MATLAB在化工中的应用 非线性方程(组)求解与迭代法
- 格式:ppt
- 大小:125.50 KB
- 文档页数:19

求解线性方程组solve,linsolve例:A=[5 0 4 2;1 -1 2 1;4 1 2 0;1 1 1 1];%矩阵的行之间用分号隔开,元素之间用逗号或空格B=[3;1;1;0]X=zeros(4,1);%建立一个4元列向量X=linsolve(A,B)diff(fun,var,n):对表达式fun中的变量var求n阶导数。
例如:F=sym('u(x,y)*v(x,y)'); %sym()用来定义一个符号表达式diff(F); %matlab区分大小写pretty(ans) %pretty():用习惯书写方式显示变量;ans是答案表达式非线性方程求解fsolve(fun,x0,options)其中fun为待解方程或方程组的文件名;x0位求解方程的初始向量或矩阵;option为设置命令参数建立文件fun.m:function y=fun(x)y=[x(1)-0.5*sin(x(1))-0.3*cos(x(2)), ...x(2) - 0.5*cos(x(1))+0.3*sin(x(2))];>>clear;x0=[0.1,0.1];fsolve(fun,x0,optimset('fsolve'))注:...为续行符m文件必须以function为文件头,调用符为;文件名必须与定义的函数名相同;fsolve()主要求解复杂非线性方程和方程组,求解过程是一个逼近过程。
Matlab求解线性方程组AX=B或XA=B在MATLAB中,求解线性方程组时,主要采用前面章节介绍的除法运算符“/”和“\”。
如:X=A\B表示求矩阵方程AX=B的解;X=B/A表示矩阵方程XA=B的解。
对方程组X=A\B,要求A和B用相同的行数,X和B有相同的列数,它的行数等于矩阵A的列数,方程X=B/A同理。
如果矩阵A不是方阵,其维数是m×n,则有:m=n 恰定方程,求解精确解;m>n 超定方程,寻求最小二乘解;m<n 不定方程,寻求基本解,其中至多有m个非零元素。

非线性方程组求解的牛顿迭代法用MATLAB实现首先,我们需要定义非线性方程组。
假设我们要求解方程组:```f1(x1,x2)=0f2(x1,x2)=0```其中,`x1`和`x2`是未知数,`f1`和`f2`是非线性函数。
我们可以将这个方程组表示为向量的形式:```F(x)=[f1(x1,x2);f2(x1,x2)]=[0;0]```其中,`F(x)`是一个列向量。
为了实现牛顿迭代法,我们需要计算方程组的雅可比矩阵。
雅可比矩阵是由方程组的偏导数组成的矩阵。
对于方程组中的每个函数,我们可以计算其对每个变量的偏导数,然后将这些偏导数组成一个矩阵。
在MATLAB中,我们可以使用`jacobi`函数来计算雅可比矩阵。
以下是一个示例函数的定义:```matlabfunction J = jacobi(x)x1=x(1);x2=x(2);J = [df1_dx1, df1_dx2; df2_dx1, df2_dx2];end```其中,`x`是一个包含未知数的向量,`df1_dx1`和`df1_dx2`是`f1`对`x1`和`x2`的偏导数,`df2_dx1`和`df2_dx2`是`f2`对`x1`和`x2`的偏导数。
下一步是实现牛顿迭代法。
牛顿迭代法的迭代公式为:```x(k+1)=x(k)-J(x(k))\F(x(k))```其中,`x(k)`是第`k`次迭代的近似解,`\`表示矩阵的求逆操作。
在MATLAB中,我们可以使用如下代码来实现牛顿迭代法:```matlabfunction x = newton_method(x_initial)max_iter = 100; % 最大迭代次数tol = 1e-6; % 收敛阈值x = x_initial; % 初始解for k = 1:max_iterF=[f1(x(1),x(2));f2(x(1),x(2))];%计算F(x)J = jacobi(x); % 计算雅可比矩阵 J(x)delta_x = J \ -F; % 计算增量 delta_xx = x + delta_x; % 更新 xif norm(delta_x) < tolbreak; % 达到收敛条件,停止迭代endendend```其中,`x_initial`是初始解的向量,`max_iter`是最大迭代次数,`tol`是收敛阈值。
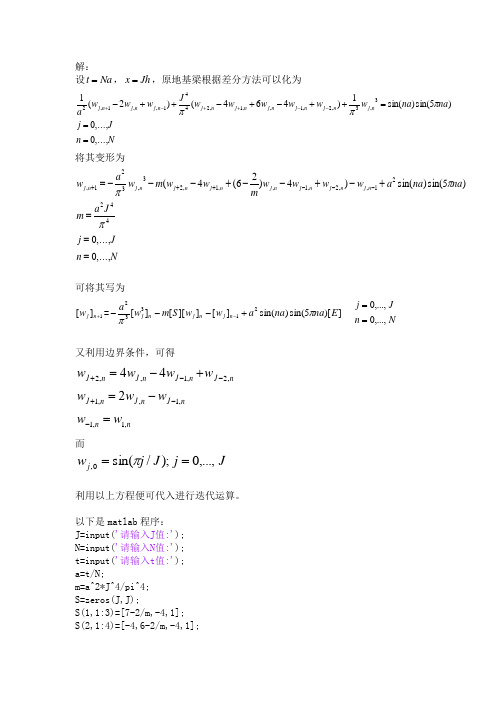
解:设Na t =,Jh x =,原地基梁根据差分方法可以化为Nn Jj na na w w w w w w J w w w a n j n j n j n j n j n j n j n j n j ,...,0,...,0)5sin()sin(1)464()2(13,3,2,1,,1,2441,,1,2===++-+-++---++-+πππ将其变形为Nn Jj J a m na na a w w w w mw w m w a w n j n j n j n j n j n j n j n j ,...,0,...,0)5sin()sin()4)26(4(44221,,2,1,,1,23,321,===+-+--+---=---+++πππ可将其写为1][+n j w =n j w a ][332π-n j w S m ]][[-1][--n j w ])[5sin()sin(2E na na a π+ N n J j ,...,0,...,0==又利用边界条件,可得nn nJ n J n J nJ n J n J n J w w w w w w w w w ,1,1,1,,1,2,1,,2244=-=+-=--+--+而 J j J j w j ,...,0);/sin(0,==π利用以上方程便可代入进行迭代运算。
以下是matlab 程序:J=input('请输入J 值:');N=input('请输入N 值:');t=input('请输入t 值:');a=t/N;m=a^2*J^4/pi^4;S=zeros(J,J);S(1,1:3)=[7-2/m,-4,1];S(2,1:4)=[-4,6-2/m,-4,1];for i=1:J-4S(i+2,i:i+4)=[1,-4,6-2/m,-4,1];endS(J-1,J-3:J)=[1,-4,5-2/m,-2];S(J,J-2:J)=[2,-4,2-2/m];E=zeros(J,1);E(:,1)=1;W=zeros(J,N+2);for j=1:JW(j,1)=sin(pi*j/J);endW(:,2)=0.5*((-a^2/pi^3)*(W(:,1).^3)-m*S*W(:,1));for n=3:N+2W(:,n)=(-a^2/pi^3)*(W(:,n-1).^3)-m*S*W(:,n-2)-W(:,n-2)+(a^2)*sin(n*a)*sin(5*pi*n*a)*E;end根据差分格式的收敛性讨论可知,当2102≤<N t J 时,差分格式能够收敛。

Matlab 在化工数值计算中的应用(提纲) 基础知识Command Window 指令窗简介最简单的计算器使用方法加减乘除和幂运算符、矩阵的输入形式、常见表达式形式数值、变量和表达式数值的表示方法(十进制、科学记数)、变量命名规则(对大小写敏感,变量名的第一个字母必须为英文字母,不得含空格,但可含下划线链接符)、Matlab 默认的预定义变量(ans/inf/i 或j/pi/NaN 等)、复数和复数矩阵(把复数作为一个整体处理、real(z),imag(z),abs(z)/模,angle(z)/相角)。
例1:已知/612334,12,2i z i z i z e π=+=+=,并计算123/z z z z =计算结果的图形表示。
例2:画出衰减振荡曲线/3sin3t y e t -=及它的包络线并计算/30t y e -=。
t 的取值范围是[]04π, t=0:pi/80:4*pi; %定义自变量取值数组y0=exp(-t/3); %计算与自变量相应的y0数组y=exp(-t/3).*sin(3*t);%计算与自变量相应的y 数组plot(t,y,'-r',t,y0,':b',t,-y0,':b') %用不同颜色,不同线条绘制曲线数值计算结果的显示格式format/format short, format long, format short e, format long e, 标点符号的使用指令窗的常用控制指令clc, clear,edit, help, exit/quit, typeM 角本文件的编写与运算路径的制定帮助系统数值数组及其运算数组及其运算是Matlab 的核心内容2.1 一维数组的创建与赋值(逐个元素输入法、冒号生成法);2.2 二维数组的创建与复制(直接输入法)2.3 执行数组运算的常用函数三角函数、反三角函数、幂指对函数、复数函数(abs,angle,conj (共厄复数),imag,real)2.4 数组运算与矩阵运算A.’, A’,S./B,s*inv(B),A.^n,A^n,A.*B,A*B,A./B,A/B,f(A)注意运算符的小黑点。

非线性方程组求解1.mulStablePoint用不动点迭代法求非线性方程组的一个根function [r,n]=mulStablePoint(F,x0,eps)%非线性方程组:f%初始解:a%解的精度:eps%求得的一组解:r%迭代步数:nif nargin==2eps=1.0e-6;endx0 = transpose(x0);n=1;tol=1;while tol>epsr= subs(F,findsym(F),x0); %迭代公式tol=norm(r-x0); %注意矩阵的误差求法,norm为矩阵的欧几里德范数n=n+1;x0=r;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endend2.mulNewton用牛顿法法求非线性方程组的一个根function [r,n]=mulNewton(F,x0,eps)if nargin==2eps=1.0e-4;endx0 = transpose(x0);Fx = subs(F,findsym(F),x0);var = findsym(F);dF = Jacobian(F,var);dFx = subs(dF,findsym(dF),x0);r=x0-inv(dFx)*Fx;n=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);dFx = subs(dF,findsym(dF),x0);r=x0-inv(dFx)*Fx; %核心迭代公式tol=norm(r-x0);n=n+1;if(n>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend3.mulDiscNewton用离散牛顿法法求非线性方程组的一个根function [r,m]=mulDiscNewton(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=transpose(x0)-inv(J)*fx;m=1;tol=1;while tol>epsxs=r;fx = subs(F,findsym(F),xs);J = zeros(n,n);for i=1:nx1 = xs;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=xs-inv(J)*fx; %核心迭代公式tol=norm(r-xs);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;4.mulMix用牛顿-雅可比迭代法求非线性方程组的一个根function [r,m]=mulMix(F,x0,h,l,eps)if nargin==4eps=1.0e-4;endn = length(x0);J = zeros(n,n);Fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));C =D - J;inD = inv(D);H = inD*C;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = Hm*inD*Fx;r = transpose(x0)-dr; m=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));C =D - J;inD = inv(D);H = inD*C;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = Hm*inD*Fx;r = x0-dr; %核心迭代公式tol=norm(r-x0);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend5.mulNewtonSOR用牛顿-SOR迭代法求非线性方程组的一个根function [r,m]=mulNewtonSOR(F,x0,w,h,l,eps)if nargin==5eps=1.0e-4;endn = length(x0);J = zeros(n,n);Fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));L = -tril(J-D);U = -triu(J-D);inD = inv(D-w*L);H = inD*(D - w*D+w*L);;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = w*Hm*inD*Fx;r = transpose(x0)-dr;m=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));L = -tril(J-D);U = -triu(J-D);inD = inv(D-w*L);H = inD*(D - w*D+w*L);;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = w*Hm*inD*Fx;r = x0-dr; %核心迭代公式tol=norm(r-x0);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend6.mulDNewton用牛顿下山法求非线性方程组的一个根function [r,m]=mulDNewton(F,x0,eps)%非线性方程组:F%初始解:x0%解的精度:eps%求得的一组解:r%迭代步数:nif nargin==2eps=1.0e-4;endx0 = transpose(x0);dF = Jacobian(F);m=1;tol=1;while tol>epsttol=1;w=1;Fx = subs(F,findsym(F),x0);dFx = subs(dF,findsym(dF),x0);F1=norm(Fx);while ttol>=0 %下面的循环是选取下山因子w的过程r=x0-w*inv(dFx)*Fx; %核心的迭代公式Fr = subs(F,findsym(F),r);ttol=norm(Fr)-F1;w=w/2;endtol=norm(r-x0);m=m+1;x0=r;if(m>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endend7.mulGXF1用两点割线法的第一种形式求非线性方程组的一个根function [r,m]=mulGXF1(F,x0,x1,eps)format long;if nargin==3eps=1.0e-4;endx0 = transpose(x0);x1 = transpose(x1);n = length(x0);fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);for i=1:nxt = x1;xt(i) = x0(i);J(:,i) = (subs(F,findsym(F),xt)-fx1)/h(i);endr=x1-inv(J)*fx1;m=1;tol=1;while tol>epsx0 = x1;x1 = r;fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);for i=1:nxt = x1;xt(i) = x0(i);J(:,i) = (subs(F,findsym(F),xt)-fx1)/h(i);endr=x1-inv(J)*fx1;tol=norm(r-x1);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;8.mulGXF2用两点割线法的第二种形式求非线性方程组的一个根function [r,m]=mulGXF2(F,x0,x1,eps)format long;if nargin==3eps=1.0e-4;endx0 = transpose(x0);x1 = transpose(x1);n = length(x0);fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);xt = x1;xt(1) = x0(1);J(:,1) = (subs(F,findsym(F),xt)-subs(F,findsym(F),x1))/h(1);for i=2:nxt = x1;xt(1:i) = x0(1:i);xt_m = x1;xt_m(1:i-1) = x0(1:i-1);J(:,i) = (subs(F,findsym(F),xt)-subs(F,findsym(F),xt_m))/h(i);endr=x1-inv(J)*fx1;m=1;tol=1;while tol>epsx0 = x1;x1 = r;fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);xt = x1;xt(1) = x0(1);J(:,1) = (subs(F,findsym(F),xt)-subs(F,findsym(F),x1))/h(1);for i=2:nxt = x1;xt(1:i) = x0(1:i);xt_m = x1;xt_m(1:i-1) = x0(1:i-1);J(:,i) = (subs(F,findsym(F),xt)-subs(F,findsym(F),xt_m))/h(i);endr=x1-inv(J)*fx1;tol=norm(r-x1);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;9.mulVNewton用拟牛顿法求非线性方程组的一组解function [r,m]=mulVNewton(F,x0,A,eps)%方程组:F%方程组的初始解:x0% 初始A矩阵:A%解的精度:eps%求得的一组解:r%迭代步数:mif nargin==2A=eye(length(x0)); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendx0 = transpose(x0);Fx = subs(F, findsym(F),x0);r=x0-A\Fx;m=1;tol=1;while tol>epsx0=r;Fx = subs(F, findsym(F),x0);r=x0-A\Fx;y=r-x0;Fr = subs(F, findsym(F),r);z= Fr-Fx;A1=A+(z-A*y)*transpose(y)/norm(y); %调整A A=A1;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end10.mulRank1用对称秩1算法求非线性方程组的一个根function [r,n]=mulRank1(F,x0,A,eps)if nargin==2l = length(x0);A=eye(l); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-inv(A)*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-inv(A)*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;A1=A+ fr *transpose(fr)/(transpose(fr)*y); %调整A A=A1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end11.mulDFP用D-F-P算法求非线性方程组的一组解function [r,n]=mulDFP(F,x0,A,eps)if nargin==2l = length(x0);B=eye(l); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-B*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-B*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;B1=B+ y*y'/(y'*z)-B*z*z'*B/(z'*B*z); %调整AB=B1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end12.mulBFS用B-F-S算法求非线性方程组的一个根function [r,n]=mulBFS(F,x0,B,eps)if nargin==2l = length(x0);B=eye(l); %B取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-B*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-B*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;u = 1 + z'*B*z/(y'*z);B1= B+ (u*y*y'-B*z*y'-y*z'*B)/(y'*z); %调整B B=B1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end13.mulNumYT用数值延拓法求非线性方程组的一组解function [r,m]=mulNumYT(F,x0,h,N,eps)format long;if nargin==4eps=1.0e-8;endn = length(x0);fx0 = subs(F,findsym(F),x0);x0 = transpose(x0);J = zeros(n,n);for k=0:N-1fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endinJ = inv(J);r=x0-inJ*(fx-(1-k/N)*fx0);x0 = r;endm=1;tol=1;while tol>epsxs=r;fx = subs(F,findsym(F),xs);J = zeros(n,n);for i=1:nx1 = xs;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=xs-inv(J)*fx; %核心迭代公式tol=norm(r-xs);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;14.DiffParam1用参数微分法中的欧拉法求非线性方程组的一组解function r=DiffParam1(F,x0,h,N)%非线性方程组:f%初始解:x0%数值微分增量步大小:h%雅可比迭代参量:l%解的精度:eps%求得的一组解:r%迭代步数:nx0 = transpose(x0);n = length(x0);ht = 1/N;Fx0 = subs(F,findsym(F),x0);for k=1:NFx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endinJ = inv(J);r = x0 - ht*inJ*Fx0;x0 = r;end15.DiffParam2用参数微分法中的中点积分法求非线性方程组的一组解function r=DiffParam2(F,x0,h,N)%非线性方程组:f%初始解:x0%数值微分增量步大小:h%雅可比迭代参量:l%解的精度:eps%求得的一组解:r%迭代步数:nx0 = transpose(x0);n = length(x0);ht = 1/N;Fx0 = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nxt = x0;xt(i) = xt(i)+h(i);J(:,i) = (subs(F,findsym(F),xt)-Fx0)/h(i);endinJ = inv(J);x1 = x0 - ht*inJ*Fx0;for k=1:Nx2 = x1 + (x1-x0)/2;Fx2 = subs(F,findsym(F),x2);J = zeros(n,n);for i=1:nxt = x2;xt(i) = xt(i)+h(i);J(:,i) = (subs(F,findsym(F),xt)-Fx2)/h(i);endinJ = inv(J);r = x1 - ht*inJ*Fx0;x0 = x1;x1 = r;end16.mulFastDown用最速下降法求非线性方程组的一组解function [r,m]=mulFastDown(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endlamda = fx/sum(diag(transpose(J)*J));r=x0-J*lamda; %核心迭代公式fr = subs(F,findsym(F),r);tol=dot(fr,fr);x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;17.mulGSND用高斯牛顿法求非线性方程组的一组解function [r,m]=mulGSND(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endDF = inv(transpose(J)*J)*transpose(J);r=x0-DF*fx; %核心迭代公式tol=norm(r-x0);x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;18.mulConj用共轭梯度法求非线性方程组的一组解function [r,m]=mulConj(F,x0,h,eps)format long;if nargin==3eps=1.0e-6;endn = length(x0);x0 = transpose(x0);fx0 = subs(F,findsym(F),x0);p0 = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)*(1+h);p0(:,i) = -(subs(F,findsym(F),x1)-fx0)/h;endm=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endlamda = fx/sum(diag(transpose(J)*J));r=x0+p0*lamda; %核心迭代公式fr = subs(F,findsym(F),r);Jnext = zeros(n,n);for i=1:nx1 = r;x1(i) = x1(i)+h;Jnext(:,i) = (subs(F,findsym(F),x1)-fr)/h;endabs1 = transpose(Jnext)*Jnext;abs2 = transpose(J)*J;v = abs1/abs2;if (abs(det(v)) < 1)p1 = -Jnext+p0*v;elsep1 = -Jnext;endtol=norm(r-x0);p0 = p1;x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;19.mulDamp用阻尼最小二乘法求非线性方程组的一组解function [r,m]=mulDamp(F,x0,h,u,v,eps)format long;if nargin==5eps=1.0e-6;endFI = transpose(F)*F/2;n = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsj = 0;fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;afx = subs(F,findsym(F),x1);J(:,i) = (afx-fx)/h;endFIx = subs(FI,findsym(FI),x0);for i=1:nx2 = x0;x2(i) = x2(i)+h;gradFI(i,1) = (subs(FI,findsym(FI),x2)-FIx)/h;ends=0;while s==0A = transpose(J)*J+u*eye(n,n);p = -A\gradFI;r = x0 + p;FIr = subs(FI,findsym(FI),r);if FIr<FIxif j == 0u = u/v;j = 1;elses=1;endelseu = u*v;j = 1;if norm(r-x0)<epss=1;endendendx0 = r;tol = norm(p);m=m+1;if(m>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endendformat short;。
第7章 求解非线性方程7.1 多项式运算在MATLAB 中的实现一、多项式的表达n 次多项式表达为:n a +⋯⋯++=x a x a x a p(x)1-n 1-n 1n 0,是n+1项之和 在MATLAB 中,n 次多项式可以用n 次多项式系数构成的长度为n+1的行向量表示[a0, a1,……an-1,an]二、多项式的加减运算 设有两个多项式na +⋯⋯++=x a x a x a p1(x)1-n 1-n 1n 0和m b +⋯⋯++=x b x b x b p2(x)1-m 1-m 1m 0。
它们的加减运算实际上就是它们的对应系数的加减运算。
当它们的次数相同时,可以直接对多项式的系数向量进行加减运算。
当它们的次数不同时,应该把次数低的多项式无高次项部分用0系数表示。
例2 计算()()1635223-+++-x x x xa=[1, -2, 5, 3]; b=[0, 0, 6, -1]; c=a+b例 3 设()6572532345++-+-=x x x x x x f ,()3532-+=x x x g ,求f(x)+g(x)f=[3, -5, 2, -7, 5, 6]; g=[3, 5, -3]; g1=[0, 0, 0, g];%为了和f 的次数找齐f+g1, f-g1三、多项式的乘法运算conv(p1,p2)例4 在上例中,求f(x)*g(x)f=[3, -5, 2, -7, 5, 6]; g=[3, 5, -3]; conv(f, g)四、多项式的除法运算[Q, r]=deconv(p1, p2)表示p1除以p2,给出商式Q(x),余式r(x)。
Q,和r 仍为多项式系数向量 例4 在上例中,求f(x)/g(x)f=[3, -5, 2, -7, 5, 6]; g=[3, 5, -3]; [Q, r]=deconv(f, g) 五、多项式的导函数p=polyder(P):求多项式P 的导函数 p=polyder(P,Q):求P ·Q 的导函数[p,q]=polyder(P,Q):求P/Q 的导函数,导函数的分子存入p ,分母存入q 。
1.fsolve求解非线性方程组方程:F(x)=0x是一个向量,F(x)是该向量的函数向量,返回向量值2.语法x = fsolve(fun,x0)x = fsolve(fun,x0,options)[x,fval] = fsolve(fun,x0)[x,fval,exitflag] = fsolve(...)[x,fval,exitflag,output] = fsolve(...)[x,fval,exitflag,output,jacobian] = fsolve(...)3.描述fsolve 用于寻找非线性系统方程组的零点。
x = fsolve(fun,xO)以x0为初始值,努力寻找在fun中描述的方程组。
x = fsolve(fun,xO,options)以x0为初始值,按照指定的优化设置“options努力寻找在fun 中描述的方程组。
使用optimset 设置这些选项。
[x,fval] = fsolve(fun,xO)返回在解x处的目标函数fun的值[x,fval,exitflag] = fsolve(...)返回exitflag 表示退出条件。
[x,fval,exitflag,output] = fsolve(...)返回output 结构,该结构包含了优化信息。
[x,fval,exitflag,output,jacobian]二fsolve(…)返回在解x 处的Jacobian 函数。
4.输入参数4.1."fun非线性系统方程。
它是一个函数,以x作为输入,返回向量F。
函数fun可以被指定为一个M 文件函数的函数句柄。
x = fsolve(@myfun,x0)这里的myfun 是一个matlab 函数,形如:function F = myfun(x)F = ...% Compute function values at xfun 也可以是一个异步函数的函数句柄:x = fsolve(@(x)sin(x.*x),x0);若用户定义的值为矩阵,则会被自动转换为向量。
matlab迭代计算方程组
在MATLAB中,迭代计算方程组通常涉及使用循环结构来逐步逼近方程组的解。
这种方法通常用于无法直接求解的复杂方程组或者大规模方程组的情况。
下面我将从几个方面介绍在MATLAB中进行迭代计算方程组的方法。
首先,最常见的迭代方法之一是雅可比迭代法。
在MATLAB中,可以通过编写一个循环来实现雅可比迭代。
具体步骤包括初始化一个解向量、编写迭代循环以更新解向量,并设置一个收敛准则来判断迭代是否结束。
其次,另一个常用的迭代方法是高斯-赛德尔迭代法。
这种方法在雅可比迭代的基础上进行了改进,每次更新解向量时都使用最新的已知解。
在MATLAB中,可以使用类似的循环结构来实现高斯-赛德尔迭代。
此外,MATLAB还提供了一些内置函数来进行迭代计算方程组,比如`fsolve`函数可以用于求解非线性方程组,`linsolve`函数可以用于求解线性方程组。
这些函数通常会在迭代过程中自动选择合适的算法,并提供了一些参数用于控制迭代的精度和收敛性。
总的来说,在MATLAB中进行迭代计算方程组可以通过编写循环结构来逐步逼近解,也可以利用内置函数来简化计算过程。
需要根据具体的方程组和求解精度来选择合适的方法,并注意迭代过程中的收敛性和稳定性。
希望这些信息能够帮助你更好地理解在MATLAB 中进行迭代计算方程组的方法。