电机与拖动基础及MATLAB仿真绪论
- 格式:ppt
- 大小:9.16 MB
- 文档页数:44
MATLAB仿真技术在《电机与拖动基础》教学的应用刘素芳;刘素芬【摘要】MATLAB在电机与拖动基础教学中有着十分重要的作用,诸如参数计算、曲线描绘和仿真等,文章以实例说明之.【期刊名称】《张家口职业技术学院学报》【年(卷),期】2008(021)004【总页数】3页(P61-63)【关键词】MATLAB;仿真;应用【作者】刘素芳;刘素芬【作者单位】张家口职业技术学院,河北张家口,075000;大同矿务局永定庄矿二校,山西大同,037000【正文语种】中文【中图分类】TP3191.绪论电机与拖动是电气工程及其自动化、自动化专业的一门重要专业基础课程,也是该专业后续课程《电力拖动控制系统》、《现代交流调速》学习的基础。
它涉及电磁学、动力学及数学等多门学科,概念多、理论性强和工程实践联系密切。
知识面广,内容多,尤其是工程实际知识多,用传统的课堂讲授方式来讲授这门课的最大问题在于:很难用大量的图片来介绍各种旋转电机、变压器的结构,也难以用清晰、清洁的各种波形、图形来讲授诸如旋转磁场、绕组结构和电动机过渡过程等问题。
目前,虽然有很多的实验装置可以对电机及其拖动系统的稳态运行进行较好地测试与观察。
但是,对于电机及其拖动系统的动态过程的观察和测试却不甚理想。
这是因为电机动态过渡过程,时间短、且含有很多非线性因素,常规的仪表和示波器难以满足要求,故只能从理论上定性说明,致使学生远远脱离生产实际,影响了他们对该课程的理论学习。
本文介绍了MATLAB 在电机与拖动基础教学中的主要应用,例如参数计算,曲线描绘和仿真, 并用实例说明MATLAB 软件在电机与拖动基础教学中的重要作用2.MATLAB 仿真工具箱简介MATLAB 是 MathWorks 公司开发的用于数学计算的工具软件。
Simulink 是MATLAB 中的动态仿真工具,它具有强大的矩阵运算能力、简便的绘图功能、可视化的仿真环境。
MATLAB 已成为国际上公认的最优秀数值计算和仿真分析软件。
摘要仿真是对操控系统的参考,探究和实验有着重要的含义,MATLAB编写的语句以及simulation元器件可以进行操控系统仿真,本人用MATLAB最新版本的软件来,写出些经典的直流操控系统实行了模拟实验,出现了不一样模型的图形,对系统做的两种状态的性能实验检查。
对一样的直流电机调节速度系统,可以抽取有传函模行建立系统模形方针,根据电汽构图中建立混在一块的模块系统模形仿真和编写仿真,并阐述了各种方法的特点。
对数字pid掌握算数实行的参考,里面有容易地数字pid掌握算数和不全部积分式,微分分离式两种进行的数字PID掌握算法,探讨了利用仿真技术整理计算机掌握直流电机系统的采样时间和PID参考的方法,以获得优良的系统调速性能。
关键词:MATLAB;仿真;直流电机;调速ABSTRACTSimulation is the reference of control system, has important meaning to explore and experiment, MATLAB statements and simulation components can control system simulation, I use the latest version of the MATLAB software to write some classical dc control system implemented simulation experiment, the different model of graphics, experiments on the performance of the system to do two kinds of state inspection. The dc motor speed regulating system of the same, you can extract a transfer function model line set up system modeling approach, according to the building up of mixed vapor composition in which a module of system modeling simulation and simulation, and expounds the charac teristics of various methods.Reference in digital pid control arithmetic to somewhere inside change of digital pid control arithmetic and not all integral type, differential separate two kinds of digital pid control algorithm, discusses the use of simulation technology of computer control dc motor system sampling time and the method of pid reference, in order to obtain excellent speed regulating performance.Key Words:MATLAB;simulation;DC machine;speed regulation目录摘要 ............................................................................................................................................... I ABSTRACT ..................................................................................................................................... II 目录 . (1)1 绪论 (3)1.1研究的目标与内容 (4)2 MATLAB简介 (5)2.1 MATLAB的发展历程 (5)2.2 MATLAB平台的组成 (6)2.3 MATLAB语言的特点 (7)3 MAT LAB软件在操制系统中的仿真 (9)3.1计算机仿真技术概括 (9)3.2 计算机仿真基本概念 (9)3.3自动控制系统仿真 (9)3.4 MAT LAB在控制系统地仿真功能和含义 (10)3.5控制系统仿真里面常用的函数 (10)4 Simulink基础 (12)4.1 Simulink简介 (12)4.2常用的标准模块 (12)4.3 Simulink主要的仿真模块介绍 (14)5直流电动机直接启动仿真 (16)5.1建立仿真模型 (16)5.2模块参数设置 (16)5.3仿真参数设置 (20)5.4仿真 (20)6直流电动机在电枢串联电阻起动仿真 (22)6.1建立仿真模型 (22)6.2模块参数设置 (23)6.3仿真参数设置 (23)6.4进行仿真 (23)7直流电动机反接制动仿真 (25)7.1建立仿真模型 (26)7.2模块参数设置 (26)7.3仿真参数设置 (26)7.4仿真 (26)8 直流电动机改变励磁电流调速仿真 (28)8.1建立仿真图形 (28)8.2模块参数设置 (28)8.3仿真参数设置 (29)8.4仿真 (29)9直流电动机改变电枢电压调速仿真 (31)9.1建立仿真模型 (31)9.2模块参数设置 (33)9.3仿真参数设置 (33)9.4仿真 (33)10 晶闸管单环直流调速系统的MATLAB仿真................................................ 错误!未定义书签。
4-14 一台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=%,求电动机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-15 一台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-16 已知一台直流电机极对数p=2,槽数Z 和换向片数K 均等于22,采用单叠绕组。
试求:(1)绕组各节距;(2)并联支路数。
解:(1)第一节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第二节距415y 12=-=-=y y(2)并联支路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,气隙每极磁通Φ=×10-2Wb ,试求:(1)采用单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持支路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联支路对数a=p=3,电磁转矩 m N I a pN T a ⋅=⨯⨯⨯⨯⨯=Φ=38.1310021.0314.3240032π 如果把电枢绕组改为单波绕组, 保持支路电流a i 的数值不变,则电磁转矩也不变,仍A U P I N N N N 79.207875.022010403=⨯⨯==ηkWI U P N N 71.4579.2072201=⨯=⨯=A U P I N N N 5.35623010823=⨯==KW P P N 11.911==η为m N ⋅,因为无论是叠绕组还是波绕组,所有导体产生的电磁转矩的方向是一致的,保持支路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。

电力拖动自动控制系统---Matlab仿真实验报告实验一二极管单相整流电路一.【实验目的】1.通过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.通过实验进一步加深理解二极管单向导通的特性。
图1-1二极管单相整流电路仿真模型图二.【实验步骤和内容】1.仿真模型的建立1打开模型编辑窗口;2复制相关模块;3修改模块参数;4模块连接;2.仿真模型的运行1仿真过程的启动;2仿真参数的设置;3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2整流电压输出波形图图1-3整流电流输出波形图图1-4整形电压、电流输出波形图实验二三相桥式半控整流电路一.【实验目的】1.通过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.研究三相桥式半控整流电路整流的工作原理和全过程。
二.【实验步骤和内容】1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:(1)交流电压源参数U=100V,f=25Hz,三相电源相位依次延迟120°。
(2)晶闸管参数Rn=0.001Ω,Lon=0.0001H,Vf=0V,Rs=50Ω,Cs=250e-6F。
(3)负载参数R=10Ω,L=0H,C=inf。
(4)脉冲发生器的振幅为5V,周期为0.04s(即频率为25Hz),脉冲宽度为2。
图2-1三相桥式半控整流电路仿真模型图当α=0°时,设为0.0033s,0.0166s,0.0299s。
图2-2α=0°整流输出电压等波形图当α=60°时,触发信号初相位依次设为0.01s,0.0233s,0.0366s。
图2-3α=60°整流输出电压等波形图三.【实验总结】三相可控整流电路中,最基本的是三相半波可控整流电路,应用最为广泛的是三相桥式全控整流电路、双反星形可控整流电路以及十二脉波可控整流电路等,均可在三相半波的基础上进行分析。
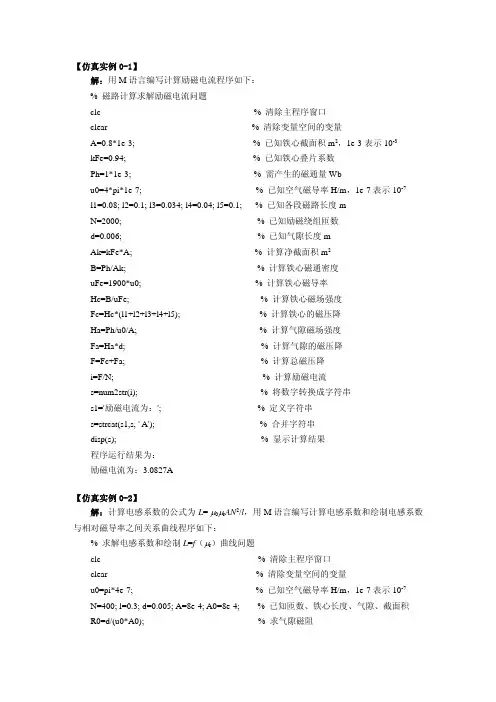
【仿真实例0-1】解:用M语言编写计算励磁电流程序如下:%磁路计算求解励磁电流问题clc%清除主程序窗口clear%清除变量空间的变量A=0.8*1e-3;%已知铁心截面积m2,1e-3表示10-3kFe=0.94;%已知铁心叠片系数Ph=1*1e-3;%需产生的磁通量Wbu0=4*pi*1e-7;%已知空气磁导率H/m,1e-7表示10-7 l1=0.08;l2=0.1;l3=0.034;l4=0.04;l5=0.1;%已知各段磁路长度mN=2000;%已知励磁绕组匝数d=0.006;%已知气隙长度mAk=kFe*A;%计算净截面积m2B=Ph/Ak;%计算铁心磁通密度uFe=1900*u0;%计算铁心磁导率Hc=B/uFe;%计算铁心磁场强度Fc=Hc*(l1+l2+l3+l4+l5);%计算铁心的磁压降Ha=Ph/u0/A;%计算气隙磁场强度Fa=Ha*d;%计算气隙的磁压降F=Fc+Fa;%计算总磁压降i=F/N;%计算励磁电流s=num2str(i);%将数字转换成字符串s1='励磁电流为:';%定义字符串s=strcat(s1,s,'A');%合并字符串disp(s);%显示计算结果程序运行结果为:励磁电流为:3.0827A【仿真实例0-2】解:计算电感系数的公式为L= μ0μr AN2/l,用M语言编写计算电感系数和绘制电感系数与相对磁导率之间关系曲线程序如下:%求解电感系数和绘制L=f(μr)曲线问题clc%清除主程序窗口clear%清除变量空间的变量u0=pi*4e-7;%已知空气磁导率H/m,1e-7表示10-7 N=400;l=0.3;d=0.005;A=8e-4;A0=8e-4;%已知匝数、铁心长度、气隙、截面积R0=d/(u0*A0);%求气隙磁阻for n=1:80;%for循环语句ur(n)=100+(10000-100)*(n-1)/100;%求相对磁导率Rm(n)=l/(ur(n)*u0*A);%求铁心磁阻R=R0+Rm(n);%求计算总磁阻L(n)=N^2/R;%求电感系数end%for循环语句的结束plot(ur,L)%绘制L=f(μr)曲线title('{\itL=f}({\it\mu}_r)关系曲线')%标题'L=f(μr)关系曲线'xlabel('铁心相对磁导率{\it\mu}_r')%设置x坐标标签“铁心相对磁导率μr”ylabel('电感系数{\itL}[H]')%设置y坐标标签“电感系数L[H]”【仿真实例0-3】解:用M语言编写拟合磁化曲线的MATLAB程序如下:%拟合与绘制磁化曲线问题clcclearHdata=[1.38,1.40,1.42,1.44,1.46,1.48,1.50,1.52,1.54,1.56,...1.58,1.60,1.62,1.64,1.66,1.69,1.71,1.74,1.76,1.78,...1.81,1.84,1.86,1.89,1.91,1.94,1.97,2.00,2.03,2.06,...2.10,2.13,2.16,2.20,2.24,2.28,2.32,2.36,2.40,2.45,...2.50,2.55,2.60,2.65,2.70,2.76,2.81,2.87,2.93,2.99,...3.06,3.13,3.19,3.26,3.33,3.41,3.49,3.57,3.65,3.74,...3.83,3.92,4.01,4.11,4.22,4.33,4.44,4.56,4.67,4.80,...4.93,5.07,5.21,5.36,5.52,5.68,5.84,6.00,6.16,6.33,...6.52,6.72,6.94,7.16,7.38,7.62,7.86,8.10,8.36,8.62,...8.90,9.20,9.50,9.80,10.1,10.5,10.9,11.3,11.7,12.1,...12.6,13.1,13.6,14.2,14.8,15.5,16.3,17.1,18.1,19.1,...20.1,21.2,22.4,23.7,25.0,26.7,28.5,30.4,32.6,35.1,...37.8,40.7,43.7,46.8,50.0,53.4,56.8,60.4,64.0,67.8];%磁场强度数据Bdata=0.40:0.01:1.69;%磁感应强度数据len=length(Hdata);%计算数组长度Hmax=Hdata(len);%提取数组最大值a=polyfit(Hdata,Bdata,13);%计算多项式拟合系数a for n=1:151%提取拟合数据Hfit(n)=Hmax*(n-1)/150;Bfit(n)=a(1)*Hfit(n)^13+a(2)*Hfit(n)^12+a(3)*Hfit(n)^11+...a(4)*Hfit(n)^10+a(5)*Hfit(n)^9+a(6)*Hfit(n)^8+a(7)*Hfit(n)^7+...a(8)*Hfit(n)^6+a(9)*Hfit(n)^5+a(10)*Hfit(n)^4+a(11)*Hfit(n)^3+...a(12)*Hfit(n)^2+a(13)*Hfit(n)+a(14);endplot(Hdata,Bdata,'*')%对原数据描点绘图hold on%保持当前坐标轴和图形plot(Hfit,Bfit)%绘制多项式拟合曲线hold on%保持当前坐标轴和图形title('磁化曲线')%标题'磁化曲线'xlabel('{\itH}[A/cm]')%x坐标标签“H[A/cm]”ylabel('{\itB}[T]')%y坐标标签“B[T]”【仿真实例0-4】解:用M语言编写绘制磁化曲线的MATLAB程序如下:%绘制磁化曲线问题clcclearHdata=[43,49,55,61,67,72.5,78,84,90,100,110,...123,137,155,173,192,210,240,300,395,...520,643,800,920,1100,1300,1800];%磁场强度H值Bdata=0.2:0.05:1.50;%磁感应强度B值ydata=0:0.001:1.6;%y坐标0~1.6xdata=interp1(Bdata,Hdata,ydata,'spline');%采用样条插值的方法分析数据plot(Hdata,Bdata,'*');%用'*'描点绘制磁化曲线hold on%保持当前坐标轴和图形plot(xdata,ydata);%绘制x,y坐标hold on%保持当前坐标轴和图形title('磁化曲线')%标题'磁化曲线'xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'ylim([0,1.80])%y坐标标注0~1.8【仿真实例0-5】解:用M语言编写绘制磁滞回线的MATLAB程序如下:%绘制磁滞回线问题clcclearBdata=[0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,...-0.9,-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0];%磁感应强度基本数据Hdata=[48,52,58,73,85,103,135,193,80,42,2,-18,...-29,-40,-45,-48,-52,-58,-73,-85,-103,-135,...-193,-80,-42,-2,18,29,40,45,48];%磁场强度基本数据plot(Hdata,Bdata)%绘制磁滞回线hold on%保持当前坐标轴和图形title('磁滞回线')%标题'磁滞回线'plot([-250,250],[0,0],'r-')%绘制红色x轴坐标线hold on%保持当前坐标轴和图形plot([0,0],[-1.5,1.5],'r-')%绘制红色y轴坐标线xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'grid on%显示网格【仿真实例0-6】解:用M语言编写绘制基于【仿真实例0-5】磁滞回线的平均曲线的MATLAB程序如下:%绘制磁滞回线的平均曲线问题clcclearBdata=[-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,...0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,-0.9,-1.0];%磁感应强度基本数据Hdata=[-193,-80,-42,-2,18,29,40,45,48,52,58,73,85,...103,135,193,80,42,2,-18,-29,-40,-45,...-48,-52,-58,-73,-85,-103,-135,-193];%磁场强度基本数据plot(Hdata,Bdata,'linewidth',1.5)%绘制磁滞回线hold on%保持当前坐标轴和图形Bdata1=[-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.7,0.8,0.9,1.0];Hdata1=[-193,-80,-42,-2,18,29,40,45,48,52,58,73,85,103,135,193];Bdata2=[-1.0,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.7,0.8,0.9,0.95,1.0];Hdata2=[-193,-135,-103,-85,-73,-58,-52,-48,-45,-40,-29,-18,2,42,80,193];%将数据分两组If=-1.0:.05:1.0;%重新设置磁感应强度参数Ean1=spline(Bdata1,Hdata1,If);Ean2=spline(Bdata2,Hdata2,If);%根据两组数据求If对应的样条差值plot((Ean1+Ean2)/2,If,':','linewidth',1.5)%绘制平均值曲线hold on%保持当前坐标轴和图形title('磁滞回线的平均曲线')%标题'磁滞回线的平均曲线'plot([-250,250],[0,0],'r-')%绘制红色x轴坐标线hold on%保持当前坐标轴和图形plot([0,0],[-1.5,1.5],'r-')%绘制红色y轴坐标线xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'grid on%显示网格【仿真实例1-1】解:用M语言编写绘制基本磁化曲线和磁路未饱和的磁化电流曲线的MATLAB程序如下:clcclearBdata=[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,1.1,...%磁通密度基本数据1.2,1.3,1.34,1.38,1.41,1.43,1.45,1.47,...1.48,1.49,1.495,1.5,1.55,1.6];Hdata=[5,10,20,25,40,50,60,70,90,110,150,...%磁场强度基本数据200,300,400,500,600,700,800,900,...1000,1100,1200,1700,5000,10000];B=[-Bdata,0,Bdata];%将磁通密度数据扩展为正负值H=[-Hdata,0,Hdata];%将磁场强度数据扩展为正负值B=sort(B);%对磁通密度数据进行排序H=sort(H);%对磁场强度数据进行排序subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=0:0.01:2*pi;%正弦函数自变量从0~2π,间隔0.01 Bsin=1.1*sin(Bx);%计算正弦磁通密度值,幅值为1.1 plot(Bx,Bsin);%绘制磁通密度正弦曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标范围为0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on%保持图形plot(H,B,'ro');%用红色'o'绘制原始数据点grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'mymodel=fittype('a*sinh(b*x)');%选择sinh为拟合模型opts=fitoptions(mymodel);%初始化设置set(opts,'Robust','LAR','Normalize','Off');%设置使用线性最小二乘法拟合Fit=fit(B',H',mymodel,opts);%拟合bt=B;%拟合曲线临时磁通密度数据ht=Fit.a.*sinh(Fit.b.*bt);%拟合曲线临时磁场强度数据plot(ht,bt);%在原始数据窗口绘制拟合曲线subplot(2,2,4);%将窗口划分2行2列使用第4子窗口hold on;%保持图形MX=1.6;%磁通密度最大值BI1=sin((-MX:0.01:MX)./MX.*pi).*MX;%磁通正弦变化HI1=Fit.a.*Fit.b.*BI1;%拟合曲线映射后的磁场强度XI1=1:length(BI1);%初始化x轴刻度XI1=XI1/length(BI1)*2*pi;%折算到0~2πplot(XI1,HI1);%绘制磁化电流曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标显示范围xlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例1-2】解:用M语言编写绘制基本磁化曲线和磁路未饱和的磁化电流曲线的MATLAB程序如下:clcclearBdata=[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,1.1,...%磁通密度基本数据1.2,1.3,1.34,1.38,1.41,1.43,1.45,1.47,...1.48,1.49,1.495,1.5,1.55,1.6];Hdata=[5,10,20,25,40,50,60,70,90,110,150,...%磁场强度基本数据200,300,400,500,600,700,800,900,...1000,1100,1200,1700,5000,10000];B=[-Bdata,0,Bdata];%将磁通密度数据扩展为正负值H=[-Hdata,0,Hdata];%将磁场强度数据扩展为正负值B=sort(B);%对磁通密度数据进行排序H=sort(H);%对磁场强度数据进行排序subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=0:0.01:2*pi;%正弦函数自变量从0~2π,间隔0.01 Bsin=1.5*sin(Bx);%计算正弦磁通密度值,幅值为1.5 plot(Bx,Bsin);%绘制磁通密度正弦曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标范围为0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on%保持图形plot(H,B,'ro');%用红色'o'绘制原始数据点grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)' mymodel=fittype('a*sinh(b*x)');%选择sinh为拟合模型opts=fitoptions(mymodel);%初始化设置set(opts,'Robust','LAR','Normalize','Off');%设置使用线性最小二乘法拟合Fit=fit(B',H',mymodel,opts);%拟合bt=B;%拟合曲线临时磁通密度数据ht=Fit.a.*sinh(Fit.b.*bt);%拟合曲线临时磁场强度数据plot(ht,bt);%在原始数据窗口绘制拟合曲线subplot(2,2,4);%将窗口划分2行2列使用第4子窗口hold on;%保持图形MX=1.6;%磁通密度最大值BI1=sin((-MX:0.01:MX)./MX.*pi).*MX;%磁通正弦变化HI1=Fit.a.*sinh(Fit.b.*BI1);%拟合曲线映射后的磁场强度XI1=1:length(BI1);%初始化x轴刻度XI1=XI1/length(BI1)*2*pi;%折算到0~2πplot(XI1,HI1);%绘制磁化电流曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标显示范围xlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例1-3】解:用M语言编写绘制磁滞回线的MATLAB程序如下:clcclearBdata=[0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,...-0.9,-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0];%输入磁感应强度基本数据Hdata=[0.24,0.26,0.29,0.365,0.425,0.515,0.675,...0.965,0.4,0.21,0.01,-0.09,-0.145,-0.2,...-0.225,-0.24,-0.26,-0.29,-0.365,-0.425,...-0.515,-0.675,-0.965,-0.4,-0.21,-0.01,...0.09,0.145,0.2,0.225,0.24];%输入磁场强度基本数据MX=1.39;%磁通密度最大值H=Hdata;B=Bdata;%磁滞回线数据H=H.*10;B=B.*MX;%调整B和H的显示比例subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=-pi/2:0.01:3*pi/2;%磁通密度数据范围-π/2~3π/2Bsin=1.5*sin(Bx);%计算正弦值扩大1.5倍以适应磁滞回线plot(Bx,Bsin);%绘制磁通密度正弦曲线hold on;%保持图形plot([-pi/23*pi/2],[00],'r-')%用红色实线绘制磁密曲线的x坐标轴plot([00],[-22],'r-')%用红色实线绘制磁密曲线的y坐标轴grid on;%显示网格线xlim([-pi/2,3*pi/2]);%限定横坐标显示范围-π/2~3π/2 xlabel('角度{\it\omegat}/rad');%在横坐标上标注'ωt'ylabel('磁通密度{\itB}/(T)');%在纵坐标上标注'磁通密度B/(T)' subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on;%保持图形plot(H,B,'ro');%用红色'o'绘制磁滞回线B1=B(1:8);H1=H(1:8);%第1象限数据B>0数据B2=B(8:15);H2=H(8:15);%第2象限数据B>0数据B3=B(16:23);H3=H(16:23);%第3象限数据B>0数据B4=B(23:30);H4=H(23:30);%第4象限数据B>0数据BB1=[B4,B1];HH1=[H4,H1];%磁滞回线的下分支XI1=-10:0.1:10;%设置横坐标值YI1=interp1(HH1,BB1,XI1,'spline');%用3次样条插值计算plot(XI1,YI1);%绘制插值后磁滞回线下分支BB2=[B2,B3];HH2=[H2,H3];%磁滞回线的上分支XI2=-10:0.1:10;%设置横坐标值YI2=interp1(HH2,BB2,XI2,'spline');%用3次样条插值计算plot(XI2,YI2);%绘制插值后磁滞回线上分支grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}/(T)');%在纵坐标上标注'磁通密度B/(T)'xlim([-1515])%设置横坐标范围subplot(2,2,4);%将窗口划分2行2列使用第4子窗口XI1=sin((0:0.01:MX)./MX.*pi./2).*MX;%磁通密度正弦变化(0~π/2)YI1=interp1(B1,H1,XI1,'spline');%用3次样条插值计算lengthX=length(XI1)-1;%计算先前波形的横坐标长度X1=(0:lengthX);%设置横坐标范围(0~π/2)X1=X1/lengthX*pi./2;plot(X1,YI1);%绘制0~π/2上的曲线hold on;%保持图形XI2=sin((MX:0.01:2*MX)./MX.*pi./2).*MX;%磁通密度正弦变化(π/2~π)YI2=interp1(B(8:16),H(8:16),XI2,'spline');%用3次样条插值计算lengthX=length(XI2)-1;%计算先前波形的横坐标长度X2=(lengthX:2*lengthX);%设置横坐标范围(π/2~π)X2=X2/lengthX*pi./2;plot(X2,YI2);%绘制π/2~π上的曲线XI3=sin((MX:0.01:1.5*MX)./MX.*pi).*MX;%磁通密度正弦变化(π~3π/2)YI3=interp1(B3,H3,XI3,'spline');%用3次样条插值计算lengthX=length(XI3)-1;%计算先前波形的横坐标长度X3=(2*lengthX:3*lengthX);%设置横坐标范围(π~3π/2)X3=X3/lengthX*pi./2;plot(X3,YI3);%绘制π~3π/2上的曲线XI4=sin((1.5*MX:0.01:2*MX)./MX.*pi).*MX;%磁通密度正弦变化(3π/2~2π)YI4=interp1(B4,H4,XI4,'spline');%用3次样条插值计算lengthX=length(XI4)-1;%计算先前波形的横坐标长度X4=(3*lengthX:4*lengthX);%设置横坐标范围(3π/2~2π)X4=X4/lengthX*pi./2;plot(X4,YI4);%绘制3π/2~2π上的曲线grid on;%显示网格线plot([0,2*pi],[00],'r-')%用红色实线绘制磁化电流曲线的x坐标轴xlim([0,2*pi]);%限定横坐标显示范围0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'ωt'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例2-1】解:用M语言编写绘制【例2-1】功角特性曲线的MATLAB程序如下:clcclearU1=6000/sqrt(3);%定子相电压I1=57.8;%定子相电流xd=64.2;%直轴电抗xq=40.8;%交轴电抗cosfain=0.8;%cosϕN=0.8fain=acos(cosfain);%求ϕNsinfain=sin(fain);%求sinϕNpsi=atan((U1*sinfain+xq)/(U1*cosfain));%求内功率因数角ψId=I1*sin(psi)*exp(1i*pi/2-psi);%计算直轴电流分量Iq=I1*cos(psi)*exp(-psi);%计算交轴电流分量E0=abs(U1*exp(-1i*fain)-1i*Id*xd-1i*Iq*xq);%计算励磁电动势th=0:0.01:pi;%x坐标轴0~π变化x=th./pi.*180;%换算成角度Pem1=3*U1*E0/xd.*sin(th);%求基本电磁功率Pem2=1.5*U1^2*(1/xq-1/xd).*sin(2.*th);%求附加电磁功率Pem=Pem1+Pem2;%凸极电磁功率hold on;%保持当前坐标轴和图形plot(x,Pem1,'b-',x,Pem2,'b-',x,Pem,'b-')%绘制各功角特性plot([0180],[00],'r-')%用红色实现绘制x坐标轴plot([9090],[-2e510e5],'r--')%用红色虚线绘制90°对应值text(50,9e5,'Pem')%在相应位置标注“Pem”text(130,7e5,'Pem1')%在相应位置标注“Pem1”text(70,1.5e5,'Pem2')%在相应位置标注“Pem2”xlabel('Angle[°]');%横坐标标注“Angle[°]”ylabel('Power[kW]');%纵坐标标注“Power[kW]”title('三相凸极同步电动机功角特性');%标题“三相凸极同步电动机功角特性”【仿真实例2-2】解:用M语言编写绘制【例2-2】矩角特性曲线的MATLAB程序如下:clcclearU1=3464;%定子相电压E0=6378;%励磁电动势xc=64;%同步电抗n1=1000;%同步转速th=0:.01:pi;%x坐标轴0~π变化x=th./pi.*180;%换算成角度T=90*U1*E0/(xc*pi*n1).*sin(th);%求电磁转矩plot(x,T)%绘制矩角特性xlabel('Angle[°]');%横坐标标注“Angle[°]”ylabel('Torque[N\cdotm]');%纵坐标标注“Torque[N ·m]”title('三相隐极同步电动机矩角特性');%标题“三相隐极同步电动机矩角特性”【仿真实例3-1】解:根据例题3-1的解得该电动机固有机械特性方程为1230123061972.ss ..s s s s T T mm m +=+=编制绘制该电动机固有机械特性的M 文件程序如下:clc clear n1=1500;%输入同步转速s=0:0.005:1;%转差率变化范围0~1,间隔0.005T=197.6./(0.123./s+s./0.123);%计算电磁转矩Subplot(1,2,1)%按照1行2列绘制子图1plot(s,T,'k-');%绘制机械特性xlabel('转差率{\its}');%横坐标标注“转差率s ”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T /(N·m)”title('异步电动机固有机械特性{\itT}={\itf}({\its})')%标注标题“T =f (s )”n=n1.*(1-s);%计算转速Subplot(1,2,2)%按照1行2列绘制子图2plot(T,n,'k-');%绘制机械特性xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T /(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n /(rpm)”title('异步电动机固有机械特性{\itn}={\itf}({\itT})')%标注标题“n =f (T )”hold on;%保持当前坐标轴和图形【仿真实例3-2】解:用M 语言编写绘制【例3-2】人为机械特性曲线的MATLAB 程序如下:clc clear m1=3;%异步电动机相数U1=220;%定子相电压n1=1000;%输入同步转速p=2;%极对数f1=50;%电源频率r1=2.08;%定子绕组电阻r2=1.53;%转子绕组电阻折算值w1=2*pi*f1/p;%计算同步角速度,单位:rad/sx1=3.12;%定子漏电抗x2=4.25;%转子漏电抗折算值s=0:0.005:1;%设定转差率变化范围:0~1,间隔0.005n=n1.*(1-s);%计算转速T=(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,1)%按2行2列绘制子图plot(s,T,'k');%绘制固有机械特性曲线xlabel('转差率{\its}');%横坐标标注“转差率s”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T/(N·m)”str_x=0.25;%标注字符的横坐标text(str_x,max(T),strcat('U1=',num2str(int16(U1)),'V'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电压值title('降低定子电压的人为机械特性')%标题“降低定子电压的人为机械特性”hold on;%保持当前坐标轴和图形subplot(2,2,2)%按2行2列绘制子图2plot(T,n,'k');%绘制固有机械特性曲线hold on;xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T/(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n/(rpm)”text(max(T)-20,500,strcat('U1=',num2str(int16(U1)),'V'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电压值title('降低定子电压的人为机械特性')%标题“降低定子电压的人为机械特性”str_y=500;%设定字符串的纵坐标初值for coef=0.75:-0.25:0.25;%设定降低定子电压的范围U1p=U1*coef;%降低定子电压T1=(m1*p*U1p^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,1)%按2行2列绘制子图1plot(s,T1,'k-');%绘制降低定子电压人为机械特性str=strcat('U1=',num2str(int16(U1p)),'V');%创建标注字符串text(str_x,max(T1)+5,str,'FontSize',9,'Color','black');%标记各曲线的电压值subplot(2,2,2)%按2行2列绘制子图2plot(T1,n,'k-');%绘制降低定子电压人为机械特性str=strcat('U1=',num2str(int16(U1p)),'V');%创建标注字符串str_y=str_y+100;%修改字符串的纵坐标值text(max(T1)-5,str_y,str,'FontSize',9,'Color','black');%标记各曲线的电压值endsubplot(2,2,3)%按2行2列绘制子图3plot(s,T,'k-');%绘制固有机械特性曲线xlabel('转差率{\its}');%横坐标标注“转差率s”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T/(N·m)”str_x=0.75;%标注字符的横坐标text(str_x,max(T)-45,strcat('r2=',num2str(r2),'\Omega'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电阻值title('改变转子电阻的人为机械特性')%标题“改变转子电阻的人为机械特性”hold on;%保持当前坐标轴和图形subplot(2,2,4)%按2行2列绘制子图4plot(T,n,'k-');%绘制固有机械特性曲线hold on;xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T/(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n/(rpm)”text(50,400,strcat('r2=',num2str(r2),'\Omega'),'FontSize',9,'Color','black');%标注固有机械特性曲线的电阻值title('改变转子电阻的人为机械特性')%标题“改变转子电阻的人为机械特性”r2p=r2;%设定改变的转子电阻的初值str_y1=400;%设定字符串的纵坐标初值for coef=1:4;%设定改变转子电阻的范围r2p=r2p+0.75;%改变转子电阻T1=(m1*p*U1^2*r2p)./s./(w1.*((r1+r2p./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,3)%按2行2列绘制子图3plot(s,T1,'k-');%绘制改变转子电阻人为机械特性str=strcat('r2=',num2str(r2p),'\Omega');%创建标注字符串str_y=T1(length(T1))-5;%标注字符串的纵坐标值text(str_x,str_y+11,str,'FontSize',9,'Color','black');%标记各曲线的电阻值subplot(2,2,4)%按2行2列绘制子图4plot(T1,n,'k-');%绘制改变转子电阻人为机械特性str=strcat('r2=',num2str(r2p),'\Omega');%创建标注字符串str_y1=str_y1-90;%修改字符串的纵坐标值text(50+coef*8,str_y1,str,'FontSize',9,'Color','black');%标记各曲线的电阻值end【仿真实例4-1】解:用M语言编写绘制直流发电机空载特性曲线的MATLAB程序如下:%绘制直流发电机空载特性曲线问题clcclearIfdata1=[0.0,0.5,0.7,0.8,1.0,1.2,1.5];Ifdata2=[0.0,0.5,0.7,0.8,1.0,1.2,1.5];%励磁电流I f值U0data1=[2,75,93.5,99,106,111.5,117];U0data2=[18,83.6,97.5,102.5,109.5,114,117];%空载电压U0值xdata=0:.1:1.5;%y坐标0~120ydata1=interp1(Ifdata1,U0data1,xdata,'spline');ydata2=interp1(Ifdata2,U0data2,xdata,'spline');%采用样条插值的方法分析数据plot(Ifdata1,U0data1,'*')%用'*'描点绘制空载特性hold on;%保持当前坐标轴和图形plot(Ifdata2,U0data2,'*')%绘制I f,U0坐标hold on;plot(xdata,ydata1);%绘制x,y坐标hold on;%保持当前坐标轴和图形plot(xdata,ydata2);%绘制x,y坐标hold on;%保持当前坐标轴和图形title('直流发电机空载特性')%标题'直流发电机空载特性' xlabel('{\itI}_f(A)')%x坐标标签'I f(A)'ylabel('{\itU}_0(V)')%y坐标标签'U0(V)'axis([0,2,0,120])【仿真实例4-2】解:用M语言编写绘制他励直流发电机外特性曲线的MATLAB程序如下:%绘制他励直流发电机外特性曲线问题clcclearIdata=[0,4.3,7,8.8,13,15,17];%负载电流I值Udata=[118,116,114,112.5,110,108.5,107];%负载电压U值xdata=0:1:17;%x坐标0~17ydata=interp1(Idata,Udata,xdata,'spline');%采用样条插值的方法分析数据plot(Idata,Udata,'*');%用'*'描点绘制外特性hold on%保持当前坐标轴和图形plot(xdata,ydata);%绘制x,y坐标hold on%保持当前坐标轴和图形title('他励直流发电机外特性')%标题'他励直流发电机外特性' xlabel('{\itI}(A)')%x坐标标签'I(A)'ylabel('{\itU}(V)')%y坐标标签'U(V)'axis([0,20,0,150])%设置轴线数据范围【仿真实例4-3】解:用M语言编写绘制并励直流发电机外特性曲线的MATLAB程序如下:%绘制并励直流发电机外特性曲线问题clcclearnN=1500;IfN=1.4;Rf=75;Ra=2.3;%输入发电机基本数据Ifdata=[0,0.5,0.7,0.8,1.0,1.2,1.5];%输入励磁电流U0data=[5,75,95,100,108,110,117];%输入空载电压If=0:0.01:12;%重新设置励磁参数P=polyfit(Ifdata,U0data,3);U0=polyval(P,If);%空载特性曲线拟合U=If*Rf;%计算电枢端电压Ia=(U0-U)/Ra;%计算电枢电流I=Ia-If;%计算负载电流plot(I,U)%绘制并励直流发电机外特性hold on%保持当前坐标轴和图形title('并励直流发电机外特性')%标题'并励直流发电机外特性'axis([0,20,0,120])%设置轴线数据范围xlabel('{\itI}(A)')%x坐标标签'I(A)'ylabel('{\itU}(V)')%y坐标标签'U(V)'【仿真实例4-4】解:用M语言编写仿真并励直流发电机自励过程和求稳态电压的MATLAB程序如下:%仿真并励直流发电机自励过程和求稳态电压问题%sh_ge_se_ex_ode函数的M文件function dydt=sh_ge_se_ex_ode(~,iff)%定义该M—函数为sh_ge_se_ex_ode,即%shunt_generator_self_excited_odeglobal a1a2a3a4Rf%指定全局变量Lf=40;Rf=75;%输入发电机基本数据Ifdata=[0,0.5,0.7,0.8,1.0,1.2,1.5];%输入励磁电流实验数据U0data=[5,75,95,100,108,110,117];%输入感应电动势数据a=polyfit(Ifdata,U0data,3);%曲线拟合dydt=1/Lf*(a(1)*iff^3+a(2)*iff^2+a(3)*iff^1+a(4))-Rf/Lf*iff;%列写标准形式微分方程并将感应电动势用%励磁电流的拟合多项式函数表示a1=a(1);a2=a(2);a3=a(3);a4=a(4);%给全局变量赋值%脚本M文件[t,iff]=ode23(@sh_ge_se_ex_ode,[010],[0]);%选择微分方程解算指令ode23()global a1a2a3a4Rf%指定全局变量subplot(3,1,1),%定义绘制仿真曲线1ea=a1*iff.^3+a2*iff.^2+a3*iff.^1+a4;%求感应电动势plot(iff,ea)%绘制e a=f(I f)曲线hold on%保持当前坐标轴和图形uf=Rf.*iff;%计算u fplot(iff,uf,'g')%用绿颜色绘制u f=f(i f)场阻线title('并励直流发电机自励过程')%标题'并励直流发电机自励过程'xlabel('{\itI}_f(A)')%曲线1x坐标标签'I f(A)'ylabel('{\itE}_a/{\itU}_f(V)')%曲线1y坐标标签'E a/U f(V)'axis([0,1.6,0,150])%设置x、y坐标值subplot(3,1,2)%定义绘制曲线2plot(t,iff);%绘制曲线2即i f=f(t)xlabel('{\itt}(s)')%曲线2x坐标标签't(s)'ylabel('{\itI}_f(A)')%曲线2y坐标标签'I f(A)'axis([0,5,0,2])subplot(3,1,3),%定义绘制曲线3plot(t,(a1*iff.^3+a2*iff.^2+a3*iff.^1+a4));%绘制e a曲线xlabel('{\itt}(s)')%曲线3x坐标标签't(s)'ylabel('{\ite}_a(V)')%曲线3y坐标标签'e a(V)'iff,a1*iff.^3+a2*iff.^2+a3*iff.^1+a4;%计算励磁电流和感应电动势的数值axis([0,5,0,150])【仿真实例4-5】解:用M语言编写绘制他励直流电动机工作特性的MATLAB程序如下:%绘制他励直流电动机工作特性问题clcclearUN=220;PN=22;IaN=115;Nn=1500;%输入电动机参数Ra=0.21;%输入电枢电阻CePhiN=(UN-Ra*IaN)/Nn;%计算电动势常数C eΦNCTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNIa=0:IaN;%电枢电流从0~额定电流I aNn=UN/CePhiN-Ra/(CePhiN)*Ia;%计算转速TN=CTPhiN*Ia;%计算电磁转矩TNP=TN*10;%为清楚起见,将电磁转矩扩大十倍显示plot(Ia,n,'b.-',Ia,TNP,'r.-');%绘制转速特性和转矩特性曲线xlabel('电枢电流{\itI}_a/A')%横坐标标签'电枢电流I a/A'ylabel('转速{\itn}/rpm,电磁转矩{\itT}/N.m')%纵坐标'转速n/rpm,电磁转矩T/N.m' text(30,1500,'转速{\itn}');%标记转速曲线text(50,500,'电磁转矩{\itT}(X10)');%标记转矩曲线【仿真实例4-6】解:用M语言编写绘制串励直流电动机工作特性的MATLAB程序如下:%绘制串励直流电动机工作特性问题clcclearUN=220;PN=22;IaN=115;Nn=1500;%输入电动机参数Ra=0.18;%输入电枢电阻Rf=0.31;%输入励磁电阻k=0.01;%输入比例常数CePhiN=(UN-(Ra+Rf)*IaN)/Nn;%计算电动势常数C eΦNCe=CePhiN/k/IaN;%计算电动势常数C eIa=0:IaN;%电枢电流从0~额定电流I aNn=UN./(Ce*k.*Ia)-(Ra+Rf)/(Ce*k);%计算转速start_p=30;%设置显示的起始点Ia_p=Ia(start_p:length(Ia));%截取电流显示区间n_p=n(start_p:length(n));%截取转速显示区间CTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNCT=CTPhiN/k/IaN;%计算电磁转矩常数C TTN=CT*k*Ia.*Ia;%计算电磁转矩TNP=TN*30;%为清楚起见,将电磁转矩扩大三十倍显示plot(Ia_p,n_p,'b.-',Ia,TNP,'r.-');%绘制转速特性和转矩特性曲线xlabel('电枢电流{\itI}_a/A')%横坐标标签'电枢电流I a/A'ylabel('转速{\itn}/rpm,电磁转矩{\itT}/N.m')%纵坐标标签'转速n/rpm,电磁转矩T/N.m' text(40,5500,'转速\itn');%标记转速曲线text(15,1000,'电磁转矩{\itT}(X30)');%标记转矩曲线【仿真实例5-1】解:用M语言编写绘制他励直流电动机机械特性的MATLAB程序如下:clcclearPN=22,UN=220,IN=115,nN=1500,Ra=0.21;%输入铭牌数据IaN=IN;%计算电枢电流CePhiN=(UN-Ra*IaN)/nN;%计算电动势常数C eΦNCTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNIa=0:IaN;%建立电枢电流数组n=UN/CePhiN-Ra/(CePhiN)*Ia;%计算转速T=CTPhiN*Ia;%计算电磁转矩figure(1);%建立1号图形窗口plot(T,n,'.-');%绘制固有机械特性曲线title('固有机械特性');%标题'固有机械特性'xlabel('电磁转矩{\itT}/N\cdotm');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpm');%纵轴标注'转速n/rpm'ylim([0,1800]);%限制纵轴显示范围figure(2);%建立2号图形窗口plot(T,n,'rd');%绘制固有机械特性曲线title('降低电枢电源电压的人为机械特性');%标题'降低电枢电源电压的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形for jy=1:-0.25:0.25;U=UN*jy;%改变电枢电源电压n=U/CePhiN-Ra/(CePhiN*CTPhiN)*T;%计算对应不同电枢电源电压的转速plot(T,n,'-');%绘制改变电枢电源电压的人为机械特性str=strcat('{\it U}=',num2str(U),'V');%显示字符串处理y=1700*jy;%显示字符串纵坐标text(60,y,str);%给曲线标注电压值endfigure(3);%建立3号图形窗口Rc=0;%临时变量n=UN/CePhiN-(Ra+Rc)/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'rd');%绘制固有机械特性曲线title('电枢回路串电阻的人为机械特性');%标题'电枢回路串电阻的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形Rc=0.02;%电枢串电阻值for Rc=0:0.5:1.9;n=UN/CePhiN-(Ra+Rc)/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'-');%绘制电枢回路串电阻的人为机械特性str=strcat('{\it R}=',num2str(Ra+Rc),'\Omega');%字符串处理y=400*(4-Rc*1.8);%显示字符串的纵坐标text(120,y,str);%给各曲线标记电阻值endylim([0,1700]);%限制纵轴显示范围figure(4);%建立4号图形窗口n=UN/CePhiN-Ra/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'rd');%绘制固有机械特性曲线title('减弱磁通的人为机械特性');%标题'减弱磁通的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形for ct=0.5:0.25:1.3;CePhi=CePhiN*ct;CTPhi=CTPhiN*ct;%改变磁通值n=UN/CePhi-Ra/(CePhi*CTPhi)*T;%计算转速plot(T,n,'-');%绘制改变磁通时的人为机械特性str=strcat('{\it\phi}=',num2str(ct),'*\phi_N');%显示字符串处理y=3600-1850*ct;%显示字符串纵坐标text(120,y,str);%给各曲线标记磁通endylim([0,3600]);%限制纵坐标的显示范围。
电力拖动自动控制系统---Matlab仿真实验报告实验一二极管单相整流电路一.【实验目的】1.通过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.通过实验进一步加深理解二极管单向导通的特性。
图1-1 二极管单相整流电路仿真模型图二.【实验步骤和内容】1.仿真模型的建立①打开模型编辑窗口;②复制相关模块;③修改模块参数;④模块连接;2.仿真模型的运行①仿真过程的启动;②仿真参数的设置;3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2 整流电压输出波形图图1-3 整流电流输出波形图图1-4 整形电压、电流输出波形图实验二三相桥式半控整流电路一.【实验目的】1.通过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.研究三相桥式半控整流电路整流的工作原理和全过程。
二.【实验步骤和内容】1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:(1)交流电压源参数U=100 V,f=25 Hz,三相电源相位依次延迟120°。
(2)晶闸管参数 Rn=0.001 Ω,Lon=0.000 1 H,Vf=0 V,Rs=50 Ω,Cs=250e-6 F。
(3)负载参数R=10 Ω,L=0 H,C=inf。
(4)脉冲发生器的振幅为5 V,周期为0.04 s (即频率为25 Hz),脉冲宽度为2。
图2-1 三相桥式半控整流电路仿真模型图当α=0°时,设为0.003 3s,0.016 6s,0.029 9 s。
图2-2 α=0°整流输出电压等波形图当α=60°时,触发信号初相位依次设为0.01s,0.0233s,0.0366s。
MATLAB软件在《电机与拖动》课程任务驱动教学法中的应用《电机与拖动》课程是电机基础和电力拖动两门课程的综合,课程理论性强,涉及的基础理论偏多;与工程实际联系紧密,一直被公认为教师难教、学生难学的“两难”课程。
传统的教学方法,采用图片、幻灯片、视频等资料介绍电机的结构、工作原理、拖动制动方法等,这很难让学生掌握和理解,同时学时有限电机与拖动课程的实验学时已经寥寥无几,教师上课时也不能为学生一一演示。
任务驱动教学法是一种能够很好应用于以实验性、实践性与操作性较强的教学内容的教学方法,它的含义是以富有趣味性,能够激发学生学习动机与好奇心的情景为基础,与教学内容紧密结合的任务为载体,使学习者在完成特定任务的过程中获得知识与技能的一种教学方法[1,2]。
为了加深学生对理论知识的理解,提高学生的学习兴趣,将电机与拖动课程的一些内容设计为任务驱动教学模式中的任务,让学生自己主动学习电机工作原理并利用MATLAB软件搭建模型进行仿真,不仅有助于学生理解和掌握该课程的难点,使之不再感到抽象,而且能够调动学生的学习积极性,大大提高教学效果和质量[3-5]。
一、MATLAB介绍MATLAB是美国Math Works公司开发的一种科学与工程计算软件,具备丰富的矩阵运算、良好的人机交互、模块化的系统仿真及绘制图形曲线的功能,可以广泛应用于各个领域,受到广大工程设计人员的青睐。
在《电机与拖动》课程教学中,可以利用其Simulink工具箱中power system元件库及现有的算法程序,搭建不同的电机仿真模型,绘制各个变量曲线,使抽象的概念更加形象生动。
二、仿真任务实例――直流电机的起动任务描述:利用MATLAB软件搭建直流电机的直接起动模型,观察起动过程中直流电机转速、电枢电流、励磁电流和电磁转矩的变化过程。
学生在搭建仿真模型时,首先需要在simulink的power system元件库中找到直流电机的模型,如图1所示。
实验一转速反馈控制(单闭环)直流调速系统仿真一.实验目的1.研究直流电动机调速系统在转速反馈控制下的工作。
2.研究直流调速系统中速度调节器ASR的工作及其对系统响应特性的影响。
3.观察转速反馈直流调速系统在给定阶跃输入下的转速响应。
二、实验设备1.计算机;2.模拟实验装置系统;3.A/D & D/A 接口卡、扁平电缆(如下图所示)。
总线槽扁平电缆计算机A/D & D/A接口卡模拟实验装置系统三、实验原理直流电动机:额定电压UN220V ,额定电流IdN,55 A额定转速 n N1000r/ min,电动机电势系数 C e 0.192V min/ r 晶闸管整流装置输出电流可逆,装置的放大系数 K s =44,滞后时间常数 T s=0.00167s 。
电枢回路总电阻 R=1.0 Ω,电枢回路电磁时间常数 T1=0.00167s ,电力拖动系统机电时间常数 T m =0.075s 。
转速反馈系数α=0.01 V ·min/r。
对应额定转速时的给定电压 U n*10V图 1比例积分控制的直流调速系统的仿真框图四、实验内容1.仿真模型的建立进入 MATLAB,单击 MATLAB命令窗口工具栏中的SIMULINK图标,图2 SIMULINK 模块浏览器窗口(1)打开模型编辑窗口:通过单击 SIMULINK 工具栏中新模型的图标或选择 File →New→ Model 菜单项实现。
(2)复制相关模块:双击所需子模块库图标,则可打开它,以鼠标左键选中所需的子模块,拖入模型编辑窗口。
在本例中拖入模型编辑窗口的为:Source 组中的 Step 模块; Math Operations 组中的Sum模块和 Gain 模块; Continuous 组中的 Transfer Fcn模块和Integrator模块;Sinks 组中的Scope 模块;图 3模型编辑窗口(3)修改模块参数:双击模块图案,则出现关于该图案的对话框,通过修改对话框内容来设定模块的参数。
教育信息技术MATLAB 仿真技术在《电机与电力拖动》课堂教学中的应用夏华凤,许胜,付焕森(泰州学院,江苏 泰州 225300)摘 要:《电机与电力拖动》课程涉及电路、磁路和机械等知识,具有较强的实践性和工程性,学习该课程,对高等数学、物理和电路的要求较高。
文章将MATLAB 仿真技术应用到《电机与电力拖动》课堂教学中,让学生在讲课途中操作制作好的实验仿真模型,一方面验证了所讲内容,同时可以根据需要自行修改一些数据反复观察分析验证结果,加深学生对所学内容的认知与理解,充分调动学生学习的主观能动性,从而提高课堂教学质量。
关键词:电机与电力拖动;MATLAB 仿真;课堂教学;主观能动性Application of MATLAB Simulation Technology Used in Classroom Teaching for the Course of Electric Machinery & Electric Power DriveXIA Hua-feng,XU Sheng,FU Huan-sen(Taizhou University,Taizhou,Jiangsu,225300)Abstract:The course of electric machinery & electric power drive covers knowledge of electric curcuit, magnetic curcuit and machinery machine,etc. It has the characteristics of strong practicality and engineering. Learning this course calls high demanding of advanced mathematics, physics and electric curcuit. The MATLAB simulation technology is used in classroom teaching for this course of electric machinery & electric power drive in this paper. During the process of classroom teaching, students can verify the talking about contents on one hand by operating the produced experiment simulation models, meanwhile, they can modify some data if they want, and then observe, analyze and verify what’s going on. By doing so, students can deepen their acknowledge and understanding of what they learned, and their subjective initiative will be fully mobilized. All in all, the classroom teaching quality is improved.Key words:Electric machinery & electric power drive ;MATLAB simulation ;Classroom teaching ; Subjective initiative 《电机与电力拖动》课程涵盖了变压器、三相交流电动机、三相交流电动机的电力拖动、直流电机和直流电机的电力拖动等内容[1],系统阐述了电磁关系、稳态分析及运行特性等的基本概念、基本理论及一般问题的理论和计算推导[2]。