第6章 控制系统的设计(j)
- 格式:ppt
- 大小:3.22 MB
- 文档页数:45
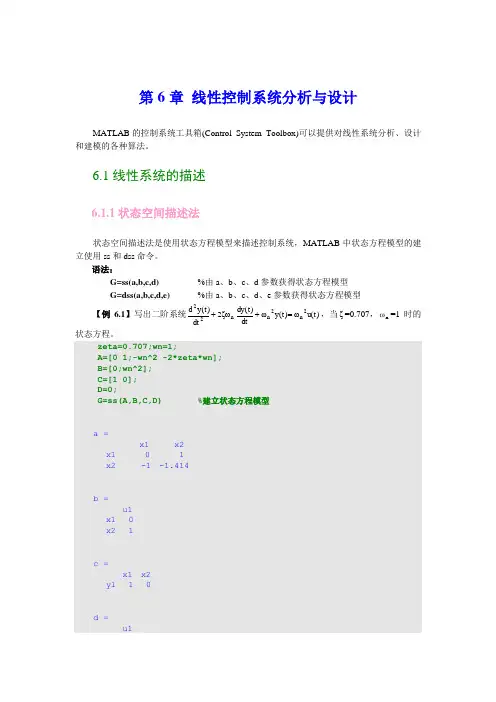
第6章 线性控制系统分析与设计MATLAB 的控制系统工具箱(Control System Toolbox)可以提供对线性系统分析、设计和建模的各种算法。
6.1线性系统的描述6.1.1状态空间描述法状态空间描述法是使用状态方程模型来描述控制系统,MATLAB 中状态方程模型的建立使用ss 和dss 命令。
语法:G=ss(a,b,c,d) %由a 、b 、c 、d 参数获得状态方程模型G=dss(a,b,c,d,e) %由a 、b 、c 、d 、e 参数获得状态方程模型【例6.1】写出二阶系统u(t)ωy(t)ωdtdy(t)2ζdt y(t)d 2n 2n n 22=+ω+,当ζ=0.707,n ω=1时的状态方程。
zeta=0.707;wn=1;A=[0 1;-wn^2 -2*zeta*wn];B=[0;wn^2];C=[1 0];D=0;G=ss(A,B,C,D) %建立状态方程模型a =x1 x2x1 0 1x2 -1 -1.414b =u1x1 0x2 1c =x1 x2y1 1 0d =u1y1 0Continuous-time model.6.1.2传递函数描述法MATLAB中使用tf命令来建立传递函数。
语法:G=tf(num,den) %由传递函数分子分母得出说明:num为分子向量,num=[b1,b2,…,b m,b m+1];den为分母向量,den=[a1,a2,…,a n-1,a n]。
【例6.1续】将二阶系统描述为传递函数的形式。
num=1;den=[1 1.414 1];G=tf(num,den) %得出传递函数Transfer function:1-----------------s^2 + 1.414 s + 16.1.3零极点描述法MATLAB中使用zpk命令可以来实现由零极点得到传递函数模型。
语法:G=zpk(z,p,k) %由零点、极点和增益获得说明:z为零点列向量;p为极点列向量;k为增益。

第六章选择性控制系统6.1 概述所有控制系统可分为三类:物料平衡(或能量平衡)控制,质量控制和极限控制。
选择性控制属于极限控制一类。
它的特点是:在正常工况下,该参数不会超限,所以也不考虑对它进行直接控制;而在非常工况下,该参数会达到极限值,这时又要求采取强有力的控制手段,避免超限。
选择性控制系统又叫取代控制,也称超驰控制。
生产保护性措施的分类:硬保护和软保护1.硬保护参数达到第一极限时报警→设法排除故障→若没有及时排除故障,参数值会达到更严重的第二极限,经连锁装置动作,自动停车。
达到保护生产的目的。
2.软保护参数达到第一极限时报警→设法排除故障→在这同时,改变操作方式,按使该参数脱离极限值为主要控制目标进行控制,以防该参数进一步超限。
这种操作方式一般会使原有的控制质量降低,但能维持生产的继续运转,避免了停车。
当生产操作趋向极限条件时,用于控制不安全情况的控制系统将取代正常情况下工作的控制方案,直到生产操作重新回到安全范围时,正常情况下的控制方案又恢复对生产过程的正常控制。
要构成选择性控制,生产操作必须有一定选择性逻辑关系。
而选择性控制的实现则需要具有选择功能的自动选择器(高值选择器和低值选择器)或有关切换装置来完成。
6.2选择性控制系统的类型及应用6.2.1 开关型选择性控制系统定义:一般设有A、B两个可供选择的变量。
其中A是工艺操作的主要指标;另一个变量B,工艺上对它只有一个限值要求。
当B工作在限值以内时,生产过程按变量A进行连续控制,当B达到或超过限值时,选择控制系统将通过专门的装置切断A的输出,而控制阀迅速关闭或打开,直到B回到限值内,系统才重新恢复到按变量A进行连续控制。
开关型选择性控制系统一般都用作系统的限值保护。
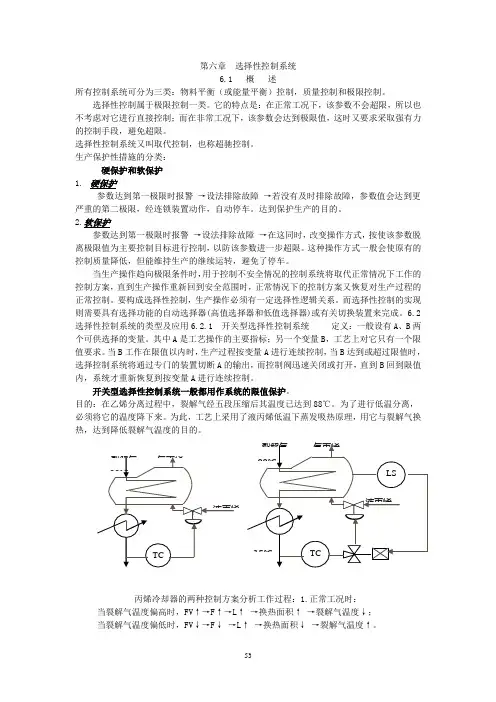
目的:在乙烯分离过程中,裂解气经五段压缩后其温度已达到88℃。
为了进行低温分离,必须将它的温度降下来。
为此,工艺上采用了液丙烯低温下蒸发吸热原理,用它与裂解气换热,达到降低裂解气温度的目的。