格)TYPE,2 !改变单元类型,划分体VMESH,ALL !对所有体划分网格请查阅TYPE,ACLEAR,VCLEAR,AMESH和VMESH命令得到更详细的解释。
我们建议将C***行包含在文件中以区别不同的宏。
这一行将在任务的输出中出现,就可以确认ADAPT宏正确地调用了用户子程序。
生成用户边界条件子程序(ADAPTBC.MAC)ADAPT宏在每次求解循环时都要清除并重新划分网格,因此模型的结点和单元也要不断的改变。
这就使得所有的有限单元载荷,自由度固连,约束方程等施加在结点和单元的边界条件都不能使用。
如果要包含这些有限单元约束时,就要使用用户子程序,ADAPTBC.MAC。
在这个子程序中,可以选择结点然后定义有限单元载荷,自由度固连和约束方程。
下面是一个ADAPTBC.MAC的例子:C*** Subroutine ADAPTBC.MAC-Your name-Hob Name-Data CReatedNSEL,S,LOC,X,0 !选择X坐标为0的结点D,ALL,UX,0 !令选择的所有结点UX为0NSEL,S,LOC,Y,0 !选择Y坐标为0的结点D,ALL,UX,0 !令选择的所有结点UY为0NSEL,ALL !选择所有结点生成用户求解子程序(ADAPTSOL.MAC)ADAPT宏中的求解命令序列很简单:/SOLUSOLVEFINISH这个缺省的命令序列只能求解单个载荷步。
用户可以将其他的命令序列加入用户子程序ADAPTSOL.MAC中。
关于用户子程序的一些其他说明用户可以象生成其他文件一样生成这些子程序。
就是说可以用APDL语言的*CREATE命令(Utility Menu>Macro>Create Macro)和APDL的*END命令,也可以用外部的文件编辑器。
当ADAPT宏调用这些子程序时,软件先搜索ANSYS根目录,再搜索用户根目录,最后是当前目录。
因此,要确保其他目录中不包括与所用文件同名的文件。
解释行(C***)会在输出文件中出现,可以通过它来检查是否使用了正确的文件。
另外,通过在运行ADAPT宏之前用/PSEARCH,OFF(Utility Menu>Macro>Macro Search Path)指定软件只搜索ANSYS根目录和用户当前目录可以从某种程度上减少文件混用的可能。
不管这些子程序在什么位置,它们都能被找到,除非将ADAPT命令的KYMAC选项设为1。
定制ADAPT宏(UADAPT.MAC)有些情况下用户需要修改ADAPT宏但不能通过单独的用户子程序的方式,那么就需要直接修改ADAPT宏的主体。