实验三 刚性转子动平衡测试与分析
- 格式:pdf
- 大小:180.96 KB
- 文档页数:8

带传动-刚性转子动平衡实验报告
实验目的:
1. 学习带传动轴系的刚度分析和动平衡方法,了解带传动轴系的动力特性。
2. 学习刚性转子的动平衡方法,掌握动平衡实验的基本操作技能。
3. 掌握利用矢量和相位检测法进行自行检验的方法。
实验仪器:
1. 带传动轴系、刚性转子动平衡实验装置
2. 震动传感器、信号放大器、矢量和相位检测仪
3. 电子数字秤
实验步骤:
1. 用电子数字秤校正刚性转子上的试重质量,并在刚性转子上安装试重。
2. 将带传动轴系和刚性转子安装到实验装置上,并连接震动传感器。
3. 启动实验装置,记录实验数据。
记录包括震动传感器探头的
输出电压值、带传动轴系中心轴的旋转速度、电源电压等数据。
4. 在不同转速下重复步骤3,直至所有转速的实验数据都被记录。
5. 利用所记录的数据进行数据处理,根据动平衡理论计算出刚性转子的偏心量、倾角和校正质量。
6. 利用矢量和相位检测法对刚性转子进行自行检验,确认实验结果的准确性。
实验结果:
根据实验数据和动平衡理论计算得到,刚性转子的偏心量为
0.02mm,倾角为0.01°。
校正质量为0.03g。
利用矢量和相位检测法进行自行检验,结果表明实验结果的误差较小,证明实验结果的准确性。
结论:
本次实验成功地利用带传动轴系和刚性转子动平衡实验装置进行了刚性转子的动平衡实验,并采用矢量和相位检测法进行了自行检验,得到了准确的实验结果。
实验过程中,需要仔细操作,准确记录数据,严格按照实验步骤操作,才能得到可靠的实验结果。
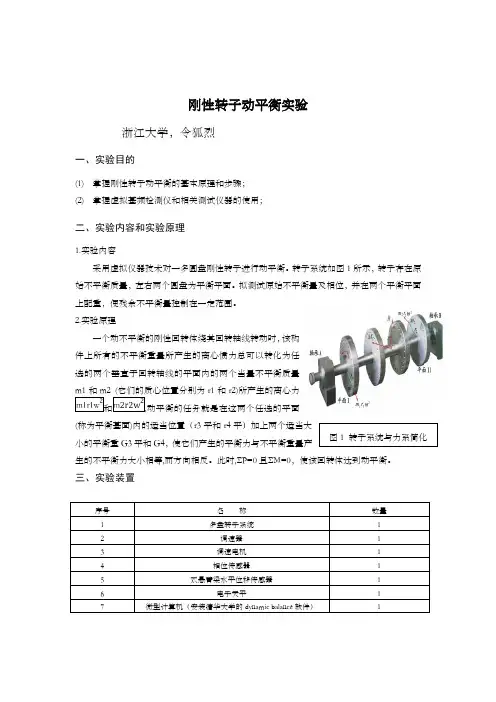
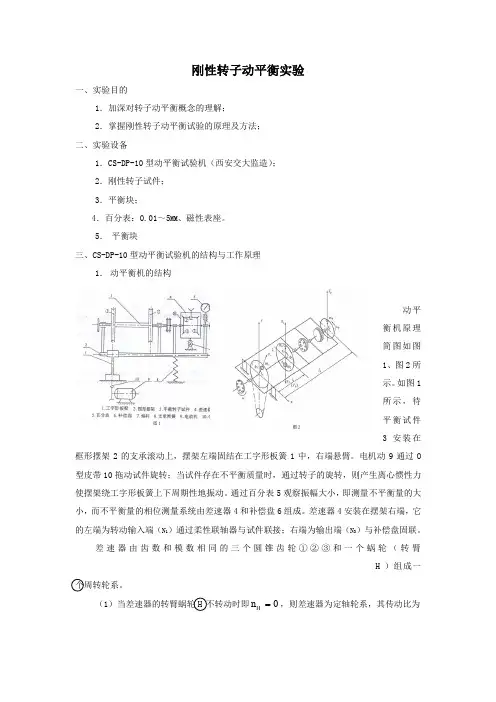
图 1 转子系统与力系简化刚性转子动平衡实验浙江大学,令狐烈一、实验目的(1) 掌握刚性转子动平衡的基本原理和步骤; (2) 掌握虚拟基频检测仪和相关测试仪器的使用;二、实验内容和实验原理1.实验内容采用虚拟仪器技术对一多圆盘刚性转子进行动平衡。
转子系统如图1所示,转子存在原始不平衡质量,左右两个圆盘为平衡平面。
拟测试原始不平衡量及相位,并在两个平衡平面上配重,便残余不平衡量控制在一定范围。
2.实验原理一个动不平衡的刚性回转体绕其回转轴线转动时,该构件上所有的不平衡重量所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡质量r1和r2)所产生的离心力和动平衡的任务就是在这两个任选的平面(称为平衡基面)内的适当位置(r3平和r4平)加上两个适当大小的平衡重G3平和G4,使它们产生的平衡力与不平衡重量产生的不平衡力大小相等,而方向相反。
此时,ΣP=0且ΣM=0,使该回转体达到动平衡。
三、实验装置 序号 名 称 数量 1 多盘转子系统1 2 调速器 1 3 调速电机 1 4 相位传感器 1 5 双悬臂梁水平位移传感器1 6 电子天平1 7微型计算机(安装清华大学的dynamic balance 软件)1四、实验步骤1. 虚拟仪器接线进入“刚性转子动平衡”程序,点击“设备模拟连接”图标,按图3示用鼠标左键连接虚拟测试仪器,如连线错误,用鼠标左键单击“重新连接”按钮。
确认无误后,用鼠标左键单击“连接完毕”按钮,如果出现“连接错误”的提示,则连接有错,需要按“确定”,再按“重新连接”。
如果出现“连接正确”的提示,按“确定”后,可获得与图4相同的虚拟动平衡仪应用程序界面。
2. 原始不平衡量测试(1) 将转速控制器转速b n 设定为1200r/min ,启动转子2至3分钟使转速保持稳定。
(2) 点击“基频检测”图标,进入图4的状态下,用鼠标左键按下左上角按钮“开始”启动虚拟动平衡仪,点击“A 通道”、“B 通道”进行通道切换。
2.5 刚性转子的动平衡实验2.5.1 实验目的由于制造误差、转子内部物质分布的不均匀性,刚性转子的转动轴线不一定位于中心惯性主轴上,因而在两端支撑的轴承上产生附加的动压力,为了消除附加的动压力,需要找到刚性转子上不平衡质量的大小、位置与方位,寻找刚性转子上不平衡质量的大小、位置与方位是动平衡实验的目的。
同时,了解动平衡试验机的组成、工作原理与转子不平衡质量的校正方法,通过参数化与可视化的方法,观察刚性转子动平衡虚拟实验的平衡效果。
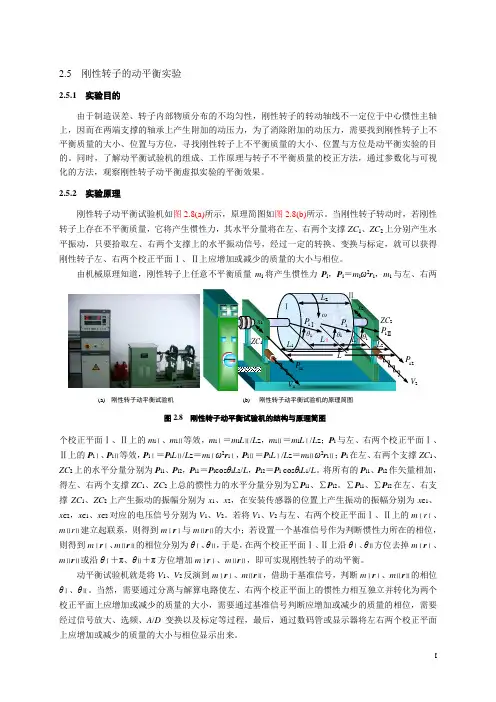
2.5.2 实验原理刚性转子动平衡试验机如图2.8(a)所示,原理简图如图2.8(b)所示。
当刚性转子转动时,若刚性转子上存在不平衡质量,它将产生惯性力,其水平分量将在左、右两个支撑ZC 1、ZC 2上分别产生水平振动,只要拾取左、右两个支撑上的水平振动信号,经过一定的转换、变换与标定,就可以获得刚性转子左、右两个校正平面Ⅰ、Ⅱ上应增加或减少的质量的大小与相位。
由机械原理知道,刚性转子上任意不平衡质量m i 将产生惯性力P i ,P i =m i ω2r i ,m i 与左、右两个校正平面Ⅰ、Ⅱ上的m i Ⅰ、m i Ⅱ等效,m i Ⅰ=m i L Ⅱ/L Z ,m i Ⅱ=m i L Ⅰ/L Z ;P i 与左、右两个校正平面Ⅰ、Ⅱ上的P i Ⅰ、P i Ⅱ等效,P i Ⅰ=P i L Ⅱ/L Z =m i Ⅰω2r i Ⅰ,P i Ⅱ=P i L Ⅰ/L Z =m i Ⅱω2r i Ⅱ;P i 在左、右两个支撑ZC 1、ZC 2上的水平分量分别为P i1、P i2,P i1=P i cos θi L 2/L ,P i2=P i cos θi L 1/L 。
将所有的P i1、P i2作矢量相加,得左、右两个支撑ZC 1、ZC 2上总的惯性力的水平分量分别为∑P i1、∑P i2。
∑P i1、∑P i2在左、右支撑ZC 1、ZC 2上产生振动的振幅分别为x 1、x 2,在安装传感器的位置上产生振动的振幅分别为x C1、x C2,x C1、x C2对应的电压信号分别为V 1、V 2。
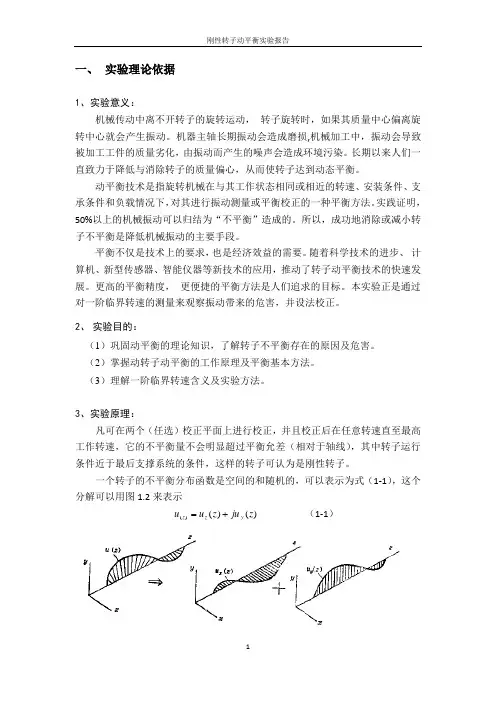
)()()(z ju z u u y z z +=一、 实验理论依据1、实验意义:机械传动中离不开转子的旋转运动, 转子旋转时,如果其质量中心偏离旋转中心就会产生振动。
机器主轴长期振动会造成磨损,机械加工中,振动会导致被加工工件的质量劣化,由振动而产生的噪声会造成环境污染。
长期以来人们一直致力于降低与消除转子的质量偏心,从而使转子达到动态平衡。
动平衡技术是指旋转机械在与其工作状态相同或相近的转速、安装条件、支承条件和负载情况下,对其进行振动测量或平衡校正的一种平衡方法。
实践证明,50%以上的机械振动可以归结为“不平衡”造成的。
所以,成功地消除或减小转子不平衡是降低机械振动的主要手段。
平衡不仅是技术上的要求,也是经济效益的需要。
随着科学技术的进步、 计算机、新型传感器、智能仪器等新技术的应用,推动了转子动平衡技术的快速发展。
更高的平衡精度, 更便捷的平衡方法是人们追求的目标。
本实验正是通过对一阶临界转速的测量来观察振动带来的危害,并设法校正。
2、 实验目的:(1)巩固动平衡的理论知识,了解转子不平衡存在的原因及危害。
(2)掌握动转子动平衡的工作原理及平衡基本方法。
(3)理解一阶临界转速含义及实验方法。
3、实验原理:凡可在两个(任选)校正平面上进行校正,并且校正后在任意转速直至最高工作转速,它的不平衡量不会明显超过平衡允差(相对于轴线),其中转子运行条件近于最后支撑系统的条件,这样的转子可认为是刚性转子。
一个转子的不平衡分布函数是空间的和随机的,可以表示为式(1-1),这个分解可以用图1.2来表示(1-1))(0)(=+=+∑⎰∑⎰i i NyNy yz y W zdz z uW dz z u i 0)(0)(=+=+∑⎰∑⎰ii NzNx zzx W zdz z u W dz z u i图1 函数分解示意图对上图中两个平面力系分别建立平衡方程:(1-2)(1-3)式中Wx 和Wy 分别为x 向与y 向的校正量,i z z i 为校正量所在的轴向坐标,N 为校正量个数,下标i 为校正量序数,这两组方程都只有N=2时才有唯一解,所以为了平衡)(z u x 和)(z u y ,必须和只要有1x W 、2x W 、1y W 和 2y W 四个校正量就足够了,只要安排1x W 和1y W 在同一轴截面上,2x W 和2y W 也在同一轴截面上,它们就可以合并成两个校正量:(1-4)如果将式1.3中的二式都乘以j ,然后分别与式1.2中的两式相加,整理后即得(1-5)这就是刚性转子的动平衡方程,其中第一式称为力平衡方程,第二式称为力偶平衡方程,从这组方程的可容性可知,只有当N=2时才有唯一解。
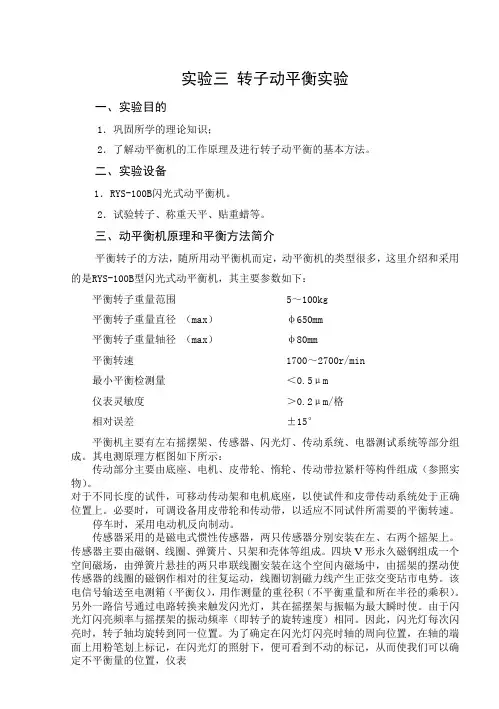
实验三转子动平衡实验一、实验目的1.巩固所学的理论知识;2.了解动平衡机的工作原理及进行转子动平衡的基本方法。
二、实验设备1.RYS-100B闪光式动平衡机。
2.试验转子、称重天平、贴重蜡等。
三、动平衡机原理和平衡方法简介平衡转子的方法,随所用动平衡机而定,动平衡机的类型很多,这里介绍和采用的是RYS-100B型闪光式动平衡机,其主要参数如下:平衡转子重量范围 5~100kg平衡转子重量直径(max)φ650mm平衡转子重量轴径(max)φ80mm平衡转速 1700~2700r/min最小平衡检测量<0.5μm仪表灵敏度>0.2μm/格相对误差±15°平衡机主要有左右摇摆架、传感器、闪光灯、传动系统、电器测试系统等部分组成。
其电测原理方框图如下所示:传动部分主要由底座、电机、皮带轮、惰轮、传动带拉紧杆等构件组成(参照实物)。
对于不同长度的试件,可移动传动架和电机底座,以使试件和皮带传动系统处于正确位置上。
必要时,可调设备用皮带轮和传动带,以适应不同试件所需要的平衡转速。
停车时,采用电动机反向制动。
传感器采用的是磁电式惯性传感器,两只传感器分别安装在左、右两个摇架上。
传感器主要由磁钢、线圈、弹簧片、只架和壳体等组成。
四块V形永久磁钢组成一个空间磁场,由弹簧片悬挂的两只串联线圈安装在这个空间内磁场中,由摇架的摆动使传感器的线圈的磁钢作相对的往复运动,线圈切割磁力线产生正弦交变玷市电势。
该电信号输送至电测箱(平衡仪),用作测量的重径积(不平衡重量和所在半径的乘积)。
另外一路信号通过电路转换来触发闪光灯,其在摇摆架与振幅为最大瞬时使。
由于闪光灯闪亮频率与摇摆架的振动频率(即转子的旋转速度)相同。
因此,闪光灯每次闪亮时,转子轴均旋转到同一位置。
为了确定在闪光灯闪亮时轴的周向位置,在轴的端面上用粉笔划上标记,在闪光灯的照射下,便可看到不动的标记,从而使我们可以确箱上设置有轻、重位置转换开关,以便根据需要显示轻、重点位置。
刚性转子动平衡实验报告
实验目的:
通过刚性转子动平衡实验掌握刚体运动基本规律,理解动平衡原理及其在工程实际中的应用。
实验仪器:
1. 刚性转子动平衡实验台
2. 电动机
3. 传感器及信号处理仪器
4. 电子天平
实验原理:
刚性转子动平衡实验是利用精密测量仪器,将刚体旋转中心偏移量计算出来,进而精确调整转子几何中心与旋转中心的距离,从而达到使动力系统维持平衡运动的目的。
其基本原理为:旋转质量与距离成反比,当转子几何中心与旋转中心重合时,质量和
距离最小,动平衡条件最好,反之,当转子几何中心与旋转中心不重合,质量和距离增大,动平衡条件则变差。
实验步骤:
1. 安装传感器,并将其校准,调整电路、使信号正常。
2. 通过电子天平将转子的质量测量出来,并记录下来。
3. 转动电机,测量转子旋转中心的偏移量,并记录下来。
4. 根据实验结果,计算出转子的旋转惯量,得到动平衡条件公式,并计算出转子几何中心与旋转中心的距离以及需要调整的质量。
5. 调整质量或减小距离,将转子几何中心与旋转中心重合。
6. 多次循环实验,直到转子动平衡状态稳定。
实验结果:
经过多次实验,我们最终得到了一份较为理想的实验结果,转子几何中心与旋转中心重合,转子的质量、惯量和偏移量均满足动平衡条件,系统运行平稳,无明显震动。
实验结论:
通过此次实验,我们深刻认识到刚性转子动平衡的重要性,同时也掌握了刚体运动基本规律,理解了动平衡原理及其在工程实际中的应用。
在今后的工程实践中,我们将更加注重刚性转子动平衡的实际应用,力求做到最优化的效果。
刚性转子现场动平衡理论分析及实验研究共3篇刚性转子现场动平衡理论分析及实验研究1刚性转子现场动平衡理论分析及实验研究摘要:本文研究了刚性转子的现场动平衡问题,通过理论计算和实验测试,得出了刚性转子的动平衡误差和逆时针旋转角速度的相关性,并且对影响动平衡误差的因素进行了分析。
研究表明,在转子控制精度要求较高的情况下,现场动平衡是可以通过逆时针旋转角速度的调节来实现的。
关键词:刚性转子、现场动平衡、逆时针旋转角速度、动平衡误差一、引言在工业生产中,许多机械设备都需要使用到旋转机件,如机床、压缩机、风机等。
然而,旋转机件在运转过程中往往会受到各种因素的影响,如松动、变形、腐蚀等,这些因素会导致机件的动态平衡失衡,产生较大的振动和噪音,影响机械设备的正常运转,甚至会引起设备的严重故障。
因此,动平衡技术的应用就显得非常重要。
动平衡技术是一种通过调整测量到的不平衡量来使旋转机件处于动态平衡状态的技术,它可以有效地降低机器振动和噪音,提高机器的运转稳定性和寿命。
本文针对刚性转子进行现场动平衡理论分析及实验研究,并探讨影响动平衡误差的因素,以期为实际生产提供参考。
二、理论分析1、刚性转子的动平衡误差在刚性转子动平衡过程中,所谓的不平衡量指的是失衡部件引起的质心偏离转子轴线所造成的不平衡力矩。
假设转子为刚性转子,其质量分布均匀,不考虑非刚性因素的影响时,动平衡误差与不平衡量间的关系可以用如下公式表示:$$\Delta m=\frac{e}{\omega ^{2}r}$$其中,$\Delta m$表示动平衡误差;$e$表示转子上不平衡量的投影长度;$\omega$表示逆时针旋转角速度;$r$表示转子半径。
从上述公式可以看出,动平衡误差与逆时针旋转角速度的平方成反比,与转子半径成正比。
因此,在进行动平衡时,应该重点调整逆时针旋转角速度,同时需要考虑转子半径对动平衡误差的影响。
2、逆时针旋转角速度的调节逆时针旋转角速度的调节是现场动平衡的关键,其目的在于通过调整逆时针旋转角速度的大小,使得动平衡误差达到最小值。
刚性转子动平衡实验一、实验目的1.加深对转子动平衡概念的理解; 2.掌握刚性转子动平衡试验的原理及方法; 二、实验设备1.CS-DP-10型动平衡试验机(西安交大监造); 2.刚性转子试件; 3.平衡块;4.百分表:0.01~5MM 、磁性表座。
5. 平衡块三、CS-DP-10型动平衡试验机的结构与工作原理1. 动平衡机的结构动平衡机原理简图如图1、图2所示。
如图1所示,待平衡试件3安装在框形摆架2的支承滚动上,摆架左端固结在工字形板簧1中,右端悬臂。
电机动9通过O 型皮带10拖动试件旋转;当试件存在不平衡质量时,通过转子的旋转,则产生离心惯性力使摆架绕工字形板簧上下周期性地振动。
通过百分表5观察振幅大小,即测量不平衡量的大小,而不平衡量的相位测量系统由差速器4和补偿盘6组成。
差速器4安装在摆架右端,它的左端为转动输入端(N 1)通过柔性联轴器与试件联接;右端为输出端(N 3)与补偿盘固联。
差速器由齿数和模数相同的三个圆锥齿轮①②③和一个蜗轮(转臂H )组成一(10 H n ,则差速器为定轴轮系,其传动比为1311331-=-==Z Zn n i H即 13n n -= (1)这时补偿盘6的转速3n 与试件的转速1n 大小相等转向相反。
(2)当1n 和H n 都转动时则差速器为速度合成的差动轮系,由传动比公式1311331-=-=--=Z Zn n n n i H H H得132n n n H -= (2)蜗轮的转速H n 是通过手柄摇动蜗杆,经蜗杆蜗轮副大速比的减速后蜗轮的转速1n n H 〈〈。
当H n 与1n 同向时由(2)式可知13n n 〈-,这时3n 仍与1n 反向转动但速度减小。
当H n 与1n 反向时由(2)式可知13n n -〉,这时3n 转向仍不就但速度增加。
因此可见当手柄不动时补偿盘的转速与试件的转速大小相等转向相反;正向摇动手柄(蜗轮与试件转动方向相同)补偿盘减速;反向摇动手柄则补偿盘加速。
实验三:刚性转子动平衡实验一、实验目的1、加深对刚性转子动平衡概念的理解;2、掌握刚性转子动平衡实验的原理及基本方法。
3、了解动平衡试验机的结构组成及工作原理。
二、实验设备1、JPH-A 型动平衡实验台;2、转子试件;3、平衡块;4、百分表0~10mm 。
三、实验原理由《机械原理》所述的回转体动平衡原理知:一个动不平衡的刚性回转体绕其回转轴线转动时,该构件上所有的不平衡质量i m 所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡质量1m 和2m (它们的质心位置分别为1r 和2r ,半径大小可根据数值1m 、2m 的不同而不同)所产生的离心力。
动平衡的任务就是在这两个任选的平面(称为平衡基面Ⅰ、Ⅱ)内的适当位置(1r '和2r ')加上两个适当大小的平衡重1m '和2m ',使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,而方向相反,即: 211211-ωωr m r m ''= 222222-ωωr m r m ''= 半径r '越大,则所需的平衡重m '就越小。
此时,ΣF =0且ΣM =0,该回转体达到动平衡。
转子不平衡质量的分布有很大的随机性,而无法直接判断其大小和方位。
因此很难用公式来计算平衡重,但可用实验方法来解决。
“刚性转子动平衡实验”是利用实验用动平衡实验台测定需加于两个平衡基面上的平衡质量的大小和方位,并通过增减配重质量来进行校正,直到达到平衡。
四、实验方法和步骤1、将平衡试件装到摆架的滚轮上,把试件右端的联轴器盘与差速器轴端的联轴器盘,用弹性柱销柔性联成一体。
装上传动皮带。
2、用手转动试件和摇动蜗杆上的手柄,检查动平衡机各部分转动是否正常。
松开摆架最右端的两对锁紧螺母,调节摆架上面的安放在支承杆上的百分表,使之与摆架有一定的接触,并随时注意振幅大小。
3、开机前将试件右端圆盘上装上适当的待平衡质量(四块平衡块),接上电源启动电机,待摆架振动稳定后,调整好百分表的位置并记录下振幅大小y0(格),百分表的位置以后不要再变动,停机。
第1篇一、实验目的1. 掌握刚性转子动平衡设计的原理和方法;2. 掌握在动平衡机上对刚性转子进行动平衡的原理和方法;3. 了解动平衡机的结构、工作原理和使用方法;4. 了解动平衡实验的原理和方法。
二、实验原理刚性转子动平衡实验主要基于回转体动平衡原理。
当一个动不平衡的刚性回转体绕其回转轴线转动时,该构件上所有的不平衡重所产生的离心惯性力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡重和G2所产生的离心力。
动平衡的任务就是在这两个任选的平面(称为平衡基面)内的适当位置(r1平和r2平)加上两个适当大小的平衡重G1平和G2平,使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,方向相反,即P0且M0,该回转体达到动平衡。
三、实验设备与材料1. CS-DP-10型动平衡试验机;2. RYS-5A闪光式工业动平衡试验机;3. YYQ—50型硬支承工业动平衡机;4. 各类转子;5. 加重块;6. 天平;7. 橡皮泥;8. 手工具。
四、实验步骤1. 准备实验材料,包括各类转子、加重块、天平等;2. 按照实验要求,将转子安装在动平衡机上;3. 对转子进行初步平衡,调整转子在动平衡机上的位置,使转子达到静平衡;4. 使用动平衡机检测转子在高速旋转时的不平衡量;5. 根据检测到的不平衡量,计算所需平衡重的大小和位置;6. 在转子适当位置加上平衡重,使转子达到动平衡;7. 再次使用动平衡机检测转子不平衡量,验证动平衡效果;8. 记录实验数据,分析实验结果。
五、实验结果与分析1. 实验过程中,通过调整转子在动平衡机上的位置,使转子达到静平衡;2. 使用动平衡机检测转子在高速旋转时的不平衡量,根据检测结果计算所需平衡重的大小和位置;3. 在转子适当位置加上平衡重,使转子达到动平衡;4. 再次使用动平衡机检测转子不平衡量,验证动平衡效果,实验结果符合要求。
六、实验结论1. 通过本次实验,掌握了刚性转子动平衡设计的原理和方法;2. 掌握了在动平衡机上对刚性转子进行动平衡的原理和方法;3. 了解动平衡机的结构、工作原理和使用方法;4. 了解动平衡实验的原理和方法。
转子动平衡实验报告姓名张晨学号E11A0101 实验日期2012.4. 26 指导老师刘本东成绩转子动平衡实验报告一﹑实验目的1. 巩固转子动平衡知识,加深转子动平衡概念的理解;2. 掌握刚性转子动平衡实验的原理及基本方法。
3.了解动平衡试验机的组成﹑工作原理,通过参数化和可视化的方法,观察转子动平衡虚拟实验的平衡效果。
二﹑实验设备及工具DPH—I型智能动平衡机结构如图一所示。
测试系统由计算机,数据采集器﹑高灵敏度有源压电传感器和光电相位传感器等组成。
三﹑实验记录及结果调整前不平衡质量调整添加质量次数左边右边左边右边角度克数角度克数角度克数角度克数1 -25° 1.27 -25° 1.20 155° 1.1 155° 1.12 58°0.31 219°0.41 240°0.1 40°0.23 177°0.28 232°0.264对应曲线如图:四﹑思考题1. 转子(试件)在什么情况下静平衡?什么情况下作动平衡?答:定义1)静平衡在转子一个校正面上进行校正平衡,校正后的剩余不平衡量,以保证转子在静态时是在许用不平衡量的规定范围内,为静平衡又称单面平衡。
2)动平衡在转子两个校正面上同时进行校正平衡,校正后的剩余不平衡量,以保证转子在动态时是在许用不平衡量的规定范围内,为动平衡又称双面平衡。
转子平衡的选择与确定如何选择转子的平衡方式,是一个关键问题。
其选择有这样一个原则:只要满足于转子平衡后用途需要的前提下,能做静平衡的,则不要做动平衡,能做动平衡的,则不要做静动平衡。
原因很简单,静平衡要比动平衡容易做,动平衡要比静动平衡容易做,省功、省力、省费用。
五﹑收获和体会通过这次刚性转子动平衡实验,自己重温了转子动平衡的知识,加深了对转子动平衡的理解。
我也了解了转子动平衡试验机的组成,学会了如何使用它来调节转子平衡。
带传动-刚性转子动平衡实验报告水带传动-刚性转子动平衡实验报告实验目的本实验目的旨在理解水带传动-刚性转子(flexible shaft drive-rigid rotor)系统的动平衡原理,分析并给出水带传动-刚性转子动平衡技术参数,并验证水带传动-刚性转子动平衡技术的可靠性。
实验内容实验内容包括对水带传动-刚性转子系统结构和工作原理的理解;实验中使用的设备和指标;实验主体的设计、实验、结果分析以及实验结论的提出等。
实验步骤(一)实验设备的准备1.水带传动装置:实验中安装一个水带传动装置,用于将电机的输出能量转换为刚性转子的转动力矩。
2.刚性转子:实验中使用一个刚性转子,该转子具有较大的转动惯量,能够较好地发挥其重力平衡效果。
3.力传感器:实验中安装力传感器在刚性转子的轴上,用于测量刚性转子的旋转均衡度。
4.测速:实验中安装一个测速仪,用于测量刚性转子的转速和直线加速度。
(二)实验设置2.调节刚性转子、测速仪与振动仪的位置:调整水带传动系统,安装测速仪,振动仪靠近电机并连接力传感器,以便测量刚性转子的转动惯量。
3.校准测速仪和振动仪:为了确保测量结果的准确性,需要先校准测速仪和振动仪。
(三)实验安排实验中,实验主要包括建立水带传动-刚性转子模型,调整外部条件,实验过程中变更转子转动惯量,改变转子重量对模型动平衡性能的影响,以及实验中测量转子动平衡性能的数据,并根据数据进行分析比较。
实验结果根据变更转子转动惯量的实验,刚性转子的动平衡性能已得到改善。
实验结果反映,当刚性转子的转动惯量增加时,刚性转子的动平衡性能也随之提高。
实验中观察到,当刚性转子重量增加时,动平衡性能表现较好;但当它增加到一定程度时,动平衡性能会受到影响。
本实验表明,水带传动-刚性转子动平衡技术可以改善系统的动平衡状况,实现系统的动平衡效果。
实验中发现,系统动平衡效果随着转子转动惯量的增加而提高。
但随着转子重量的增加,动平衡性能也会受到一定限制,因此在实际应用中,需要根据具体的条件和要求来指定转子的转动惯量和重量。
1 刚性转子的动平衡试验一、实验目的1)巩固刚性转子静、动平衡的理论知识;2)熟悉动平衡机工作原理及转子动平衡的基本方法;3)了解动平衡机的结构及使用方法。
二、实验原理(YYW-1600硬支承平衡试验台的工作原理)1)动平衡机的结构2)转子动平衡的力学条件由于转子材料的不均匀、制造的误差、结构的不对称等诸因素保存转子存在不平衡质量。
因此当转子旋转后就会产生离心惯性力组成一个空间力系,使转子动不平衡。
要使转子达到动平衡,则必须满足空间力系的平衡条件{ 或 { 这就是转子动平衡的力学条件。
3)动平衡机的工作原理 当试件上有不平衡质量存在时(图2),试件转动后则产生离心惯性力mr F 2ω=,要分解成垂直分力y F 和水平分力x F ,由于平衡机和摆架在垂直方向抗弯刚度很大,所以垂直分力Fy 对摆架的振动影响很小可忽略不计。
而在水平方向的抗弯刚度小,因此水平分力产生的力矩L mr L F M x ⋅=⋅=ϕωcos 2的作用下,使摆架产生周期性的左右振动(摆架振幅大小)的惯性力矩为2222221cos ,0ϕωl r m M M ==要使摆架不振动必须要平衡力矩2M 。
在试件上选择圆盘作为平衡平面,加平衡质量P m 。
则绕x 轴的惯性力矩P P P P P l r m M ϕωcos 2=;要使这些力矩得到平衡可根据公式(3)来解决。
0=∑A M 02=+P M M0cos cos 222222=+P P P P l r m l r m ϕωϕω(4) (4)式消去2ω得0cos cos 2222=+P P P P l r m l r m ϕϕ (5)要使(5)式为零必须满足 { ()P P PP P l r m l r m ϕϕϕ+=-==02222180cos cos cos (6)满足上式(6)的条件摆架就不振动了。
式中m (质量)和r (矢径)之积称为质径积,mrL 称为质径矩,ϕ称为相位角。
实验三 刚性转子动平衡实验2016年9月一、实验目的(1) 掌握刚性转子动平衡的基本原理和步骤; (2) 掌握虚拟基频检测仪和相关测试仪器的使用; (3) 了解动静法的工程应用;(4) 了解国家标准(GB)对转子动平衡性能评价方式和相关要求。
二、实验内容采用两平面影响系数法对一多圆盘刚性转子进行动平衡三、实验原理工作转速低于最低阶临界转速的转子称为刚性转子,反之称为柔性转子。
本实验采取一种刚性转子动平衡常用的方法—两平面影响系数法。
该方法可以不使用专用平衡机,只要求一般的振动测量,适合在转子工作现场进行平衡作业。
根据理论力学的动静法原理,一匀速旋转的长转子,其连续分布的离心惯性力系,可向质心C 简化为过质心的一个力R (大小和方向同力系的主向量∑iR =S)和一个力偶M (等于力系对质心C 的主矩∑C i C M =m (S )=Μ),见图一。
如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力R 和力偶矩M 的值均为零。
这种情况称转子是平衡的;反之,不满足上述条件的转子是不平衡的。
不平衡转子的轴与轴承之间产生交变的作用力和反作用力,可引起轴承座和转轴本身的强烈振动,从而影响机器的工作性能和工作寿命。
图一 转子系统与力系简化刚性转子动平衡的目标是使离心惯性力系的主向量和主矩的值同时趋近于零。
为此,先在转子上任意选定两个截面I 、II (称校正平面),在离轴线一定距离1r 、2r (称校正半径),与转子上某一参考标记成夹角1θ、2θ处,分别附加一块质量为1m 、2m 的重块(称校正质量)。
如能使两质量1m 和2m 的离心惯性力(其大小分别为211ωr m 和222ωr m ,ω为转动角速度)正好与原不平衡转子的离心惯性力系相平衡,那么就实现了刚性转子的动平衡。
两平面影响系数法的实现过程如下:(1)在额定的工作转速或任选的平衡转速下,检测原始不平衡引起的轴承或轴颈A 、B 在某方位的振动量00A A V ψ∠=A0V 和000B B B V ψ∠=V ,其中0A V 和0B V 是振动位移(也可以是速度或加速度)的幅值,0A ψ和0B ψ是振动信号对于转子上参考标记有关的参考脉冲的相位角。