(中职)化工仪表及自动化第一章3
- 格式:ppt
- 大小:668.00 KB
- 文档页数:14
化工仪表及自动化答案(总8页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除第一章 自动控制系统基本概念4.自动控制系统主要由哪些环节组成?答:主要由测量与变送器 、自动控制器、执行器、被控对象组成。
9.试分别说明什么是被控对象、被控变量、给定值、操纵变量?答:在自动控制系统中,将需要控制其工艺参数的生产设备或机器叫被控对象。
生产过程中所要保持恒定的变量,在自动控制系统中称为被控变量。
工艺上希望保持的被控变量即给定值。
具体实现控制作用的变量叫做操纵变量。
12.什么是负反馈负反馈在自动控制系统中有什么重要意义答:系统的输出变量是被控变量,但是它经过测量元件和变送器后,又返回到系统的输入端,能够使原来的信号减弱的做法叫做负反馈。
负反馈在自动控制系统中的重要意义是当被控变量,y 受到干扰的影响而升高时,只有负反馈才能使反馈信号升高,经过比较到控制器去的偏差信号将降低,此时控制器将发出信号而使控制阀的开度发生变化,变化的方向为负,从而使被控变量下降回到给定值,这样就达到了控制的目的。
控变量的干扰是什么?Z被控对象:反应器 A 、B 的流量、温度。
13.结合11题,说明该温度控制系统是一个具有负反馈的闭环系统。
当被控变量反应温度上升后,反馈信号升高,经过比较使控制器的偏差信号e 降低。
此时,控制器将发出信号而使控制阀的开度变大,加大冷却水流量,从而使被控变量下降到S.P 。
所以该温度控制系统是一个具有反馈的闭环系统。
14.图1-18所示的温度控制系统中,如果由于进料温度升高使反应器内的温度超过给定值,试说明此时该控制系统的工作情况,此时系统是如何通过控制作用来克服干扰作用对被控制变量影响的?当反应器的温度超过给定值时,温度控制器将比较的偏差经过控制运算后,输出控制信号使冷却水阀门开度增大,从而增大冷却水流量,使反应器内的温度降下来。
这样便可以通过控制作用克服干扰作用对被控变量的影响。


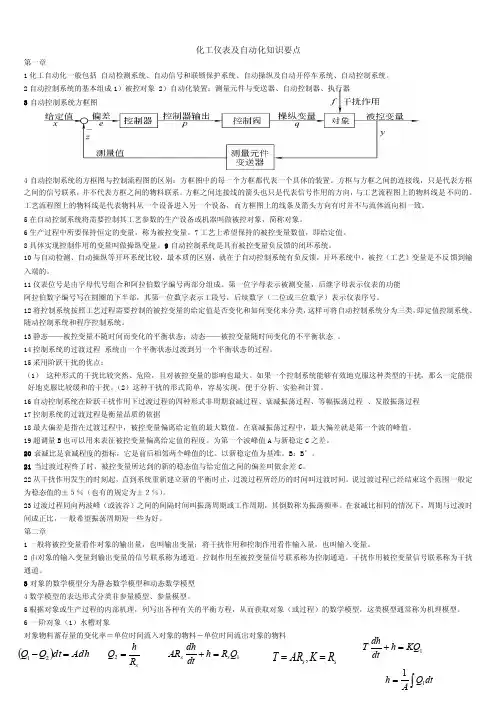
化工仪表及自动化知识要点第一章1化工自动化一般包括 自动检测系统、自动信号和联锁保护系统、自动操纵及自动开停车系统、自动控制系统。
2自动控制系统的基本组成1)被控对象 2)自动化装置:测量元件与变送器、自动控制器、执行器3自动控制系统方框图4自动控制系统的方框图与控制流程图的区别:方框图中的每一个方框都代表一个具体的装置。
方框与方框之间的连接线,只是代表方框之间的信号联系,并不代表方框之间的物料联系。
方框之间连接线的箭头也只是代表信号作用的方向,与工艺流程图上的物料线是不同的。
工艺流程图上的物料线是代表物料从一个设备进入另一个设备,而方框图上的线条及箭头方向有时并不与流体流向相一致。
5在自动控制系统将需要控制其工艺参数的生产设备或机器叫做被控对象,简称对象。
6生产过程中所要保持恒定的变量,称为被控变量。
7工艺上希望保持的被控变量数值,即给定值。
8具体实现控制作用的变量叫做操纵变量。
9自动控制系统是具有被控变量负反馈的闭环系统。
10与自动检测、自动操纵等开环系统比较,最本质的区别,就在于自动控制系统有负反馈,开环系统中,被控(工艺)变量是不反馈到输入端的。
11仪表位号是由字母代号组合和阿拉伯数字编号两部分组成。
第一位字母表示被测变量,后继字母表示仪表的功能阿拉伯数字编号写在圆圈的下半部,其第一位数字表示工段号,后续数字(二位或三位数字)表示仪表序号。
12将控制系统按照工艺过程需要控制的被控变量的给定值是否变化和如何变化来分类,这样可将自动控制系统分为三类,即定值控制系统、随动控制系统和程序控制系统。
13静态——被控变量不随时间而变化的平衡状态;动态——被控变量随时间变化的不平衡状态 。
14控制系统的过渡过程 系统由一个平衡状态过渡到另一个平衡状态的过程。
15采用阶跃干扰的优点:(1) 这种形式的干扰比较突然、危险,且对被控变量的影响也最大。
如果一个控制系统能够有效地克服这种类型的干扰,那么一定能很好地克服比较缓和的干扰。
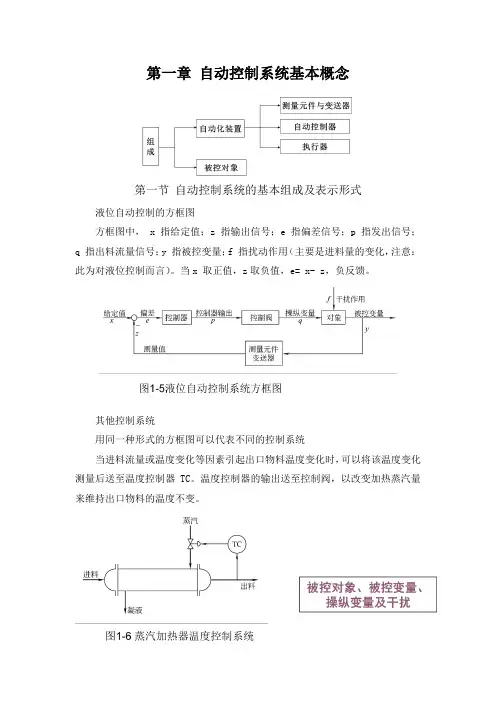
第一章自动控制系统基本概念第一节自动控制系统的基本组成及表示形式液位自动控制的方框图方框图中, x 指给定值;z 指输出信号;e 指偏差信号;p 指发出信号;q 指出料流量信号;y 指被控变量;f 指扰动作用(主要是进料量的变化,注意:此为对液位控制而言)。
当x 取正值,z取负值,e= x- z,负反馈。
其他控制系统用同一种形式的方框图可以代表不同的控制系统当进料流量或温度变化等因素引起出口物料温度变化时,可以将该温度变化测量后送至温度控制器TC。
温度控制器的输出送至控制阀,以改变加热蒸汽量来维持出口物料的温度不变。
小结:自动控制系统是具有被控变量负反馈的闭环系统。
举例:乙烯生产过程中脱乙烷塔的工艺管道及控制流程图第二节自动控制系统的基本组成及表示形式T 温度,P 压力(真空度),L 物位,F 流量I 指示,R 记录,A 报警,C 控制(调节)塔顶的压力控制系统中的PIC-207,PIC的组合就表示一台具有指示功能的压力控制器。
LIC-201是一台具有指示功能的液位控制器。
FRC-210表示一台具有记录功能的温度控制器。
PIC-207表示压力指示调节仪表,该仪表为就地安装,工段号为2,仪表序号为07。
第三节自动控制系统的分类1.定值控制系统:被控变量的给定值不变2.随动控制系统(自动跟踪系统):给定值随机变化第四节自动控制系统的过渡过程和品质指标控制系统的过渡过程:系统由一个平衡状态过渡到另一个平衡状态的过程。
当干扰作用于对象,系统输出y发生变化,在系统负反馈作用下,经过一段时间,系统重新恢复平衡。
常用的是阶跃干扰。
采用阶跃干扰的优点:这种形式的干扰比较突然、危险,且对被控变量的影响也最大。
如果一个控制系统能够有效地克服这种类型的干扰,那么一定能很好地克服比较缓和的干扰。
这种干扰的形式简单,容易实现,便于分析、实验和计算。
举例:某换热器的温度控制系统在单位阶跃干扰作用下的过渡过程曲线如下图所示。
第一章,自动控制系统1、化工自动化主要包括哪些内容。
自动检测,自动保护,自动操纵和自动控制等。
2、闭环控制系统与开环控制系统的区别。
闭环控制系统有负反馈,开环系统中被控变量是不反馈到输入端的。
3、自动控制系统主要有哪些环节组成。
自动化装置及被控对象。
4、什么是负反馈,负反馈在自动控制系统中的意义。
这种把系统的输出信号直接或经过一些环节重新返回到输入端的做法叫做反馈,当反馈信号取负值时叫负反馈。
5、自动控制系统分类。
定值控制系统,随动控制系统,程序控制系统6、自动控制系统衰减振荡过渡过程的品质指标有及影响因素。
最大偏差,衰减比,余差,过渡时间,振荡周期对象的性质,主要包括换热器的负荷大小,换热器的结构、尺寸、材质等,换热器内的换热情况、散热情况及结垢程度等。
7、什么是静态和动态。
当进入被控对象的量和流出对象的量相等时处于静态。
从干扰发生开始,经过控制,直到系统重新建立平衡,在这一段时间中,整个系统的各个环节和信号都处于变动状态之中,所以这种状态叫做动态。
第二章,过程特性及其数学模型1、什么是对象特征,为什么要研究它。
对象输入量与输出量之间的关系系统的控制质量与组成系统的每一个环节的特性都有密切的关系。
特别是被控对象的特性对控制质量的影响很大。
2、建立对象的数学模型有哪两类机理建模:根据对象或生产过程的内部机理,列写出各种有关的平衡方程,从而获取对象的数学模型。
实验建模:用实验的方法来研究对象的特性,对实验得到的数据或曲线再加以必要的数据处理,使之转化为描述对象特性的数学模型。
混合建模:将机理建模和实验建模结合起来的,先由机理分析的方法提供数学模型的结构形式,然后对其中某些未知的或不确定的参数利用实测的方法给予确定。
3、反映对象特性的参数有哪些。
各有什么物理意义。
它们对自动控制系统有什么影响。
放大系数K:对象重新稳定后的输出变化量与输入变化量之比。
对象的放大系数K越大,就表示对象的输入量有一定变化时对输出量的影响越大。