Ultra Wideband Planar Antennas for Wireless Communications
- 格式:pdf
- 大小:2.39 MB
- 文档页数:32
Recent Advances in Ultra Wideband Radar and Ranging SystemsInvited PaperRobert J. Fontana, Fellow, Lester A. Foster, Brian Fair and David WuMultispectral Solutions, Inc.Germantown, MD USA2007 IEEE International Conference on Ultra-Wideband (ICUWB), Singapore24-26 September 2007© 2007 IEEE. Personal use of this material is permitted. However,permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale orredistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.Recent Advances in Ultra Wideband Radar and Ranging SystemsInvited PaperRobert J. Fontana, Fellow, Lester A. Foster, Brian Fair and David WuMultispectral Solutions, Inc., Germantown, MD USAAbstract – This invited paper describes recent advances in short pulse electromagnetics as applied to Ultra Wideband (UWB) radar and precision ranging. UWB sensors designed for perimeter intrusion detection, obstacle and collision avoidance and industrial safety applications will be described. The design of a Part 15 compliant, UWB radar development kit is also discussed.Index Terms – Ultra wideband, Radar, Spread spectrum radar, Electromagnetic measurementsI. I NTRODUCTION The application of short pulse electromagnetics (UWB) to radar systems has a long history of development [1-3]. This invited paper discusses several recent UWB radar and (cooperative) ranging systems developed for various Government and commercial applications. In addition to exploiting the inherent advantages of short pulse radar for precision distance measurements, these unique sensors are seen to leverage UWB’s advantages in energy efficiency (e.g., unattended, battery-operated sensors) and reliable operation in multipath and clutter.II. UWB P ERIMETER I NTRUSION D ETECTION R ADARDeveloped for the U.S. Government, this radar sensor provides an extremely low power, perimeter detection and target identification capability. The radar utilizes UWB technology for superb clutter rejection as well as for extended-life battery operation. Operationally, the intrusion detection radar is used to monitor the traffic of vehicles and personnel in remote locations by acting as a cueing device for an infrared (IR) video imaging sensor (see Figure 1below).Fig. 2. UWB Radar shown in Field Deployment.(Radar is black unit to the right of rectangular control/battery unit)The radar detects an intrusion with a single sample of the environment while consuming less than 6 milliJoules of battery energy per sampling event. The radar sensor operates off of two standard AA batteries. Utilizing this low power UWB sensor as a trigger device for the much higher power consumption video camera system provides two major advantages, namely a significant reduction in the amount of video imagery to be post-processed and extended life, unattended operation on moderate capacity batteries. The field-of-views (FOVs) for both radar and IR camera werematched and sensor data relayed wirelessly from the unitonly if the image met certain detection criteria. In this fashion, the communications network and end user are not overwhelmed with a large volume of raw sensor data.The intrusion system radar hardware is illustrated in Figure 2, where the UWB receiver/processor and transmitter circuit cards are mounted behind a dual patch antenna array. The radar electronics package is mounted in an all-weather chassis for field deployment.Fig. 2. UWB Perimeter Intrusion Detection Sensor Hardware.A system block diagram of the UWB radar sensor is shown in Figure 3.Fig. 3. Block Diagram of the Perimeter Intrusion Detection Radar.Radar operational hardware consists of three major system components:(a) Antenna module consisting of a pair of 15 dBi gain antennas (transmit and receive), each with a 16 x 45 degree field of view;(b) C-Band receiver/signal processing module; and,(c) C-band UWB transmitter module.The antenna module consists of two C-band antenna arrays, one for transmit and the second for receive. The system’s operational (-3dB) frequency range is 6.0 to 6.4 GHz, with a -10dB bandwidth in excess of 1.25 GHz. Each array consists of an 8-element (4 x 2), wideband microstrip patch configuration to achieve the desired gain and directivity (i.e., to match that of the IR sensor optics). The antennas are spatially configured so as to provide low cross-coupling between receive/transmit array elements preventing blinding of the radar’s near field range gates by the transmitter pulse.All radar signal processing functions are performed in hardware within a single generic Field Programmable Gate Array (FPGA). After detection, the return signal from each transmit pulse is processed simultaneously within each of 512 range gate intervals [4]. In this fashion, multiple targets at varying ranges can be detected and processed with a minimal expenditure of both transmitter and signal processor energy. Returns from each range gate are digitized and, afterN successive pulse transmissions, the highest quantization level that is exceeded at least M times (M<N) is assigned to the corresponding range gate. This 512-length vector is compared, element by element, to a clutter map which is stored in memory and initialized upon system start up to the zero vector [0,0,…,0]. If any element of the received vector exceeds, by some predetermined threshold, the corresponding range gate entry in the clutter map, a detection event is declared for that specific range gate. The clutter mapis then updated using an autoregressive moving average of the previous clutter map contents and the current receive vector.In order to minimize radar power consumption, the radar electronics are placed in a low standby current, sleep mode until wakened by a watchdog timer to perform a periodic sampling of the environment. The clutter map is stored in non-volatile memory and reloaded upon subsequent power-up. As a person, vehicle or other object moves into the radar’s field of view, target presence is readily discerned from the comparison with the most recent clutter map information. If the target stops moving, it can be seen that its return will gradually disappear as it melts into the new clutter map. However, any subsequent motion creates a significant change in one or more range bins, creating a strong detection event. In operation, the system has demonstrated a sensitivity to detect a minivan in excess of 600 feet, a standing human target in excess of 450 feet and a crawling subject in excess of 300 feet. Each detection event consumes only 6 milliJoules of receiver/processor energy – only 3.5 nanoJoules of which is attributable to the transmitted pulse energy. Table 1 summarizes the physical and performance characteristics of the UWB Perimeter Intrusion DetectionRadar.Table 1. UWB Perimeter Intrusion Radar CharacteristicsRF Characteristics Center Frequency 6.20 GHzBandwidth 400 MHz (-3dB)1250 MHz (-10 dB)Peak Power +31 dBmAntenna Gain 15.0 dBiAntenna FOV 45 x 16 degreesSystem Performance Primary Power 1.0 W (7-33VDC)Detection Range Offset + 512 feet(Offset 0/100 feet)Range Resolution 1 footPRFSelectableto330 HzInterface RS232 115.2 kb/sPhysicalCharacteristicsCircuit Card Stack 2.25 x 3.5 x 1.38inches with shieldDual Patch Antenna 5.25 x 6.30 x 0.17inchesCircuit Card Weight 90 gramsAntenna Weight 160 gramsDemonstrated DetectorSensitivityHuman, Standing (6’tall)450 feetHuman, Crawling 300 feetMinivan In excess of 600 feetIII. O BSTACLE A VOIDANCE R ADARDeveloped under contract to the U.S. Army to provide anobstacle detection capability for unmanned aerial vehicles (UAVs), the UWB Obstacle Avoidance Radar (OAR) is animproved version of the previously described PerimeterIntrusion Detection radar. The unit is illustrated in Figure 4below.Figure 4. OAR UWB RadarAntenna Module & Digital ProcessorOAR utilizes a higher gain (17.5 dBi) C-band patch arrayand a higher peak power (+37 dBm) UWB transmitter. Theminimum detectable signal (MDS) to the receiver/processorwas also reduced by improving the system front end noisefigure (low NF pHEMPT device) and reducing widebanddetector noise pickup from the radar’s digital electronics.These improvements resulted in an overall 10 dB gain inweak signal performance over the Intrusion Detection Radardesign. With its greater sensitivity, OAR was able to detectoverhead power lines, major problems for both manned (e.g., Medivac helicopters) and UAV flight, at ranges in excess of 300 feet.An interesting experiment was performed with the radar, using it to capture the return from a Mallard duck flying low (6 feet) above the water surface. The return from the Mallard is shown in Figure 5, where detection is illustrated at a range of approximately 260 feet as the duck flew toward the radar. As seen, the detector output voltage is approximately 12 dB above the system noise floor. For reference, the radar cross section (RCS) of a duck is approximately -20 dB square meters (dBsm).12-102004006008001000Range (feet)D e t e c t o r V o l t a g e O u tFigure 5. Screen capture of a mallard duck in flight using OARIn this experiment, the duck was flying near the water surface which introduced an interesting multipath interference effect with the received signal. Figure 6 shows the four different possible signal paths from a UWB radar toa target. Note that, upon reflecting off the water surface, the signal changes polarity as a function of the incidence angle. For low grazing angles with a vertically polarized signal, thepolarity shifts nearly 180 degrees upon reflection. These returns combine at the radar antenna.4) Bounced path both waysFigure 6. Ray Tracing of Radar Multipath from TargetIn the above example, the radar antenna was approximately six feet above the lake surface, approximately the same height as that of the flying duck. The difference in path length between the multipath return and the direct path was thus approximately 8.4 cm, with the UWB pulse lengthapproximately 75 cm. Mathematically combining the UWBpulse returns with the time delays and phase shifts produced by the path geometries, one obtains the result in Figure 7. Here, multipath gain/loss is plotted as a function of range to target. For this analysis, the lake surface was assumed to have perfect conductivity so that each ray added equally.Fig. 7. Multipath Gain/Loss for 2m Antenna/Target HeightsAs observed in Figure 7, multipath can provide both destructive and constructive interference effects. At a range of 260 feet (80m), for example, there is approximately 6 dB of destructive interference. This interference was observed on the scope as the duck flew toward the radar, with the signal magnitude fluctuating wildly during the entireapproaching sequence. An additional source of fluctuations(unmodeled) resulted from the waves on the water surface that further scattered the multipath returns. Table 2 shows the approximate RCS at 6 GHz for various surface components of a small, 1 meter length, 3 meter wingspan, air vehicle. These values do not consider the contribution of theUAV engine or other electronic components. Manned aircraft, on the other hand, have radar cross sections that are significantly higher. For example, a typical (non-stealthy)aircraft that can fly at flight speeds of 250 knots will have a radar cross section approaching 10 to 20 dBsm. Table 3provides the estimated detection range for OAR as a function of RCS.Table 2. Estimated RCS of Small UAV at 6 GHzRadar Cross SectionUAV ComponentAspect ----at 6 GHzBodyNose / Tail WingsBroadside Nose / Tail Nose / Tail Nose / Tail BroadsidePropeller-12510726dBsm dBsm dBsm dBsm dBsmTable 3. OAR Detection Range vs. RCSRCS (dBsm) Detection Range (ft)-20 500 -10 890 0 1580 10 2820 20 5020IV. RADEKL – A N FCC-COMPLIANT R ADAR S YSTEM In 2002, MSSI developed a portable, battery operated, radar sensor nicknamed “SPIDER”, for “Short PulseIntrusion Detection Radar”, which was the first UWB system-level product to receive FCC approval under the new Part 15 Subpart F regulations. Originally developed under a DARPA contract for micro air vehicle collision and obstacle avoidance applications [5], the FCC-certified version of this sensor operated in the 6020-6699 MHz band under Subpart F Part 15.511 “Technical requirements for surveillance systems” [6]. Operation under 15.511, however, is limited to fixed surveillance systems operated by law enforcement, fire or emergency rescue organizations or by manufacturers licensees, petroleum licensees or power licensees as defined in FCC Section 90.7 (“Part 90” users).In March 2005, the FCC significantly expanded the application space for UWB equipment that operates in the Part 15.205 non-restricted band segment from 5925-7250 MHz by creating Part 15.250 for general UWB applications [7]. While the original SPIDER radar sensor could have been recertified for use under 15.250, significant advances had been made in UWB technology since early 2002, and a new radar design incorporating these advances was developed. The new, Part 15.250 compliant, radar sensor is called RADEKL (see Figure 8), “Radar Developers’ Kit ‘Lite’”, as it is designed specifically for radar applications engineers.Figure 8. RADEKL UWB Radar Sensor with Single Board Design(antenna radome removed)Except for its lower radiated power level, and hence morelimited range, RADEKL is an advanced version of both the Perimeter Intrusion Detection and OAR radars described above. The radar utilizes 256 range bins, each having 30 cm range resolution and 5-bit amplitude return quantization. The detection range to a person was approximately 60 feet.RADEKL uses a UWB transmitter design which was taken from MSSI’s FCC-certified, real time location system (RTLS) tags. The transmitter electronics is mounted on a 7 x 10 mm thick film ceramic substrate, illustrated in Figure 9. Interestingly, given the patch array antenna gain ofapproximately +11 dBi, the output of this tiny C-band transmitter needs to be further attenuated in order to meet theFCC peak power density of 0 dBm/50 MHz.Figure 9. C-band Thick Film Ceramic Transmitter ChipThe complete radar development environment includes UWB hardware, supporting software drivers and a user interface application (see Figure 10) which permits viewing of the radar return data and data logging for additional return signal post processing.Figure 10. RADEKL Graphical User Interface (GUI) (Return through multiple walls in office building)Table 4. RADEKL Radar CharacteristicsRF Characteristics Frequency 6.0 – 6.6 GHz (-10 dB)Bandwidth 400 MHz (-3dB) Peak EIRP (with antenna) 0 dBm/50 MHz(Variable to-25 dBm/50 MHz)Antenna Gain 11.0 dBi Antenna FOV 40 x 40 degreesSystem Performance Primary Power 1.2 W (12VDC)Receiver Sensitivity -75 dBm for 10 dBS/NDetection Range 345.6 m (max)(1152 ns)STC Control 40 dB Range Resolution 1 foot256 Range BinsInterface USB 2.0Windows XPPhysical CharacteristicsSensor 150 x 83 x 62 mm Weight 490 gramsDemonstrated Detector SensitivityHuman, Standing (6’) 60 feetV. UWB R ANGE M EASURING R ADIOS The last system design to be described also utilizes UWBtechnology for precise range measurements. However, unlike the previous examples, ranging is accomplishedcooperatively by measuring the round trip time of flight between two UWB transceivers. The system is similar in concept to a transponder-based ranging system [8] originally developed for DARPA to track soldiers in GPS-denied urban environments. The present Ranging Radio system was developed for the U.S. Army as a means for preventing soldier fratricide by providing accurate and reliable situational awareness.The ranging radios are illustrated in Figure 11, together with an inside view of the single board design.Figure 11. Ranging Radios withSingle Board UWB Transceiver DesignAs shown, the ranging radios consist of a single circuit card containing both UWB RF and digital timing/processing electronics, and a wideband omnidirectional antenna. The system operates at C-band with an instantaneous -10dB bandwidth of approximately 500 MHz.Range measurements are made within the receiver to a one nanosecond precision utilizing a high-speed tunnel diode detector. With sample averaging, however, a range resolution of approximately 1 inch has been demonstrated. The Ranging Radio architecture is event driven, with each radio only transmitting when commanded to do so either by direct user intervention (console mode via USB) or by wireless request from another radio. All commands and responses to commands are able to be routed through multiple radios to address the hidden node problem. Commands include Range, Discover, Read Memory and Write Memory.The Range command initiates a two-way communications between two radios on the network to determine the round trip time of flight, and hence distance, between the radios. Up to 256 range measurements can be performed with a single command, with each measurement taking approximately 200 microseconds to complete. The Discover command instructs the destination radio to report all other radios that it can communicate with having the same group ID. (Multiple radio groups can operate together.) Read Memory instructs a Ranging Radio to read a specific range of addresses in user memory, whereas Write Memory instructs the radio to write to a range of addresses. User memory on each unit consists of an array of 512 x 8-bits and is available to pass messages or small amounts of data between radios. In a recent implementation, user memory was used to store digitized voice data, permitting the radios to operate as conventional walkie-talkies in addition to the ranging functionality. Windows drivers are provided to interface a computer to the ranging radio for end user software development.To perform a range measurement, a Ranging Radio transmits a packet consisting of a synchronization preamble and header. The header contains the Range command with the address of the radio which is requested to respond to the packet. Upon transmission of the packet, the originating radio resets is main counter, establishing a local time-zero reference. If a Ranging Radio receives a Range request addressed to it, it records the fine time (to 1 nanosecond resolution) at which it received the originating packet (relative to its system clock which generates the packet stream), and then replies with its own packet that includes this fine time information in the header. The originating radio receives the ranging packet from the destination radio, records its fine time and latches its main counter. The range value is then calculated and recorded, utilizing the fine time information to compensate for the difference in time-of-arrival at the destination receiver and the system clock epoch timing which generates the packet data stream.The Ranging Radios were tested at the U.S. Army’s CERDEC facilities in Ft. Monmouth, NJ to assess the effects that propagation through various wall materials has on range measurement accuracy. A variety of “standard”, 1-foot thick walls of various construction (adobe, brick, cinderblock, steel-reinforced concrete, etc.) were used in the testing. As expected, range measurements were elongated as the signal passed through various wall materials, with the amount of elongation directly proportional to the amount of material traversed (e.g., propagation at oblique angles to the wall resulted in more material, and hence, increased delay and range error). Range offsets varied from one to three feet in most building materials, and as much as three to five feet in propagation through steel-reinforced concrete. The former effects were likely due simply to the dielectric properties of the wall medium, where the speed of light is slowed in the wall material. In the case of the steel-reinforced concrete, however, a notable signal loss was also observed. As leading edge pulse detection was employed in the receiver electronics, it is believed that the weaker signal strength resulted in more ambiguity as to the position of the leading edge.Operating at Part 15 levels with omni-directional antennas (as illustrated in Figure 10), the radios have a line-of-sight range in excess of 50 meters. With a directional antenna on receive, link ranges in excess of 200 meters have been obtained. For the Army, higher power transmitter options have been tested with line-of-sight ranges in excess of 1,600 meters using omni-directional antennas and with both transponders placed on the ground. With statistical averaging, range resolutions to better than 3 cm have been achieved. The latest design (see Figure 12) consists of asmall 96 x 59 x 20 mm module weighing 86 grams. The antenna and radome weigh in at 20 grams. Power requirements for the module are 0.8W at 3 to 5 Volts. Either an RS232 or USB data interface can be used.Figure 12: UWB Ranging Radio ModuleRange measurement radios are ideal for positioning applications where GPS is not available (e.g., indoors, underground or in cluttered environments) or in situations where an affordable GPS solution does not provide the required positional accuracy. For example, a Real Time Kinetic (RTK) GPS receiver system, which can provide inch-level location accuracy, can cost upwards of $25,000. Additionally, RTK GPS receivers require clear, open sky, access to the horizon. If a building, high power line or evena streetlight post is in a GPS satellite’s propagation path to the remote receiver, this can cause a multipath reflection which can create location errors. Range measurement radios, on the other hand, perform the equivalent accuracy of expensive GPS solutions at a fraction of the cost and are independent of GPS receiver radio link multipath limitations. End user applications have included industrial safety, situational awareness, localization in GPS-denied environments, tracking for robotic navigation, non line-of-sight surveying and network security (i.e., network access in controlled environments). Since the Ranging Radios can communicate their inter-node distances across a network of such devices, even through intervening walls and obstructions, they have immediate applicability to First Responder rescue.VI. C ONCLUSIONThis invited paper has summarized some recent developments in short pulse electromagnetics as applied to ultra wideband radar and ranging systems. Novel C-band UWB products for intrusion detection, obstacle and collision avoidance and ranging have been described, together with an unique Part 15 radar device for general purpose applications and experimentation.The latest FCC regulations for ultra wideband [7] now permit a wide range of radar and sensor applications in the 5925-7250 MHz, 16.2 – 17.7 GHz and 23.12 – 29.0 GHz bands, with the two upper (millimeter wave) bands expressly limited to vehicular radar applications. The 5925-7250 MHz segment (Part 15.250), where all of the systems described in this paper have been designed to operate, appears to be of particular commercial interest.R EFERENCES[1] Bennett, C.L. and Ross, G.F., “Time-domain electromagnetics and its applications”, Proceedings of the IEEE, March 1978, Vol. 66, No. 3, pp. 299-318.[2] Fontana, R.J., “Recent System Applications of Short-Pulse Ultra-Wideband (UWB) Technology,” Invited Paper, IEEE Trans. Microwave Theory Tech., Vol. 52, No. 9, September 2004, pp. 2087-2104.[3] Gresham, I. et al., “Ultra-Wideband Radar Sensors for Short-Range Vehicular Applications,” Invited Paper, IEEE Trans. Microwave Theory Tech., Vol. 52, No. 9, September 2004, pp. 2105-2122.[4] Richley, E. and R.J. Fontana, “Transceiver System and Method Utilizing Nanosecond Pulses,” U.S. Patent 6,812,884 B2, 2 November 2004.[5] Fontana, R.J., E. Richley, A. Marzullo, L. Beard, R. Mulloy and E.J. Knight, "An Ultra Wideband Radar for Micro Air Vehicle Applications," Proceedings2002 IEEE Conference on Ultra Wideband Systems and Technologies, Baltimore, MD, May 2002.Analysis – Pulsed RF”, November 1971.[6] “Revision of Part 15 of the Commission's Rules Regarding Ultra-Wideband Transmission Systems,” Report and Order in ET Docket No. 98-153, adopted February 14, 2002, released July 15, 2002.[7] “Revision of Part 15 of the Commission's Rules Regarding Ultra-Wideband Transmission Systems,” Second Report and Order and Second Memorandum Opinion and Order in ET Docket No. 98-153, adopted 15 December 2004, released March 11, 2005.[8] Fontana, R.J., “Ultra Wideband Precision Geolocation System,” US Patent No. 6,054,950, 25 April 2000.。
FlexibleUltraWideBand Antenna for WBAN Applications柔性超宽频带天线对WBAN应用1、IntroductionWireless devices and systems based on ultra-wideband (UWB) radio technology, with the frequency allocation of3.1–10.6 GHz, support low output power and highdata rate (110–200 Mb/s) applications over short ranges (4–10 m)[2,8].UWB antennasmust be electrically small and inexpensive without compromising on performance.UWB canbe effectively used for WBAN due to its ultra-low power consumption, and large bandwidth availability.In February2004, Federal communications commission (FCC) allocates unlicensed frequency band of 3.1-10.6 GHz for UWBapplications.For on-body and off-body communications, [6] IEEE802.15.6 specifies both narrow band andwideband frequency areas, such as industrial, scientific and medical (ISM) at 868 MHz (in the EU), 915 MHz (in theUS), 2.4 GHz (in the EU & the US) or UWB at 3.1-10.6 GHz.(Background Information & Introduction to Topic)无线设备和系统是以超宽带无线电技术为基础的,频率分配为3.1 - 10.6 GHz,支持低输出功率和高数据率(110 - 200mb / s)在短范围内的应用(4 - 10 m)。
一维超宽带阵列天线时域波束扫描分析张昀剑;熊灵;高鹏【摘要】宽带雷达作为一种新体制雷达,具有优越的反隐身能力、强的抗干扰能力、极高的距离分辨率等诸多优点.相对于传统相控阵雷达,超宽带雷达采用实时延时技术替代传统的移相器进行波束控制.该文章基于超宽带雷达相关理论进行了时域超宽带阵列天线波束扫描研究.采用对拓维瓦尔迪天线设计了四单元均匀直线超宽带阵列并进行了时域仿真及实验测试.结果表明,该阵列在X-Z平面可以实现±40°的波束扫描.阵列规模由天线单元间距决定,通过精确仿真分析天线单元间距使波束合成效果达到最优化.阵列的峰峰值方向图仿真验证了时域波束扫描理论是可行的,同时论证了实时延时技术可以被集成到时域雷达中以实现实时扫描.【期刊名称】《火控雷达技术》【年(卷),期】2013(042)002【总页数】6页(P87-92)【关键词】超宽带;天线阵列;波束扫描;峰峰值方向图;时域【作者】张昀剑;熊灵;高鹏【作者单位】电子科技大学成都611731;电子科技大学成都611731;电子科技大学成都611731【正文语种】中文【中图分类】TN821 引言相比于传统窄带系统,相对带宽大于25%的超宽带技术被广泛证明具有巨大优势[1]。
信号的宽带特性使超宽带技术吸引了大量学者研究其应用,例如遥感遥测、穿墙雷达、个人无线通信系统等[2-6]。
基于频域的窄带天线分析方法已经非常成熟,但对于超宽带天线来说该方法具有一定局限性。
超宽带时域激励信号具有很宽的频谱,若要得到天线辐射或接收的时域特性,需要对多频点的频域数据进行傅里叶逆变换,实现方法难度较大且繁琐。
时域方法通过高速采样示波器直接获取时域数据,进行一次傅里叶变换即可得到完整的频谱,能够更便捷直观地表示信号传播特性[7]。
与传统雷达系统相比,基于超宽带天线的时域超宽带雷达具有诸多优势[8-10]。
为提高雷达对目标的探测能力,需要对辐射波束进行赋形,因此采用超宽带天线组成阵列作为超宽带雷达的接收/发射天线是一种行之有效的方法[11]。
一种高隔离度双频MIMO天线王利红【摘要】文中设计一种具有高隔离度的双频MIMO天线.将两款宽带毫米波天线垂直正交地放置于FR-4介质基板上,得到结构紧凑的双端口极化分集天线和四端口MIMO天线,利用其相互正交的极化方式提高了相邻端口间的隔离度.为了满足双频特性,分别在两天线单元的辐射贴片上刻蚀半圆环形和U形缝隙,地面开了长方形槽.通过HFSS仿真分析表明,所设计的天线可工作在28 GHz(24.5~29 GHz)和39 GHz(36~47 GHz),且在工作频段内具有较好的辐射特性,相邻端口间的隔离度达到了30 dB以上.同时,在天线上方加载了4根金属条作为引向器,提高了天线的增益.【期刊名称】《现代电子技术》【年(卷),期】2019(042)005【总页数】4页(P36-39)【关键词】MIMO;双频;高隔离度;毫米波;高增益;极化分集【作者】王利红【作者单位】山西大同大学物理与电子科学学院,山西大同 037009【正文语种】中文【中图分类】TN823-340 引言5G 无线通信系统得到了全球企业、研究院所和高校的广泛关注[1]。
与4G 相比,其主要特点之一就是转向了容易获得且带宽更宽的高频段[2⁃3],FCC 公布将24 GHz以上频段用于5G 移动宽带运营,分别为[4]28 GHz,37 GHz,39 GHz 和64~71 GHz。
MIMO 技术在无线通信系统中得到了广泛的应用,因此设计一种工作于高频段的毫米波MIMO 天线也成了一个重要的研究方向[5⁃10]。
为了提高天线端口间的隔离度,文献[6⁃7]在天线地面开了长方形槽,结构简单但隔离度只达到20.6 dB 和17 dB。
文献[8]采用EBG 结构去耦的方式,使天线的隔离度达到30 dB,但天线结构较复杂,且为窄频带。
本文设计了两款辐射贴片上刻蚀一定结构缝隙的双频毫米波宽带天线,并组合使其极化方式正交,得到了高隔离度且结构紧凑的双端口极化分集天线和四端口MIMO 天线。
与uwb相关的经典文献关于UWB(Ultra-Wideband)技术的经典文献有很多,以下是一些比较经典的文献:1. "Ultra-Wideband Radio Technology",作者,Faranak Nekoogar。
这本书是关于UWB技术的全面介绍,涵盖了UWB通信系统的基本原理、信号处理、天线设计等方面。
2. "Ultra-Wideband, Short-Pulse Electromagnetics",作者,Vitaliy Zhurbenko。
这本书主要介绍了UWB技术在电磁学领域的应用,包括雷达、通信、无线传感器网络等方面。
3. "Ultra-Wideband Wireless Communication",作者,Mohammad Matin。
这本书介绍了UWB通信系统的基本原理、调制解调技术、多址接入技术等内容,适合对UWB通信感兴趣的读者阅读。
4. "Ultra-Wideband Antennas and Propagation for Communications, Radar and Imaging",作者,Kamil Agi。
这本书主要介绍了UWB天线设计及其在通信、雷达和成像领域的应用。
除了以上提到的书籍,还有很多学术期刊和会议论文也涉及到UWB技术的研究,比如IEEE Transactions on Ultra-Wideband Communications、IEEE International Conference on Ultra-Wideband等。
这些期刊和会议论文提供了大量关于UWB技术的最新研究成果和发展动态。
总的来说,UWB技术作为一种新兴的无线通信技术,其相关文献和研究成果在近年来不断涌现,读者可以通过查阅以上提到的书籍和学术期刊论文来了解UWB技术的最新发展和应用。
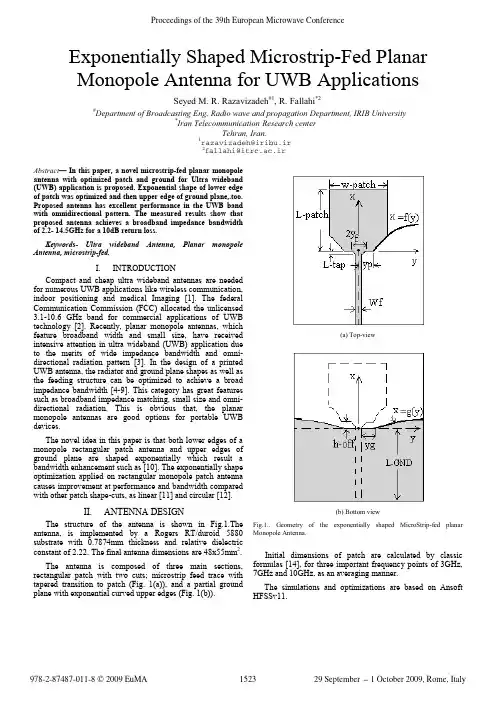
Ultra-Wideband Microstripe Antenna Design陳建宏Chien-Hung Chen摘要近十年來由於微帶天線具有體積小、重量輕、製作容易、價格低廉、可信度高,同時可附著於任何物體之表面上的特性,在無線通訊的應用上扮演著重要的角色。
本文將利用全平面正方形單極微帶天線當作設計天線的原型,藉由調整金屬貼片的上緣、下緣部份與接地面的上緣部份來研製適用於超寬頻通訊系統的微帶天線。
由模擬與實驗結果比較得知,可以發現其響應非常吻合,是一個適用於超寬頻通訊產品的天線。
關鍵詞:微帶天線、單極、超寬頻、簡介美國聯邦通信委員會(Federal Communication Commission,FCC)在西元2002年2月14日允許超寬頻技術使用於消費性電子產品上,並公佈了初步規格,FCC開放3.1GHz~10.6GHz提供超寬頻通信及測試使用。
為了研究開發適用於此頻段的天線技術。
將利用微帶天線的優點:體積小、重量輕、低成本、容易製作等特性,來研製適用於超寬頻通訊系統的微帶天線。
傳統的寬頻天線[2]中有行進波線天線(Traveling-Wave Wire Antenna)、螺旋形天線(Helical Antenna)、偶極圓錐形天線(Biconical Antenna)、單極圓錐形天線(Monoconical Antenna)、盤錐形天線(Discone Antenna)、袖子形天線(Sleeve Antenna)、渦狀天線(Spiral Antenna)和對數週期天線(Log-Periodic Antenna),不過其中適用於超寬頻系統的只有偶極圓錐形天線、單極圓錐形天線和盤錐形天線[3]。
因為其不僅有大的輸入阻抗頻寬(Large Input Impedance Bandwidth)、其輻射場形(Radiation Pattern)也能控制在一定的頻寬中。
利用虛像法(Method of Image)[4]及接地面(Ground Plane)來使偶極天線變成單極天線,從早期的線型單極天線-窄頻(Narrowband),演化成單極圓錐形天線-中頻寬(Intermediate),到最後的火山煙狀天線(V olcano Smoke Antenna)-寬頻(Broadband)[5]。
Supplemental Files – ARRL Antenna Book, 24th Edition Supplemental files are included with the downloadable content. They include additional discussion, related articles, additional projects, construction details and other useful information. All of these packages are available in the Supplemental Files directory and then organized by chapter. (Note: Chapters 2 and 28 have no supplemental files.)Chapter 1Supplemental Articles∙“Radio Mathematics” — supplemental information about math used in radio and a list of online resources and tutorials about common mathematics∙“Why an Antenna Radiates” by Kenneth MacLeish, W7TXChapter 3Supplemental Articles∙“Determination of Soil Electrical Characteristics Using a Low Dipole” by Rudy Severns, N6LF∙“Maxi mum-Gain Radial Ground Systems for Vertical Antennas” by Al Christman, K3LC∙“Radiation and Ground Loss Resistances In LF, MF and HF Verticals: Parts 1 and 2”by Rudy Severns, N6LF∙“Some Thoughts on Vertical Ground Systems over Seawater” by Rudy Severns, N6LF∙“The Case of Declining Beverage-on-Ground Performance” by Rudy Severns, N6LF ∙FCC Ground Conductivity Map SetChapter 4Supplemental Articles∙Antenna Book Table 4.3 expanded for other locations∙“Using Propagation Predictions fo r HF DXing” b y Dean Straw N6BVSupplemental Articles∙“An Update on Compact Transmitting Loops” by John Belrose, VE2CV∙“A Closer Look at Horizontal Loop Antennas” by Doug De Maw, W1FB∙“The Horizontal Loop —An Effective Multipurpose Antenna” by Scott Ha rwood, K4VWK∙“Small Gap-resonated HF Loop Antenna Fed by a Secondary Loop” by Kai Siwiak, KE4PT and R. Quick, W4RQ∙“Active Loop Aerials for HF Reception Part 1: Practical Loop Aerial Design, and Part 2: High Dynamic Range Aerial Amplifier Design,” by Ch ris Trask, N7ZWYChapter 6Supplemental Articles∙Appendix B — Manual Calculations for Arrays∙“A Wire Eight-Circle Array (for 7 MHz)” by Tony Preedy, G3LNP∙“A Study of Tall Verticals” by Al Christman, K3LC∙“Tall Vertical Arrays” by Al Christman, K3LC∙“The Simplest Phased Array Feed System —That Works” by Roy Lewellan, W7EL Note: EZNEC modeling files are in the separate ARRL Antenna Modeling Files folder with the downloadChapter 7Supplemental Articles∙5‐Band LPDA Construction Project and Telerana Construction Project∙“An Updat ed 2 Meter LPDA” by Andrzej Przedpelsi, KØABP∙Log Periodic‐Yagi Arrays∙"Practical High-Performance HF Log Periodic Antennas" by Bill Jones, K8CU∙“Six Band, 20 through 6 Meter LPDA” by Ralph Crumrine, NØKC∙"The Log Periodic Dipole Array" by Peter Rhodes, K4EWG∙“Using LPDA TV Antennas for the VHF Ham Bands” by John Stanley, K4ERO∙“Vee S haped Elements vs Straight Elements” by John Stanley, K4EROSupplemental Articles∙EZNEC Modeling Tutorial by Greg Ordy, W8WWVChapter 9Supplemental Articles∙“Designing a Shortened Antenna” by Luiz Duarte Lopes, CT1EOJ∙“A 6-Foot-High 7-MHz Vertical” by Jerry Sevick, W2FMI∙“A Horizontal Loop for 80-Meter DX” by John Belrose, VE2CV∙“A Gain Antenna for 28 MHz” by Brian Beezley, K6STI∙“A Low-Budget, Rotatable 17 Meter Loop” by Howard Hawkins, WB8IGU∙“A Simple Broadband Dipole for 80 Meters” by Frank Witt, AI1H∙“A Wideband Dipole for 75 and 80 Meters” by Ted Armstrong, WA6RNC∙“A Wideband 80 Meter Dipole” by Rudy Severns, N6LF∙“Broad-Band 80-Meter Antenna” by Allen Harbach, WA4DRU∙“Broad-banding a 160 m Vertical Antenna” by Grant Saviers, KZ1W∙“Inductively Loaded Dipoles”∙“Off-Center Loaded Antennas” by Jerry Hall, K1PLP∙“Th e 3/8-Wavelength Vertical —A Hidden Gem” by Joe Reisert, W1JR∙“The 160-Meter Sloper System at K3LR” by Al Christman, KB8I, Tim Duffy, K3LR and Jim Breakall, WA3FET∙“The ‘C-Pole’ —A Ground Independent Vertical Antenna” by Brian Cake, KF2YN∙“The Compact Vertical Dipole”∙“The Half-Delta Loop —A Critical Analysis and Practical Deployment” by John Belrose, VE2CV and Doug DeMaw, W1FB∙“The K1WA 7-MHz Sloper System”∙“The K4VX Linear-Loaded Dipole for 7 MHz” by Lew Gordon, K4VX∙“The Story of the Broadband Dipole” by Dave Leeson, W6NL∙“The W2FMI Ground-Mounted Short Vertical” by Jerry Sevick, W2FMI∙“Use Your Tower as a Dual-Band, Low-Band DX Antenna” by Ted Rappaport, N9NB, and Jim Parnell, W5JAWSupplemental Articles∙“A Compact Multiband Dipole” by Zack Lau, W1VT∙“A No Compromise Off-Center Fed Dipole for Four Bands” by Rick Littlefield, K1BQT ∙“A Triband Dipole for 30, 17, and 12 Meters” by Zack Lau, W1VT∙“An Effective Multi-Band Aerial of Simple Construction” by Louis Varney, G5RV (Original G5RV article)∙“An Experimental All-Band Non-directional Transmitting Antenna,” by G.L.Countryman, W3HH∙“An Improved Multiband Trap Dipole Antenna” by Al Buxton, W8NX∙“Broadband Transmitting Wire Antennas for 160 through 10 Meters” b y Floyd Koontz, WA2WVL∙“Cat Whiskers — The Broadband Multi-Loop Antenna” by Jacek Pawlowski, SP3L∙“End-Fed Antennas” by Ward Silver, NØAX∙“HF Discone Antennas”∙“HF Discone Antenna Projects” by W8NWF∙“Nested Loop Antennas” by Scott Davis, N3FJP∙“Revisiting the Double‐L” by Don Toman, K2KQ∙“Six Band Loaded Dipole Antenna” by Al Buxton, W8NX∙“The HF Discone Antenna” by John Belrose, VE2CV∙“The J78 Antenna: An Eight-band Off-Center-Fed HF Dipole” by Brian Machesney, K1LI/J75Y∙“The Multimatch Antenna System” by Chester Buchanan, W3DZZ∙“The Open Sleeve Antenna” by Roger Cox, WBØDGF∙“The Open-Sleeve Antenna” from previous editions∙“Two New Multiband Trap Dipoles” by Al Buxton, W8NX∙“Wideband 80 Meter Dipole” by Rudy Severns, N6LFSupplemental Articles∙“A 10 Meter Moxon Beam” by Allen Baker, KG4JJH∙“A 20 Meter Moxon Antenna” by Larry Banks, W1DYJ∙“Construction of W6NL Moxon on Cushcraft XM240” by Dave Leeson, W6NL∙“Having a Field Day with the Moxon Rectangle” by L.B. Cebik, W4RNL∙“Multimatch Antenna System” by Chester Buchanan, W3DZZ (see the Chapter 10 folder)Chapter 12Supplemental Articles∙“A Dipole Curtain for 15 and 10 Meters” by Mike Loukides, W1JQ∙“Bob Zepp: A Low Band, Low Cost, High Performance Antenna - Parts 1 and 2” by Robert Zavrel, W7SX∙“Curtains for You” by Jim Cain, K1TN (including Feedback)∙“Hands-On Radio Experiment #133 –Extended Double Zepp Antenna” by Ward Silver, NØAX∙“The Extended Double Zepp Revisited” by Jerry Haigwood, W5J H∙“The Extended Lazy H Antenna” by Walter Salmon VK2SA∙“The Multiband Extended Double Zepp and Derivative Designs” by Robert Zavrel, W7SX∙“The N4GG Array” by Hal Kennedy, N4GG∙“The W8JK Antenna: Recap and Update” by John Kraus, W8JKChapter 13Supplemental Articles∙“A Four Wire Steerable V Beam for 10 through 40 Meters” by Sam Moore, NX5ZSupplemental Articles∙“Station Design for DX, Part I” by Paul Rockwell, W3AFM∙“Station Design for DX, Part II” by Paul Rockwell, W3AFM∙“Station Design for DX, Part III” by Paul Rockwell, W3AFM∙“Station Design for DX, Part IV” by Paul Rockwell, W3AFM∙N6BV and K1VR Stack Feeding and Switching Systems∙“Generating Terrain Data Using MicroDEM” - from previous editions∙“All About Stacking” by Ken Wolff, K1EAChapter 15Supplemental Articles∙“2 × 3 = 6” by L.B. Cebik, W4RNL∙“A 6 Meter Moxon Antenna” by Allen Baker, KG4JJH∙“A 902-MHz Loop Yagi Antenna” by Don Hilliard, WØPW∙“A Short Boom, Wideband 3 Element Yagi for 6 Meters” by L.B. Cebik, W4RNL∙“A VHF/UHF Discone Antenna” by Bob Patterson, K5DZE∙“An Optimum Design for 432 MHz Yagis —Parts 1 and 2” by Steve Powlishen, K1FO∙“An Ultra-Light Yagi for Transatlantic and Other Extreme DX” by Fred Archibald, VE1FA, including the EZNEC model∙“Building a Medium-Gain, Wide-Band, 2 Meter Yagi” by L.B. Cebik, W4RNL∙“C Band TVRO Dishes” from previous editions∙“Development and Real World Replication of Modern Yagi Antennas (III) — Manual Optimisation of Multiple Yagi Arrays” by Justi n Johnson, GØKSC ∙“High-Performance ‘Self-Matched’ Yagi Antennas” by Justin Johnson, GØKSC∙“High-Performance Yagis for 144, 222 and 432 MHz” by Steve Powlishen, K1FO∙“LPDA for 2 Meters Plus” by L.B. Cebik, W4RNL∙“Making the LFA Loop” by Justin Johns on, GØKSC∙“Microwavelengths —Microwave Transmission Lines” by Paul Wade, W1GHZ∙“RF — A Small 70-cm Yagi” by Zack Lau, W1VT∙“The Helical Antenna—Description and Design” by David Conn, VE3KL∙“Three-Band Log-Periodic Antenna” by Robert Heslin, K7RT Y/2∙“Using LPDA TV Antennas for the VHF Ham Bands” by John Stanley, K4ERO∙“V-Shaped Elements versus Straight Elements” by John Stanley, K4EROSupport Files∙Model files and sample radiation patterns for Yagi designs by Justin Johnson, GØKSC (require EZNEC PRO/4 to reproduce the gain and other performancespecifications listed) These files are located in the ARRL Antenna ModelingFiles folder included with the download.Chapter 16Supplemental Articles∙5/8-Wavelength Whips for 2 Meters and 222 MHz∙“6-Meter Halo Antenna for DXing” by Jerry Clement, VE6AB∙“A 6m Hex Beam for the Rover” by Darryl Holman, WW7D∙“A 6 Meter Halo” by Paul Danzer, N1II∙“A New Spin on the Big Wheel” by L.B. Cebik, W4RNL and Bob Cerreto, WA1FXT ∙“A Simple 2 Meter Bicycle-Motorcycle Mobile Anten na” by John Allen, AA1EP∙“A Two‐Band Halo for V.H.F. Mobile” by Ed Tilton, W1HDQ∙“A VHF‐UHF 3‐Band Mobile Antenna” by J.L. Harris, WD4KGD∙“Bicycle-Mobile Antennas” by Steve Cerwin, WA5FRF and Eric Juhre, KØKJ∙“Introduction to Roving” by Ward Silver, NØAX∙“Omnidirectional 6 Meter Loop” by Bruce Walker, N3JO∙“Six Meters from Your Easy Chair” by Dick Stroud, W9SR∙“The DBJ-2: A Portable VHF-UHF Roll-up J-pole Antenna for Public Service” by Edison Fong, WB6IQN∙“The VHF-UHF Contest Rover Experience —Parts 1 and 2” by Greg Jurr ens, K5GJSupplemental Articles∙“A 12‐Foot Stressed Parabolic Dish” by Richard Knadle, K2RIW∙“A Parasitic Lindenblad Antenna for 70 cm” by Anthony Monteiro, AA2TX∙“A Portable Helix for 435 MHz” by Jim McKim, WØCY∙“A Simple Fixed Antenna for VHF/UHF Satellite Work” by L.B. Cebik, W4RNL∙“An EZ‐Lindenblad Antenna for 2 Meters” by Anthony Monteiro, AA2TX∙“Build a 2-Meter Quadrifilar Helix Antenna” by David Finell, N7LRY∙Converted C‐Band TVRO Dishes from previous editions∙“Double-Cross Antenna –A NOAA Satellite Downlink Antenna” by G erald Martes, KD6JDJ∙“EME with Adaptive Polarization at 432 MHz” by Joe Taylor, K1JT, and Justin Johnson, GØKSC∙“Inexpensive Broadband Preamp for Satellite Work” by Mark Spencer, WA8SME∙“L B and Helix Antenna Array” by Clare Fowler, V E3NPC∙“Quadrifilar Helix As a 2 Meter Base Station Antenna” by John Portune, W6NBC∙“Simple Dual-Band Dish Feed for Es’hail-2 QO-100” by Mike Willis, GØMJW; Remco den Besten, PA3FYM; and Paul Marsh, MØEYT∙Space Communications Antenna Examples from previous editions∙“The W3KH Quadrifilar Helix” by Eugene Ruperto, W3KH (plus two Feedback items)∙“Two‐Meter Eggbeater” by Les Kramer, WA2PTS and Dave Thornburg, WA2KZV∙“Work OSCAR 40 With Cardboard‐Box Antennas” by Anthony Monteiro, AA2TX∙“WRAPS: A Portable Satellite Antenna Rotator System” by Mark Spencer,WA8SME∙“WRAPS Rotat or Enhancements Add a Second Beam and Circular Polarization” by Mark Spencer, WA8SMESupplemental Articles∙“A 70-cm Power Divider” by Zack Lau, W1VT∙“Feeding Open-Wire Line at VHF and UHF” by Zack Lau, W1VT∙“Rewinding Relays for 12 V Operation,” by Paul Wade, W1GHZ∙“Increasing Side Suppression by Using Loop-Fed Directional Antennas” by Justin Johnson, GØKSCChapter 19Supplemental Articles∙“6 Meter 4 Element Portable Yagi” by Zack Lau, W1VT (plus separate element design drawing)∙“A 6-Meter Portable Yagi Antenna” by Scott McCann, W3MEO∙“A One Person, Safe, Portable and Easy to Erect Antenna Mast” by Bob Dixon, W8ERD∙“A Portable 2‐Element Triband Yagi” by M arkus Hansen, VE7CA∙“A Portable End-Fed Half-Wave Antenna for 80 Meters” by Rick Littlefield, K1BQT ∙“A Portable Inverted V Antenna” by Joseph Littlepage, WE5Y∙“A Simple and Portable HF Vertical Travel Antenna” by Phil Salas, AD5X∙“A Simple HF-Portable Antenna” by Phil Salas, AD5X∙“A Small, Portable Dipole for Field Use” by Ron Herring, W7HD∙“A Super Duper Five Band Portable Antenna” by Clarke Cooper, K8BP∙“A Two-Element Yagi for 18 MHz” by Martin Hedman, SMØDTK∙“An Off Center End Fed Dipole for Portable Operation on 40 to 6 Meters” by Kai Siwiak, KE4PT∙“Compact 40 Meter HF Loop for Your Recreational Vehicle” by John Portune, W6NBC∙“Fishing for DX with a Five Band Portable Antenna” by Barry Strickland, AB4QL∙“Getting the Antenna Aloft” b y Stuart Thomas, KB1HQS∙Ladder Mast and PVRC Mount∙“The Black Widow —A Portable 15 Meter Beam” by Allen Baker, KG4JJH∙“The Ultimate Portable HF Vertical Antenna” by Phil Salas, AD5X∙“The W4SSY Spudgun” by Byron Black, W4SSY∙“Tuning Electrically Short Antennas for Field Operation” by Ulrich Rohde, N1UL, and Kai Siwiak, KE4PT∙“Three-Element Portable 6 Meter Yagi” by Markus Hansen, VE7CA∙“Zip Cord Antennas and Feed Lines for Portable Applications” by William Parmley, KR8LChapter 20Supplemental Articles∙“A Compact Loop Antenna for 30 through 12 Meters” by Robert Capon, WA3ULH∙“A Disguised Flagpole Antenna” by Albert Parker, N4AQ∙“A 6-Meter Moxon Antenna” by Allen Baker, KG4JJH∙“An All-Band Attic Antenna” by Kai Siwiak, KE4PT∙“An Antenna Idea for Restricted Communities” by Cristian Paun, WV6N∙“Apartment Dweller Slinky Jr Antenna” by Arthur Peterson, W7CZB∙“Better Results with Indoor Antennas” by Fred Brown, W6HPH∙“Honey, I Shrunk the Antenna!” by Rod Newkirk, W9BRD∙“Small Hi gh‐Efficiency Loop Antennas” by Ted Hart, W5QJR∙“Short Antennas for the Lower Frequencies – Parts 1 and 2” by Yardley Beers, WØJF∙“Stealth 6-Meter Wire Beam” by Bruce Walker, N3JO∙Tuning Capacitors for Transmitting Loops∙“Using LPDA TV Antennas for the VHF Ham Bands” by John Stanley, K4EROSupplemental Articles∙“How To Build A Capacity Hat” by Ken Muggli, KØHL∙“Screwdriver Mobile Antenna” by Max Bloodworth, KO4TV∙“Table of Mobile Antenna Manufacturers” by Alan Applegate, KØBGChapter 22Supplemental Articles•“A Four-Way DFer” by Malcolm Mallette, WA9BVS•“A Fox-Hunting DF Twin Tenna” by R.F Gillette, W9PE•“A Receiving Antenna that Rejects Local Noise” by Brian Beezley, K6STI•“A Reversible LF and MF EWE Receive Antenna for Small Lots” by Michael Sapp, WA3TTS•“Active Antennas” by Ulrich Rohde, N1UL•“Beverages in Echelon”•“Design, Construction and Evaluation of the Eight Circle Vertical Array for Low Band Receiving” by Joel Harrison, W5ZN and Bob McGwier, N4HY•“Fl ag, Pennants and Other Ground-Independent Low-Band Receiving Antennas” by Earl Cunningham, K6SE•“Ferrite-Core Loop Antennas”•“Introducing the Shared Apex Loop Array” by Mark Bauman, KB7GF•“Is This EWE for You?” by Floyd Koontz, WA2WVL•“K6STI Low-No ise Receiving Antenna for 80 and 160 Meters” by Brian Beezley, K6STI•“Modeling the K9AY Loop” by Gary Breed, K9AY•“More EWEs for You” by Floyd Koontz, WA2WVL•“Rebuilding a Receiving Flag Antenna for 160 Meters” by Steve Lawrence, WB6RSE •“Simple Dir ection-Finding Receiver for 80 Meters” by Dale Hunt, WB6BYU•“The AMRAD Active LF Antenna” by Frank Gentges, KØBRA•“The Snoop-Loop” by Claude Maer, WØIC•“Transmitter Hunting with the DF Loop” by Loren Norberg, W9PYGSupplemental Articles∙“Coaxial RF Connectors for Microwaves” by Tom Williams, WA1MBA∙“Hands-On Radio: Open Wire Transmission Lines” by Ward Silver, NØAX∙“Hands-On Radio: SWR and Transmission Line Loss” by Ward Silver, NØAX∙“Hands-On Radio: Choosing a Feed Line” by Ward Silver, NØAX∙“Hands-On Radio: Feed Line Comparison” by Ward Silver, NØAX∙“Installing Coax Crimp Connectors” by Dino Papas, KLØS∙“Microwave Plumbing” by Paul Wade, W1GHZ∙“Multiband Operation with Open-wire Line” by George Cutsogeorge, W2VJN∙“My Feedline Tunes My Antenna” by Byron Goodman W1DX∙RF Connectors and Transmission Line Information ‐ ARRL Handbook∙Smith Chart supplement∙“The Doctor Is In: Yes, Window Line Can be Spliced —If You Must” by Joel Hallas, W1ZR∙“Using RG58 coaxial crimp connectors with RG6 cable” by Garth Jenkinson, VK3BBKChapter 24∙“Baluns in Matching Units” by Robert Neece, KØKR∙“Broadband Antenna Matching”∙“Coiled-Coax Balun Measurements” by Ed Gilbert, K2SQ∙“Compact 100-W Z-Match Antenna Tuner” by Phil Sala s, AD5X∙“Demystifying the Smith Chart” by Michael J. Toia, K3MT∙“Don’t Blow Up Your Balun” by Dean Straw, N6BV∙“Factors to be Considered in Matching Unit Design” by Robert Neece, KØKR∙“Hairpin Tuners for Matching Balanced Antenna Systems” by John Stanley, K4ERO ∙“High-Power ARRL Antenna Tuner” by Dean Straw, N6BV∙“Matching with Inductive Coupling”∙“Matching-Unit Circuit Comparison Table” by Robert Neece, KØKR∙“Optimizing the Performance of Harmonic Attenuation Stubs” by George Cutsogeorge, W2VJN∙“Tapered Lines” from previous editions∙“The AAT — Analyze Antenna Tuner —Program” by Dean Straw, N6BV∙“The EZ Tuner —Parts 1, 2, and 3,” by Jim Garland, W8ZR∙“The Quest for the Ideal Antenna Tuner” by Jack Belrose, VE2CV∙“Why Do Baluns Burn Up?” by Zack Lau, W1VTChapter 25Supplemental Articles∙“K5GO Half-Element Designs” by Stan Stockton, K5GO∙“Conductors for HF Antennas” by Rudy Severns, N6LF∙“Insulated Wire and Antennas” by Rudy Severns, N6LF∙“3D-Printed Coax-to-Wire Connection Blocks” by John Portune, W6NBCChapter 26Supplemental Articles∙“A One Person, Safe, Portable and Easy to Erect Antenna Mast” by Bob Dixon, W8ERD∙“Antenna Feed Line Control Box” by Phil Salas, AD5X∙“Homeowners Insurance and Your Antenna System” by Ray Fallen, ND8L∙“Installing Yagis in Trees” by Steve Morris, K7LXC∙“Is Your Tower Still Safe?” by Tony Brock‐Fisher, K1KP∙Ladder Mast and PVRC Mount∙“Lightning Protection for the Amateur Station, Parts 1, 2 and 3” by Ron Block, KB2UYT∙“Removing and Refurbishing Towers” by Steve Morris, K7LXC∙Rotator Specifications∙“The Care and Feeding of an Amateur’s Favorite Antenna Support —The Tree” by Doug Brede, W3AS∙“The Tower Shield” by Baker Springfield, W4HYY and Richard Ely, WA4VHMChapter 27Supplemental Articles∙“A Reflectometer for Twin-Lead” by Fred Brown, W6HPH∙“An Inexpensive VHF Directional Coupler” and “A Calorimeter for VHF and UHF Power Measurements”∙“Antenna Analyzer Pet Tricks” by Paul Wade, W1GHZ∙“Build a Super-Simple SWR Indicator” by Tony Brock-Fisher, K1KP∙“Improving and Using R-X Noise Bridges” by John Grebenkemper, KI6WX∙“Microwavelengths —Directional Couplers” by Paul Wade, W1GHZ∙“On Tuning, Matching and Measuring Antenna Systems Using a Hand Held SWR Analyzer” by John Belrose, VE2CV∙RF Power Meter (Kaune) support files∙“QRP Person’s VSWR Indicator” by Doug DeMaw, W1FB∙“Smith Chart Calculations”∙“SWR Analyzer Tips, Tricks, and Techniques” by George Badger, W6TC, et al∙“Technical Correspondence — A High-Power RF Sampler” by Tom Thompson WØIVJ (plus “More on a High-Power RF Sampler” by Thompson, two files)∙* “The Noise Bridge” by Jack Althouse, K6NY∙“Time Domain Reflectometry” from previous editions∙“The Gadget — An SWR Analyzer Add-On” by Fred Hauff, W3NZ∙“The No Fibbin RF Field Strength Meter” by John Noakes, VE7NI∙“The SWR Analyzer and Transmission Lines” by Peter Schuch, WB2UAQ∙“The Tandem Match —An Accurate Directional Wattmeter” by John Grebenkemper, KA3BLO (plus corrections and updates, four files)∙“Using Single-Frequency Antenna Analyzers” from previous editionsRepeater Antenna Systems Supplemental Articles144 MHz Duplexer CavitiesAntenna Fundamentals 1-1。
第19卷 第3期太赫兹科学与电子信息学报Vo1.19,No.3 2021年6月 Journal of Terahertz Science and Electronic Information Technology Jun.,2021 文章编号:2095-4980(2021)03-0438-05超宽带双极化交叉偶极子天线设计陈盛嘉,陈星(四川大学电子信息学院,四川成都 610064)摘 要:提出一种结构简单的新型超宽带双极化天线。
采用交叉偶极子天线实现双线极化;每只偶极子天线由两个八边形环振子构成,同时在八边形环内部加载寄生枝节,引入新谐振点增加天线带宽;天线结构紧凑,尺寸仅为0.3λL 0.3λL(λL为低频截止频率对应的空间自由波长)。
对天线进行加工测试,测试结果表明,该天线在 1.24~4.42 GHz能够实现电压驻波比(VSWR)<2,相对带宽达到125%,方向图带宽为95%(1.24~3.60 GHz)。
天线定向辐射性能良好,在方向图带宽内增益大于7 dB。
关键词:双极化;超宽带;交叉偶极子天线;定向辐射中图分类号:TN821+.4 文献标志码:A doi:10.11805/TKYDA2021009Design of cross dipole antenna with ultra-wide band anddual-polarization propertiesCHEN Shengjia,CHEN Xing(School of Electronic and Information Engineering,Sichuan University,Chengdu Sichuan 610064,China)Abstract:A new type of ultra-wide band dual-polarized antenna with simple structure is presented.The antenna uses cross dipole antennas to generate dual polarization, each dipole antenna is composed oftwo octagonal rings. The stubs are loaded inside the octagonal ring to introduce new resonance frequencypoints, which greatly increases the bandwidth. The presented antenna has a compact structure with aplanar size of only 0.3λL×0.3λL, where λL is the wavelength corresponding to the lowest frequency withinthe whole working frequency band. An antenna sample has been fabricated and tested. The measuredresults show that the antenna can achieve Voltage Standing Wave Ratio(VSWR)<2 in 1.24-4.42 GHz. Therelative bandwidth is 125% and the pattern bandwidth is 95%(1.24-3.60 GHz). The directional radiationperformance is good, and the gain in the pattern bandwidth is greater than 7dB.Keywords:dual-polarization;ultra-wide band;cross dipole antenna;directional radiation随着无线通信技术的发展,在基站、陆地移动无线电设备、数据采集与监控系统、应急通信以及其他众多通信领域,对天线设计提出了苛刻的要求,需要定向天线同时具有超宽带、双线极化和结构紧凑等特性。

Chapter3UWB AntennasContents3.1Antenna Requirements (31)3.2Radiation Mechanism of the UWB Antennas (31)3.3Link Budget for UWB System Taking into Account the UWB Antennas (32)3.4Short Range Analysis of UWB Antennas (37)3.5Summary (40)Problems (40)References (41)Over the past few years Ultra Wideband communication has received much attention.Research and development on UWB communications is gaining momentum mainly because of communication and ranging capabilities of this technology as well as the recognition of significance of UWB technology by the FCC and other regulatory bodies.The major step in the development of UWB technology for wireless communications is the antenna.Like all wireless devices,the antenna is an essential part of UWB communication systems. Due to huge bandwidth of the UWB system,antenna poses a remarkable challenge to the UWB technology.In the recent years researchers,engineers and scientist have tried hard to solve UWB antenna problem in different ways and now,six years after the FCC authorized commercial UWB systems,the UWB products are entering the market with a large scale of commercialization.Generally antennas are elements that radiate the electromagnetic energy of a transmission line to the free space.Antennas are in fact transition devices (transducers)between guided wave and free space(and vice versa),[1].They can be considered as impedance transformers,coupling between an input or line impedance and the impedance of free space[2].For the case of the UWB this impedance transformation of antenna is more important.This is due to huge bandwidth of UWB system.As an initial approach to the UWB antennas we can start from a dipole and consequently consider multi-narrowband anten-nas which are optimized to work in the entire UWB band.This idea is shown in Fig.3.1together with the antenna’s corresponding dispersive waveform.The large scale components of this log-periodic antenna radiate the low frequency components and the smaller scale components of the antenna radiate high H.Nikookar,R.Prasad,Introduction to Ultra Wideband for Wireless29 Communications,Signals and Communication Technology,DOI10.1007/978-1-4020-6633-7_3,ÓSpringer ScienceþBusiness Media B.V.2009frequency components.For the UWB communications the dispersive behavior of the antenna waveform is not popular.Another disadvantage of this antenna is at different azimuth angles around the antenna the waveform varies,which is again unpopular for wireless communication applications.There are different types of UWB antennas.As described in more detail in [3]they are categorized into the following classes according to form and function: Frequency dependent antennas:The log-periodic antenna is an example of this type of antennas where the smaller scale geometry of antenna contri-butes to higher frequencies and the larger scale part contributes to the lower frequencies. Small-element antennas:These are small,omni-directional antennas for commercial applications.Examples of this type of antennas are bow-tie or diamond dipole antennas. Horn antennas:Horn antennas are electromagnetic funnels that concentrate energy in a specific direction.These antennas have large gains and narrow beams.The Horn antennas are bulkier than small-element antennas. Reflector antenna:These antennas are high gain antennas that radiate energy in a particular direction.They are relatively large but easy to adjust by manipulating the antenna feed.Hertz’s parabolic cylinder reflector is an example of this type of antennas.Reference [3]is an excellent book with a comprehensive treatment of UWB antennas.The aim of this chapter is to provide a brief introduction to the application of UWB antennas especially for wireless communications.To this end,first in Section 3.1we start with explaining the requirements of the UWB antennas when they come to wireless communication applications.The radia-tion mechanism of the UWB antennas is explained in Section 3.2.Since design of a UWB communication system requires a good understanding of the link budget for determining the coverage of the communication system,in–0.8–0.6–0.4–0.20.20.40.60.81TimeA m p l i t u d e Fig.3.1A log-periodic antenna (left )which has a dispersive waveform (right )303UWB Antennas3.2Radiation Mechanism of the UWB Antennas31 Section3.3a link budget for UWB system,taking into account the character-istics of the UWB antennas,is provided.Furthermore,as UWB is a proper technology for the short range high-speed communications,and in short range scenarios the UWB transmit and receive antennas are very close to each other and the far-field condition,assumed in most of the link budget models,may not be satisfied,in Section3.4a short range analysis of UWB antennas is discussed.3.1Antenna RequirementsThe major challenge in the transmission of narrowband pulses is the antenna. Unlike the narrowband sinusoidal regime,the radiation of large bandwidth, non-sinusoidal waveforms is an active field of research in the antenna domain. In this section we study the major requirement of antennas for UWB wireless communications.As discussed in Chapter2,the UWB bandwidth spans from3.1to10.6GHz. This huge bandwidth poses challenges on the antennas of the UWB system.The antenna’s characteristic should be flat in this frequency range.The UWB antennas for wireless communications applications should have omni-direc-tional radiation pattern.They should radiate the pulse with minimal distortion and minimal late-time ringing[4].They should also be integrated with the generator on a chip.UWB antennas should be mounted on a dielectric substrate which will also serve as a protective mechanical shield and radiate through it. Other major constraint is the FCC mask.In fact the antenna designer and the RF engineer should cooperate to ensure the overall UWB communication device to meet a desired spectral mask[2].Other requirement of UWB antennas for wireless communications emanates from the spectrum sharing of the UWB and the existence of other narrowband services.The wireless communications UWB antennas should be able to be modified by introducing notches or filtering to some frequencies occupied by the narrow and wideband services.Another requirement is the integration of UWB antenna with the UWB device.UWB antenna for wireless communications should be an integral part of the system and not a stand-alone element.This is an important issue in the successful implemen-tation of UWB technology for wireless communication applications.3.2Radiation Mechanism of the UWB AntennasWireless systems based on impulse radio use a new temporal dimension not classically considered in antenna theory and well-known frequency domain parameters are not sufficient for the characterization of transient radiation behavior.In the UWB measurements,the pulse generator is connected to the UWB antenna.As the antenna is often not perfectly matched at low frequen-cies,when the transmitted pulse arrives at the transmit antenna,not all theenergy is transmitted.This consequently means that a part of the signal is reflected.This reflected pulse travels back through the cable to the generator. Because the generator is short circuited after firing the pulse,this reflected pulse is then reflected back to the antenna and is partially transmitted into the channel and the process repeats.Therefore,the pulse bounces between the UWB gen-erator and UWB transmit antenna.This phenomena is known as‘‘multiple signal reflection’’in the UWB antenna measurements[5].There are several solutions to this problem.A standard solution is to use a wideband resistive attenuator between generator and transmit antenna to attenuate reflections at the price of range reduction due to loss of transmit power.Another solution to this problem is the use of an isolator or circulator.However,these elements should operate over a large bandwidth.In the measurements,a practical solution to this problem is to use a longer cable between the UWB generator and transmit antenna.The length of the cable determines the total time window that can be measured in the UWB measurements.3.3Link Budget for UWB System Taking into Accountthe UWB AntennasDesign of a UWB communication system requires a good understanding of the link budget for determining the coverage of the system.Indeed several results have been reported on the UWB channel measurements and modeling and accordingly,models for UWB path loss have been proposed[6]–[9].However, none of these references has investigated the link budget of UWB transmission when taking into account the characteristic of UWB antennas.In this section we study a link budget model for a UWB system considering the characteristics of the transmit and receive antennas as well as the generator and pulse shape of the UWB system.The electric field radiated by the transmit antenna E rad can be expressed as[10]E radðfÞ¼jV gðfÞ 0Z gðfÞþZ T AðfÞF0eÀj R4p R(3:1)Where V g is the generator output voltage and Z g and Z TA are the impedance ofthe generator,and the transmit antenna,respectively.The following parameters are used:f is the frequency, =2p/l is the free space wave number,where l is the wavelength, 0=120p is the free space impedance,F0is the antenna field factor and R is the distance.If the transmit and receive antennas are assumed to be identical,then the field factor can be expressed as[11]F0¼ 0H e(3:2) 323UWB AntennasWhere H e is the effective height of the antenna.The open circuit voltage induced at the receive antenna output is proportional to the incident electric field E inc and the effective height of the antenna.Assuming E inc=E rad,the voltage at the load,i.e.,V L can be expressed as(see Fig.3.2)V LðfÞ¼I LðfÞZ LðfÞ¼E inc H eZ LZAþZ LðfÞ(3:3)Where I L is the current through the load,Z RA and Z L are the impedance of thereceive antenna and load,respectively.Inserting(3.1)and(3.2)in(3.3)yields:V LðfÞ¼j H2e 0eÀj R4p RZ LðfÞZ RAþZ LðfÞÀÁZ TAþZ gðfÞÀÁV gðfÞ(3:4)According to(3.4),the voltage at the load can be determined if the parameter H e is known as other parameters are known from the design.From(3.4)the received power spectral density can be found:P rðfÞ¼P tðfÞ 2H4e 201ð4p RÞ2Z LðfÞZ gðfÞZ RAþZ LðfÞ2Z TAþZ gðfÞ2(3:5)WhereP tðfÞ¼12V gðfÞ2Z gðfÞ(3:6)(a)(b) (c) V g(f Z L(f)Z L(f)I(f)RZ g(f)V g(fFig.3.2Illustration of(a)antenna system,(b)transmit equivalent circuit and(c)receiveequivalent circuit3.3Link Budget for UWB System Taking into Account the UWB Antennas33andP rðfÞ¼12V LðfÞj j2Z LðfÞj j(3:7)are the transmit and receive power spectral densities,respectively.The effective antenna height can be expressed in terms of the antenna gain and its input impedance as:H4e ¼Z RAþZ LðfÞ2Z TAþZ gðfÞ2Z LðfÞZ gðfÞ!44pG tðfÞG rðfÞ(3:8)Where G t(f)and G r(f)are the transmit and receive antenna gain,respectively. Substituting(3.8)in(3.4)we get the following expression for the link budget based on signal amplitudes:V LðfÞ¼c4pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiG tðfÞG rðfÞpfV gðfÞ!1R(3:9)Where c is the speed of light.According to(3.9)the link budget expression is based on the received voltage rather than the received power.Such an approach is more appropriate for a system working in the time domain.Calculation of link budget based on peak voltage can avoid the noise level problem which is caused by averaging the signal over a small time window[12].Using the above-mentioned analysis,for a transmitted pulse of200ps half-pulse width(i.e.,pulse width at half of the maximum amplitude),providing a spectrum of about6GHz,and2set of omni-directional bi-conical UWB antennas(antenna set1with diameter of16cm and set2with diameter of 7.5cm)and with antenna height of1.5m,the maximum received voltage as a function of separation distance between transmitter and receiver is shown in Fig.3.3,[12].From this figure it can be observed that the received voltage decreases inversely with the separation distance between antennas.The simula-tion results based on(3.9)show a good match with the measurements as discussed in detail in[12].Moreover,the received voltage with antenna set1is much higher than the case when antenna set2is used.This is because antenna set1radiates more energy than antenna set2at low frequencies where the major part of the pulse energy is concentrated.From(3.9)the effect of generator waveform on the link budget is also clear. Figures3.4and3.5show the rectangular,Gaussian and mono cycle pulse in time and frequency domain,respectively.The results of the above discussed analysis of link budget for the antenna set2are illustrated in Fig.3.6.From this 343UWB Antennasfigure it is obvious that the received voltage for the monocycle pulse is higher than the rectangular and the Gaussian pulses.This is mainly because,unlike other considered waveforms,the monocycle pulse has almost no DC compo-nent and the main energy occurs at higher frequencies where the antennas performbetter.Fig.3.4Different shapes of the generator output with equal total energy,[12]Fig.3.3Received peak-to-peak voltage as a function of distance using 2sets of biconical UWB antennas,[12]3.3Link Budget for UWB System Taking into Account the UWB Antennas 35363UWB Antennas[12]Fig.3.5Spectra of the pulses, Array Fig.3.6Receive peak-to-peak voltage as a function of distance between transmitter and receiver using different pulse shapes,[12]3.4Short Range Analysis of UWB AntennasUWB is a proper technology for short range high speed communications. Major application area is the Wireless Personal Area Networks(WPAN)or Wireless Body Area Networks(WBAN).In these applications the transmit and receive antennas are very close to each other and far-field condition,assumed in most of the link budget models,may not be satisfied.In the far-field,the plane wave propagation and a constant ratio between electric and magnetic field given by the wave impedance,is assumed.However,in the near field region, different effects such as reactive fields,phase errors and even re-radiation between the antennas may become important.Different near field criteria have been established based on different effects that can appear in this region[10].In this section these effects,among others, are analyzed with respect to the received power over a large frequency band.3.4.1Phase ErrorThe near field criterion associated to phase error is restricted to the fact that an incident spherical wave differs from a plane wave in a given fraction of the wavelength.When transmit and receive antennas are close to each other,the rays of the spherical wave produced by transmit antenna reach different parts of the receive antenna aperture with different phases.This affects the receive power as the rays do not sum coherently at the receive antenna.The phase of each ray is a function of distance between the antennas,the frequency and the antenna dimension.This effect causes variations in the received power as a function of distance between the antennas and the frequency and may cause distortion in the received signal.For the sake of simplicity,and without loss of generality,we consider a dipole antenna with full matching.We analyze the case of two thin diploes(i.e.,transmit and receive)as depicted in Fig.3.7,[13].The voltage V rx at the terminals of the receive dipole can be expressed as[10]:V rx11I rxiZ l=2Àl=2E rzðz rxÞI rxðz rxÞd z rx(3:10)Where I rxi is the current at the feed point of the receive antenna,I rx is the current illumination of the receive dipole,z rx and z tx are positions along the receive and transmit dipole,respectively,and l is the length of the dipole.The electric field along the receive dipole is given by:E rzðz rxÞ¼Z l=2Àl=2E ðz tx;z rxÞcos ðz tx;z rxÞd z txþZ l=2Àl=2E rðz tx;z rxÞcosp2À ðz tx;z rxÞh id z tx(3:11)Using the equations of the infinitesimal dipole given in[10]3.4Short Range Analysis of UWB Antennas37E r ¼ I 0l cos 2p r 1þ1jkre Àjkr(3:12)E ¼j I 0l sin 4p r 1þ1jkr À1ðkr Þ !e Àjkr(3:13)The voltage in the receive antenna can be expressed as:V rx 11I rx i Z l =2Àl =2R l =2Àl =2j kI ðz tx Þl sin ðz tx ;z rx Þ4p r ðz tx ;z rx Þ1þ1jkr ðz tx ;z rx ÞÀ1ðkr ðz tx ;z rx ÞÞ2 Àjkr ðz tx ;z rx Þcos ðz tx ;z rx Þd z tx þR l =2Àl =2 I ðz tx Þl cos ðz tx ;z rx Þ2p r ðz tx ;z rxÞ21þ1jkr ðz tx ;z rx Þ e Àjkr ðz tx ;z rx Þcos ½p 2Àcos ðz tx ;z rx Þ d z tx 0B @1C A I rx ðz rx Þdz rx(3:14)Where k is the wave number (2p /l ),I 0is the excitation current, is the free space impedance (120p ), is the elevation angle with respect to the axis of the dipole assumed along to zenith,j is the azimuth angle with respect to the x -axis in a rectangular coordinate system with z -axis along the zenith,and r is the distance from the dipole.Equation (3.14)quantitatively shows the near field effects on the received signal voltage.Calculation of received power at very short distances shows that the received power is less than expected for the far-field [13].The main reason is that different rays picked up by the antenna are not in phase and therefore the total received power is less.It should be mentioned that for the UWB antennas in short range wireless communication scenarios,the revived power based on (3.14)should be averaged over the entire UWB band.This means that the results of different dipoles at different center frequencies should be combined.The above-explained analysis can be repeated in a similar manner forthe Fig.3.7Phase error between two dipoles383UWB Antennas3.4Short Range Analysis of UWB Antennas39 non-dispersive UWB antennas(such as diamond antenna*).More details can be found in[13]–[14].3.4.2Antenna MismatchThe electric and magnetic fields for distances within the near-field region have a quite different behavior.They consist of radiating components and receive or storage components.For radiating fields,the source is not affected by the observer.Once the radiating field leaves the antenna,it is gone for ever,and the source is not affected if the energy is absorbed or not.For reactive or stored fields the effect is different.Any time that an observer extracts or diverts part of the reactive field energy,it will cause a reaction in the source circuit which might change the input impedance of the antenna[14].For distances below l/2p the reactive fields predominate.The coupling of the reactive static field to the receive antenna can be modeled as an electric or magnetic coupling and it will influence the transmit antenna by changing its input impedance.This coupling will vary with the frequency.For UWB antennas the changes in the input impedance of the transmit antenna may cause a mismatch for one or several frequencies,and a distortion in the frequency response of the antennas.This effect is analyzed in[14]by using a diamond antenna with a second identical antenna placed at different distances and different frequency bands.Results of this reference show that only for distances of1cm and less a small antenna mismatch occurs.It is also concluded that the mismatching is more important for larger UWB antennas than for smaller antennas.3.4.3Re-radiation Between AntennasThe voltage induced in a receive antenna due to electromagnetic field generated by a transmit antenna produces a current through both the antenna impedance and the load impedance.Part of the power picked up by the antenna will be absorbed by the load impedance and a part of power will be dissipated in the antenna impedance.This might produce a re-radiation from the receive antenna that can be picked up by the transmit antenna and re-radiated again producing interference in the receive antenna.The amount of power re-radiated by the receive antenna depends on the antenna mismatch and the physical antenna structure.For a given distance the re-radiation between the antennas may add constructively or destructively depending on the frequency and the phase shift introduced by both antennas.This effect causes a variation of the received power as a function of frequency.This means that the channel frequency response may change for different distances,not only in level,but also in the *A diamond antenna is a planar antenna formed by two isosceles triangles.The width and the height of the triangle is about!/4of the center frequency.403UWB Antennas shape.Simulation results of the UWB diamond antenna in[14]indicate that at distances of2–3cm the re-radiation effect between antennas are negligible. Furthermore,this effect is smaller for smaller UWB antennas.3.5SummaryThe design and development of antennas for UWB wireless communication is a key research area.The huge bandwidth of UWB systems poses unique research challenges which have to be dexterously addressed.In this chapter a brief introduction to the application of UWB antennas especially for wireless com-munications was provided.ProblemsProblem3.1Consider an AM broadcast antenna working in the frequency range of530-–1800KHz.Calculate the fractional bandwidth of the signal.Can we consider the antenna as an UWB antenna?(Hint:note that the bandwidth of AM signal is10KHz.)Problem3.2As will be discussed in more detail in Chapter7,Impulse radio and Multi-band OFDM are two competent technologies for the UWB communica-tions.Which one of these technologies is more vulnerable to the dispersion of the UWB antenna?Problem3.3What are the major differences between UWB antennas for the radar and wireless communication applications?Problem3.4Consider a linear array of N narrowband antennas which are equally spaced at a distance d.As seen in Fig.P.3.4.1,a plane wave impinges the array at angle q with respect to array normal.Each antenna output is weighted by a complex weight V n.By adding all antenna outputs obtain the array factor(AF)as:Array NormalFig.P.3.4.1A uniformlyspaced linear arrayReferences41X NV n e j2p nd sin qAFðqÞ¼n¼1where l is the wavelength.Sketch the AF for an array of8elements.If the array elements are UWB antennas which are modeled by differentia-tors,what will be the array factor?Sketch the array factor for N=8and compare the result with the narrowband antennas case.Problem3.5In Section3.2we studied the radiation mechanism of the UWB antennas and the multiple reflection problems.Does a longer cable between the UWB generator and transmit antenna eliminate the problem?References1.J.Kraus,Antennas,2nd edition,McGraw Hill,NY,1988.2.F.Nekoogar,Ultra-Wideband Communications,Fundamentals and Applications,Prentice Hall,NJ,2006.3.H.Schantz,The Art and Science of Ultrawideband Antennas,Artech House,Boston,2005.4.A.Yarovy and K.Palmer,‘‘Ultra-wideband Antennas:Foundations,’’Workshop,European Conference on Wireless Technology,Paris2005.5.Z.Irahhauten,G.Janssen,H.Nikookar, A.Yarovoy and L.P.Ligthart,‘‘UWBChannel measurements and results for office and industrial environments,’’IEEE Proc.2006International Conference on Ultra-Wideband,MA,September2006,pp.225–230, ISBN:1-4244-0102-X.6.D.Cassioli,M.Z.Win and A.R.Molisch,‘‘A statistical model for the UWB indoor channel,’’IEEE Vehicular Technology Conference Spring,vol.2,no.53,2001,pp.1159–1163.7.J.Keignart and N.Daniele,‘‘Subnanosecond UWB channel sounding in frequency andtemporal domain,’’IEEE Conference on UWB Systems and Technologies,2002,pp.25–30.8.S.Yano,‘‘Investigating the UWB indoor wireless channel,’’IEEE Vehicular TechnologyConference Spring,vol.3,no.55,2002,pp.1200–1204.9.K.Siwiak and A.Petroff,‘‘A path link model for UWB pulse transmission,’’IEEEVehicular Technology Conference Spring,vol.2,no.53,2001,pp.1173–1175.10.C.A.Balanis,Antenna Theory:Analysis and Design,John Wiley,NY,1997.11.E.K.Muller,Time-Domain Measurements in Electromagnetics,Van Nostrand ReinholdCompany,NY,1986.12.Z.Irahhauten,A.Yarovoy,H.Nikookar,G.Janssen and L.Ligthart,‘‘The effect ofantenna and pulse waveform on the link budget of ultra wide band impulse radio transmission,’’European Conference on Wireless Technology,October2004, pp.261–264,Amsterdam.13.Z.Irahhauten,J.Dacuna,G.Janssen and H.Nikookar,‘‘A link budget model forUWB-WPAN applications,’’European Conference Wireless Technology,September 2006,Manchester,UK,pp.95–95–98.14.Z.Irahhauten et al.,‘‘Link budget analysis and modeling for short-range UWB channels,’’Submitted to IEEE Transactions on Antenna Propagation,December2007.。
UWB Antenna for Wireless Communication andDetection ApplicationsAhmed A. KishkECE DepartmentConcordia UniversityMontreal, Canada kishk@encs.concordia.caXuan Hui Wu K. S. RyuGeneral Dynamics SATCOM Technologies, USA LG Electronics Inc., South Korea xuanhui.wu@ seungwoo.ryu@Abstract—Several ultrawide band (UWB, 3.1-10.6 GHz) antennas are presented for eith er wireless communications or detection applications. An UWB antenna could be either a planer structure for portable devices or has a 3D configuration, which is suitable for an access point. Dielectric resonator is used to tremendously shrink an UWB antenna’s size, which is important for a terminal device. Different DR loading schemes of a planer UWB antenna is discussed. Th e application of such a DR UWB antenna in breast cancer detection is also investigated. For wireless communication, antenna tec niques to reject t e interferences from WLAN bands are presented for printed UWB antennas. Lastly, an omnidirectional UWB antenna with a non-planer structure is presented for an UWB access point.Keywords-Band-notch antenna, DRA, sensors, UWB antenna.I.I NTRODUCTIONRecently, many UWB antennas have been proposed [1-6] since the Federal Communication Commission (FCC) allowed 3.1-10.6 GH z unlicensed band for UWB communications or detection. Challenges of the feasible UWB antenna design include the UWB performance issues of the sufficient impedance matching bandwidth, high radiation efficiency, a stable gain versus frequency response, constant group delay or linear phase. Moreover, specific application of the UWB technology has its own requirement. For example, a portable device requires a compact antenna, a wireless communication system requires the interference rejection capability due to nearby communication band, a centralized access point requires an omnidirectional radiation pattern and a high resolution detection system requires an antenna with minimum time-domain distortion [1]. Lots of efforts have been performed to improve the performance of the UWB antenna for different applications [2-4].This paper presents several UWB antennas either for wireless communications or detection applications. First, compact UWB antenna design using dielectric resonators is presented for portable devices. Second, a band-notched UWB antenna design is given, which could be applied to reject the strong interferences from WLAN band. Lastly, an UWB monopole antenna with omnidirectional radiation characteristics is provided for an access point that covers the full 360 degrees range .(a) (b) (c)Fig. 1.Geometry of the proposed inserted UWB DRA excited by CPW feeding (a) Top view (b) Isometric view (c) Side viewII.UWB D IELECTRIC RESONATOR A NTENNACONFIGURATIONThe dielectric resonator antenna (DRA) is one of the attractive candidate antennas for UWB application due to several striking characteristics such as high radiation efficiency, low dissipation loss, light weight, and small size. Significant efforts for the DRA have been reported to achieve wide bandwidth enhancements over the past two decades [10–17].An inserted DRA excited by CPW is shown in Fig. 1. The size of the DRA has 12 mm width, 13 mm length, and 5.08 mm thickness with a dielectric constant of 10.2, and it is supported by a 15 × 33 mm2RT6002 substrate with a dielectric constant of 2.94 and a substrate thickness of 0.762 mm. The antenna parameters are shown in Fig. 1 with G1= 0.15 mm, G2= 0.45 mm, G3= 2 mm, F1= 6 mm, F2= 7 mm, W1= 2.16 mm, L1= 8.5 mm, T1= 2.54 mm, and T2= 1.778 mm. Figure 2 shows the reflection coefficients of the antenna with different strip widths (F1) with the DR and without the DR.The UWB DRA uses two modes so that mainly the lower band is contributed by dielectric resonator itself and the upper band is affected by the rectangular wide strip. It can be observed that the reflection coefficients of the metallic element alone do not have significant differences, while the reflectionG1G23F12LZsideFig. 2.Reflection coefficients of the UWB DRA with/without dielectric resonator when strip width (F 1) is (a) 2.16 mm (b) 4.0 mm (c) 6.0 mm.coefficients with dielectric resonator have significant difference around 8 GHz. When the strip width is narrow, the strip acts as a resonator providing a band-notch, so that a high quality factor (Q) of around 20 is obtained. H owever, the wide strip width provides lower quality factor around 2, which implies that the wide strip does not act as a resonator. This technique is the vital to improve the impedance matching bandwidth comparedwith previous planar type broadband monopole DRAs [10,11].Fig. 3.The photo of inserted DRA excited by CPW feeding.Fig. 4.Measured and simulated reflection coefficients.Fig.3 shows the photo of the inserted DRA excited by CPW feeding. The measurements are performed using the H P8510c network analyzer. Fig.4 shows the simulated and measured reflection coefficients of the proposed antenna. 10 dB return loss is from 3.07 GHz to 11.5 GHz in simulation and from 3.25 GHz to 10.82 GHz in measurement. Fig.5 shows the simulated radiation efficiency with the gain of the antenna versus frequency for the proposed DRA. The antenna achieves higher than 96.5% radiation efficiency within the operating frequency band. The far field radiation patterns of the proposed inserted DRA excited by CPW feeding are also measured. Fig.6 plots the measured radiation patterns at fourFig. 5.Radiation efficiency and gain versus frequency.different frequencies (3.1, 5, 8, and 10GHz). We can see the good omni-directional radiation patterns with low cross polarization level.A different design is shown in Fig. 7, where the inserted DR has two open tunnels. Fig. 8 shows the simulated and measured matching frequency band of the proposed antenna for -10 dB reflection coefficient from 3.53 GHz to 9.675 GHz with a bandwidth of 93% in simulation and the frequency band of 3.685 GH z to 9.96 GH z with a bandwidth of 92 % in measurement. It can also be noticed that the reflectioncoefficient for -15dB level provides a bandwidth of about 77%.(a)(b)(c)Fig. 6.Measured radiation patterns, H plane (left) E plane (right) at (a) 3.1 GHz (b) 5 GHz (c) 10 GHz .Fig. 7.A DRA with two open tunnels.The far field radiation patterns of the present DRA are also measured and verified with the simulated results. Fig. 9 plots the simulated and measured radiation patterns at three different frequencies (4 GH z, 6.5 GH z, and 9 GH z). The antenna radiates in a broadside direction. We can observe the good agreement between the computed and measured radiation patterns. Also we can see the good symmetry of the radiation patterns along the broadside direction.Frequency (GHz)R e f l e c t i o n c o e f f i c i e n t (d B )Fig. 8.Measured and simulated impedance matching bandwidth.(a)(b)(c ) (d)(e)(f)Fig. 9.Measured and simulated E plane (left) radiation patterns and H plane (right) radiation patterns (a) at 4 GH z (b) 6.5 GH z (c) 9 GH z; -Co-polarization for simulation; --Cross-polarization for simulation; -. Co-polarization for measurement; Cross-polarization for measurement.(a)(b)Fig. 10.Geometry of the DR sensor (a) front view (b) isometric view.Fig. 10 gives an H -shape inserted DR antenna. It is designed to conduct breast cancer detection. The main advantages of the DRA over the other type of sensors for the breast tumor detection is not only its compact size and the high efficiency, but also the ability to use it without a need for matching medium because of the DR characteristics. Most of the metallic-type sensors are required to be immersed into a matching medium with permittivity, which is varied from 3 to 36 for reducing the reflection between free space and breast. A lot of additional work is required to implement the matching medium to surround the patient’s breast, and it causes inconvenience for the patients. However, the DRA in Fig. 10 is with a dielectric constant of 10.2, which is similar to the permittivity of the fatty tissue. Therefore, it does not need matching medium for reducing the reflection between free space and breast.The DRA mounted on a vertical ground plane edge is a very good candidate for the breast tumor detection, considering its constant gain, and high antenna (total) efficiency, which are two of the requirements of the sensor for the breast tumor detection. To show the suitability of the compact DR sensor for the breast tumor detection, we provide not only frequency domain analysis but also time domain analysis.As shown in Fig. 11, the simulated and measured matching frequency bands of the proposed antenna for -10 dB reflection coefficients are from 3.5 GHz to 9.9 GHz with a bandwidth of 96% in simulation and from 3.8 GH z to 10.8 GH z with a bandwidth of 96% in measurement. The standard deviation of the group delay within the operating frequency band is only 0.14 ns in simulation and 0.18 ns in measurement. Fig. 11(c) shows the simulated and measured gain of the DR sensor. It is generally known that constant gain is also one of the important factors for the pulse-preserving performance. The standard deviation of the gain within the operating frequency band is only 0.44 dBi in simulation and 0.5 dBi in measurement.III BAND-NOTCHED UWB ANTENNATo prevent interference problems due to existing nearby communication systems within the ultra-wideband operating frequency band, the significance of an efficient band-notched design is noticed. H ere, the band-notches are realized by adding independent controllable strips in terms of the notch frequency and the width of the band-notches to the fork shape of the UWB antenna. The size of the flat type band-notchedW 1W L 12Frequency (GHz)R e f l e c t i o n c o e f f i c i e n t (d B)(a)Frequency (GHz)T i m e (n s e c )(b)Frequency (GHz)G a i n (d B i )(c)Fig. 11.Measured and simulated (a) reflection coefficient (b) group delay (c) gain.UWB antenna is etched on 24x36 mm2 substrate. Two novel antennas are presented. One antenna is designed for one band-notch with single separated strip to cover the 5.15-5.825 GHz band. The second antenna is designed for dual band-notches using two separated strips to cover the 5.15-5.35 GHz band and 5.725-5.825 GHz band.Fig. 12 shows the photo of two UWB antennas, one with a single wide band-notch and the other one with two band-notches. For the first one, the position of the strip is 8 mm y-direction shift with 9.75x14 mm2 separated strip size. For the dual band-notch case, one strip is 18.2 mm long with 4 mm shifting to the negative x-direction, and the other strip is 16.45 mm long with 1.1875 mm shifting to the positive x-direction. Fig. 13 shows the measured and simulated VSWR versus frequency of the proposed antenna with one separated strip, which is wide band-notch case. This antenna covers the frequency from the 3.0 GHz to at least 12 GHz, and shows very good rejected frequency band. The width of the band-notch is from 4.98 to 6.03 GH z in the measurement and from 4.96 to 5.96 GHz in the simulation. It shows very efficient band-notch(a)(b)Fig. 12.Photo of a UWB antenna with (a) single strip for wide band-notch case and (b) dual band-notches.for lower WLAN band and upper WLAN band with expense of the available frequencies between two bands.Fig. 13.Simulated and measured VSWR characteristics for wide case.Fig. 14 shows the measured VSWR versus frequency of the proposed antenna with two separated strips. This dual band-notch UWB antenna could provide sufficiently wide impedance bandwidth (VSWR <2) covering from 3-12 GHz or more with the dual band-notches. Measured dual band-notches cover 5.12-5.59 GHz and 5.7-5.948 GHz.Fig. 14.Simulated and measured VSWR against the frequency.IV NON-PLANAR OMNIDIRECTIONAL UWBANTENNAAn ultrawideband omnidirectional monopole antenna is presented in Fig. 15. It is shaped by symmetrically wrapping a PEC sheet that has two trapezoidal cuts at the bottom corners. The antenna features about 132% impedance bandwidth as shown in Fig. 16 and a stable as well as omnidirectional gain versus frequency response over the UWB band as shown in Fig. 17. The ripples shown in the gain response is due to the diffraction occurs at the ground plane edges, and can be eliminated by resistively loading the ground plane edges as shown in Fig. 18.(a)Unwrapped. (b) Wrapped.(c ) Wrapped antenna above ground plane.Fig. 15.Geometry of the omnidirectional UWB antenna.Fig. 16.Simulated and measured reflection coefficient.Fig. 17.gain for a finite ground plane with R=56.25mm.Fig. 18.Effects of ground plane loading.V CONCLUSIONSSeveral UWB antennas were presented. Dielectric resonators were used to reduce the antenna size, and also successfully to match the human tissue in the breast cancer detection applications, which simplifies the detection system. A technique of introducing tuning strips into the UWB antenna design was presented to realize the band-notches so as to eliminate the strong interferences from WLAN band. Lastly, an omnidirectional UWB monopole was discussed to equip a full 360 degrees access point for UWB wireless communications. The ground plane effects were described and the resistive loading method was introduced to reduce such effects.REFERENCES[1] Z N.Chen, Antennas for Portable Diveces, WILEY 2007.[2] K.S. Ryu and A.A. kishk, "UWB Antenna With Single or Dual Band-Notches for Lower WLAN band and Upper WLAN band," IEEE Trans. on Antennas and Propagations,vol. 57, pp. 3942–3950,2009.[3] W.C. Liu and S.M. Chen,"Ultra-Wideband Printed Fork-shapedMonopole Antenna With a Band-Rejection Characteristic," Microwave Opt. Technol Lett.vol.49, pp.1536–1538, 2007.[4] T. Dissanayake and K. P. Esselle, “Prediction of the Notch Frequency ofSlot Loaded Printed UWB Antennas," IEEE Trans. on Antennas and Propagations,vol.55,pp.3320–3325, 2007.[5] M. Zhang, Y.Z. Yin, J. Ma, Y. Wang, and W.C. Xiao, “A racket-shapedslot UWB antenna coupled with parasitic strips for band-notched application,” Progress In Electromagnetics Research Letters,vol. 16, pp.35–44, 2010.[6] J. N. Cheng, S. M. Deng, C. L. Tsai, and S. S. Bor, "Impedanceimprovement of miniature UWB antenna," Microwave Opt Technol Lett.vol.49, pp.2982–2983, 2007.[7] K. L. Wong,S. W. Su, and C. L. Tang, "Broadband OmnidirectionalMetal-Plate Monopole Antenna," IEEE Trans on Antennas and Propagations,vol.53, pp.581–583, 2005.[8] P.V. Anob, K.P. Ray, and G. Kumar, "Wideband orthogonal squaremonopole antenna with semi-circular base," Proc. IEEE Ant.Prop.. Soc. Int. Symp., vol. 3, pp 294–297, July 2001.[9] X. H. Wu and A. A. Kishk, "Study of an Ultrawideband Omni-directionalRolled Monopole Antenna with Trapezoidal Cuts," IEEE Trans. on Antennas and Propagations , Vol. 56, pp. 259–263, Jan. 2008.[10] M. N. Suma, P. V. Bijumon, M. T. Sebastian, and P. Mohanan, "Acompact hybrid CPW fed planar monopole/dielectric resonator antenna," Journal of the European Ceramic Society , vol.27, pp. 3001–3004, 2007.[11] T. Chang, and J. Kiang, "Broadband DR-Loaded Planar Monopole,"IEEE Antenna and Propagation Society International Symposi m .Honolulu, HI. Jun 2007, pp. 553–556.[12] K. S. Ryu and A. A. Kishk "UWB dielectric resonator antenna mountedon a vertical ground plane edge," IEEE Antenna and Propagation Society International Symposium North Charleston, SC. Jun 2009, pp.1–4.[13] G. P. Junker, A. A. Kishk, A. W. Glisson, and D. Kajfez, "Effect of an airgap on a cylindrical dielectric resonator antennas operating in the TM01 mode," Electronics Letters , vol. 30, pp. 97–98, 1994.[14] A. A. Kishk, "Wideband Dielectric Resonator Antenna in truncatedtetrahedron form excited by a coaxial probe," IEEE Transactions on Antennas and Propagations , Vol. 51, pp. 2907–2912, 2003.[15] A. A. Kishk, B. Ahn, and D. Kajfez, "Broadband stacked dielectricresonator antennas," Electronics Letters , vol. 25, pp. 1232–1233, 1989.[16] M. Lapierre, Y. M. M. Antar, A. Ittipiboon, and A. Petosa,"Ultra-Wideband Monopole/Dielectric Resonator Antenna," IEEE Microwave and Wireless Components Letters, vol. 15, pp.7–9, 2005.[17] K.S. Ryu and A. A. Kishk,"Ultra-Wideband Dielectric Resonatorantenna with Broadside Patterns mounted on a vertical ground plane edge," IEEE Trans.on Antennas and Propagations,vol.58,pp.1047–1053, 2010.。
应用于数字电视系统的双极化Vivaldi天线康晓乐;陈隆耀;李增瑞【摘要】本文提出了一种具有高端口隔离度的双极化正交Vivaldi天线.在没有电流接触的情况下,以十字形交叉的形式将两个Vivaldi天线正交放置来实现双极化天线结构.为了满足低端带宽要求,同时改善低频辐射特性,提出了一种新颖的指数渐变槽边缘(ETSE)结构.两条微带馈线用于实现每个极化端口的独立馈电.测试结果与仿真结果吻合良好.所提出的天线实现了-10dB的回波损耗带宽为470-794MHz,并且在正交方向上显示了稳定的辐射性能.测试显示两个极化之间的隔离度优于25dB,并且在工作频带上的增益在1.57至7.18dBi之间.所提出的天线可以用于数字电视(DTV)系统.【期刊名称】《中国传媒大学学报(自然科学版)》【年(卷),期】2017(024)002【总页数】4页(P15-18)【关键词】双极化Vivaldi天线;指数渐变槽边缘;数字电视应用【作者】康晓乐;陈隆耀;李增瑞【作者单位】中国传媒大学信息工程学院,北京 100024;江西省通信管理局,南昌330000;中国传媒大学信息工程学院,北京 100024【正文语种】中文【中图分类】O441.4DTV广播在过去几年中引起了全世界的关注[1]。
与现代移动通信系统相比,DTV 在多径环境中同样面临着信号衰落问题。
这个现象可以通过应用极化分集来改进。
由于结构简单,重量轻,频带宽,高效率和高增益,在1979年由Gibson设计的Vivaldi天线已被广泛使用[2]。
Vivaldi天线可以组合为十字形双极化天线[3-4],用于超宽带系统。
然而,两个天线的电长度大于本文提出的天线。
波纹边缘结构的提出[5],在不恶化辐射特性的前提下减小了天线尺寸。
与常规槽边缘(RSE)相比,渐变槽边缘结构(TSE)的提出[6]可以依托天线内部渐变结构的形状,从而更好的利用贴片面积。
然而,文中并没有给出渐变槽的具体参数。
Ultra-W ideband Planar Antennas for W ireless Communications翁金輅(Kin-Lu W ong)國立中山大學電機系Dept. of Electrical Engineering National Sun Yat-Sen UniversityKaohsiung, Taiw anE-mail: w ongkl@.twOperating Systems andUW B Planar Antennasn UW B, short-range communications,3.1-10.6 GHz n Systems w ith BW > 1.5 GHz or > 25%n802.16a [fixed w ireless (50 kM), W iM ax,w ireless metropolitan area netw ork, 2-11 GHz]n UW B access-point (AP) antennasn Planar metal-plate monopole antennasn Printed monopole antennasn UW B antennas for mobile unitsn UW B mobile phone antennas (internal or stubbymonopole)n UW B internal laptop antennasUW B AP Antennas-Planar metal-plate monopoles (1)2:1 VSW R BW larger than 10 GHz (covering 3.1UW B AP Antennas-Planar metal-plate monopoles (2)Considerations of UW B radiation characteristics:(1) Vertical polarization purity (suppressing horizontal currents)UW B/802.16a AP Antenna -Square planar monopole w ith notches (1)BW : 10.7 GHz (2.0~12.7 GHz), 10 dB RL-30-20UW B/802.16a AP Antenna-Square planar monopole w ith notches (2)Unmarked curves: MeasuredMarked curves: SimulatedUW B/802.16a AP Antenna-Square planar monopole w ith notches (3)Unmarked curves: MeasuredMarked curves: SimulatedUW B/802.16a AP Antenna-Square planar monopole w ith notches (4)Unmarked curves: MeasuredMarked curves: SimulatedSquare planar monopole w ithtrident-shaped feeding strip (1)BW : 10 GHz (1.4~11.4 GHz), 10 dB RLImproved BW and polarization purity6E+0099E+009 1.2E+010-30-20Square planar monopole w ithtrident-shaped feeding strip (2)Measured radiation patterns at 2 and 6 GHzNSYSU, Taiwan UW B AP Antenna-Square planar monopole w ithtrident-shaped feeding strip (3)Measured radiation patterns at 10 GHzGain: 4-7 dBi across the bandUW B AP Antenna -Step-shaped planar monopole (1)BW : 4.4 GHz (2.2~6.6 GHz), 2:1 VSW R2E+0093E+0094E+0095E+009-30-20-10UW B AP Antenna-Step-shaped planar monopole (2)Good omni pattern across the bandMeasured radiation patterns at 3 and 6 GHzUW B AP Antenna-Step-shaped planar monopole (3) 3E+009-30-20UW B AP Antenna-Step-shaped planar monopole (4)Effect of R (= 2W1/W2) on radiation patternSimulated patterns, f = 6 GHz,2W1+ W2= 20 mmUW B AP Antenna-U-shaped planar monopole (1)UW B AP Antenna -U-shaped planar monopole (2)Good omni pattern across the bandMeasured radiation patterns at 3 and 6 GHzUW B AP Antenna -U-shaped planar monopole (3)UW B AP Antenna-Band-notched UWB planar monopole (1)BW covering 3.1 ~ 10.6 GHz w ith anotched frequency band at 5 GHzBy incorporating a suitable (slot or slit) structure to be a half-w avelength at the desired notched frequency, a destructive interference could take place, causing the UW B antenna non-responsive at that frequency --Band-notched characteristic1E+010 1.2E+0101020UW B AP Antenna-Band-notched UW B planar monopole (2)Slot length = 2L + W -2tL = 11 mm, W = 9 mm, t = 2 mmSlot length = 27 mm ~ 0.5λat 5.5 GHzUW B AP Antenna-Band-notched UW B planar monopole (3)Measured radiation patterns at 4 and 8 GHzEffect of U-slot on the radiation patterns atfrequencies out of the notched frequencyband is very slightUW B Printed Antenna-Diversity printed monopolesBW: 5.4 GHz (2.3–7.7 GHz), 10 dB RL;Good port isolation (S21< –20 dB)across the band;Gain: about 3.5 dBi in 2.4/5.2/5.8 GHzbands5E+0096E+0097E+0098E+009UW B antennas for mobile unitsn UW B mobile phone antennas (internal or stubby monopoles)n UW B internal laptop antennasUW B M obile Phone Antenna-Internal metal-plate monopole (1)BW: 6 GHz (1.9~7.9 GHz), 10 dB RLUW B M obile Phone Antenna-Internal metal-plate monopole (2)Measured radiation patterns at 2045 and2442 MHzUW B M obile Phone Antenna-Internal metal-plate monopole (3)Measured radiation patterns at 5500 MHzGain: 2.3-4.2 dBi across the bandUW B M obile Phone Antenna-Stubby cylindrical monopole (1)Antenna comprises an upper hollow conducting cylinderand a low er conducting conePatentpendingUW B M obile Phone Antenna-Stubby cylindrical monopole (2)UW B M obile Phone Antenna-Stubby cylindrical monopole (3)UW B Laptop Antenna-Planar metal-plate monopole (1)BW: 4.5 GHz (1.89~6.45 GHz), 10 dB RLUW B Laptop Antenna-Planar metal-plate monopole (2)Measured radiation patterns at 2442 and5500 MHzConclusionn UW B planar antennas for access-points and mobile-units applications have been presentedn Planar antennas are good candidates for UW B communication applications。